具有通信约束的网络控制系统动态调度与
状态反馈控制的协同设计
杜明莉,周川,陈庆伟
(南京理工大学 自动化学院,江苏 南京,210094)
摘要:针对一类具有通信约束的随机时延网络控制系统,提出一种基于TOD动态调度策略与状态反馈控制器协同设计的方法。考虑通信约束和随机时延的影响,将系统建模为一类具有参数不确定性的离散切换系统,并采用切换系统和Lyapunov稳定性理论,给出TOD调度策略下使闭环系统渐近稳定的控制器设计方法。最后通过仿真验证方法的有效性。
关键词:网络控制系统;通信约束;随机时延;TOD动态调度策略;协同设计
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S1-0386-06
Co-design of dynamic scheduling and state feedback control for networked control systems with communication constraints
DU Ming-li, ZHOU Chuan, CHEN Qing-wei
(School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China)
Abstract: A co-design scheme of TOD dynamic scheduling strategy and the state feedback controller for a class of networked control system with communication constraints and random time delay is proposed. Considering communication constraints and random time delay, NCS is modeled as a discrete-time switched system with parameter uncertainty. Based on the Lyapunov function and switched system theory, a procedure for feedback controller design under TOD scheduling strategy is given to maintain the asymptotic stability of close-loop system. Finally, a simulation example demonstrates the efficiency of the proposed method.
Key words: networked control system; communication constraints; random time delay; TOD dynamic scheduling strategy; co-design
网络控制系统(Networked control system, NCS)是反馈控制回路通过一个实时网络进行通信的系统,系统的控制器与被控对象以及执行器、传感器之间通过网络传输信息,以实现远程控制。与传统的控制系统相比,NCS具有连线少、成本低、可靠性高、信息资源共享、可远程控制等优点[1]。但由于网络的引入,给控制系统的设计带来许多新的难题,如网络诱导时延、数据包丢失、数据包时序错乱和网络通信约束等。因此,NCS的分析与设计得到广泛的关注与研究。时延是导致NCS性能下降的重要因素,目前国内外对时延问题已获得较为丰富的研究结果[2-4],而对具有通信约束的NCS的研究相对较少。通信约束可分为介质 访问约束、位数率约束和信息速率约束,已有的研究结果大多针对介质访问约束[5-10]和位数率约束[11-14]。网络通信介质访问约束的概念是指同一时刻NCS只能允许有限个节点接入网络传输数据。Dacic等[7]针对具有通信约束的网络控制系统,将其建模为混合系统,基于弱局部状态Lyapunov函数的控制方法,通过同步设计调度协议和动态输出反馈控制器保证系统二次稳定。Donkers等[8]将具有通信约束和时变传输间隔的NCS建模为离散切换不确定系统,并将其近似转化为带有界范数不确定性的多项式系统,通过给出一个二次型协议,并利用Lyapunov函数的方法证明系统是全局一致指数稳定的。但以上结果均未考虑时延的影响,且均假设每次传输仅有一个节点的数据被传输。国内的研究虽然同时考虑了通信约束和时延对NCS的影响,但是大多采用静态调度策略而导致方法保守性较强[9-10]。
本文作者针对一类具有通信约束和随机短时延的NCS,提出一种基于TOD动态调度策略与状态反馈控制器的协同设计方法,以保证闭环系统渐近稳定。由于通信约束的影响,系统同一时刻只允许有限个节点通过网络传输数据,每次进行数据传输的节点由TOD动态调度策略决定,并将时延的不确定性转化为系统参数的不确定性,将系统建模为一类具有参数不确定性的离散切换系统,采用切换系统和Lyapunov稳定性理论,给出了TOD调度策略下使闭环系统渐近稳定控制器的设计方法;最后,通过仿真验证该方法的有效性。
1 问题描述
若网络控制系统中被控对象为如下连续线性时不变状态方程:
 (1)
(1)
其中:x(t) Rn,u(t)Rm分别为被控对象的状态变量
Rn,u(t)Rm分别为被控对象的状态变量
和控制输入。Ap和Bp为适维矩阵。
网络控制系统的结构如图1所示,图中被控对象接有n个传感器和m个执行器,传感器和执行器通过网络与远程控制器相连。传感器与控制器之间的网络诱导时延为 ,控制器与执行器之间的网络诱导时延为
,控制器与执行器之间的网络诱导时延为 。
。
假设 1:传感器为时间驱动,采样周期为h,控制器与执行器均为事件驱动。
假设 2: 是时变的,且
是时变的,且 。
。
假设3:由于网络带宽的限制,传感器或控制信号不能同时全部传输,每次只能传输ds(0s≤n)个状态向量和dc(0c≤m)个控制信号。
被控对象的离散化状态方程为:
 (2)
(2)
其中:

