GPS精密单点定位方法监测高层建筑风致响应
匡翠林1,易重海1, 2,戴吾蛟1,曾凡河1
(1. 中南大学 地球科学与信息物理学院,湖南 长沙,410083;
2. 现代城市测绘国家地理信息局重点实验室,北京,100044)
摘要:针对传统传感器及GPS差分方法监测高层建筑风致动态响应特征的不足,提出基于GPS精密单点定位(PPP)技术监测风振的新方法。研究结果表明:PPP方法与GPS差分方法在振动频率识别以及振动位移大小观测方面能取得一致的结果,而通过对实际工程监测数据得出,PPP方法与传统加速度器方法在获取监测建筑主振模态及振动加速度方面能取得一致结果。基于PPP方法监测高层建筑风致动态响应特征既可节约成本,又能保证精度。
关键词:精密单点定位;高层建筑;风致响应
中图分类号:P22 文献标志码:A 文章编号:1672-7207(2013)11-4588-09
Measuring wind-induced response characteristics of tall building based on GPS PPP method
KUANG Cuilin1, YI Zhonghai1, 2, DAI Wujiao1, ZENG Fanhe1
(1. School of Geosciences and Info-Physics, Central South University, Changsha 410083, China;
2. Key Laboratory for Urban Geomatics of National Administration of Surveying, Mapping and Geoinformation, Beijing 100044, China)
Abstract: In order to overcome the disadvantages of monitoring wind-induced dynamic response characteristics of high-rise building using traditional sensors, or differential GPS positioning method, a new method based on the GPS precise point positioning (PPP) technology was proposed. The results show that PPP method and differential GPS method have good consistency in the vibration frequency identification and observation of the vibration displacement. Engineering practice data analysis shows that PPP method and accelerator method have good agreement on model parameter identification and observation of response acceleration. PPP method can save costs but also ensure accuracy for monitoring wind-induced dynamic response characteristics of high-rise building.
Key words: precise point positioning; high-rise building; wind induced response
高层建筑在载荷、强风、温度变化,以及地震等外界因素的影响下将发生振动变形及缓慢的伪静态变形[1],变形量的大小直接影响其安全健康,所以,对高层建筑进行动态变形监测,不但可及时发现其健康状况,避免灾难性事故发生,而且对建筑安全运营能力评估、结构设计参数检验、建筑寿命评估等都具有极其重要的意义。在外部载荷中,高层建筑受风的影响最大。因此,在高层建筑设计阶段,研究人员常通过风洞实验室对高层建筑的比例模型进行多次反复试验来研究建成建筑在日常运营和极限风力情况下的动态响应特性,并且从可居住性和安全性角度分析这些响应如何影响高层建筑的表现和使用[2-3],但是,由于建筑比例模型与实体、风洞中的模拟风与实际环境风的差异一般较大,往往给试验结果带来较大的误差。所以对已建成的高层建筑进行风致振动实测有十分重要的意义[4]。目前对高层建筑进行振动变形监测的常规传感器主要有:加速度仪、倾斜仪、自动跟踪全站仪、位移传感器、激光干涉仪等。这些方法尽管能达到一定目的,但都存在不足[5]。近年来,由于GPS技术在软硬件性能方面的大幅度提高,促使基于其进行工程结构健康监测已成为测绘和土木工程领域中的一个新研究热点[6-7]。GPS事后单历元动态定位技术和实时动态定位(RTK)技术是2种目前用于高层建筑在环境载荷激励下的动态变形监测方法[8-12]。由于这2种方法都是基于GPS差分定位技术,所以下文把它们称作GPS差分方法。GPS差分方法基于定位误差的相关性,在短基线的情况下能较好地消除或减小定位误差,从而获得高精度的位移变形信息。但GPS差分方法也存在缺点,例如,至少需要2台高性能大地型GPS接收机,成本较高;要建立观测环境良好的GPS基准站,这对于高楼林立的现代化大都市常常难以满足;基准站与监测站所处的环境差异大,某些误差难以较好地消除,比如由2个GPS测站高差差异带来的对流层延迟误差,测站周边环境差异带来的多路径误差等;基准站的误差将完全地传递给监测站,尤其是多路径误差,从而影响监测站观测变形信息的精度;误差相关性随着距离的增大而下降,导致监测精度随着GPS监测站与参考站之间的距离增大而降低,等等。基于此,本文提出利用GPS非差精密单点定位(precise point positioning,PPP)技术监测高层建筑风致动态响应的新思路。通过模拟实验及其工程实践,对比分析新方法与GPS差分方法及传统的加速度器方法之间的监测数值差异,以验证PPP技术监测高层建筑风致动态响应的可行性与可靠性。
1 PPP技术监测建筑风致动态响应原理
PPP技术的基本思想是将GPS 定位中的误差划分为轨道误差、卫星钟差和电离层延迟误差、对流层延迟误差及接收机钟差等,将定位中的卫星轨道和卫星钟差固定为一个全球网络解得到的高精度卫星轨道和钟差,如IGS 及其分析中心发布的高精度GPS 卫星轨道和钟差产品,采用消电离层组合观测值消去电离层延迟误差,将对流层延迟误差和接收机钟差作为未知参数与测站的坐标参数一并解算,获取高精度的GPS 定位结果,包括高精度GPS 测站坐标、天顶对流层延迟参数和接收机钟差等参数[14]。PPP数据处理策略较GPS差分方法具有如下优点:(1) 只需要单台GPS接收机就可完成作业,极大地降低作业成本;(2) 作业方式灵活,定位精度均匀,(2) 解算速度与测站数成线性比例关系,打破了差分法的计算瓶颈;(3) 可利用的观测数据多,保留了所有观测信息。近些年,该技术通过国内外学者不断深入研究,其定位精度不断提高,应用领域也不断扩大与深入,这为PPP技术在高层建筑动态变形监测中奠定了基础。其工作原理如图1所示,在被监测建筑的楼顶开阔地方架设一台高精度的大地型GPS接收机,进行高采样率GPS数据采集,通过解算观测的高频数据获得建筑的动态位置,再与高层建筑的参考坐标进行求差,从而获得其在载荷风作用下的顺风向和横风向振动变形和伪静态变形[13]。

