平流层飞艇高度压差协调控制策略
吴雷1, 2,李勇3,李智斌1, 2
(1. 北京控制工程研究所,北京,100190; 2. 空间智能控制技术重点实验室,北京,100190;
3. 中国空间技术研究院,北京,100094)
摘要:通过机理分析,研究影响平流层飞艇压差的主要因素,建立上升过程的压差控制系统模型,并仿真分析各因素对压差影响的程度。基于前面的分析,提出一种以压差控制为主、高度控制为辅的协调控制策略,并进行控制器设计。最后通过仿真验证了所设计控制器的有效性。
关键词:平流层飞艇;高度和压差;协调控制;上升过程
中图分类号:V274 文献标志码:A 文章编号:1672-7207(2011)S1-0327-06
Coordinated control strategy of
pressure difference and height of stratospheric airships
WU Lei1, 2, LI Yong3, LI Zhi-bin1, 2
(1. Beijing Institute of Control Engineering, Beijing 100190, China;
2. Science and Technology Space Intelligence Control Laboratory, Beijing 100190, China;
3. China Academy of Space Technology, Beijing 100094, China)
Abstract: The main factors which affect differential pressure of stratospheric airships are analyzed; a differential pressure control system model of ascending process is established and various factors on the differential impact are analyzed by means of simulation. Secondly, a kind of coordinated control strategy which relies mainly on differential pressure control while altitude control subsidiary is presented. And the controllers based on the strategy are designed. The coordinated control of the pressure difference and altitude is developed, and the performance of the controllers is analyzed by simulation.
Key words: stratospheric airships; pressure difference and altitude; coordinated control; ascending process
平流层飞艇是一种依靠静浮力升空,可长时间驻空的近空间飞行器。从目前相关总体设计[1]来看,平流层飞艇基本以充气软式飞艇设计为主。软式飞艇最大的特点就是需要通过保持一定的内外压差来保证飞艇的几何外形。如果压差过小会使气囊被外部大气压压瘪,导致整体结构变形,迎风阻力激增,受力情况恶化;压差过高会使气囊承受过度张力,气囊气体泄露量增大,气囊结构寿命缩短,甚至使囊体破裂,所以,飞艇的压差控制在飞艇的整个飞行过程中极为重 要[2]。影响飞艇内外压差的因素很多,最主要的是外部大气环境和艇内气体压力的变化。外部大气环境比较复杂,目前的有关文献大多采用通过常年测量的大气环境数据拟合的近似数学模型[3],该模式是与海拔高度有关的分段连续函数;飞艇内部气压与气体质量和体积有关,而气体的质量又是影响飞行高度的主要因素,尤其在飞艇的上升和下降过程。因为飞艇主要通过排出和吸入空气实现飞艇的上升和下降,所以,飞艇的压差控制与飞行高度控制密切相关。目前相关研究还处于起步阶段,大多研究者侧重于单纯飞行性能的研究并不考虑压差的控制,有的则单纯考虑压差控制[4]。Chen等[5]针对飞艇飞行全过程的压差控制进行研究,但其所采用控制策略达到的效果还有待提高。总之,压差控制是软式飞艇必须考虑的问题,尤其与高度控制间的协调控制是使飞艇上升和返回的关键。本文作者通过机理分析,研究飞行状态与压差间的关系,给出影响压差指标的因素,并在此基础上建立飞艇飞行高度压差协调控制的系统模型,并以升空过程为例进行高度压差协调控制策略的控制器初步设计,通过仿真验证了所设计控制器的有效性。
1 问题描述
平流层的高度、压差控制问题集中体现在飞艇的上升和下降过程中。这是因为在这些过程中,无论外部大气环境和飞艇内部气体质量、体积都会发生十分显著的变化。以上升过程为例,20 km高空的大气密度约为海平面时的1/14,大气压强大约为海平面时的1/18。飞艇内部的气体主要由分别独立储存的空气和氦气组成,在一般情况下,氦气不进行排放操作,主要通过排放空气实现飞艇升空。而由海平面到20 km高空时,大约需要排出93%的空气质量,空气和氦气的体积也要相应发生巨大改变。返回过程与此类似。可见,研究上升过程的飞艇高度压差协调控制具有普遍性,可以拓展到其他的飞行过程中。
本文以美国高高空飞艇HAA[6]为研究对象,该飞艇具有双拼椭球体外形,内部有氦气囊和空气囊,腹部有矢量推力螺旋桨,如图1所示。研究其从海平面上升到海拔20km高空的高度压差协调控制问题。

