一种相关型模糊集合及其在模糊逻辑系统中的应用
岳菊梅1,陈秋双1,陈增强2
(1. 南开大学 信息技术科学学院,控制优化与物流管理研究室,天津,300071;
2. 南开大学 信息技术科学学院,智能预测自适应研究室,天津,300071)
摘要:基于t-范数和t-余范数的模糊推理无法将模糊规则中前件集与后件集的相关性信息引入到模糊推理过程,这在某些情况下会导致模糊推理结果与实际经验不符。针对此问题,首先引入模糊集合之间相关度的概念,使模糊概念之间彼此相关。然后,在模糊集合相互关联的环境下提出相关型模糊集合的概念,包括相关type-1、相关区间型type-2以及相关一般型type-2模糊集合,并在理论上把模糊集合的基本概念和运算性质放在相关型模糊集合的环境下进行讨论,同时定义其自身特有的一些运算。最后,对相关型模糊集合在2种模糊逻辑系统(T1 FLS和IT2 FLS)中的应用进行探索,提出面向后件集的模糊推理方法。仿真实例表明:该方法比传统的模糊推理方法能捕获到规则中更多的不确定性信息。
关键词:模糊控制;模糊推理;模糊逻辑系统;区间型type-2 FLS
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2014)02-0441-09
An interrelated fuzzy set and its application to fuzzy logic systems
YUE Jumei1, CHEN Qiushuang1, CHEN Zengqing2
(1. Control Optimization and Logistics Management Lab,
College of Information Technical Science, Nankai University, Tianjin 300071, China;
2. Intelligent Predictive Adaptive Control Lab, College of Information Technical Science,
Nankai University, Tianjin 300071, China)
Abstract: Fuzzy inference methods based on t-norms or t-conorms are unable to bring the interrelated information between antecedents and consequents into the process of fuzzy inference, which can cause inconsistency between inference results and practical experience in some cases. To solve the problem, the concept of relation grade among fuzzy sets that can make fuzzy concepts interrelated was firstly introduced, and the concepts of interrelated fuzzy sets, such as interrelated type-1, interval type-2, and general type-2 fuzzy sets, were proposed in an environment where fuzzy sets were related with each other. Furthermore, the fundamental concepts and operations of fuzzy sets were discussed in terms of such fuzzy sets, and in particular, some of its unique operations were defined, too. Finally, some applications of such sets to fuzzy logic systems, such as type-1, interval type-2, and general type-2 fuzzy logic systems, were explored in a preliminary way, and a fuzzy reasoning method was put forward. Simulation results indicate that the proposed method can capture more information about rule uncertainties than the conventional fuzzy reasoning methods do.