图1 PPP方法监测高层建筑风致动态变形示意图
Fig.1 Schematic diagram of wind-induced response measurement by GPS PPP method
2 PPP定位方法数据处理模型
PPP定位数学模型可分为观测模型和随机模型。观测模型一般采用消电离层组合伪距PIF和消电离层组合相位LIF,其表达式为[15]:

 (1)
(1)

 (2)
(2)
式中:Li和P i (i=1, 2)分别为以距离表示的相位和伪距观测值(m);fi为Li观测值的频率(Hz);ρ为卫星至接收机的几何距离(m);c为真空中的光速(m/s);T为对流层延迟和电离层延迟(m);dT和dt为接收机钟差和卫星钟差(s);Ni为Li观测值的相位模糊度;εi和ei为LIF相位观测值和PIF伪距观测值噪声。
PPP定位的随机模型即为观测值的方差阵。依据卫星观测值高度角来定权是一种简单且行之有效的方法。假设某一卫星i的高度角为ei,天顶方向消电离层伪距观测值和相位的中误差分别为δ0,P和δ0,L,一般取δ0, P为±1 m,δ0, L为±1 cm,则卫星i的伪距和相位观测值方差为
 (3)
(3)
3 建筑风致振动监测模拟试验研究
3.1 试验设计
试验基于香港科技大学风洞实验室设计的模拟振动平台,采用2台高采样率的TOPCON GB-1000双频GPS接收机,一台固定作为参考站,另一台安置在振动平台上,两者相距约10 m,观测场地开阔,并采用CR-3型扼流圈天线,用以减弱多路径效应的影响,数据采样率为10 Hz。为了结果对比,试验还采用了激光测距传感器直接对振动平台的振动位移进行测量。整个模拟振动试验如图2所示。在伺机马达的控制下,振动平台分别以不同的频率和振幅组合沿正北指向作正弦振动。
图3所示为是伺机马达在设置振动频率为0.5 Hz,振动幅度为7.5 mm时激光位移传感器观测的位移序列。清晰而精确的位移结果表明激光位移传感器的观测很高,同时也验证了设计的振动平台具有良好的工作性能。激光传感器的结果与GPS差分方法的结果已在文献[1]和[13]中进行了对比,本文对比分析PPP方法与GPS差分方法的数值结果。

