���Ͷ�����̽��·�ź�̨�������д�ɰ�Ļ���
������, ������, ������
(�㶫��ͨ���� �������,�㶫 ����, 510800)
ժҪ: ��ģ�·�š� ��̨�������д�ɰ��ʵ�ȼ�������ģ�����������, �����Ͷ�����̽���������̽�����ά����Ԫ��ֵģ������� �ڷ���������, ��������(Lade)ģ�ͼ��ա���Ӵ�ģ��, ģ�������Ͷ�����̽�������, �����̽ͷ��Χɰ��Ӧ���� Ӧ���λ�Ƴ�, ��֤����������������ȷ��, ��ʾ�����Ͷ�����̽�ڻ����д�ɰ�е����û����� �о��������, ���Ͷ�����̽���������š� ��̨�������д�ɰ��ʵ�ȼ�⡣
�ؼ���: ģ������; ���Ͷ�����̽; ������ϵ; ����ģ��; ����Ԫ��
��ͼ�����:U442.2 ���ױ�ʶ��:A ���±��: 1672-7207(2005)05-0911-07
Light dynamic penetration mechanism to test bridge back-sand fill
LIU Yang-shao, TIAN Qing-yan, LU Jian-bing
(Testing Center of Guangdong Transportation and Communication Group, Guangzhou 510800, China)
Abstract: On the base of lab tests to monitor relative density of back sand fill of bridge and culvert, a three-dimension numerical calculation was made in this paper. During calculation, Lade model and rigid-flexible attach model were applied to simulate the whole test periods. The stresses, strains and deformations around the test core are disclosed, the lab results are well proved, and the mechanisms of the light dynamic penetration inside back sand fills are well obtained. The results show that the light dynamic penetration can be well fit to test the heavy density of back sand fill of bridge and culvert.
Key words: model tests; light dynamic penetrating; constitutive relation; Lade model; finite element methods
���Ͷ�����̽������һ�ֳ��õ�ԭλ���Է���, ��������һ���Ĵ�������, ������̽ͷ��̽�˴�������, ����������׳̶��������������ʡ� ��һ��������, ����ȵĴ�С��ӳ��������ѧ���ʵIJ���[1, 