
DOI�� 10.11817/j.issn.1672-7207.2020.04.009
���ڱ����ĸ߶Ȳ��Ե�˫������˱䲽����̬�滮
�ܽ��,Ф����
���人��ѧ �������еѧԺ������ �人��430072��
ժҪ:���˫������˱䲽�������������һ�ֻ��ڱ����ĸ߶Ȳ��Եı䲽����̬���ɷ��������ȣ�ͨ�����ۼ���������ʵ�飬�ó���ͬ���������²�ͬ������Ӧ�Ļ������ܺ���͵����ĸ߶ȣ���Ϊ��߶ȹ��������ĸ߶ȵIJο�ֵ����Σ�����ģ��Ԥ�����(MPC)��������״̬���̣������ۺ�����λ�켣���ٶ��Ż�����ŵ���Ƶ��Ż�Ŀ�꺯�������������ص�(ZMP)�ȶ�ԣ��Լ������������Լ�����ι滮ģ��(QCQP)�������������Ĺ켣�������NAO������Ϊʵ��ƽ̨���б䲽�����жԱ�ʵ�顣�о��������������ģ��Ԥ����Ʒ����������˲��й�����ZMPʼ�ձ������ȶ���Χ�ڣ�ʵ�����ȶ����У����ڱ����ĸ߶ȵIJ�̬���ɲ��ԣ����ݲ����仯�������������ĸ߶ȣ�����Ӧ0.04~0.10 m�䲽�����У�����ڶ��߶����Ե�����ģ�;��и�ǿ�IJ��������������������Ƶı䲽�����У����ڱ����ĸ߶ȵı䲽����������ڴ�ͳ�㶨���ĸ߶ȷ���ƽ���ܺĽ���Լ16%��
�ؼ���:�����ĸ߶ȣ��䲽����ģ��Ԥ����ƣ�����Ч�ʣ�˫�㲽��
��ͼ�����:TP242 ���ױ�־��:A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±��:1672-7207��2020��04-0944-09
Walking gaits planning with variable footstep length of biped robot based on variable center-of-mass height
ZHOU��Jiangchen, XIAO��Xiaohui
(School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
Abstract: To deal with the biped walking with variable step-length of humanoid robot, a gaits generation method was proposed based on variable center-of-mass(COM) height strategy to achieve variable step-length walking. Firstly, the energy efficient COM height corresponding to the step-length was carried out through the theoretical calculation combined with experiments and then the COM height was adopted as the reference value. Then, the COM state model was established based on model predictive control(MPC), and the cost function was proposed, where the COM trajectory generation, velocity optimization and footstep locations adjustment were incorporated. Considering the zero moment point(ZMP) stability constraints, a quadratically constrained quadratic program(QCQP) was modeled to generate optimal COM reference trajectory. Finally, the variable step-length walking experiment was carried out on the NAO robot. The results show that the ZMP strictly keeps in the constrained area so that the robot can achieve stable biped walking based on MPC. The strategy based on variable COM height can adjust COM height according to step-length and can adapt to the range of 0.04��0.10 m, resulting in stronger step-length adjustment ability. The energy of the variable step-length warking gaits based on proposed strategy reduces by 16% compared to traditional method based on 3D LIPM at constant height.