图2 GPS模拟振动实验系统
Fig.2 Setup of GPS simulation shaking test system

图3 激光位移传感器观测的位移序列
Fig.3 Displacement observed by laser displacement sensor
3.2 结果分析
基于GPS参考站和监测站数据组成的基线进行处理可获得GPS差分方法的结果,而仅利用GPS监测站数据进行处理可获得PPP方法的结果,两者都是在空间直角坐标系下的三维位移信息(X,Y,Z)。由于震动平台放置方位基本是正北朝向,所以,依据下列公式把(X,Y,Z)转换到站心坐标系(N,E,U)下[16],N方向的坐标变动就代表着振动台的震动位移。
 (4)
(4)
其中:转化矩阵M的表达式为

式中: 为NEU坐标系的坐标原点在XYZ坐标系中的坐标,
为NEU坐标系的坐标原点在XYZ坐标系中的坐标, 和
和 分别为坐标原点的大地经度和大地纬度。
分别为坐标原点的大地经度和大地纬度。
基于快速傅里叶变换(FFT)对PPP方法和GPS差分方法获得的N方向位移进行频谱分析,结果如图4所示,其中图4(a)和(c)所示为2方法全频段信息,而图4(b)和(d)所示为对应0 Hz至1 Hz之间的局部放大图。经对比结果可得:两者在振动频率识别方面具有较一致的数值结果,且两者在低频部分都表现出较高的谱密度,这主要是GPS残余误差导致的,例如多路径误差。利用GPS技术做大型结构振动监测的最显著优势是其能直接获得振动位移信息。图5所示为PPP方法和GPS差分方法获得的某50 s时间内N方向振动位移对比。图5反映的是振动平台先作振幅为2 cm的正弦运动,接着突然停止振动。2个位移序列在变化趋势和数值大小方面较一致,而相比标准的正弦运动有锯齿状的变动,这主要是由GPS定位精度本身决定的。

图4 PPP方法与GPS差分方法的频谱比较
Fig.4 Spectrum comparison between PPP method and GPS differential method
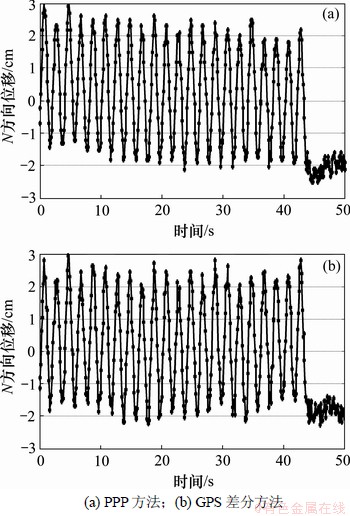
图5 PPP方法和GPS差分方法观测的位移对比
Fig.5 Displacement comparison between PPP method and GPS differential method
4 PPP技术风致振动监测实例
4.1 工程监测设计
香港科技大学风洞实验室和香港理工大学土地测量与地理资讯学系于2007―2008合作对香港某一高层建筑进行了长时间的动态监测[1, 9, 13]。整个监测系统连续自动运行,安装的数据采集仪传感器包括2台TOPCON GB-1000大地型GPS接收机、4个Honeywell QA-650型加速度器、1个GILL型超声速风速器。其中:2台GPS形成1条约0.84 km的短基线用来监测大厦的风致动态位移,1台安装在大厦的顶层作为动态监测站,1台安装在香港理工大学某一低层办公楼上作为固定参考站,如图6所示。4个加速度器用来监测大厦风致振动的加速度,它们分2组分别正交安装在大厦顶层的边翼和中心。风速器安装在楼顶的制高点,用来观测大厦现场的风速和风向。GPS的数据采样率为10 Hz,而加速度器及风速器的采样率为20 Hz。高层建筑的平面视图及仪器设备的平面位置分布见图7。监测大厦高度为260 m左右,共68层,周围环境开阔,易受风载荷影响,方位为北偏西42°。建筑整体外形呈长方形,长、宽比例为4:1。