2]�� �������Ͷ�����̽������, ���ڲ�����Я��, ��20����50�������, ������������Ͷ�����̽��չ���о�, �ó��˽϶�ijɹ�, ͬʱ���Ͷ�����̽��ɰ���е�Ӧ��Ҳ�õ��˷�չ�� ����, ���ڴ���, �����С, �����׳��ֵ���������, ��ȥ��Ϊ���Ͷ�����̽��������ϸɰ���ڵ�����, ���ҽ����ڻ���������ѧ�ֲ�, ��������ľ��ȳ̶�[3-12]�� ����ʵ������, ���Ͷ�����̽�������ź�̨��������ɰ�� ��ɰ�� ��ɰ�������ʵ�ȵļ�⡣ ���������Ͷ�����̽���ڼ�������ɰ�� ��ɰ�� ��ɰ�������ʵ��, Ŀǰ��û������ϵͳ���о�, ���Ͷ�����̽���ɰ�� ɰ���������û����о�Ҳδ��������
Ϊ��ʹ���Ͷ�����̽���������ڼ�������ɰ�� ��ɰ�� ��ɰ�������ʵ��, �������߶�4�ֿ�����ɺ���ʵ�Ȳ�ͬ��ɰ, ��ģ�Ͳ��ڽ�����һϵ�����ʹ�̽����, ���������ά����Ԫ��ֵģ��,Ӧ�����屾�����Ե�����(Lade)ģ�ͼ��ա���Ӵ�ģ��ģ����㶯����̽�Ĺ������, ̽�ִ�̽����������Ӧ���� Ӧ�䡢 λ�Ƽ��߽�Ӱ���С�ȹ������, ��֤��㶯����̽����������ȷ�ԡ�
1 ���鷽��
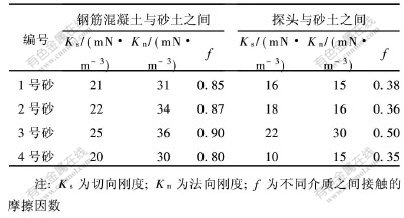
ѡ��4�ֿ�����ɰ, ��Ϊ�š� ��̨�����õĻ�����, ��һ��ģ�Ͳ�(2 m��2 m��2 m)�н���ģ������, �����23����Чģ������, �õ�72����Ч�������ݡ� �������������Ͷ�����̽�Ǽ���ָ����ͼ1�ͱ�1��ʾ[1], ������ʵ��״̬�µ�ɰ������ָ�����2��ʾ��
�� 1 ģ���������õ����Ͷ�����̽�豸ָ��
Table 1 Light dynamic penetrating equipment index in model test
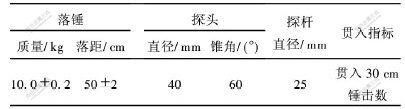
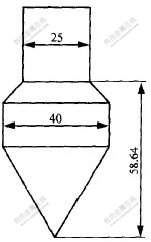
ͼ 1 ���Ͷ�����̽��ʾ��ͼ
Fig. 1 Sketch of light dynamic penetrating equipment
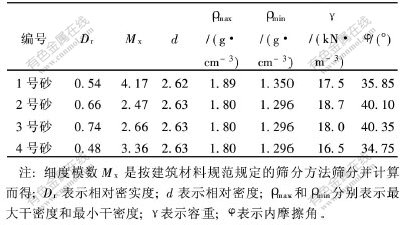
�� 2 ������ɰ����ָ��
Table 2 Substantial index of testing sand
2 ��ά����Ԫ�������
Ҫ��ʾ���Ͷ�����̽����, ��Ҫ��ȷ��̽ͷ��ΧӦ������ Ӧ�䳡��λ�Ƴ�[13-15]��
2.1 ����ģ��
���IJ����ܺܺ÷�ӳɰ���������Ե�����ģ����Ϊ���ı�����ϵ[16, 17]�� ���ڵ����Ա�����ϵ������ģ��, ��������Ǽٶ���Ӧ���ij�ɵ���Ӧ���eij�� ��������Ӧ���pij�� ����ѹ��Ӧ���cij���:
��ij=��eij+��pij+��cij��(1)
������ʽΪ:
�Ħ�ij=�Ħ�eij+�Ħ�pij+�Ħ�cij
����: �Ħ�eij�����廢�˶������; ����Ӧ�������Ħ�pij�ͦĦ�cij������λ��������(Plastic potential Theory)��á� ����Ħ�cijʱ, �ٶ������溯��Ϊ:
fc=I21+2I2��(2)
ʽ��: I1��I2�ֱ�ΪӦ����һ�� �ڶ��������� ���������������, �����ƺ���gc=fc, ���������ɵ�:

ʽ��: d��cΪ����ѹ��Ӧ����������; ��ijΪӦ��ֵ��
����Ħ�pijʱ, �ٶ����������ƻ�������, �������溯��Ϊ

�ƻ�����Ϊ
fp=��1��(5)
����: I3ΪӦ������������; ��1��mΪ���鳣��; pΪ����ѹǿ��
���ò������������, �ٶ������ƺ���Ϊ

����: ��2Ϊ���鳣����
���������ɵ�:

����: d��pΪ��������Ӧ������������
2.2 ��ά����Ԫ������
������ά����Ԫ��һ����֤���Ͷ�����̽��������, ͬʱ�����ڲ�ͬ�������ʵ�ȵ�ɰ��, ������̽�����ù�����ɰ�ڵ�Ӧ���� Ӧ���λ�Ʒֲ��������ֲ�����ͼ�� ģ�������, ����10���ռ�������Ȳε�Ԫ, ��ͼ2��ʾ��
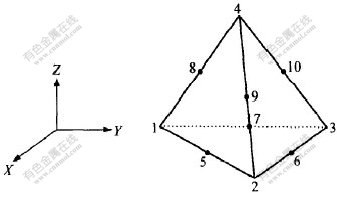
ͼ 2 ��������ϵ��Ԫ���ͼ
Fig. 2 Unit cross-points in whole coordinate system
�Ծֲ�����, ���ýڵ�λ�Ʒ������к�����ֵ, ��ֱ�ӹ������Ԫλ�ƺ���:
����: u, v��w�ֱ�Ϊ��Ԫ��x, y��z�����λ��; Ni(��, ��, ��)Ϊ�κ���; ��, �Ǻͦ�Ϊ�ֲ�����ϵ�µĽڵ�����; ui, vi��wi�ֱ�Ϊ��Ԫ���i��x, y��z�����λ�ơ�
���õ�������Ȳ�Ԫ��ĸԪ����4�������������嵥Ԫ��10���Ķ��������嵥Ԫ��(��ͼ1��ʾ), �κ���Ϊ:
Ni=(2Li-1)Li��(9)
����: i=1, 2, 3, 4; LiΪ������������һ����������4��������ɵ�4����������ԭ����������ı�ֵ��
���ڱ��н����:
���Ƶ�, ��Ԫ�նȾ���Ke��ʾΪ:
ʽ��: BΪ��ԪӦ�����; tΪ���; JΪ��ά������ſɱȾ���; DΪ���Ծ���
����ʽ(11)�����ܸնȾ���, �ɱ߽����������Ӻ���{R}�����λ������{��}��
[K]{��}={R}(12)
����{��}=[B] {��}��{��}=[D] {��}��ⵥԪӦ���Ӧ����
�ڷ���������Ԫ������, �������������õ��ĵ��Ծ�����鼯�ǹؼ����⡣
����ģ����2��������, �䵯���Ծ������������ʽ:

����:

f1��f2Ϊ��һ�� �ڶ����������������; g1��g2Ϊ��һ�� �ڶ�������������ƺ�����
2.3 ����ģ�ͼ�����
����ģ�ͼ��㷶Χ(����������)Ϊ2 m��2 m��2 m, �ü��㷶Χ������ģ������Ϊ�����ߡ� ģ�������, ̽ͷ������ȷֱ�Ϊ30, 60, 90, 120��150 cm, �ֽ�������ۡ�ɰ�����Ͷ�����̽����ģ�����֡� ���Ͷ�����̽̽ͷ����ģ��������ͼ3��ʾ, ����ģ����λ�ijߴ����ʵ����������
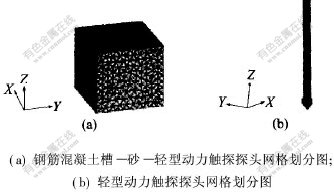
ͼ 3 ����ͼ
Fig. 3 Model reseau division
ͨ���غɰ�����, ȷ���˶�Ӧ���������4�ֲ�ͬ��ɰ�ڲ�ͬ��ʵ�������µĵ���ģ��E�Ͳ��ɱȦ�, �йؼ���������3�ͱ�4��ʾ��
2.4 �Ӵ��浥Ԫ
���μ�������桪��Ӵ������еĸա���Ӵ�ģ�ͽ��з����� ����ʱ, �����ж�DZ�ڵĽӴ���, Ȼ��ָ���Ӵ������С, �������涨��ΪĿ����, �����涨��Ϊ�Ӵ��档 ����ģ�Ϳ����˸ֽ��������ɰ����ɰ����̽ͷ֮��Ӵ���ĽӴ������
�� 3 ��ѧ����
Table 3 Stress parameters

�� 4 �Ӵ������
Table 4 Contact face parameters
2.5 ����������
2.5.1 ɰ����Ӧ����Ӧ�䳡�ķֲ�
�ٽ�����������ʵ�ȵĹ�ϵ��ͼ4��ʾ�� ��ͼ4��֪, �ٽ����(hcr)ȷʵ����, ���洸����N10�����Ӷ�����; ���������ʵ�ȵ�����, ���Ͷ�����̽���ߵ��ٽ���Ȼ�������������, ��ɰ�����ϴ�ʱ�������ʵ�Ƚϴ�ʱ, �ٽ�������ӵķ����ԼӴ�, ���ǿ�����ϸʱ(2��ɰ)���ٽ�������ӵ����Ʋ�ͬ�ڽϴֿ���ʱ�ٽ���ȵ���������, ʵ��ֵ�����ֵ����� �������ʵ��Dr=0.40~0.80ʱ, ����ɰ���ٽ����(hcr)�ɴ�С����Ϊ: 1��ɰ, 4��ɰ, 3��ɰ, 2��ɰ��
10�š� 11�š� 12�ź�13����ѹ���е�����ֱ�Ϊ45, 115, 76��155 cm�� ��̽ͷ���������, ɰ���е����Ӧ���� Ӧ�䷢���ھ���ѹ�������Ϸ���λ��, ��״����Ϊ����Բ�Ρ� ����Ԫ����ó���Ӧ���� Ӧ������ͼ����ѹ����ʵ���Ӧ���� Ӧ�����߶Ա������ͼ5��ͼ6��ʾ�� �ӶԱ�����ͼ���Կ���, ����ֵ��ʵ��ֵ�ܽӽ���
ͨ������Ԫ�����֪, ̽ͷ��ɰ��������ɰ��֮��, �������ʵ�ȴ��ɰ��̽ͷ��Χ�������������������, ɰ������ܼ�������¡��Ϳ���, ������һ�����, �������С���ٽ����ʱ, ̽ͷ������־ֲ�ԭ��Ӧ���ɳڻ��С(ʵ�⸽��Ӧ��Ϊ��ֵ, ��ͼ5��ͼ6��ʾ), ���ڵ��͵ļ����ƻ�; �����ʵ��С��ɰ����Ҫ��ѹ����崩����֧��, ���治��¡���¡�����ԡ� ���ڸ��������ʵ���µĹ��������ͬ�Լ��������÷�Χ�д�С֮��, Ӧ���� Ӧ���λ����ɰ���������ʵ�Ȳ�ͬ�������Բ��; ��������ȳ����ٽ���ȷ�Χʱ, ��ѹ������֧�����ʵ��С��ɰ, ���ٽ�ѹ��(��3)С, �������÷�Χ����, �ϸ���ѹ��������������, ���ٽ���������ܼ��л���֧�����ʵ�ȴ��ɰ, ���ٽ�ѹ����, ���ϸ���ѹ��Ӱ��ǿ��, ���, ���ٽ���ȴ���ѹ��Զ����ʵ��С��ɰ��ѹ����

ͼ 4 ���Ͷ�����̽�ٽ�����������ʵ�ȵĹ�ϵ
Fig. 4 Relation between hcr and Dr
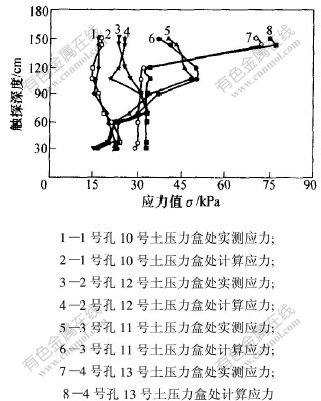
ͼ 5 4��ɰʵ��Ӧ�������Ӧ���Ƚ�
Fig. 5 Comparison of computation and test stress of sand NO.4
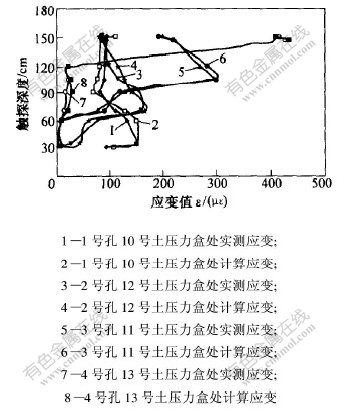
ͼ 6 4��ɰʵ��Ӧ�������Ӧ��Ƚ�
Fig. 6 Comparison of computation and test strain of sand No.4
ͼ7��ʾΪ����Ӧ���ݶ���ͼ�� ����������, ��1���ֵ������̽ͷ����ת�Ǵ����, ��״����Ϊ����Բ��; ��3���ֵ������������λ�õ�����洦, �������Ŧ�3������, �ڸô���Ӧ�����Ӻܿ�, ��˵���˴�Ӧ���߶ȼ��С�
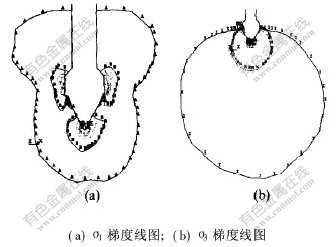
ͼ 7 Ӧ���ݶ���ͼ
Fig. 7 Stress trapezium
��ͼ7��֪, ������̽ͷ�ܱ߾��������, Ӧ���ҵݽ���б�ʱ�С, Ӧ����1��ɢ��������, Ӧ����3��ɢ�ʵ����Ρ�
2.5.2 ɰ����λ�Ƴ��ķֲ�
ͼ8��ʾΪ̽ͷ����ʱ��Χ��λ�Ƴ��� �ɼ��������������ı�����̬�ʾ��ȵġ�V������, �ڵ����µ��ٽ���ȷ�Χ��, ̽ͷ�ڹ���ʱ, �����Լ��б���Ϊ������ ̽ͷ���볬���ٽ����֮��, ���Ź������������, ���IJ���Լ��Ӧ��������, ��ʱ, ���л�����ʧȥ������λ, ������ѹ���������������á� Ҳ����˵: ��̽ͷ�Ĺ�����ȴ����ٽ����ʱ, ���Ͷ�����̽ÿ�����Ĺ���Ȼ����, ��Ҫ���������ѹ���Ի���ʵ�̶ȵĿ��ơ�
2.5.3 ģ�Ͳ���ɰ���߽��Ӱ��
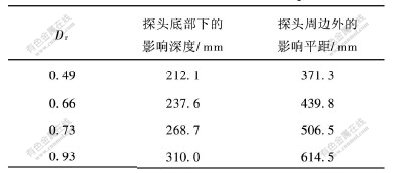
��ͼ7��֪, ��̽ͷ�²��н�С��Χ�ڵ�������, �������ķ�Χ�������ʵ�ȵ���������� �ɱ�5��֪, ͨ������Ԫ����ó�ģ�������д�̽��Ӱ�췶ΧΪ614.5 mm ��614.5 mm��310.0 mm�� ģ�������еIJ����һ���̶����ܵ�ģ�Ͳ����ڵ���߽��Ӱ�졣
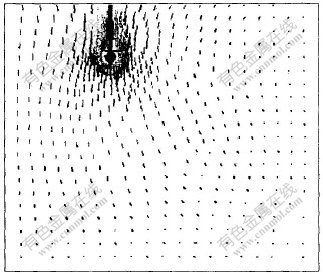
ͼ 8 ��λ��ʸ��ͼ(ǰ��ͼ)
Fig. 8 Direction of main displacement(front view)
�� 5 ̽ͷ����ʱ����������ε�Ӱ�췶Χ����С
Table 5 Sizes and scopes of nearby soil distortion influence when drill head penetrates
3 �� ��
a. ͨ������Ԫ����ó�ģ�������д�̽��Ӱ�췶ΧΪ614.5 mm��614.5 mm��310.0 mm��
b. ������Ԫ���������, ���õ��桪��Ӵ������еĸա���Ӵ�ģ���ܹ��Ϻõ�ģ����ֲ�ͬ���ʽӴ������, ���������Ͷ�����̽�������, ��������֤�����Ͷ�����̽����������ȷ�ԡ�
c. ���Ͷ�����̽����д�ɰ���Դ����ٽ����, ���������ʵ�ȵ�����, ���Ͷ�����̽���ߵ��ٽ���Ȼ�������������, ��ɰ�����ϴ��������ʵ�Ƚϴ�ʱ, �ٽ�������ӵķ����ԼӴ�, ���ǿ�����ϸʱ(2��ɰ)���ٽ�������ӵ����Ʋ�ͬ�ڽϴֿ������ٽ���ȡ� �������ʵ��Dr=0.40~0.80ʱ, ����ɰ���ٽ�����ɴ�С����Ϊ: 1��ɰ, 4��ɰ, 3��ɰ, 2��ɰ;