Key words: variable center-of-mass height; variable step-length; model predictive control; energy efficiency; bipedal walking
˫�㲽�л���������Ӧ���ӻ��������и߶ȵ�����Ժ��˶���������Ұ��̽�⡢��ͥ���������������Ź�����Ӧ��ǰ��[1]��Ϊ���˫��������ڸ��ӻ����µ��˶�������һ���棬������Ӧ�߱�ͨ��������������Խ�����ϰ��������������ɲ���ģʽʱҪ���ǻ����˲���������������һ���棬Ҫ���DZ䲽�����й����л����˵�����Ч�ʡ���Ա䲽�����У��ڶ�ѧ�߲ο�ZMP�켣���ɲ�̬��ͨ������ZMP�켣��ʵ��Ŀ���˶�[2-3]��KAJITA��[4]���һ�����Ե�����ģ���ٿ�������ͨ���������Ĺ켣����СZMP����˧��[5]ͨ������������ʱ�䣬ʵ�ֻ��������Ĺ켣ƽ�ȹ��ɲ�ʵ�ֱ䲽�����У���������[6]����ʱ�䲹�����ؽ����ؿ��Ƶ���ZMP���ڲ����仯ʱ����������������״̬����֤�ȶ����С����ͬʱ��Ҳ�в����о���Ա�о����ಽ��ԭ������������ȷ���˶�ģ�ͻ��߲��÷���ѧԭ����ʵ��˫�㲽�С�AFTAB��[7]���÷��ֵ�����ģ��(inverted pendulum plus flywheel model, IPFM)��ͨ������ת��������ZMP�Կ�����ŵ㣻KUDOH��[8]ͨ�������ද������������ԡ����⣬һЩ�������ܿ��Ƶķ���Ҳ�õ��㷺���ã������ɵ�[9]ͨ������ѧϰ������������ŵ���������̬ģ�ͣ�ʵ����ŵ������ZHONG��[10]������������ģ����������ʵ�ָ��ӵ����»������˶����ơ��������������������ں㶨�߶ȵ�LIPM����Ϊ�������ڲ��й��������ĸ߶ȱ��ֲ��䣬�����ɸ߶ȱ仯�����ĸ��ӷ��������⡣�����˶�ѧԼ�������ĸ߶������˻����˵IJ����仯��Χ���ڵ����������ϴ�ı�ʱ�����˶�ѧ���ó���Ч�⣻ͬʱ����������������ĸ߶ȶԻ����˵�Ӱ�졣���������ܿ��Ƶķ�����Ҫһ����ѵ��ʱ�䣬�Ի�����Ӧ���ϲ�о����������ಽ�й��������ɸ߶Ȳ����̶��Ҳ�ͬ�����¾��ж�����̬����ʵ�ָ�Ч�ȶ�����[11]��ͬʱ����ZMP�ȶ�ԣ���ڣ�ͨ���������������Ե�����ģ�߶ȿ��Խ��ͻ������ܺ�[12]�����ڴˣ����˻��������ߵĸ߶ȵ�������Ҳ�����о��߹�ע��һ���棬�߶ȱ仯�������ӷ��������⣬��ͳ���ڲο�ZMP�켣�IJ���ģʽ�������������ѣ���һ���棬��ʵʱ������ŵ�ʱ��Ϊ����ȶ��ԣ����뿼�ǻ��������ٵĽṹ�ߴ���ȶ�ԣ�ȵȶ���Լ����ģ��Ԥ�����(model predictive control, MPC)�ܽ�������Զ�Լ���Ż����⡣Ŀǰ���Ѿ���ѧ����MPCʵ����ŵ����[13]��������Żָ�[14]�ͻ���������̨��[15]������Щ����û�й�ע���䲽�����������ĸ߶ȵĵ�����Ϊ�ˣ�������Է��˻����˱䲽�����������ڴ�ͳ���Ե����ڲ�̬�滮���������ĸ߶ȶԲ����ɱ䷶Χ�����ƣ�ͬʱ���ǵ�����ģ�����ĸ߶ȶԲ�������Ч�ʵ�Ӱ�죬����߶ȱ仯�����һ�ֻ���MPC�ı����ĸ߶ȵIJ�̬���ɷ������÷������ڱ����ĸ߶Ȳ������ɱ䲽����̬�������������˶�ѧԼ�����µĹ̶����ĸ߶ȶԲ����ɵ���Χ�����ƣ�ͬʱ�����ǵ����ĸ߶ȶԲ����ܺĵ�Ӱ�죬�Բ�ͬ�������ܺ���͵����ĸ߶�Ϊ�ο���ͨ���������ĸ߶�����߱䲽����������Ч�ʡ�
1 ˫������˽��ܲ���
1.1��˫�㲽�в�̬����
��LIPM��˫�㲽̬���ɹ����У��������˼�Ϊ1����ά������ģ�ͣ�˫�㲽��ģʽ�ɲ��в������ɲο�ZMP�켣��ZMP�켣ͨ��LIPM�������Ĺ켣���������˶�ѧ������ؽڽǶȣ�����˫�㲽�в�̬����������ͼ1��ʾ��

ͼ1������LIPM����˫�㲽�в�̬����
Fig. 1��Biped walking gait generation process based on LIPM
Ϊ���������ĸ߶ȱ仯�����ķ��������⣬���Ե�����ģ�ͽ�����ά���ں㶨�߶�[2]��Ȼ�������Ĵ�ֱ״̬��Ӱ������˵�ƽ������������Ч�ʣ����統���ĸ߶Ƚϵ�ʱ������ƽ�⣬���и��ߵ�³���ԣ������������Ͽ��Զ��ݵ����³����[16]���������˶�ά���ں㶨�߶ȣ����²�̬����Ȼ��ͬʱ������ϥ�ؽ����غ��ٶȣ�����������Ч��[11]��
1.2���ܺ�������ĸ߶�
Ϊ��֤���ĸ߶ȶ�����Ч�ʵ�Ӱ�죬ͬʱ���ǵ������˱䲽������������Aldebaran Robotics��˾��Ƶ�NAOH25�ͻ�����Ϊʵ��ƽ̨�����ȶ���ǰ���£��о���ͬ�������й�������Ч�������ĸ߶ȡ�
�������ۼ����ʵ����֤���ϵķ��������ȣ����㲽���ܺģ�ȷ���ܺ�������ĸ߶ȣ�Ȼ��ͨ������ʵ�����������
��NAOH25���˻�����Ϊƽ̨���ص��о���������֫�˶���ͼ2��ʾΪ���IJ��õĸ�ʽģ�͡���ͼ2�ɼ�������������Ϊ������������ɣ�ÿ�����˹̶�1���ֲ�����ϵ����������������10�����ɶ�����ģ�ͣ���w��ʾ�̶��ڵ����ϵ�ȫ������ϵ����b��ʾ�������������ĵľֲ�����ϵ���Ի�������ǰΪȫ������ϵx�᷽������Ϊȫ��y�᷽����ֱ����Ϊȫ��z�᷽��
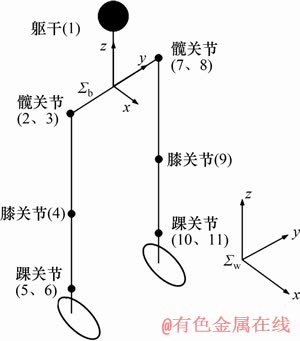
ͼ2������������ģ��
Fig. 2��Linkage model of robots
����Ŀǰû������ȷ�����������������ĵı���ʽ�����ԣ�ͨ�õ�����ָ���Ǽ��������10���ؽ��ܺ���͡�����Ҫ����Ҫ�����������蹦�ʣ�
 (1)
(1)
ʽ�У� Ϊ��i�����˹ؽڹ��ʣ�
Ϊ��i�����˹ؽڹ��ʣ� ��
�� �ֱ�Ϊ��i�����˹ؽ����غͽ��ٶȡ�
�ֱ�Ϊ��i�����˹ؽ����غͽ��ٶȡ�
��������ZMP�̶���֧�������ģ������ζ���ʽ�滮�㲿�ڶ��켣������˫�㲽̬[17]���ó�ʽ(1)�и��ؽڽ��ٶȣ�Ȼ����ţ��-ŷ�����̣��Ӱڶ���ĩ����֧�������μ��������ڸ������ϵ��������أ����涯��ѧ��ͨ������������ؽ����أ������ܺ�[18]��
��ţ��-ŷ��������ͼ2�е�i�����˵Ķ���ѧ����Ϊ
 (2)
(2)
ʽ�У� ��
�� �ֱ�Ϊ���˺Ͷ�Ӧ�ؽ��������������أ���ֵ����
�ֱ�Ϊ���˺Ͷ�Ӧ�ؽ��������������أ���ֵ���� ��
�� Ϊ0��
Ϊ0�� ��
�� �ֱ�Ϊ�������ļ��ٶȺؽڽ��ٶȣ�
�ֱ�Ϊ�������ļ��ٶȺؽڽ��ٶȣ� Ϊ���˹���������
Ϊ���˹��������� Ϊ��ת����
Ϊ��ת���� Ϊ��
Ϊ�� ����ϵԭ�㵽��������λ��ʸ����
����ϵԭ�㵽��������λ��ʸ����
����������ؽ����أ�����ʽ(1)�����ۼ���˫�㲽���ܺģ��ı䵹����ģ�����ĸ߶ȣ����ɵó���ͬ�߶��²��������ܺģ�����������Ÿ߶ȡ�����ģ����Χ���������Ÿ߶�ѡȡ��������߶Ƚ�������ʵ�顣����NAO�����˲��߱��ؽ�Ť�ز�����������������õ���������������������[3]����ʵ������У����ֻ�������֫���йؽ���������������֫�˶��ؽ���ƽ�������������������ܺġ�
�Բ���ȡ0.060 mΪ�������ۼ����ܺ�������ĸ߶�Ϊ0.318 m�������ڸ߶ȷֱ�ѡȡ0.310��0.314��0.315��0.316��0.318��0.319 m���в���ʵ�飬��������Ϊ1.0 s��������ʱ��ռ80%��ÿ�ν���10�����ڵĶ��������У���֤ÿ��ʵ����ͬ���ĵ��滷������ɡ������˹ؽ�ƽ�����������ͼ3��ʾ����ͼ3�ɼ��������������в�ͬ���ĸ߶����ܺIJ�ͬ������ʵ���У�0.060 m�������ܺ�������ĸ߶�Ϊ0.315 m��
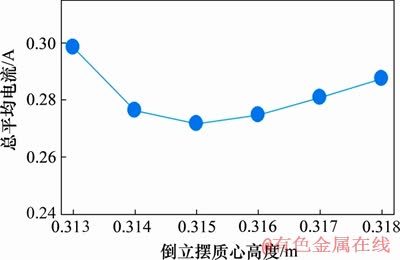
ͼ3�������˹ؽ�ƽ������
Fig. 3��Average current of robot joint
ͨ������ʵ�飬�ó���������Ϊ1.0 sʱ6�ֲ�ͬ�������ܺ����ʱ���������ĸ߶ȣ�������1��ʾ��
��1����ͬ�������������ĸ߶�
Table 1��Optimal COM height for variable step-length

2 ����MPC�����Ĺ켣
2.1������״̬����
�������������ڹ̶��߶ȵ�˫�㲽���ڸ��ӻ����о߱��ϲ�ı䲽���������������������ڲ�ͬ�����¾��в�ͬ���ܺ���͵����ĸ߶ȡ���ˣ����DZ����ĸ߶�����µı䲽����̬���ɡ���ģ��Ԥ����Ƽ����ڲ��л����˵������˶��ϣ����Ǹ߶ȱ仯�����ĵ�״̬ʹ��3������ �����壬�ֱ��ʾ������ǰ����ʹ�ֱ�����λ�á�
�����壬�ֱ��ʾ������ǰ����ʹ�ֱ�����λ�á�
����MPC���ۣ�������ǰ�������ֱ����λ�õ�������Ϊ�������벢������ÿ������ʱ���� �ڵĿ������뱣�ֺ㶨������1������ʱ������λ��Ϊ��������ڵ�
�ڵĿ������뱣�ֺ㶨������1������ʱ������λ��Ϊ��������ڵ� ������ʱ�̣�ϵͳ״̬�������£�
������ʱ�̣�ϵͳ״̬�������£�
 (3)
(3)
ʽ�У� Ϊ��ǰʱ��ϵͳ״̬ʸ���������ĵ�λ�á��ٶȺͼ��ٶȹ��ɣ����У�
Ϊ��ǰʱ��ϵͳ״̬ʸ���������ĵ�λ�á��ٶȺͼ��ٶȹ��ɣ����У� ��
�� ΪԤ�������Ϊ��һ��ʱ��Ԥ�������״̬����ϵ������A��B�ֱ�Ϊ
ΪԤ�������Ϊ��һ��ʱ��Ԥ�������״̬����ϵ������A��B�ֱ�Ϊ
 (4)
(4)
��������ģ�ͣ�������ǰ״̬����Ԥ���� (����δ��
(����δ�� ������ʱ��)������λ��״̬����
������ʱ��)������λ��״̬���� ��Ԥ��ʱ���ڲ����ٶ�״̬����
��Ԥ��ʱ���ڲ����ٶ�״̬���� �ͼ��ٶ�״̬����
�ͼ��ٶ�״̬���� ����������ʽ��ʾ��
����������ʽ��ʾ��


 (5)
(5)
ʽ�У� ��ʽ(5)�У���ϵ������
��ʽ(5)�У���ϵ������ ��
�� ����ʽ(4)�������㡣��
����ʽ(4)�������㡣�� ��
�� ����
����
 (6)
(6)
 (7)
(7)
ʽ�У� Ϊλ��״̬ѡ���������״̬ʸ����ȡ��λ�÷���(
Ϊλ��״̬ѡ���������״̬ʸ����ȡ��λ�÷���( )��ͬ����
)��ͬ���� ��
�� ��
��
2.2���Ż�Ŀ�꺯��
MPC�ĺ���������ͨ�������Ż�Ŀ�꺯���Ϳ�����õ��ȶ�״̬����������������ο����㲿��ŵ�λ�úͲ�������(�����У�������ʱ��Ϊ��ֵ)�����Ż�Ŀ������������ˮƽλ�ø������ο��߶ȸ��������㲿��ŵ�λ�������⣬���ǻ����������������������ٶȺ�����ͷ������գ����������Ż�Ŀ�꺯�� ��
��


 (8)
(8)
ʽ�У� ��
�� ��
�� ��
�� �ֱ�Ϊλ�ø��ٳͷ�ϵ�����ٶȳͷ�ϵ������������ͷ�ϵ�����㲿��ŵ���ٳͷ�ϵ��(Ϊ��֤Hessian���������ԣ�����ϵ��������Ϊ����0)��
�ֱ�Ϊλ�ø��ٳͷ�ϵ�����ٶȳͷ�ϵ������������ͷ�ϵ�����㲿��ŵ���ٳͷ�ϵ��(Ϊ��֤Hessian���������ԣ�����ϵ��������Ϊ����0)�� ΪԤ��ʱ���������ڵ���ͶӰλ�ú߶ȵIJο�ֵ��
ΪԤ��ʱ���������ڵ���ͶӰλ�ú߶ȵIJο�ֵ�� ��
�� �ֱ�ΪԤ��ʱ�������õ�δ��
�ֱ�ΪԤ��ʱ�������õ�δ�� ����������(����ǰ֧��������)��ʵ����ŵ�Ͳο���ŵ�λ��(
����������(����ǰ֧��������)��ʵ����ŵ�Ͳο���ŵ�λ��( )��
)�� ΪԤ��ʱ����δ������������ǰ��Ͳ����㲿��ŵ�λ�ã���Ե�k������ʱ�̣���
ΪԤ��ʱ����δ������������ǰ��Ͳ����㲿��ŵ�λ�ã���Ե�k������ʱ�̣��� ��
��
ʽ(8)�У�����ʸ�� Ϊ
Ϊ
 (9)
(9)
���������Ŀ�꺯����ע��λ�ø��٣��Ӷ���֤�������ܹ��ڱ䲽�������и���Ԥ���㲿��ŵ㡣������[16]��ͬ�����Ŀ��ǵ�������ģ�߶ȵ�Ӱ�죬�����ĸ߶ȵIJο�ֵ�������ã���ο��߶���Ԥ�����ڲ�����������ݱ�1�в�ͬ�������ܺ���͵����ĸ߶ȣ�ʵ�����ĸ߶ȿɵ��ı䲽�����С�
2.3��Լ��ģ��
Ϊ��֤�ȶ����У���Ҫ����ZMP�ȶ���Լ�����߶ȸı�ʱ����ǰ���˶�Ϊ������
 (10)
(10)
ʽ�У� ΪZMP���x����(ǰ���˶�)������
ΪZMP���x����(ǰ���˶�)������ Ϊ�������ٶȡ�����ZMP�ȶ������ۣ������������߹�����Ӧ�ñ�֤ZMP���㲿֧�Ŷ������[2]�����ڵ���֧�Ž�֧�Ŷ�����ȶ�������С������˫��֧�Ź���ZMP�ȶ�ԣ�Ƚϴʱ���ֻ���ǵ���֧�Ž��Լ�Լ����ʽ����Ԥ��ʱ����ZMPλ��Ӧ����������Լ����
Ϊ�������ٶȡ�����ZMP�ȶ������ۣ������������߹�����Ӧ�ñ�֤ZMP���㲿֧�Ŷ������[2]�����ڵ���֧�Ž�֧�Ŷ�����ȶ�������С������˫��֧�Ź���ZMP�ȶ�ԣ�Ƚϴʱ���ֻ���ǵ���֧�Ž��Լ�Լ����ʽ����Ԥ��ʱ����ZMPλ��Ӧ����������Լ����
 (11)
(11)
ʽ�У� (
( )Ϊ����ʱ�������в���ʱ�̶�Ӧ��ʵ��ZMP����ȫ������ϵ��x��λ�ã���ǰ��λ�ã�
)Ϊ����ʱ�������в���ʱ�̶�Ӧ��ʵ��ZMP����ȫ������ϵ��x��λ�ã���ǰ��λ�ã� Ϊʵ��ZMP����ȫ������ϵ��y��λ�ã�������λ�ã�
Ϊʵ��ZMP����ȫ������ϵ��y��λ�ã�������λ�ã�
 Ϊ����ʱ�������в���ʱ�̶�Ӧ���㲿�������(��ŵ�)��ΪԤ��ʱ���ڲ���������
Ϊ����ʱ�������в���ʱ�̶�Ӧ���㲿�������(��ŵ�)��ΪԤ��ʱ���ڲ��������� ��
�� �ֱ�Ϊx������ZMP������㲿�����±߽���ϱ߽磬�ɻ������㲿�ߴ������
�ֱ�Ϊx������ZMP������㲿�����±߽���ϱ߽磬�ɻ������㲿�ߴ������ ��
�� �ֱ�Ϊy������ZMP������㲿�����±߽���ϱ߽磬�ɻ������㲿�ߴ��������ZMP�ϱ߽�Ϊ����ʽ(11)��ZMPԼ���������£�
�ֱ�Ϊy������ZMP������㲿�����±߽���ϱ߽磬�ɻ������㲿�ߴ��������ZMP�ϱ߽�Ϊ����ʽ(11)��ZMPԼ���������£�

 (12)
(12)
2.4���ο��켣
��ʽ(8)�У���Ҫ����Ԥ��ʱ�����㲿�ο���ŵ㡢���ĵ���ͶӰ�ο�λ�ú����IJο��߶ȡ���ͬ���ڵ��㲿��ŵ����ͨ��Ԥ��ָ���ο������Ͳ����Ȳ�������������ʵ�ʻ����˶��ԣ���ǰ�����µ�֧�Ž�Ӧ���ֲ�������ˣ�������Ҫ����ǰ�����㲿��ŵ��Ԥ��ָ����δ��������ŵ�ӳ�������Ԥ��ʱ��IJο���ŵ㡣
�ڹ����Ż������У�Ԥ��ʱ��ʼ�IJ���ʱ�����ڵ�ǰ��ʼ���ڣ���ŵ�λ�ò����ƶ�����Ԥ��ʱ����δ�� ����ŵ�λ��ͨ���Ż��������е�����Ԥ��ʱ���ڲο��㲿��ŵ�(��ǰ����ŵ�Ϊ��)������ʽ���㣺
����ŵ�λ��ͨ���Ż��������е�����Ԥ��ʱ���ڲο��㲿��ŵ�(��ǰ����ŵ�Ϊ��)������ʽ���㣺
 (13)
(13)
ʽ�У� Ϊ��ǰ����ʱ�������в���ʱ�̶�Ӧ���㲿�ο���ŵ���ɵ�ʸ����
Ϊ��ǰ����ʱ�������в���ʱ�̶�Ӧ���㲿�ο���ŵ���ɵ�ʸ���� ΪԤ��ʱ�������в���ʱ�̶�Ӧ���㲿��ŵ㣻
ΪԤ��ʱ�������в���ʱ�̶�Ӧ���㲿��ŵ㣻 Ϊ��k������ʱ�̶�Ӧ�ĵ�ǰ���ڵ�ʵ���㲿��ŵ㣻
Ϊ��k������ʱ�̶�Ӧ�ĵ�ǰ���ڵ�ʵ���㲿��ŵ㣻 ��
�� �ֱ�Ϊ��ǰ���ں�Ԥ��ʱ����δ�������㲿��ŵ�ӳ�������RΪ��Ȼ�����ϡ�
�ֱ�Ϊ��ǰ���ں�Ԥ��ʱ����δ�������㲿��ŵ�ӳ�������RΪ��Ȼ�����ϡ�
��Բο�����λ�ã������ڵ����ͶӰλ�ù�����ÿ�����ڵ�֧�Ž�����λ��(���������ڵ���ŵ�)����ǰ���˶�Ϊ������Ԥ��ʱ���ڵ�k�����������IJο�λ�� Ϊ
Ϊ
 (14)
(14)
���Ĺ�ע�ڱ䲽�����������ĸ߶ȵĵ�������ˣ�ÿ�����ڣ�ʽ(8)�����IJο��߶��뵱ǰ���ڲ�����������ʵ�ָ߶ȿɵ��䲽�����С�
 (15)
(15)
ʽ�У� ΪԤ��ʱ�������IJο��߶ȣ�����Ԥ�����ڵIJ�����ͨ�����1�ó���Ӧ�������ܺ�������IJο��߶ȡ�
ΪԤ��ʱ�������IJο��߶ȣ�����Ԥ�����ڵIJ�����ͨ�����1�ó���Ӧ�������ܺ�������IJο��߶ȡ�
2.5������Լ�����ι滮����
���ʽ(12)��Լ�����̣�ʽ(8)���Ż�Ŀ�꺯�����Ż��������տɱ�ʾ������QCQPģ�ͣ�


 (16)
(16)
ʽ�У� Ϊ�Ż�Ŀ�꺯����
Ϊ�Ż�Ŀ�꺯���� ΪԼ��������
ΪԼ�������� ����ʽ(9)��ʾ������ʸ����
����ʽ(9)��ʾ������ʸ���� ��Ŀ�꺯����Hessian����
��Ŀ�꺯����Hessian���� ΪԼ�����̵�Hessian����
ΪԼ�����̵�Hessian���� Ϊ1����ϵ������
Ϊ1����ϵ������ ΪԼ�������ij����
ΪԼ�������ij���� ��
�� �ֱ�Ϊ���������Ŀ��Լ��������Ŀ��
�ֱ�Ϊ���������Ŀ��Լ��������Ŀ��
ʽ(16)��Ŀ�꺯��Hessian����Q��1����ϵ������q�Ƶ����£�
 (17)
(17)
 (18)
(18)
ʽ(17)��diag�����Ը�����Ϊ�Խ�Ԫ�����ɶԽǾ����Խ�Ԫ�ؾ���������£�
 (19)
(19)
 (20)
(20)
ʽ�У�IΪ��λ����
ʽ(16)��Լ������Hessian���� ��1����ϵ������
��1����ϵ������ �ͳ������Ƶ����£�
�ͳ������Ƶ����£�
 ��
��


 ��
��


ʽ�У� ��Ϊ��ǰZMPλ�ã�
��Ϊ��ǰZMPλ�ã� ��Ϊ��
��Ϊ�� ��ʱ�̵�ӳ�����
��ʱ�̵�ӳ����� ��Ϊ������ʸ����ȡ����Ӧ���������ӳ��������������ڵ���ͶӰǰ��λ���������ΪSjx=[I
��Ϊ������ʸ����ȡ����Ӧ���������ӳ��������������ڵ���ͶӰǰ��λ���������ΪSjx=[I 000
000 ],
], ��
��
һ������ʽ(16)��ʾ�Ķ���Լ�����ι滮���⣬�����ת��Ϊ���ж��ι滮(sequential quadratic programming, SQP)���[19]�����ü�SQP��������ʽ(16)��Χ�Ƴ�ʼ������������¶��ι滮���⣺


 (21)
(21)
����ι滮��ͨ�� ����״̬���������µ��ظ���
����״̬���������µ��ظ��� ���ò����ظ�
���ò����ظ� ��(������ȡΪ2���Ż����������Ҽ���Ч�ʽϸ�)��
��(������ȡΪ2���Ż����������Ҽ���Ч�ʽϸ�)��
Ϊ����Ż�����Ľ���Ч�ʣ�ȡMPCģ����Ԥ��ʱ�����������ڻ������˶����Ʋ���������� ��ͬʱ��֤
��ͬʱ��֤ (���У�
(���У� ΪԤ��ʱ����
ΪԤ��ʱ���� Ϊ��������ʱ��)���õ���Ԥ��ʱ���ڵ����Ĺ켣ͨ������Hermite��ֵ���ó��������Ϊ�Ĺ켣��
Ϊ��������ʱ��)���õ���Ԥ��ʱ���ڵ����Ĺ켣ͨ������Hermite��ֵ���ó��������Ϊ�Ĺ켣��
3 ʵ��
3.1��ʵ��ƽ̨���������
��Aldebaran Robotics��˾���NAOH25������Ϊʵ��ƽ̨����ʵ�飬������Ϊ0.574 m���Źؽڸ߶�Ϊ0.330 m��˫�����ļ��Ϊ0.100 m������Լ5.4 kg����֫����12�����ɶȣ���ʵ����ά���С�
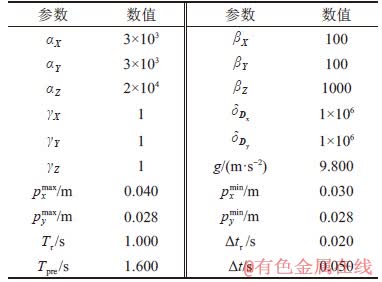
��ʵ������У�Ĭ�ϸ����ڲο�����Ϊ0.04 m���ο�����Ϊ0.10 m���ڶ������ڶ��߶�Ϊ0.02 m��Ϊ��С�㲿��������ײ���ڶ��ȹ켣����5�ζ���ʽ��ֵ��ģ�Ͳ������2��ʾ��
��2��ģ�Ͳ�������
Table 2��Model parameters setup
3.2���䲽������
�ڸ��ӵ��滷���£�������Ӧ�߱�ͨ��������������Խ�����ϰ����ȱ�ݵ���������������߶ȿɵ��ı䲽���������ԡ�������3��ʾ�ı䲽�����в������ã�Ĭ�ϲ���Ϊ0.040 m������Ϊ0.100 m�����ĸ߶�Ϊ0.320 m��
��3���䲽�����в�������
Table 3��Variant step-length parameter setup for biped walking
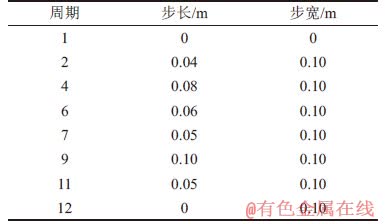
����3�������ڲ��в��������ı��⣬�������ھ�ʹ��Ĭ�ϲ������ɱ�3�ɼ��������˽��ӵ�2�����ڿ�ʼ��ǰ���������䲽���˶���ͬʱ�ڵ�12������ֹͣ��
3.2.1���䲽������ʵ�顡
���ñ��ķ��������������IJο��߶ȸ��ݲ���ѡ�����ֵ���������1�����ɵ����IJο��켣��ͼ4��ʾ����ͼ4�ɼ����������ڵ�4�����ڸı䲽������4���������IJο��߶�Ҳ����Ϊ��Ӧ�ܺ���͵ĸ߶ȣ��������ڵ�3�������Ѿ���ʼ�½�������ʾ��MPCģ�͵����ã����ɸ���Ԥ���ӽ��ڲο�״̬�ı仯����ǰ�������Ĺ켣���Ӷ���֤Լ���������Ż�Ŀ�꺯�����š�

ͼ4���䲽�����IJο��켣
Fig. 4��COM trajectories for bipedal walking with variant step-length
�ֱ���ں㶨�߶�LIPM�ͱ������������������Ĺ켣�����б䲽�����߶Ա�ʵ�顣���ú㶨�߶�LIPM�������ɱ䲽�����Ĺ켣ʱ�����ĸ߶ȷֱ�ȡ0.320 m��0.315 m������0.320 mΪĬ�ϸ߶ȣ�Ϊ����0.04 m���ܺ����ʱ�����ĸ߶ȣ���0.315 mΪ���߲�̬����ʱ���ؽڽǶȲ�����ͻ���������ĸ߶ȡ�ʵ��ZMP�켣�ɻ��������ѹ�����м���ó�������ʵ������ͼ5��ʾ����ͼ5�ɼ���
1) ���ڹ̶��߶ȵ�LIPM�������ɱ䲽����̬���ڸ߶�ȡ0.320 mʱ���������ڵ�9�����ڲ�������Ϊ0.10 mʱˤ������ʵ�ֱ䲽�����У�ʵ���й۲������ϥ�ؽ�ת������ͻ�䡣
2) ���ڹ̶��߶ȵ�LIPM�����ڸ߶�Ϊ0.315 mʱ����ʵ�ֱ䲽�����ߣ�������ʵ��ZMP������֧�������ڡ�
3) ���ñ�������ı����ĸ߶Ȳ��ԵIJ�̬�滮��������������ͨ�������ĸ߶�����Ӧ�����仯�������������߹������ܽϺõظ���Ԥ�����㲿��ŵ㣬������ʵ��ZMP�켣ʼ�ձ������㲿֧�������ڣ���ʵ���ȶ��䲽�����С�
4) ���ڱ����ĸ߶Ȳ��Եı䲽����̬���ɷ����������ڽϸߵij�ʼ�߶�����ɱ䲽���˶��������˵IJ������ڷ�Χ���ܳ�ʼ�߶�Ӱ�졣���ڻ��ں㶨�߶ȵ�LIPM�IJ�̬�滮�����У�Ϊʵ�ֱ䲽�����У�����ѡ��ϵ͵����ĸ߶ȡ�
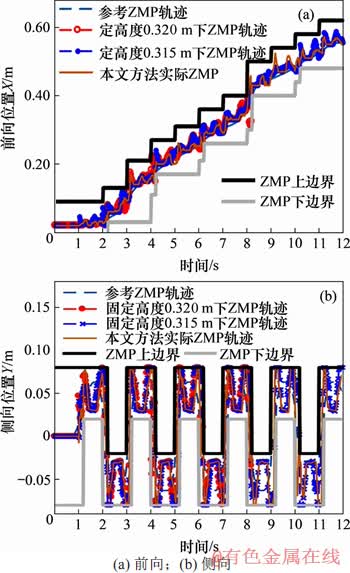
ͼ5��ʵ��ZMP�켣�Ա�
Fig. 5��Comparison of ZMP trajectories
3.2.2����������Ч�ʡ�
NAO�����˲���ʵ���Ѿ�֤�������ڱ����ĸ߶ȵı䲽�����в��Կ�ʵ���ȶ��ı䲽�����У������ڲ��ú㶨�߶ȵ�LIPM��Ϊʵ�ֱ䲽���˶��������˶�ѧԼ�����ȶ���Լ��������ѡ��ϵ͵����ĸ߶ȡ�
����ͨ���ԱȲ���ʵ���л������������ģ�������ͳ���߶�LIPM�����ͱ�������ķ����ڱ䲽���µ�������������0.320 m�Ĺ̶��߶��»�����δ����ɱ������õı䲽�����ߣ�����ֻ�Ա��˹̶��߶�Ϊ0.315 m�ͱ�������ı����ĸ߶ȷ���2��ʵ������ʵ������ʾ���̶����ĸ߶�ʱ��ƽ������Ϊ0.336 8 A�������ĸ߶�ʱ��ƽ������Ϊ0.279 7 A�������˹ؽ�ƽ��������ͼ6��ʾ��
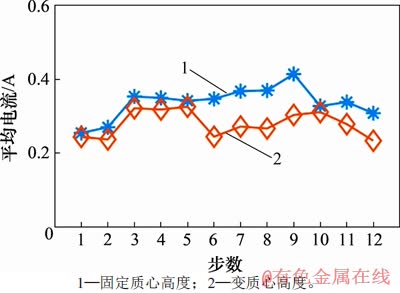
ͼ6�������˹ؽ�ƽ������
Fig. 6��Average current of robot joint
��ͼ6�ɼ������趨�ı䲽������ʵ���У����ñ����ĸ߶Ȳ��ԣ������˵����ܺĵ��ں㶨�߶ȵı䲽�������ܺģ�����ں㶨�߶ȣ���ƽ���ܺĽ���Լ16%��
4 ����
1) ���һ�ֻ���ģ��Ԥ����Ƶĸ߶ȿɵ��䲽����̬���ɷ�����ͨ���ȶ���Լ������������Լ�����ι滮���ģ�ͣ������ɱ�߶����Ĺ켣��
2) ���ڱ����ĸ߶Ȳ��Եı䲽����������ں㶨�߶ȵı䲽�����У�ƽ���ܺĽ���Լ16%��
3) ����������ʵ��������߲�̬����Ӧ���������ţ���MPC��֧�����߹켣���ɺ��Ż������д���һ���о�������һ�ε��о��У��������������Ĺ켣��ͬʱ���������˶��������ɸ��ӷ��˵IJ�̬����߱�������й����л����˵��ȶ��Ժ�³���ԡ�
�ο����ף�
[1] ���ƻ�, �쾸, ½־��. ���˷�������˷�չ���о���״[J]. ������, 2017(4): 51-64.