图6 GPS监测设置
Fig.6 GPS setup of monitoring system

图7 动态变形监测系统的仪器安置
Fig.7 Sensor setup of monitoring system
4.2 监测结果分析
分析的数据采集于2008年8月6日2时至3时(UTC时间),期间台风北冕正经过香港,且风速达到8级。
4.2.1 建筑模态参数识别分析
高层建筑物在外界激励条件下的前3个主模态的振动频率对其设计及运营安全十分重要。图8所示为基于FFT对加速度器观测的1 h加速度时间序列进行频谱分析的结果,其中图8(a)和(b)所示分别为加速度组1在X和Y方向的结果,而图8(c)和(d)为加速度组2在X和Y方向的结果。从图8可以看到:加速度器观测值受外界噪声影响小,能很好地检测出监测建筑的前三个主模态的振动频率,第一模态为0.21 Hz、第二模态0.35 Hz、第三模态为0.43 Hz。GPS接收机的采样频率为10 Hz,由宁奎斯特理论可知:GPS差分方法和PPP方法能监测到5 Hz以下的振动频率。先把2种方法解算的坐标位移序列转换到建筑坐标系统,如图7所示,从而与加速度器观测的数据在同一坐标框架下,再通过FFT对位移数据进行频谱分析,图9和图10分别为基于 GPS差分方法和PPP方法所得的频谱。从图9和10中可以看出:在低频部分2种方法都表现出高能量密度,这主要是GPS多路径等测量噪声引起的。综合X和Y方向的频谱密度可以发现:PPP方法与GPS差分方法识别的3个主模态频率与基于加速度器方法识别的一致,仅在PPP方法的Y方向,第三模态为0.41 Hz,与已知的0.43 Hz有微小差别。GPS差分方法因受参考站误差的影响,在Y方向上只反映了第三模态,而PPP方法则对3个主模态都有所反映,但是信号能量都较低。以上分析的数值结果并非十分理想,这主要与监测建筑的外形有关,但基于PPP方法识别大型构筑物主模态参数是可行、可靠的。

图8 加速度器观测的加速度序列频谱分析
Fig.8 Spectrum analysis based on acceleration time series

图9 GPS差分法位移的频谱结果
Fig.9 Spectrum analysis of displacement time series based on GPS differential method

图10 PPP法位移的频谱结果
Fig.10 Spectrum analysis of displacement time series based on PPP method
4.2.2 风致振动位移分析
由于被监测高层建筑的风致振动位移很小,所以,PPP方法和GPS差分方法观测的位移信息受外界噪声干扰相对较大,在进行位移对比前,先对转换后的位移时间序列进行去噪处理。去噪的方法有多种[17-18],基于GPS定位的误差重要集中地低频部分,且高层建筑的主模态信号一般小于1 Hz,本文采用数字滤波方法,取带通滤波的频率范围为0.1~1 Hz,滤波后2种方法的位移序列如图11所示。从图11可以看出:除了PPP方法在Y方向出现了2处短暂的突跳外,两者不管在X方向还是Y方向都十分相近。再由上面建筑模态参数识别分析可知:在0.21,0.35和0.44 Hz处振动位移表现出相对较高的信号能量密度,在这3个频率上各截取1个频段进行带通滤波以获得对应模态的振动位移,这里取第一模态截取频率为0.17~0.24 Hz,第二截取频率为0.31~0.38 Hz,第三模态截取频率为0.40~0.47 Hz。建筑X方向第一个模态位移时间序列如图12所示,其中,图12(a)和(b)分别为GPS差分方法和PPP方法获得的第一模态位移,而图12(c)和(d)为图12(a)和(b)在1 800 s至1 900 s内的放大显示。可以看出:PPP方法能较好地监测出高层建筑的风致振动位移信息,并与GPS差分方法结果一致。