Key words: fuzzy control; fuzzy reasoning; fuzzy logic systems; interval type-2 fuzzy logic systems
作为处理不确定性和不精确性的有力工具,模糊集合和模糊逻辑已在医学、生物学、系统工程、机器人规划、经济学、心理学等领域得到极为广泛的应用,目前仍是模糊控制领域的研究热点,特别是高阶的模糊集合与模糊逻辑系统,如区间型和一般型type-2模糊集合及模糊逻辑系统[1-3]。然而,在基于相似度比较的模糊决策和疾病诊断的模糊专家系统中,有时模糊推理的结果令人难以作出决策[4-5],在微机械系统的混合模块模糊逻辑控制器的设计和用于图像降噪的模糊逻辑滤波器以及病症的分类中,模糊逻辑系统的输出有时也会出现失真的现象[6]。究其原因,在基于规则的模糊逻辑系统中,不确定性存在于模糊规则中的前件集和后件集以及模糊算子中。前件集和后件集通常采用模糊集合甚至是模糊的模糊集合(type-2模糊集合、区间型type-2模糊集合)进行建模,因此,模糊概念本身的不确定性在模糊推理中应该得到充分体现;同时,人们对模糊算子也提出多种模型,如含参数的t-范数和t-余范数、补偿算子、有序加权平均算子(OWA)以及S-OWA算子等等[7]。此外,Seki等[8]和Yubazaki等[9]也分别提出了规则加权和SIRMS模糊推理方法。既然系统的不确定性得到了充分体现,为什么还会出现上述问题,本文作者认为部分原因可能是在模糊推理的过程中忽略了前件集与后件集之间的相关性信息。事实上,事物之间总是相互联系、相互影响的,其相互间的影响程度也各不相同。因此,同一事物在不同的环境中扮演着不同的角色。同样,作为表达人们模糊思维的有力工具――模糊集合也不例外。因此,模糊规则中不同的前件集对同一个后件集的相关度(或者说影响度、贡献度)也可能各不相同,如洗衣机洗衣服,衣服上的泥沙量和油脂量对洗涤时间的影响就不同。基于模糊概念间的相关性,本文尝试将模糊概念之间的相关性信息引入到模糊集合中,提出相关模糊集合的概念,并讨论它的一些基本属性、含义和应用。进而,为了在模糊逻辑系统中将模糊规则中的前件集与后件集的相关性信息引入到模糊推理过程,基于相关模糊集合的概念提出面向后件集的模糊推理方法,即让每个前件集的相关模糊集合(而不是前件集本身)参与模糊推理。实例仿真表明:该方法能够利用模糊规则中更多的模糊信息,从而使得推理结果更加符合实际经验。
1 模糊概念间相关度的解释
由于事物的相互关联性,同一事物在不同的环境中扮演着不同的角色。例如,设模糊集合A和I分别表示“高能力”和“好品德”2个模糊概念,它们分别为论域U上的模糊集合,U={a,b},a和b表示2个人。设A(a)=0.9,I(a)=0.6,A(b)=0.6,I(b)=0.7,现用“德才兼备”的标准在其中选拔一人去担任一件具有“挑战性的工作”。这里“德才兼备”用模糊集合A∩I表示,“挑战性的工作”用模糊集合J表示。采用扎德的取小t-范数进行模糊推理,结果是(A∩I)(a)=0.9∧0.6=0.6和(A∩I)(b)=0.6∧0.7=0.6,即2人具有同样的竞争力,因此难于作出决策。而事实上,这项“挑战性的工作”可能对“德”和“才”具有不同的要求。如“技术攻关”和“爱心大使”对“才”和“德”就有明显不同的要求。本文把这种模糊概念之间的相关程度称作相关度。简单的情形,这种相关度可用一个介于[0,1]之间的清晰数来描述。假设“才”和“德”对这项工作的相关度分别为0.2和0.7,据相关度重新考虑上述问题。此时,结果可能是(A∩I)(a)=(0.9×0.2)∧(0.6×0.7)=0.18,(A∩I)(b)=(0.6×0.2)∧(0.7×0.7)=0.12。由此应该选a去承担这项“挑战性的工作”。若“才”和“德”对这项工作的相关度分别为0.8和0.5,则结果可能是(A∩I)(a)=(0.9×0.8)∧(0.6×0.5)=0.3,(A∩I)(b)=(0.6×0.8)∧(0.7×0.5)=0.35。此时应选b而不是a。
尽管利用其他t-范数,比如LUK,PRODUCT或者其他代数t-范数(Archimedean t-norms)也可以选拔出a或b去担任这项工作,但这些模糊推理没考虑“挑战性的工作”对“才”和“德”的实际相关性,因此,并不能很好地反映客观实际。
2 相关type-1模糊集合
2.1 相关type-1模糊集合的定义
定义1 设A是论域X上的type-1模糊集合,其隶属函数为fA(x);R是论域Z上的type-1模糊集合,称为A的参考集。并设A对R的相关度为r, 。定义A的以R为参考集的相关模糊集合为论域X上的模糊集合AR,其隶属函数为rfA(x)。在不混淆的情况下,简称AR为相关模糊集合。