YAN Yunhui, XU Jing, LU Zhiguo Development and research status of humanoid service robots[J]. Robot, 2017(4): 51-64.
[2] �|����˾. ���˻�����[M]. ������, ��. ����: �廪��ѧ������, 2007: 1-14.
KAJITA S. Humanoid robot[M]. GUAN Yisheng, trans. Beijing: Tsinghua University Press, 2007: 1-14.
[3] ������, ���ɾ�. ˫����������߿������Ż�[M]. ����: �廪��ѧ������, 2016: 1-40.
CHEN Qijun, LIU Chengju. Waiking control and optimal for biped robots[M]. Beijing: Tsinghua University Press, 2016: 1-40.
[4] KAJITA S, MORISAWA M, MIURA K, et al. Biped walking stabilization based on linear inverted pendulum tracking[C]// IEEE/RSJ International Conference on Intelligent Robots & Systems. IEEE, 2010: 117-126.
[5] ��˧, ������. ����LIPM��˫������˱䲽�����߹滮[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2009(S1): 121-124.
FENG Shuai, SUN Zengxi. Step-size variable gait planning for biped robot based on LIPM[J]. Journal of Southeast University (Natural science edition), 2009(S1): 121-124.
[6] ������, ������, �˹��. ˫������˱䲽������ģʽ���������ɷ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 13(3): 292-297.
ZHANG Shilong, LIU Gguodong, PAN Guibing. Online generation Method of the variable step length for biped robot walking pattern[J]. Journal of Jiangnan University(Natural science edition), 2014, 13(3): 292-297.
[7] AFTAB Z, ROBERT T, WIEBER P B . Ankle, hip and stepping strategies for humanoid balance recovery with a single model predictive control scheme[C]// IEEE-RAS International Conference on Humanoid Robots. Osaka,Japan. IEEE, 2012: 274-281.
[8] KUDOH S , KOMURA T , IKEUCHI K . Stepping motion for a human-like character to maintain balance against large perturbations[C]// IEEE International Conference on Robotics & Automation. Orlando, USA. IEEE, 2006: 15-19.
[9] ����, ��Сƽ. ���ڹ������ģ�͵IJ��л�����ƽ��ָ�����[J]. ������, 2011, 33(1): 244-250.
LIU Fei, CHEN Xiaoping. Balance recovery method of walking robot based on orbital energy model[J] Robot, 2011, 33(1): 244-250.
[10] ZHONG Qingbing, CHENG Fen. Trajectory planning for biped robot walking on uneven terrain��taking stepping as an example[J]. CAAI Transactions on Intelligence Technology, 2016, 1(3): 246-249.
[11] BRASSEUR C , SHERIKOV A, COLLETTE C, et al. A robust linear MPC approach to online generation of 3D biped walking motion[C]// IEEE-RAS International Conference on Humanoid Robots. Seoul, Korea IEEE, 2015: 154-168.
[12] SHIN H K, KIM B K. Energy-efficient gait planning and control for biped robots utilizing the allowable ZMP region[J]. IEEE Transactions on Robotics, 2014, 30(4): 986-993.
[13] DIEDAM H, DIMITROV D, WIEBER P B, et al. Online walking gait generation with adaptive foot positioning through Linear Model Predictive control[C]// Nice, France. IEEE/RSJ International Conference on Intelligent Robots & Systems. IEEE, 2009: 687-701.
[14] BRASSEUR C, SHERIKOV A, COLLETTE C, et al. A robust linear MPC approach to online generation of 3D biped walking motion[C]// IEEE-RAS International Conference on Humanoid Robots. IEEE, 2015: 211-230.
[15] HEERDEN K V . Planning COM trajectory with variable height and foot position with reactive stepping for humanoid robots[J]. Proceedings - IEEE International Conference on Robotics and Automation, 2015: 6275-6280.
[16] HEERDEN K. Real-time variable center of mass height trajectory planning for humanoids robots[J]. IEEE Robotics & Automation Letters, 2017, 2(1): 135-142.
[17] ��, �����, �. �������ſ��Ƶķ��˻���������������[J]. ������, 2018, 40(2): 34-41.
YI Jiang, ZHU Qiuguo, WU Jun. Walking vibration suppression for humanoid robot based on optimal control[J]. Robot, 2018, 40(2): 34-41.
[18] ������. ������Ч�Ż���˫���������ѧϰ���Ʒ����о�[D]. ����: �㶫��ҵ��ѧ�Զ���ѧԺ, 2013: 30-50.
WANG Liyang. Reasearch on self-learning control methods for biped robots based on energy-efficiency[D]. Guangzhou: Guangdong University of Techonology. College of automation, 2013: 30-50.
[19] JORGE N, STEPHEN J. Wright. Numerical optimization[M]. New York: Springer Press. 2006: 554-600.
���༭ ��������
�ո����ڣ� 2019 -06 -17; �����ڣ� 2019 -08 -23
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51675385) (Project(51675385) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�Ф���ͣ���ʿ�����ڣ������ƶ�������ѧ�������������о���E-mail��xhxiao@whu.edu.cn