由假设3中网络带宽约束条件,在每次传输中均需对网络各节点进行调度,引入传感器-控制器调度矢量θ(k)和控制器-执行器调度矢量δ(k),其具体形式如下:
 i(1, 2, …, n)
i(1, 2, …, n)
 i(1, 2, …, m)
i(1, 2, …, m)
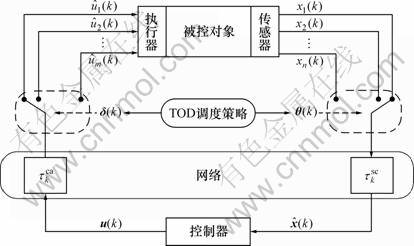
图1 网络控制系统结构图
Fig.1 Structure of networked control system
在第k个采样周期,调度矢量θ(k)=[θ1(k), θ2(k), …, θn(k)]决定允许传输的传感器节点,而调度矢量δ(k)=[δ1(k), δ2(k), …, δm(k)]则决定允许传输的控制节点。定义Λ(k)=diag(θ(k)),则控制器节点接收到的有效更新数据为Λ(k)x(k),而其他未被更新的数据由零阶保持器(ZOH)保持上一次的值。因此控制器的输入为:
 (3)
(3)
同样,定义 ,则被控对象的输入为:
,则被控对象的输入为:
 (4)
(4)
由于该NCS共有n个传感器节点和m个执行器节点,而每次传输仅有ds个传感器节点和dc个执行器节点可以接入网络并通过网络传输数据。若将每一种节点选择接入网络的方案作为一种模态,则系统具有 种模态,每一种模态i(i=1, 2, …, N)对应一组Λi(k)和Πi(k),由式(2)、(3)和(4)可得NCS的广义离散模型:
种模态,每一种模态i(i=1, 2, …, N)对应一组Λi(k)和Πi(k),由式(2)、(3)和(4)可得NCS的广义离散模型:
 (5)
(5)
该系统具有N种模态,即N个子系统,各个子系统间的切换将采用TOD策略进行调度。
2 动态调度策略与状态反馈控制的协同设计
2.1 TOD调度与状态反馈控制
TOD动态调度算法是指具有最大加权误差的节点优先获得传输,其中误差是指当前时刻需要传输的信息与上一次网络传输的信息之差,而未传输的数据将被下一次更新值替代。而本文作者所研究的问题是每次传输并不限于传输单一的节点,而是一种模态下的多个节点。由式(5)表示的离散切换系统具有N种模态,即N个切换子系统。若定义 ,
,  , i=1, 2, …, N,si(k)表示第k个采样周期系统切换到第i种模态。令
, i=1, 2, …, N,si(k)表示第k个采样周期系统切换到第i种模态。令 ,即
,即 。定义误差为:
。定义误差为:
 (6)
(6)
根据TOD动态调度算法可得切换函数:

 (7)
(7)
其中:arg定义为一个取下标函数,Γi(i=1, 2, …, N)对应第i种模态,σ{1, 2, …, N}。
考虑离散状态反馈控制器:
 (8)
(8)
其中: Rn,
Rn, Rm,分别为控制器的输入和输出,Kσ为引入TOD调度策略后不同切换模态下的状态反馈增益。因此,引入TOD调度策略和状态反馈控制器所得的离散切换系统模型为
Rm,分别为控制器的输入和输出,Kσ为引入TOD调度策略后不同切换模态下的状态反馈增益。因此,引入TOD调度策略和状态反馈控制器所得的离散切换系统模型为
 (9)
(9)
以下将 ,
,  简记为Λσ, Πσ。
简记为Λσ, Πσ。
由假设2可知: ,是随机变化的,因此,B0(τk)和B1(τk)也是时变的,则可将B0(τk)和B1(τk)分别表示为:
,是随机变化的,因此,B0(τk)和B1(τk)也是时变的,则可将B0(τk)和B1(τk)分别表示为:

 (10)
(10)
其中: ,设
,设 取
取

则
 ,
,
 ,E=Bp
,E=Bp
均为常数矩阵, 是随τk的变化而变化的,并满足
是随τk的变化而变化的,并满足 .
.
选取增广向量

可得闭环控制系统方程为:
 σ{1, 2, …, N} (11)
σ{1, 2, …, N} (11)
 (12)
(12)
其中:



 ,
,
 ,
,
2.2 基于稳定性的TOD动态调度与反馈控制器设计
引理 1(Schur补):对给定的系统矩阵

其中S11是r×r矩阵,则以下3个条件是等价的:
(1) S<0
(2)
(3)
引理2: 设W, M, N, F(k)为具有适当维数的实矩阵,其中F(k)满足 ,W为对称阵,则
,W为对称阵,则

当且仅当存在常数ε>0,使得

定理1:对于上述TOD动态调度策略及反馈控制器(8)作用下的闭环网络控制系统(11),若存在一个共同矩阵P=PT>0,使得下列矩阵不等式成立:
 σ=1, 2, …, N (13)
σ=1, 2, …, N (13)
则闭环网络控制系统渐近稳定。
证明:选取共同Lyapunov函数V(z(k))=zT(k)Pz(k)

由引理1可知,式(13)与 ,σ=1, 2, …, N等价,所以ΔV(k)<0,故闭环网络控制系统是渐近稳定的。
,σ=1, 2, …, N等价,所以ΔV(k)<0,故闭环网络控制系统是渐近稳定的。
由于 中含有不确定参数
中含有不确定参数 ,其随τk的变化而变化,则可得到如下定理。
,其随τk的变化而变化,则可得到如下定理。
定理2:对于上述TOD动态调度策略及反馈控制器(8)作用下的闭环网络控制系统(11),若存在一个矩阵X=XT>0,状态反馈增益矩阵Kσ,以及一组标量εσ>0 (σ=1, 2, …, N),使得下列矩阵不等式成立:
 (14)
(14)
其中:
则闭环网络控制系统渐近稳定。式中“*”表示由对称性得到的矩阵块。
证明:将式(12)代入式(13)经过变换得:
 (15)
(15)
由引理2,上式等价于

 (16)
(16)
再由引理1,式(17)等价于
 (17)
(17)
其中:

令X=P-1,将式(17)分别左乘和右乘diag(I, X, I),则式(17)等价于式(14)。
由上述稳定性分析,只要求解定理2中使系统渐近稳定的线性矩阵不等式即可。但由于式(14)是关于变量Kσ和X的双线性矩阵不等式,所以直接求解Kσ比较困难。因此令Yσ=KσΔσX,则式(14)可转化为如下LMI形式:
 (18)
(18)
其中:
因此,可按如下步骤求取状态反馈增益Kσ,σ=1, 2, …, N:
(1) 求解LMI式(18),得到可行解X和Yσ。
(2) 利用 ,求解反馈控制器增益Kσ,其中
,求解反馈控制器增益Kσ,其中 广义逆。
广义逆。
4 仿真算例
考虑如下NCS的被控对象状态方程:
其中:传感器的采样周期h=0.2 s,由式(2)和(10)进行计算可得到如下参数:
 ,
,
 ,
,

由于该系统有1个控制输入和2个状态,取ds=dc=1,因此,该网络控制系统具有2种切换模态,分别由  ,
, 表示,由式(11)和定理2,利用LMI工具箱求解式(18),并由Kσ=
表示,由式(11)和定理2,利用LMI工具箱求解式(18),并由Kσ=  得到控制器增益:
得到控制器增益:


在求取控制器增益后,利用Truetime工具箱进行上述网络控制系统的仿真。设定随机时间为(0, 0.2)范围内的随机数,当初始条件为 时,基于上述协同控制方法控制的闭环网络控制系统的状态响应曲线见图2,系统切换模态响应曲线见图3。可见,该NCS在TOD动态调度策略与状态反馈控制的协同作用下是渐近稳定的。
时,基于上述协同控制方法控制的闭环网络控制系统的状态响应曲线见图2,系统切换模态响应曲线见图3。可见,该NCS在TOD动态调度策略与状态反馈控制的协同作用下是渐近稳定的。
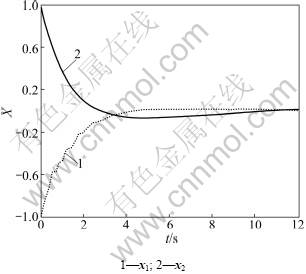
图2 状态响应曲线
Fig.2 Response curves of states
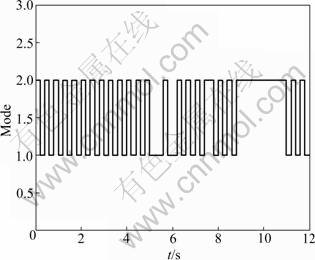
图3 切换模态响应曲线
Fig.3 Response curves of switch modes
4 结论
针对具有通信约束和随机时延的网络控制系统,通过将其建模为带有不确定性参数的离散切换系统,并提出了一种TOD动态调度与状态反馈控制器协同设计方法以保证闭环网络控制系统渐近稳定。后续工作是在此基础上进一步考虑具有扰动或故障情况下的NCS动态调度策略与H∞鲁棒控制器协同设计的研究。
参考文献:
[1] Bushnell L G. Networks and control[J]. Control Systems Magazine, 2001, 21(1): 22-23.
[2] Tipsuwan Y, Chow M Y. Control methodologies in networked control systems[J]. Control Engineering Practice, 2003, 11(10): 1099-1111.
[3] YANG Fui-wen, WANG Zi-dong, Gani M, et al. H∞ control for networked systems with random communication delays[J]. IEEE Transactions on Automation Control, 2006, 251(3): 511-518.
[4] GAO Hui-jun, CHEN Tong-wen, Lam J. A new delay system approach to network-based control[J]. Automatica, 2008, 44(1): 39-52.
[5] Maurice W P, Heemels H, Teel A R, et al. Networked control systems with communication constraints: Tradeoffs between transmission intervals, delays and performance[J]. IEEE Transactions on Automation Control, 2010, 55(8): 1781-1796.
[6] Carnevale D, Teel A R, Nesic D. A Lyapunov proof of improved maximum allowable transfer interval for networked control systems[J]. IEEE Transactions on Automation Control, 2007, 52(5): 892-897.
[7] Dacic D B, Nesic D. Quadratic stabilization of linear networked control systems via simultaneous protocol and controller design[J]. Automatica, 2007, 43(7): 1145-1155.
[8] Donkers M C F, Hetel L, Heemels W P M H, et al. Stability analysis of networked control systems using a switched linear systems approach, in hybrid systems: Computation and control, lecture notes in computer science[C]//Proceedings of the 12th International Conference on Hybrid Systems: Computation and Control. New York: Springer Verlag, 2009: 150-164.
[9] 陈慧英. 资源受限的网络控制系统控制与调度方法研究[D]. 杭州: 浙江工业大学, 2008: 31-48.
CHEN Hui-ying. Research on control and scheduling methods for networked control systems with resource constraints[D]. Hangzhou: Zhejiang University of Technology, 2008: 31-48.
[10] Song H, Yu L, Zhang W A. Stabilisation of networked control systems with communication constraints and multiple distributed transmission delays[J]. Control Theory and Application, 2008, 3(10): 1307-1316.
[11] Tatikonda S, Mitter S K. Control under communication constraints[J]. IEEE Transactions on Automation Control, 2004, 49(7): 1056-1068.
[12] Brockett R W, Liberzon D. Quantized feedback stabilization of linear systems[J]. IEEE Transactions on Automation Control, 2000, 45(7): 1279-1289.
[13] Elia N, Mitter S K. Stabilization of linear systems with limited information[J]. IEEE Transactions on Automatic Control, 2001, 46(9): 1384-1400.
[14] Tsumura K, Ishii H, Hoshina H. Tradeoffs between quantization and packet loss in networked control of linear systems[J]. Automatica, 2009, 45(12): 2963-2970.
(编辑 杨兵)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:江苏省自然科学基金资助项目(BK2007206);南京理工大学自主科研计划资助项目(2010GJPY066);南京市留学回国科技择优资助项目
通信作者:周川(1970-),男,江苏南京人,博士,教授,从事智能控制与网络控制研究;电话:025-84315463-307; E-mail: njust_zc@yahoo.com.cn