。定义A的以R为参考集的相关模糊集合为论域X上的模糊集合AR,其隶属函数为rfA(x)。在不混淆的情况下,简称AR为相关模糊集合。
注:若不考虑A对R的相关度r,即在一个独立的环境下研究模糊集合,则相关模糊集合AR就退化为一般的模糊集合A。尽管模糊集合间相关度的概念与模糊关系的概念有些相似,但二者之间有着本质的不同。事实上,模糊关系反映的是2个集合元素之间的相关程度,它是一个模糊集合。而模糊集合之间的相关度刻画的是模糊集合之间的相关关系,它可以是一个清晰数,也可以是一个模糊数。
在实际应用中,有时概念间的相关度不易(或不宜)用清晰数表示,自然的思路是利用type-1模糊集合对其进行建模。这就需要对相关模糊集合的定义进行扩展。
定义2 设A是论域X上的type-1模糊集合,其隶属函数为fA(x),R是论域Z上的type-1模糊集合,称为A的参考集。并设A对R的相关度是论域Y( )上的模糊数C,其隶属函数为fC(y)。A的以R为参考集的相关模糊集合为论域X上的模糊集合AR,由以下4步来定义(如图1所示)。
)上的模糊数C,其隶属函数为fC(y)。A的以R为参考集的相关模糊集合为论域X上的模糊集合AR,由以下4步来定义(如图1所示)。
1) 让yi∈Y与fA(x)相乘,得到一个隶属函数为 的type-1模糊集合,记作Ayi(图1(a))。
的type-1模糊集合,记作Ayi(图1(a))。
2) 赋予Ayi一个次隶属度fC(yi),得到一个type-2模糊集合,记作 。Ayi中的每个元素的次隶属度均等于fC(yi)。便于观察,将放在一个三维坐标系下,如图1(b)所示。
。Ayi中的每个元素的次隶属度均等于fC(yi)。便于观察,将放在一个三维坐标系下,如图1(b)所示。
3) 重复步骤1)和2),直到fA(x)与Y中的每个元素都相乘。Y中的每一元素均确定1个type-2模糊集合。所有的type-2模糊集合的主隶属函数充满A的隶属函数图像所围成的整个区域(见图1(c)阴影部分)。从而论域X中的每个元素x′具有介于 的主隶属度,其中,
的主隶属度,其中, 中的任意元素u具有唯一的次隶属度fC(u)(见图1(c)中的u点)。得到1个type-2模糊集合
中的任意元素u具有唯一的次隶属度fC(u)(见图1(c)中的u点)。得到1个type-2模糊集合 ,
, 。
。
4) 对 进行降型。降型的结果AR定义为A的以R为参考集的相关type-1模糊集合。图1(d)所示为以质心降型为例的示意图。质心降型的公式见文献[1-3]。
进行降型。降型的结果AR定义为A的以R为参考集的相关type-1模糊集合。图1(d)所示为以质心降型为例的示意图。质心降型的公式见文献[1-3]。
显然,当模糊数C退化为清晰数 时,定义2退化为定义1。
时,定义2退化为定义1。
在一般情况下,type-2模糊集合的次隶属函数难以确定,而在步骤3中,能够得到明确的次隶属函数表达式,因此,对于来说,type-2模糊集合的一些运算变得易于实施,如并运算、交运算、补运算以及实时运算瓶颈的降型运算等。从而,尽管定义显得有些复杂,特别是步骤4中的降型运算,实际上,明确的次隶属函数使得降型运算易于进行。
由于相关模糊集合包含了2个模糊集合之间的相关性信息,因此,将其应用到模糊推理过程中,应该可以捕获到模糊规则中更多的不确定性信息。
相关模糊集合本质上还是一个模糊集合,不同的是它体现了模糊集合之间的相关性信息,因此,模糊集合的一些基本概念和运算性质对于相关模糊集合来说,有了一定的扩展。如相关模糊集合AR是空集,当且仅当A是空集或者A对R的相关度为0时;相关模糊集合AR和BR相等并不意味着A和B相等,反之亦然;“属于”的概念也有如下区别:(1) “x属于A”,即fA(x)≥α,则不一定有“x属于AR”;(2) “x不属于A”,即fA(x)≤β,则一定有“x不属于AR”;(3) “x与A的隶属关系不明确”,即β<fA(x)<α,则不一定有“x与AR的关系不明确”。事实上,x可以不属于AR。
2.2 模糊集合的相关自运算
模糊集合的相关自运算是在多个参考标准下确定相关模糊集合的一种运算。例如,将“英俊”和“强壮”作为参考集,“胖”对应2个不同的相关模糊集合。那么,将双重标准“既英俊又强壮”作为参考集,下面讨论“胖”对应的相关模糊集合。
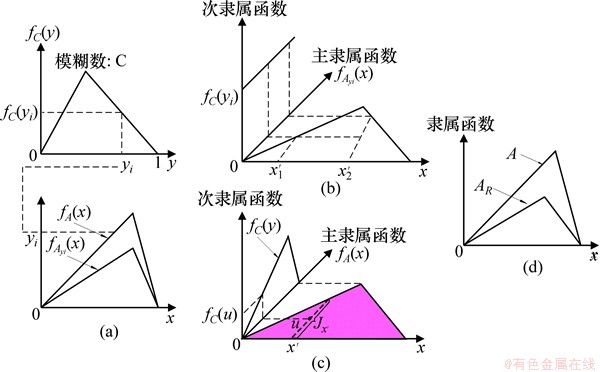
图1 定义2的过程示意图
Fig. 1 Schematic diagram for Definition 2
定义3 设A是论域X上的模糊集合, 和
和 分别是A的以R1和R2为参考集的相关模糊集合,其隶属函数分别为
