
DOI: 10.11817/j.issn.1672-7207.2019.11.022
水力采集过程中单球形颗粒起动试验研究
陈宇翔,熊宏,程辉,陈洋
(中国科学院 深海科学与工程研究所,海南 三亚,572000)
摘要:为定量研究粗颗粒起动过程中流场和颗粒的相互影响,采用高速摄像与PIV (particle image velocimetry)等试验手段,研究颗粒粒径d、采集管道距底面高度h和颗粒密度 对单球形颗粒被采集管道抽吸脱离底面的起动流速和流场分布的影响。研究结果表明:颗粒起动Fr数和颗粒起动Re数随着h/d,d/D和/
对单球形颗粒被采集管道抽吸脱离底面的起动流速和流场分布的影响。研究结果表明:颗粒起动Fr数和颗粒起动Re数随着h/d,d/D和/ 增大而增大,对于大颗粒采集,h不宜超过1.75d;球形颗粒会使颗粒下半部的流场流速降低,导致更大的速度梯度和压力梯度力;颗粒起动过程与密度比有关,玻璃球起动过程是由采集管投影中心沿着近似螺旋线运动至投影边缘并绕着轴线旋转后被提升,而尼龙球是直接从正下方被吸入采集管内。
增大而增大,对于大颗粒采集,h不宜超过1.75d;球形颗粒会使颗粒下半部的流场流速降低,导致更大的速度梯度和压力梯度力;颗粒起动过程与密度比有关,玻璃球起动过程是由采集管投影中心沿着近似螺旋线运动至投影边缘并绕着轴线旋转后被提升,而尼龙球是直接从正下方被吸入采集管内。
关键词:固液两相流;起动流速;水力采集;流场分析;PIV
中图分类号:TD807 文献标志码:A 开放科学(资源服务)标识码(OSID)
文章编号:1672-7207(2019)11-2831-09
Experimental study on the incipient motion of a single spherical particle in hydraulic collecting
CHEN Yuxiang, XIONG Hong, CHENG Hui, CHEN Yang
(Institute of Deep-sea Science and Engineering, Chinese Academy of Sciences, Sanya 572000, China)
Abstract: To study the interaction between flow and particle during the start of hydraulic lifting a coarse of particle, the experiment of lifting off a single spherical particle by collecting tube was carried out. The effects of particle size d, bottom clearance h and particle density  on flow field and particle starting velocity with the method of high-speed imaging and PIV (particle image velocimetry) were investigated. The results show that particle Froude number Fr and particle Reynolds number Re increase with the increase of ratio of h/d, d/D and /
on flow field and particle starting velocity with the method of high-speed imaging and PIV (particle image velocimetry) were investigated. The results show that particle Froude number Fr and particle Reynolds number Re increase with the increase of ratio of h/d, d/D and / , and profitable h is less than 1.75d for the large particle. The presence of spherical particle reduces the flow velocity in the lower half of the sphere, resulting in greater velocity gradient and pressure gradient force. The ratio of density is of significance during the lifting process of particle. The glass sphere moves along the approximate spiral from the projection center of the tube to the edge and rotates around the tube axis, and then is lifted, while the nylon sphere is sucked and collected directly from the bottom below the tube.
, and profitable h is less than 1.75d for the large particle. The presence of spherical particle reduces the flow velocity in the lower half of the sphere, resulting in greater velocity gradient and pressure gradient force. The ratio of density is of significance during the lifting process of particle. The glass sphere moves along the approximate spiral from the projection center of the tube to the edge and rotates around the tube axis, and then is lifted, while the nylon sphere is sucked and collected directly from the bottom below the tube.