图1 飞艇示意图
Fig.1 Airship sketch
控制目标是实现希望飞艇能够平稳上升到20 km高空,并保持在该高度,且全过程保持艇内外压差在300~500 Pa范围内。主要的控制手段为矢推提供的垂直方向动力和安装在空气囊上的鼓风机和阀门进行空气质量的调节。
由于本文侧重于飞艇高度方向运动与压差间的协调控制研究,所以进行如下简化和假设:
(1) 将飞艇当作质点,只考虑垂直方向运动。
(2) 考虑到飞艇是慢动态系统,近似认为上升过程是热平衡过程,即飞艇内外气体温度相等。
(3) 不考虑风场环境的影响。
2 模型建立
由前面的分析知道,高度压差协调控制与外界大气环境和飞艇高度方向运动密切相关,所以,需要建立相应的数学模型。
2.1 大气环境模型
大气环境随着高度的不同,大气温度、压强和密度都发生变化。本文采用的大气密度和温度变化模型如下式所示:

其中:h为高度(m);ρ和T分别为在高度h处的大气密度(kg/m3)和温度(K); 和dT分别为常数,取值为:
和dT分别为常数,取值为: =1.225 kg/m3;
=1.225 kg/m3; =0.363 91 kg/m3;T0=288.15 K;dT=-0.006 5 K。
=0.363 91 kg/m3;T0=288.15 K;dT=-0.006 5 K。
大气压强的模型可以通过理想气体状态方程 求出:

其中:Rair为空气气体常数。
2.2 飞艇动力学模型
本文只研究飞艇高度方向运动,即只需建立高度方向的质点动力学模型。
首先进行飞艇飞行高度方向受力分析(不考虑水平方向风引起的气动力)。
静浮力:
重力:
阻力:
净浮力:
推力: 。
。
其中:ρ为大气密度;g为重力加速度;V为飞艇体积; 和ms分别为飞艇内部氦气、空气和飞艇结构质量;u为飞艇上升速度;Cd为阻力系数。则飞艇高度方向的动力学模型为:
和ms分别为飞艇内部氦气、空气和飞艇结构质量;u为飞艇上升速度;Cd为阻力系数。则飞艇高度方向的动力学模型为:

其中: 为飞艇总质量。
为飞艇总质量。
2.3 执行机构模型
执行机构包括矢量推力螺旋桨和阀门。
矢量推力螺旋桨可以连续提供垂直方向、范围在±1.960 kN内的推力。
所用阀门指标为:阀门直径fd=600 mm,开度fa=100 mm,流阻C=0.5。
单个阀门流量计算公式为: ,采用20个阀门。
,采用20个阀门。
3 机理分析
通过机理分析,研究高度方向上飞艇的运动与压差间的关系,为控制系统设计打下基础。下面就飞艇不同状态进行研究。
3.1 飞艇处于静稳定状态
当飞艇处于静稳定状态时,因为:
 故有
故有

 。
。
其中: 和Vhe表示氦气的质量、密度和体积;
和Vhe表示氦气的质量、密度和体积; 和Vair表示空气的质量、密度和体积。
和Vair表示空气的质量、密度和体积。
代入式(6)得到:

由理想气体状态方程知:
 ,
,
 ,
,
 。
。
其中: 。所以有:
。所以有:


可见:此时飞艇的压差只由氦气质量、固定质量、飞艇体积和所处环境温度决定,也就是说,飞艇设计好后,其压差就成为一个能反映飞艇的特性特征参数。此外,在一般情况下,氦气质量和飞艇体积认为是常量,则压差的变化只与T有关,定义这一项为飞艇的稳态压差?p0。
以高高空飞艇HAA为研究对象,进行仿真计算。
HAA从海平面到20 km高度时飞艇的稳态压差曲线如图2所示。由图2可见:压差最大值为在海平面时的488.5 Pa;最小值为11~20 km段的367.3 Pa。可见:此部分的变化规律与大气温度的变化规律一致。也就是说,飞艇静稳定状态的压差与飞行高度有一个自然的变化关系,压差变化的范围取决于飞艇初始高度和目标高度之差。

图2 稳态压差与飞行高度关系图
Fig.2 Relationship between steady pressure difference and altitude
3.2 飞艇匀速上升
假设飞艇具有一初始速度,且仅由静浮力调节来平衡重力和阻力,则有:




定义 为速度压差,则有:
为速度压差,则有:

通过仿真,在海平面和在20 km处时u与?p的关系如图3和图4所示。

图3 海平面时速度与压差关系
Fig.3 Relationship between pressure difference and velocity at sea level

图4 20 km时速度与压差关系
Fig.4 Relationship between pressure difference and velocity at 20 km altitude
可见:随着高度的增高,飞艇通过自身静浮力调节能够跟踪的上升速度也越大,但这是以损失压差为代价的。但在低空时,速度的大幅变化会导致压差超出允许范围发生飞行安全事件,所以在低空阶段压严格控制飞行速度。
3.3 一般情况
考虑推力后有:



定义推力压差为 ;加速度压差为
;加速度压差为 ,则有:
,则有:

通过简单计算可以知道:推力压差和加速的压差对压差影响相对于稳态压差和速度压差产生的影响小得多。
可见:影响压差的因素有大气环境、上升速度、加速度,飞艇质量和推力等,其中推力和飞艇质量的调节为主动控制手段。
4 控制器设计
4.1 控制策略
由前面的机理分析可知压差与飞艇飞行状态间的关系,压差与飞行高度、速度和加速度间是非线性且互相耦合的关系。其中稳态压差主要由外界环境温度变化决定,速度压差项对压差影响最大,尤其在低空阶段,上升速度超过2.8 m/s就会使压差超出允许范围。由于压差控制是保证飞行安全的最高优先级的控制策略,所以,在制定控制策略时需要以牺牲飞行动态性能来满足压差控制。
本文中采用的执行机构中推力装置可连续输出有界控制量,而阀门只能提高开关控制量,且压差控制为范围控制。所以,一种简单有效的控制策略就是以压差控制为主,在满足压差范围前提下,通过PD反馈控制驱动推力装置提高飞艇动态性能。
基于上面分析,本文所采用的控制策略如下:飞艇的起飞采用静轻方式起飞,即在地面时飞艇所受浮力大于自身重力,通过压舱物或系留方式稳定在放飞场;放飞时,解除系留或卸下压舱物使得飞艇获得初始上升动力,并启动螺旋桨产生向上的推力使飞艇升空。需注意的是:此时假定飞艇通过系留已经保持迎风状态。飞艇在初始净浮力和矢量推力装置作用下开始升空,压差控制系统根据内囊压力情况打开气阀以保持气囊压力在规定范围内。
在上升过程中,为了快速通过对流层,需要充分发挥矢推的作用;此外,通过阀门排放空气囊内的空气,完成飞艇的保形稳压作用,与螺旋桨一起完成升空任务。
当飞艇接近目标高度时,为减少超调和能源消耗,此时关闭矢推,通过阀门和风机完成最后的高度控制。
4.2 控制器设计
高度控制器采用PD控制,以位置误差及其导数为反馈量进行控制器设计有:

其中:kp和kd为比例和微分控制参数;href为目标高度。压差控制器为如图5所示的开关控制器。

图5 阀门控制器逻辑图
Fig.5 Logic diagram of valve controller
5 仿真分析
基于前面控制策略所设计的控制器,在MATLAB环境下进行编程仿真。飞艇参数与HAA的相同,压差范围设定为300~500 Pa。飞艇初始条件为:高度为 0 m,垂直方向速度为0 m/s,初始净浮力为5 kN,内外压差为305 Pa。
位置控制器参数选取如下:

仿真结果如图6~10所示。

图6 飞行高度曲线
Fig.6 Curve of flight latitude

图7 压差曲线
Fig.7 Curve of pressure difference

图8 速度曲线
Fig.8 Curve of velocity
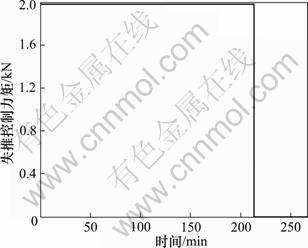
图9 推力曲线
Fig.9 Curve of pressure trust

图10 排出气体质量曲线
Fig.10 Curve of air mass ejected
从仿真结果可以看出:飞艇在250 min左右到达目标高度,并能够快速稳定,全过程艇内外压差都控制在规定范围内。可以验证所设计控制器是行之有效的。
6 结论
(1) 影响压差的主要因素是稳态压差,它取决于艇内气体温度。高度方向速度引起的速度压差对压差影响较大,尤其在低空阶段,速度大范围变化会影响飞行安全。有限推力引起的推力压差和加速度压差的影响相对较小。
(2) 飞艇的高度压差协调控制应以压差控制为首要满足的条件,在此基础上进行飞行动态性能的调节。
(3) 以飞行高度为反馈信息的PD控制器结合压差开关控制器能够满足高度与压差的协调控制。
总之,平流层飞艇的压差控制与其高度控制密切相关。本文对飞艇模型进行了简化和必要的假设,虽然所设计控制器满足控制目标,但对于动态性能的调节能力十分有限,这不仅受限于执行机构的能力范围,也是所制定控制策略决定的。如何在现有执行机构基础上优化动态性能将是下一阶段的研究重点。此外,如果再考虑风场环境、飞艇姿态变化和热效应对压差的影响,压差控制系统将是一个非常复杂的强耦合、强非线性系统,这也就对飞艇压差控制策略提出了更高的要求。
参考文献:
[1] Khoury G A, Gillett J D. Airship technology[M]. Cambridge: Cambridge University Press, 1999: 9-11.
[2] Colozza A, Dolce J L. High-altitude long endurance airship for coastal surveillance [R]. Springfield: NASA Grenn Research Center, 2005: 7-8.
[3] 姚伟, 李勇, 王文隽, 等. 平流层飞艇热力学模型和上升过程仿真分析[J]. 宇航学报, 2007, 28(3): 603-607.
YAO Wei, LI Yong, WANG Wen-jun, et al. Thermodynamic model and numerical simulation of a stratospheric airship take-off process[J]. Journal of Astronautics, 2007, 28(3): 603-607.
[4] 曹毅, 罗传勇, 罗义平, 等. 小型验证飞艇气体压力控制系统设计[J]. 光电与控制, 2007, 14(4): 180-186.
CAO Yi, LUO Chuan-yong, LUO Yi-ping. et al. Design of gas pressure control system for small verifying airship[J]. Electronics Optics & Control, 2007, 14(4): 180-186.
[5] CHEN Xing-jun, QI Huan, WANG Xiao-ping, et al. Modeling and simulation of pressure control for stratospheric platform airship[C]//Proceedings of the 6th World Congress on Intelligent Control and Automation. Dalian, 2006: 6208-6212.
[6] Joseph B, Michael A, ZHAO Yi-yuan. Development of an aerodynamic model and control law design for a high altitude airship[C]//AIAA 3rd "Unmanned Unlimited" Technical Conference. Chicago, 2004: 6481-6485.
(编辑 杨幼平)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(11072028)
通信作者:吴雷(1978-),男,黑龙江哈尔滨人,博士研究生,从事平流层飞艇放飞返回过程自主飞行控制研究;电话:13671232550;E-mail:wulei0451@163.com