分别是A的以R1和R2为参考集的相关模糊集合,其隶属函数分别为 和
和 。A的相关自交集、相关自并集、相关自相等定义如下。其中,★和△分别表示t-范数和t-余范数。
。A的相关自交集、相关自并集、相关自相等定义如下。其中,★和△分别表示t-范数和t-余范数。
1) A的相关自交集是论域X上的相关模糊集合 ,其隶属函数为
,其隶属函数为
 (1)
(1)
2) A的相关自并集是论域X上的相关模糊集合,其隶属函数为
 (2)
(2)
3) 和是相关自相等的,记为 ,当且仅当对论域X上的所有x都有
,当且仅当对论域X上的所有x都有 。特别地,当A对R1和R2的相关度分别是清晰数r1和r2时,当且仅当r1=r2。
。特别地,当A对R1和R2的相关度分别是清晰数r1和r2时,当且仅当r1=r2。
定义3可以扩展到n(n>2)个参考集的情况:
 (3)
(3)
 (4)
(4)
若上式中的★和△分别采用取小t-范数和取大t-余范数,则式(3)和(4)分别等价于:
 (5)
(5)
 (6)
(6)
进而,De Morgan定律和分配律性质成立。
3 相关区间型和一般型type-2模糊集合
相关模糊集合的概念可从type-1的情形推广到区间型和一般型type-2模糊集合的情形。
定义4 设 是论域X上的区间型type-2模糊集合,其FOU(footprint of uncertainty)由下隶属函数
是论域X上的区间型type-2模糊集合,其FOU(footprint of uncertainty)由下隶属函数 和上隶属函数
和上隶属函数 确定,二者对应论域X上的模糊集合L和U。R是论域Z上参考集。U和L以R为参考集的相关模糊集合分别为UR和LR,其隶属函数分别记为
确定,二者对应论域X上的模糊集合L和U。R是论域Z上参考集。U和L以R为参考集的相关模糊集合分别为UR和LR,其隶属函数分别记为 和
和 。以R为参考集的相关模糊集合为论域X上的区间型type-2模糊集合,其LMF和UMF分别为和(LMF,UMF分别为下隶属函数和上隶属函数)。
。以R为参考集的相关模糊集合为论域X上的区间型type-2模糊集合,其LMF和UMF分别为和(LMF,UMF分别为下隶属函数和上隶属函数)。
当相关度是模糊数时,将相关模糊集合的概念从type-1模糊集合推广到一般型type-2模糊集合的过程比较复杂,本文只讨论相关度是清晰数的情形。
定义5 设是论域X上的一般型type-2模糊集合,其LMF和UMF分别为和(分别对应论域上的X type-1模糊集合L和U),即

 (7)
(7)
R是论域Z上的参考集,并设与R的相关度为[0,1]上的清晰数r。U和L以R为参考集的相关模糊集合分别为UR和LR,其隶属函数分别为和。的以R为参考集的相关模糊集合为论域X上的一般型type-2模糊集合,其定义为:
 ;
;
 (8)
(8)
定义4中,参考集R可以是type-1、区间型type-2模糊集合。定义5中,参考集R可以是type-1、区间型type-2或者一般型type-2模糊集合。
4 面向后件集的模糊推理
基于相关模糊集合的概念,如果将模糊规则中的后件集作为参考集,则会得到每个前件集的相关模糊集合。在进行模糊推理时,让前件集的相关模糊集合参与推理,而不是前件集直接参与推理,则能将前件集与后件集之间的相关性信息引入到模糊推理过程。下文称这种类型的模糊推理为面向后件集的模糊推理,并分别在2种模糊逻辑系统中进行讨论。由于一般type-2模糊集合的计算复杂性,目前基于type-2模糊逻辑系统的应用都是利用区间型type-2模糊逻辑系统进行建模。
定义6 对于一个基于规则的模糊逻辑系统,在其模糊推理的过程中,如果规则中的每个前件集的相关模糊集合参与模糊推理,则该模糊推理称为面向后件集的模糊推理。其中,规则的后件集作为前件集的参考集。以下2种模糊逻辑系统均具有:p个输入, ;一个输出y∈Y;m条规则,其中第l条规则形为:“IF x1 is
;一个输出y∈Y;m条规则,其中第l条规则形为:“IF x1 is  and
and and xp is
and xp is  , THEN y is Gl”。
, THEN y is Gl”。
1) 设 为type-1模糊逻辑系统中第l条规则的前件集,Gl为后件集;的以Gl为参考集的相关模糊集合为
为type-1模糊逻辑系统中第l条规则的前件集,Gl为后件集;的以Gl为参考集的相关模糊集合为 ,其隶属函数是
,其隶属函数是 。基于type-1模糊逻辑系统的面向后件集的模糊推理(COFR)按以下步骤进行。
。基于type-1模糊逻辑系统的面向后件集的模糊推理(COFR)按以下步骤进行。
步骤1:由式(9)计算激活水平(firing level)。
 (9)
(9)