图11 PPP方法和GPS差分方法位移比较(滤波后)
Fig.11 Displacement comparison between PPP method and GPS differential method (after filtering)
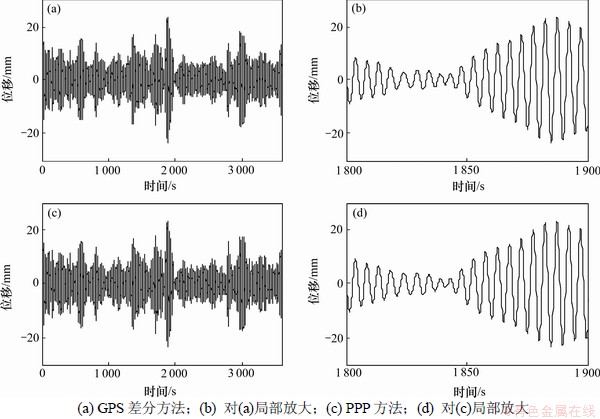
图12 PPP方法和GPS差分方法获得的第一模态位移比较
Fig.12 Displacement comparison of first mode between PPP method and GPS differential method
4.2.3 风致振动加速度分析
GPS差分方法和PPP方法观测的是建筑物振动的位移信息,为了与同时间内加速度器观测加速度信息相比较,需要对位移求二次偏导,以获得由位移推导的加速度。本文只对振动的主要部分,即建筑物X方向的第一模态位移量进行二次偏导求加速度。对加速度器监测结果在第一模态0.21 Hz附近截取频率0.17~0.24 Hz进行带通滤波,得到第一模态加速度。图13(a)~(c)所示分别为加速度器方法、GPS差分方法和PPP方法得到的第一模态的加速度。从图13可以看出:3种方法所测得的最大加速度十分接近,且达到最大值的时间较一致,参见图中文字部分,@符号之前表示最大值的数值,之后表示达到最大值的时刻。为了更加细致地比较,取图13中1 850~1 950 s的结果进行局部放大,结果如图14所示,从图14可以看出:三者不管是在变化趋势上,还是在微小数值上都基本相同。以上加速度对比结果再次验证了PPP方法观测高层建筑风致响应特征的可行性。