d. ͨ������Ԫ�����֪, ̽ͷ��ɰ��������ɰ��֮��, �������ʵ�ȴ��ɰ��̽ͷ��Χ�������������������, ��ɰ������ܼ�������¡��Ϳ���, ������һ�����, ����������ٽ���ȷ�Χ��ʱ, ̽ͷ������־ֲ�ԭ��Ӧ���ɳڻ��С, ���ڵ��͵ļ����ƻ�; ��������ȳ����ٽ���ȷ�Χʱ, ��ѹ������֧�����ʵ��С��ɰ, ���ٽ�ѹ��(��3)С, �������÷�Χ����, �ϸ���ѹ��������������, ���ٽ���������ܼ��л���֧�����ʵ�ȴ��ɰ, ���ٽ�ѹ����, ���ϸ���ѹ��Ӱ��ǿ��, ���, ���ٽ���ȴ���ѹ��ֵԶ����ʵ��С��ɰ��ѹ����
e. ������̽ͷ�ܱ߾��������, Ӧ����1��ɢ��������, Ӧ����3��ɢ�ʵ�����, �����������ʵ��Dr����������� ̽ͷ�ڲ�ͬ������N10��������, ���и���Ӧ���Ĵ�С����Χ�������Բ��
f. �ڵ����µ��ٽ���ȷ�Χ��, ̽ͷ�ڹ���ʱ, �������Լ��б���Ϊ����, ̽ͷ���볬���ٽ����֮��, ���Ź������������, ���IJ���Լ��Ӧ������, ��ʱ, ���л�����ʧȥ������λ, ��ѹ���������������á�
g. ͨ������Ԫ�����֪, ���Ͷ�����̽���ڼ�·�ź�̨�������д�ɰ�������ʵ���ǿ��еġ�
�����:
[1]����ǿ. �ػ�����ԭλ���Լ���[M].����:�й�����������,1996.
Tang Xian-qiang. Former Place Testing Technology in Foundation Project[M]. Beijing:China Railway Press, 1996.
[2]л����, ������, ���¸�, ��. ������̽ͨ����ָ��-����������Ӧ��[J]. �人ˮ��������ѧ(�˲�)ѧ��,1998,20(3):39-42.
XIE Shou-yi, XU Wei-ya, LIU De-fu, et al. A general index of dynamic penetration test-dynamic cone resistance and its application[J].Journal of University of Hydraulic and Electric(Yichang), 1998,20(3):39-42.
[3]��ɷ�, ������, ��ٻ, ��. ������̽�����ĸĽ����о�[J]. �人������ѧѧ��,2001,23(10):75-77.
SUN Cheng-fang, ZHANG Liang-jun, GU Qian, et al. A research on the innovated method of dynamic penetration test[J]. Journal of Wuhan University of Technology, 2001,23(10):75-77.
[4]���t��,���ʸ�,���ر�. ���նȺͶ�����̽��ǿ���ػ�����е�Ӧ��[J]. ������ѧ, 2004, 25(5): 839-842.
WANG Yi-wang, WANG Ren-gang, YAN Shao-bing. Application of dynamic rigidity and dynamic penetration to consolidated foundation test[J]. Rock and Soil Mechanics, 2004,25(5):839-842.