步骤2:激活水平与后件集Gl进行t-范数运算,得到的模糊集合定义为该规则的输出(rule output或者fired rule)。
2) 设 是区间型type-2模糊逻辑系统第l条规则的前件集,
是区间型type-2模糊逻辑系统第l条规则的前件集, 是后件集。的以为参考集的相关模糊集合是
是后件集。的以为参考集的相关模糊集合是 ,其LMF和UMF为
,其LMF和UMF为 和
和 。基于区间型type-2模糊逻辑系统的面向后件集的模糊按以下步骤进行。
。基于区间型type-2模糊逻辑系统的面向后件集的模糊按以下步骤进行。
步骤1:由下式计算激活区间(firing interval)  。
。
 (10)
(10)
其中: 和
和 分别为激活水平的左端点和右端点。
分别为激活水平的左端点和右端点。
步骤2:和分别与 和
和 进行t-范数运算,结果得到一个FOU,该FOU定义为该规则的rule output(或者称为fired rule)。
进行t-范数运算,结果得到一个FOU,该FOU定义为该规则的rule output(或者称为fired rule)。
定义6中,当相关度分别为清晰数和模糊数时,分别称COFR为具有清晰相关度的面向后件集的模糊推理(COFR with crisp relationship grade,COFR with CRG)和具有模糊相关度的面向后件集的模糊推理(COFR with fuzzy relationship grade,COFR with FRG)。
5 仿真实例
目前几乎所有基于type-2模糊逻辑系统的实际应用都是利用区间型type-2模糊集合进行建模[10-11]。本文也以区间型type-2模糊逻辑系统为例进行仿真说明。实例中使用以下符号: ,
, 和
和 分别表示泥沙少、泥沙中和泥沙多对应的区间型type-2模糊集合;
分别表示泥沙少、泥沙中和泥沙多对应的区间型type-2模糊集合; ,
, 和
和 分别表示油脂少,油脂中,油脂多对应的区间型type-2模糊集合;
分别表示油脂少,油脂中,油脂多对应的区间型type-2模糊集合; ,
, ,
, ,
, 和
和 分别表示时间很短、时间短、时间中、时间长、时间很长所对应的区间型type-2模糊集合;
分别表示时间很短、时间短、时间中、时间长、时间很长所对应的区间型type-2模糊集合; 表示区间型type-2模糊集合的隶属函数。
表示区间型type-2模糊集合的隶属函数。
5.1 实例一(COFR with CRG)
模糊自动洗衣机是模糊逻辑及模糊控制在工业上最成功的应用之一。目前投入实际应用的模糊自动洗衣机中的模糊逻辑及控制系统多采用type-1模糊集合对模糊量进行建模,采用取小和乘积模糊推理的推理方法。目前,对模糊控制理论的应用开发研究仍是研究的热点。本节将提出的区间型type-2模糊逻辑系统及面向后件集的模糊推理方法(COFR)应用于洗衣机的模糊控制,并与在工程领域中得到广泛应用的取小模糊推理和乘积模糊推理比较,以表明COFR的特性。
控制器的输入/输出。控制器有2个输入:衣服上的泥沙量和油脂量。二者可由感光传感器测得。由于只考虑洗涤时间,因此控制器的输入输出设计成双输入单输出的结构。
定义输入/输出变量。 为了使输入变量的值覆盖感光传感器的测量范围,把输入变量的值标准化(normalized)为[0,100]。输入输出变量的隶属函数如图2所示。图2所示为其中1条规则的示意图:泥沙多,油脂中则时间长。其他规则与此类似。
模糊规则。模糊控制器的规则集如表1所示。
模糊推理。为便于比较,首先将泥沙量固定为60,油脂量在5,10和74(小、较小、较大)之间变化,相关结果见表2~4。泥沙量、油脂量及相关度变化时的推理结果见表5~8。当x′=60,y′=5,10,74时,对应的主隶属度分别为J(60)=[0.3,0.5],J(5)=[0.1,0.3],J(10)=[0.2,0.6],J(74)=[0.4,0.7]。x′=60,y′=5和x′=60,y′=10分别激活了4条规则:(2),(3),(5)和(6)。x′=60,y′=74激活另外4条规则:(5),(6),(8)和(9)。限于篇幅,以较复杂的第5和第6条规则进行比较。并设泥沙和油脂对时间的影响度分别是0.3和0.8。此处为了使rule output由所有前件集根据各自的相关度所共同确定,将和对的相关度分别重新设定为 ,
, 。
。
由定义4可得和的以为参考集的相关模糊集合分别为 和
和 ,二者的LMF和UMF分别为
,二者的LMF和UMF分别为 ,
, 和
和 ,
, 。模糊推理的结果(firing intervals,rule outputs,和fired rule)见表2~4。由于