图13 第一模态加速度对比
Fig.13 Acceleration comparison of first mode
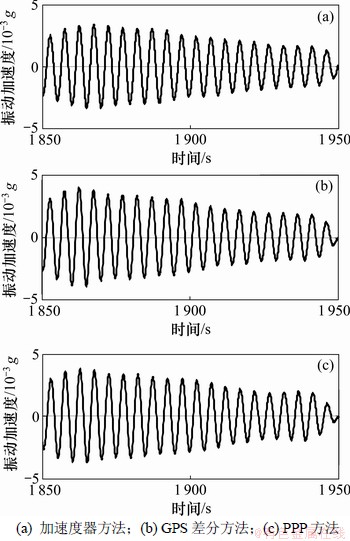
图14 局部放大图13的第一模态加速度对比
Fig.14 Acceleration comparison of first mode of zoom in Fig.13
5 结论
(1) GPS定位技术因具有精度高、不受气候条件影响,自动化程度高、可直接获取三维位移信息等诸多优点,已发展成为高层建筑结构健康监测中的一种新技术。
(2) PPP技术因只需单台GPS接收机就能作业,与至少需要2台GPS才能作业的差分方法相比,极大地节约了硬件成本。基于GPS PPP定位技术的优势,提出将其应用到高层建筑动态变形监测中。
(3)通过对模拟振动实验和实际监测工程中多传感器监测的数据作数值比较分析得出,在振动频率识别、振动位移和加速度信息观测方面,PPP方法与GPS差分方法、传统的加速度器方法所得结果有着良好的数值一致性。这充分论证了PPP方法在振动变形监测中的可行性和可靠性。
(4) 高层建筑风致变形包括振动变形和伪静态变形2部分,目前由于动态PPP的精度限制,该技术还未能较好反映变形信息的伪静态部分。但随着PPP定位误差模型的不断精化、组合多全球导航卫星系统GNSS的深入发展以及盲信号分离处理技术的成功应用,PPP技术将有望较好地监测高层建筑全局变形位移信息,从而展示其广阔的应用前景。
致谢:
感谢香港科技大学风洞实验室在试验数据采集中提供的帮助!
参考文献:
[1] Kuang C L, Kwok K C S, Hitchcock P A, et al. Wind-induced response characteristics of a tall building from GPS and accelerometer measurements[J]. POS, 2011, 2(1): 1-13.
[2] Fediw A A, Nakayama M, Cooper K R, et al. Wind tunnel study of an oscillating tall building[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1995, 57(2/3): 249-260.
[3] Kwok K C S, Hitchcock P A, Burton M D. Perception of vibration and occupant comfort in wind-excited tall buildings[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2009, 97(7/8): 368-380.
[4] Wu J R. Field measurements and numerical study and wind effects on tall building[D]. Hong Kong: City University of Hong Kong. Department of Building and Construction, 2006: 56-83.
[5] 袁东, 孙成城, 王嘉扬. 高层建筑动态变形的GPS监测技术[J]. 合肥工业大学学报, 2005, 28(8): 926-930.
YUAN Dong, SUN Chengcheng, WANG Jiayang. Study of dynamic transformation of high-rise buildings by using GPS survey technology[J]. Journal of Hefei University of Technology, 2005, 28(8): 926-930.
[6] Ogaja C, Xi L, Rizos C. Advances in structural monitoring with Global Positioning System Technology: 1997-2006[J]. Journal of Applied Geodesy, 2007, 1(3): 171-179.
[7] Donets A. Using single receiver GPS observations to analyze the dynamic motion of large engineering structures[D]. Melbourne: The University of Melbourne. Department of Infrastructure Engineering, 2011: 73-95.
[8] Lovse J W, Teskey W F, Lachapelle G, et al. Dynamic deformation monitoring of a tall structure using GPS technology[J]. Journal of Surveying Engineering, 1995, 121(1): 35-40.
[9] 戴吾跤, 朱建军, 丁晓利, 等. GPS建筑物振动变形监测中的单历元算法研究[J]. 武汉大学学报信息科学版, 2007, 32(3): 234-237.
DAI Wujiao, ZHU Jianjun, DING Xiaoli, et al. Single epoch ambiguity resolution in structure monitoring using GPS[J]. Geomatics and Information Science of Wuhan University, 2007, 32(3): 234-241.
[10] Kijewski-Correa T, Kochly M. Monitoring the wind-induced response of tall buildings: GPS performance and the issue of multipath effects[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2007, 95(9/10/11): 1176-1198.
[11] Tamura Y, Matsui P L C, Ishibashi R, et al. Measurement of wind-induced response of buildings using RTK-GPS[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2002, 90(12/13/14/15): 1783-1793.
[12] 李宏男, 伊廷华, 伊晓东, 等. 基于RTK GPS技术的超高层结构风振观测[J]. 工程力学, 2007, 24(8): 121-126.
LI Hongnan, YI Tinghua, YI Xiaodong. et al. Measurement of wind-induced response of tall building based on RTK GPS technology[J]. Engineer Mechanics, 2007, 24(8): 121-126.
[13] 匡翠林, 戴吾蛟. GPS监测高程建筑物风致振动变形的小波应用[J]. 武汉大学学报: 信息科学版, 2010, 35(9): 1024-1028.
KUANG Cuilin, DAI Wujiao. Measurement of wind-induced vibration of tall building using GPS and wavelet application[J]. Geomatics and Information Science of Wuhan University, 2010, 35(9): 1024-1027.
[14] Kouba J. A guide to using International GNSS Service (IGS) products[EB/OL]. [2012-05-05]. http://www.igs.org/igscb/ resource/pubs/UsingIGSProductsVer21.pdf.
[15] 易重海. 实时精密单点定位理论与应用研究[D]. 长沙: 中南大学地球科学与信息物理学院, 2011: 23-24.
YI Zhonghai. Research on theory and application of real time precise point positioning[D]. Changsha: Central South University. School of Geosciences of Info-Physics, 2011: 23-24.
[16] 黄立人, 高砚龙, 任立生. 关于NEU(ENU)坐标系统[J]. 大地测量与地球动力学, 2006, 26(1): 97-99.
HUANG Liren, GAO Yanlong, REN Lisheng. On NEU (ENU) coordination system[J]. Journal of Geodesy and Geodynamics, 2006, 26(1): 97-99.
[17] ZHENG Dawei, ZHONG Ping, DING Xiaoli, et al. Filtering GPS time series using a vondrak filter and cross-validation[J]. Journal of Geodesy, 2005, 79(6): 363-369.
[18] 钟萍, 丁小利, 郑大伟, 等. GPS结构振动监测数据滤波方法及其性能实验研究[J]. 测绘学报, 2007, 36(1): 31-36.
ZHONG Ping, DING Xiaoli, ZHENG Dawei, et al. Filter-based GPS structural vibration monitoring methods and comparison of their performances[J]. Acta Geodaetica et Cartographica Sinica, 2007, 36(1): 31-36.
(编辑 何运斌)
收稿日期:2012-10-19;修回日期:2012-12-05
基金项目:国家自然科学基金资助项目(41004012, 41074004);现代城市测绘国家测绘地理信息局重点实验室经费资助项目(20111202W)
通信作者:匡翠林(1978-),男,江西泰和人,博士,从事GPS精密定轨定位研究;电话:0731-88830573;E-mail: kuangcuilin@gmail.com