[5]¬�ջ�. ������̽���Լ�Ӧ��[J]. ������ѧԺѧ��(��Ȼ��ѧ��),2003,22(3):204-207.
LU Zhao-hui. Dynamic penetration test and its engineering application[J]. Journal of Jiaozuo Institute of Technology(Natural Science), 2003,22(3):204-207.
[6]¬�ջ�.ij�Ż�������̽����[J].����������ѧѧ��(��Ȼ��ѧ��),2003,23(2):14-17.
LU Zhao-hui. Dynamic penetration test on a bridge base[J]. Journal of Anhui University of Science and Technology(Natural Science), 2003,23(2):14-17.
[7]���°�, ����. ��··�������붯����̽�����о�[J]. �й���ҵ��ѧѧ��,2002,31(4):358-362.
YANG Xin-an, ZHOU Qing. Railway embankment settlement and dynamic penetration test[J]. Journal of China University of Mining & Technology, 2002,31(4):358-362.
[8]�ǿ. Ӧ��AutoCAD���ƶ�����̽��������̽�ɹ�ͼ[J]. ����ѧ��,1999,21(1):110-112.
LI Jian-qiang. Application of auto CAD to plot diagram for achievements in dynamic penetration test and static sounding[J]. Journal of the China Railway Society, 1999,21(1):110-112.
[9]������. ���Ͷ�����̽���������������������ij����о�[J]. �����ѧ����,1996(3),16-18.
LIU Jing-xian. Primary study of heavy-duty dynamic penetration test to assess the bearing capacity of plain fill[J]. Investigation Science Technology, 1996(3),16-18.
[10]������, ���ػ�, ������. PANDA�����������ڹ�·�е�Ӧ��[J]. ɽ����ͨ�Ƽ�,2001,144(2):53-55.
CHANG Ai-guo, DU Rong-hua, FAN Peng-fei. The application of PANDA dynamic penetration device to highway[J]. Shanxi Science & Technology of Communications, 2001,144(2):53-55.
[11]GB50021-2001,�������̿���淶,[S].
GB50021-2001, Code for Investigation of Geotechnical Engineering[S].
[12]Su S F, Liao H J. Cavity expansion and cone penetration resistance in anisotropic clay[J]. Journal of the Chinese Institute of Engineers, 2001,24(6): 659-671.
[13]Ma Shu-Zhi, The FEM simulation of dynamic penetration process of CPTU[J]. Rock and Soil Mechanics, 2002,23(4):478-481.
[14]Yu H S, Mitchell J K. Analysis of cone resistance: review of methods[J]. Journal of Geotechnical. and Geoenvironmental Engineering, ASCE, 1998, 124(2):140-149.
[15]��ά��. ɰ�����о�����̽�����о�[D]. ��ɳ:��ɳ����ѧԺ��ľ����ѧԺ,1987.
CHEN Wei-jia. Study on Mechanism in Sand Static Penetrating Test[D]:Changsha:Civil Engineering Department, Changsha Railway University, 1987.
[16]���Ӿ�. ���Ա߽�궨���еľ�����̽����[D]:�ɶ�:���Ͻ�ͨ��ѧ��ľ����ѧԺ,1988.
QIU Yan-jun. Static Penetrating Mechanism in the Soft Border Fixed Point Jug[D]. Chengdu:Civil Engineering Department, South-west Transportation University, 1988.
[17]���Ӿ�. ������̽�����о�[J]. ���Ͻ�ͨ��ѧѧ��,1993,91(2):46-52.
QIU Yan-jun. Study on static penetrating mechanism[J]. Journal of South-West Transportation University,1993,91(2): 46-52.
�ո�����:2005-03-04
������Ŀ: �㶫ʡ��ͨ�����л���������Ŀ(2002-013 )
�����:������(1957-), ��, �㶫������, ������ʦ, ���¹�·���̵ļ���
������ϵ��: ������, ��, ������ʦ; �绰: 13902301794