。模糊推理的结果(firing intervals,rule outputs,和fired rule)见表2~4。由于 总小于A(x)∧B(x) (*和∧分别表示乘积和取小t-范数),所以,若COFR优于取小推理,则也必然优于乘积推理。这里的“优劣”指的是模糊推理所得的fired-rule面积的大小,面积越大说明模糊推理捕获到规则中的不确定性信息越多。因此,表2~4没有列出乘积推理的fired-rule示意图。
总小于A(x)∧B(x) (*和∧分别表示乘积和取小t-范数),所以,若COFR优于取小推理,则也必然优于乘积推理。这里的“优劣”指的是模糊推理所得的fired-rule面积的大小,面积越大说明模糊推理捕获到规则中的不确定性信息越多。因此,表2~4没有列出乘积推理的fired-rule示意图。
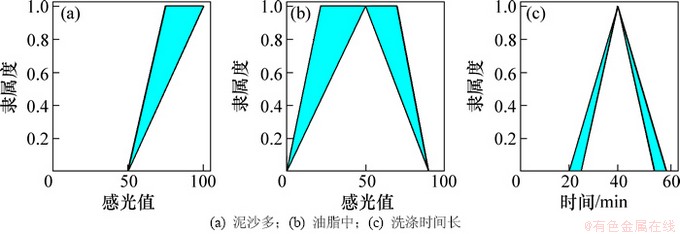
图2 输入/输出变量的FOU
Fig. 2 FOUs of input and output definitions
表1 模糊控制规则集
Table 1 Fuzzy control rules
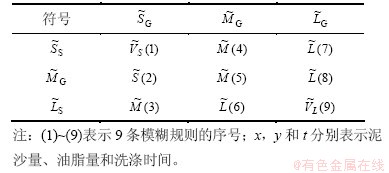
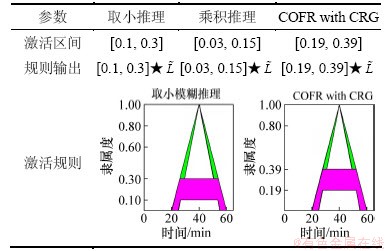
表2 J(60)=[0.3,0.5]和J(5)=[0.1,0.3]时的比较结果
Table 2 Comparisons when J(60)=[0.3,0.5] and J(5)=[0.1,0.3]
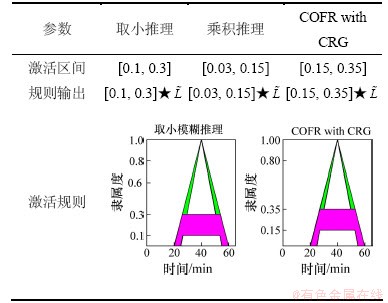
表3 J(60)=[0.3,0.5]和J(5)=[0.2,0.6]时的比较结果
Table 3 Comparisons when J(60)=[0.3,0.5] and J(5)=[0.2,0.6]
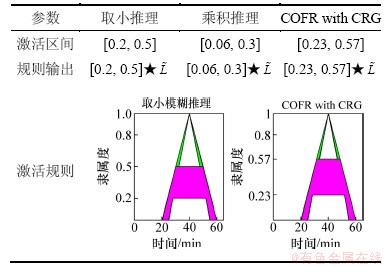
表4 J(60)=[0.3,0.5]和J(74)=[0.4,0.7]时的比较结果
Table 4 Comparisons when J(60)=[0.3,0.5] and J(74)=[0.4,0.7]

由表2可见,当泥沙量远大于油脂量时,取小推理的rule output 仍由油脂量唯一决定([0.1,0.3]★);乘积推理的结果没有反映泥沙含量对时间的影响( );COFR则同时考虑了泥沙和油脂2个因素([0.15,0.35]★),且所得FOU的面积(红色部分,下同)较二者大。左、右2侧FOU的面积分别为7.35和7.38。
);COFR则同时考虑了泥沙和油脂2个因素([0.15,0.35]★),且所得FOU的面积(红色部分,下同)较二者大。左、右2侧FOU的面积分别为7.35和7.38。
由表3可见:当油脂量增大时(仍远小于泥沙量),取小和乘积推理的结果与表2的相似,均由油脂量唯一决定;COFR则不仅完全考虑了泥沙因素 ( ),而且很好地考虑了油脂因素, FOU面积显著增大。
),而且很好地考虑了油脂因素, FOU面积显著增大。
表4表明:当油脂量超过泥沙量时,取小和乘积推理的结果却由泥沙唯一决定,这与实际经验不符;COFR仍兼顾了2种因素,并且FOU的面积明显较大。这是由于考虑了每个前件集对后件集的相关度信息。
表2~4表明:取小和乘积模糊推理得到的Fired Rule有时仅由其中1个前件集决定,而忽略了其他前件集。这会丢失后件集与某些前件集之间的一些信息。表5所示为当r1和r2变化时COFR推理的FOU的面积,此时取小模糊推理所得的面积为4.80。表6所示为当泥沙量和油脂量变化时COFR的推理结果。表7~8所示为第5条规则相应的推理结果。
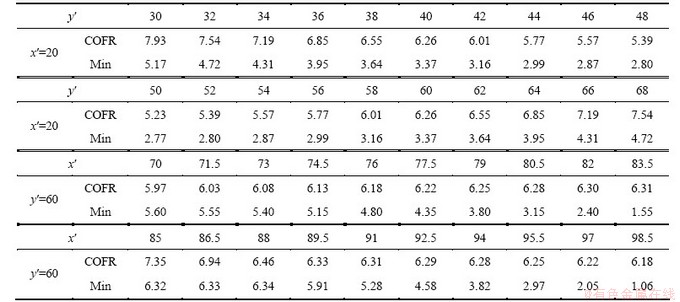
从表2~8可以看出:COFR得到的Fired-Rule的面积大于取小和乘积模糊推理得到的面积,这表明前者比后者能够捕获到规则中更多的不确定性信息。其原因是COFR不仅考虑所有前件集,而且综合考虑了前件集对后件集的相关性信息。
关于降型和清晰化,由上述的模糊推理模块可知:推理引擎的输出集完全反映了COFR与其他模糊推理的区别。而输出模块处理的是推理引擎的输出集,生成降型集和清晰数。而采用不同的降型方法,可得到不同的降型集和清晰数,因此,降型集和清晰数不能反映COFR和其他模糊推理过程的差异。故此处略去降型和清晰化部分。关于降型和清晰化的一些具体方法见文献[1-3,12]。
表5 相关度r1和r2变化时的推理结果
Table 5 Fuzzy inference results when relationship degrees r1 and r2 change within [0,1]

表6 泥沙和油脂量变化时的推理结果
Table 6 Fuzzy inference results when sediment and grease take different values
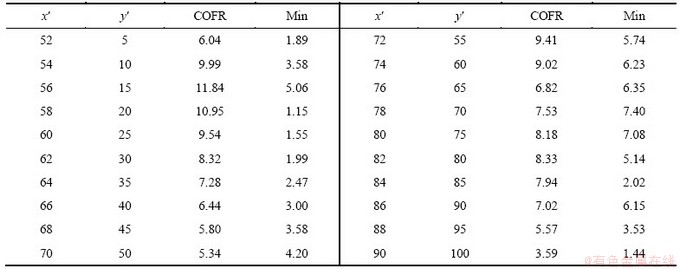
表7 相关度r1和r2变化时的推理结果
Table 7 Fuzzy inference results when the relationship degrees r1 and r2 change within [0, 1]
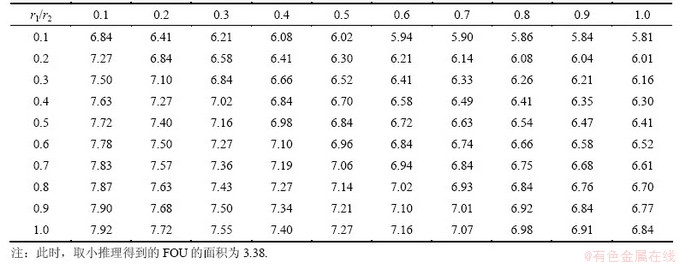
表8 泥沙和油脂量变化时的推理结果
Table 8 Fuzzy inference results when sediment and grease take different values
5.2 实例二(COFR with FRG)
该实例以一个抽象的例子来演示COFR with FRG的实现过程。先做以下设定:1) x1和x2为主变量;2) 区间型type-2模糊逻辑系统中的第l条规则为Rl:IF x1 is and x2 is
and x2 is  , THEN y is ,其中,和的FOU如图2所示;3) 对和对的模糊相关度分别为r1和r2,其隶属函数如式(11)和(12)所示;4) 和的以为参考集的相关区间型模糊集合分别为
, THEN y is ,其中,和的FOU如图2所示;3) 对和对的模糊相关度分别为r1和r2,其隶属函数如式(11)和(12)所示;4) 和的以为参考集的相关区间型模糊集合分别为 和
和 。由定义2和4,并采用质心降型方法[3],可得和的隶属函数,其表达式如式(13-16)所示;5) 在某个特定时刻测得的输入值为60和5,即
。由定义2和4,并采用质心降型方法[3],可得和的隶属函数,其表达式如式(13-16)所示;5) 在某个特定时刻测得的输入值为60和5,即 =60,
=60, =5,对应的主隶属度分别为[0.3,0.5]和[0.1,0.3],即J(60)= [0.3,0.5],J(5)= [0.1,0.3]。
=5,对应的主隶属度分别为[0.3,0.5]和[0.1,0.3],即J(60)= [0.3,0.5],J(5)= [0.1,0.3]。
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
 (15)
(15)
 (16)
(16)
其中: 和
和 ,
, 和
和 分别是和的LMF和UMF。由式(12)可以得到
分别是和的LMF和UMF。由式(12)可以得到 ,
, 。
。
模糊推理。与例1类似,将COFR与取小和乘积模糊推理进行比较。由定义6可得Firing Intervals和Rule Outputs,结果如表9所示。
表9 COFR与取小和乘积模糊推理的比较
Table 9 Comparisons of COFR and minimum and product inferences
由表9可以看到:由COFR with FRG得到的Fired-Rule的面积仍大于取小和乘积模糊推理得到的面积(右图和左图的红色部分面积分别为7.41和7.35)。
6 结论
(1) 引入了模糊集合的相关度,使模糊概念之间彼此相关。并在多个模糊集合相互关联的环境下提出相关型模糊集合的概念,包括相关type-1模糊集合、相关区间型type-2模糊集合以及相关一般型type-2模糊集合。
(2) 在理论上把模糊集合的基本概念和运算性质置于相关型模糊集合的环境下进行讨论,同时得出了其自身特有的一些运算。
(3) 对相关型模糊集合在2种模糊逻辑系统(T1 FLS、IT2 FLS)中的应用进行了研究,提出了面向后件集的模糊推理方法。该方法比传统的模糊推理方法能捕获到规则中更多的不确定性信息。
(4) 模糊集合及模糊逻辑系统的一些概念如质心,降型,相似性和不确定性测度等可以在模糊集合是相互关联的环境下进一步研究。
参考文献:
[1] Greenfield S, Chiclana F, Coupland S, John R I. The collapsing method of defuzzification for discretised interval type-2 fuzzy sets[J]. Information Sciences, 2009, 179(13): 2055-2069.
[2] LIU Feilong. An efficient centroid type-reduction strategy for general type-2 fuzzy logic system[J]. Information Sciences, 2008, 178(9): 2224-2236.
[3] Mendel J M. Advances in type-2 fuzzy sets and systems[J]. Information Sciences, 2007, 177(1): 84-110.
[4] LEE Changshing, WANG Meihui. A fuzzy expert system for diabetes decision support application[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2011, 41(1):139-153.
[5] CHEN Shyiming, LEE Liwei. Fuzzy decision-making based on likelihood-based comparison relations[J]. IEEE Transactions on Fuzzy Systems, 2010, 18(3): 613-628.
[6] Yuksel M E, Basturk A. Application of type-2 fuzzy logic filtering to reduce noise in color images[J]. IEEE Computational Intelligence Magazine, 2012, 7(3): 25-35.
[7] Dombi J. Towards a general class of operators for fuzzy systems[J]. IEEE Transactions on Fuzzy Systems, 2008, 16(2): 477-484.
[8] Seki H, Mizumoto M. Additive fuzzy functional inference methods[C]//2010 IEEE International Conference on Systems Man and Cybernetics, Istanbul Turkey: IEEE, 2010: 4304-4309.
[9] Yubazaki N, Yi J, Hirota K. SIRMs dynamically connected fuzzy inference model and PID controller[C]//The 1998 IEEE International Conference on Fuzzy Systems. Anchorage Alaska: IEEE, 1998: 325-330.
[10] Linda O, Manic M. Uncertainty-robust design of interval type-2 fuzzy logic controller for delta parallel robot[J]. IEEE Transactions on Industrial Informatics, 2011, 7(4): 661-670.
[11] Barkat S,  A, Nouri H. Noninteracting adaptive control of PMSM using interval type-2 fuzzy logic systems[J]. IEEE Transactions on Fuzzy Systems, 2011, 19(5): 925-936.
A, Nouri H. Noninteracting adaptive control of PMSM using interval type-2 fuzzy logic systems[J]. IEEE Transactions on Fuzzy Systems, 2011, 19(5): 925-936.
[12] Greenfield S, Chiclana F, John R, Coupland S. The sampling method of defuzzification for type-2 fuzzy sets: Experimental evaluation[J]. Information Sciences, 2012, 189: 77-92.
(编辑 何运斌)
收稿日期:2013-05-25;修回日期:2013-07-10
基金项目:国家高技术研究发展计划(“863”计划)项目(2009AA04Z132);国家自然科学基金资助项目(71172071,60774088)
通信作者:岳菊梅(1983-),女,河南三门峡人,博士研究生,从事type-2模糊逻辑理论和应用、模糊逻辑在复杂系统中的应用、智能控制方面的研究;电话022-23507780;E-mail:yjm@mail.nankai.edu.cn