Key words: solid-liquid two phase flow; starting velocity; hydraulic collecting; flow field analysis; PIV (particle image velocimetry)
随着陆地资源的大量消耗,人类对于金属资源需求正转向深海,深海采矿被认为是人类可持续发展的关键途径[1-5]。深海蕴藏着丰富的多金属结核等矿产资源[6-7],大部分多金属结核作为独立个体松散地“嵌在”深海底表面稀软的深海沉积物中,直径一般为2~10 cm[8]。商业开采深海多金属结核颗粒必须达到较高的扫掠效率[9],首先必须研究设计高效、低能耗且环保的粗颗粒采集装置。众多学者研究了水力采集、机械采集等采集方法。赵松年等[10]发现水力采集比机械采集效率更高,而且水力采集对复杂地形有更高的适应性,对海底环境的干扰更小。但是水力采集非常复杂,与颗粒直径、底部高度、采集头结构、流量等许多因素有关。OEBIUS等[11-12]开展了一系列水力集矿实验室试验,分析了多金属结核从海底沉积物上层的稀软层脱离的过程。GRUPE等[13]在实验室条件下测量了多金属结核样品在水力采集过程中从沉积物中脱出所需要的升力。HONG等[14-15]在实验室建立了用于模拟多金属结核采集过程的透明水槽,开展了系列试验研究水射流流量、集矿装置行进速度、离地高度等对采集效率的影响,并研究采集流场底部压力分布与采集效率的关系。YANG等[16]通过实验发现具有合适大小的集矿装置可以获得较高的矿石采集率,且吸入较少的沉积物。陈新明等[17]通过实验研究了采集效率和其他关键因素的关系。夏剑峰等[18]介绍了一种用于深海采矿的全水力集矿机并进行了大量的试验。简曲等[19]通过水下模拟采集结核试验研究了机械结构和射流等参数对采集效率的影响。前人对于粗颗粒水力采集的研究大多集中于颗粒运动本身的研究,对于与其强烈耦合的流场研究较少。LIM等[20]通过CFD分析了深海中收集锰结核时从收集装置排出的尾流的流场特性。ZHAO等[21-22]通过实验研究了固定在底面的单球形颗粒受到的流体作用力和底面高度、流速、采集管的移动速度对集矿的影响,并用数值方法计算了采集流场。XIONG等[23]用CFD-DEM数值方法研究了颗粒脱离地面吸入采集管道的过程和流场变化,但缺少试验流场的真实表征。本文针对以上研究不足,利用PIV技术测量粗颗粒水力采集过程中的流场,研究颗粒和流场的相互作用。本文所定义的颗粒起动流速为在一定采集流速下,颗粒刚好能脱离底面,被吸入采集管中时的最小采集流速。
1 试验装置
试验在中科院深海科学与工程研究所水力采集两相流动试验水槽中进行,图1所示为试验装置图,水槽长2.0 m,宽1.5 m,高1.0 m。整个实验系统包括采集管道、软管、水泵、电磁流量计和压力变送器等。通过水泵抽吸,水槽中的水从采集管道被吸入,通过软管,经过水泵和电磁流量计,最后经软管流入水槽,形成循环。通过变频器控制电机调节水泵转速,从而调节流量,同时,电磁流量计和压力变送器可分别记录管道中的流量和压力。用带孔隔板将试验区与回流区分开,减小出水对试验区影响,同时在管道出口处添加多层滤网,减少对试验区的扰动。
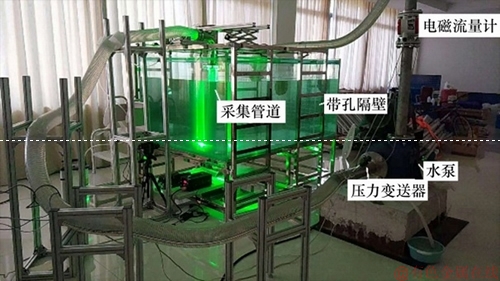
图1 试验装置
Fig. 1 Overall experimental setup
试验采用时序粒子图像速度场测试系统(time-resolved particle image velocimetry,TR-PIV),包括连续照明激光器、高速摄像机和计算机等,相机最大分辨率为2 048×2 048,最高拍摄帧率为675 000 帧/s。高速摄像机和连续激光器配合,可以在记录颗粒运动的同时对流场进行高频采样,得到流场随时间的变化。
2 颗粒起动时流动特征数研究
粗颗粒的起动流速对采集效率和能耗等有极大影响:采集流速过小,无法采集颗粒,采集流速过大,则会浪费能量和降低效率。
2.1 理论分析
单球形颗粒的起动流速 为[14]
为[14]
= (1)
(1)
式中: 和
和 分别为颗粒和流体的密度;
分别为颗粒和流体的密度; 为重力加速度;
为重力加速度; 为管道入口到底面的距离(底部高度);d为颗粒的直径;
为管道入口到底面的距离(底部高度);d为颗粒的直径; 为采集管道的内径;
为采集管道的内径; 为流体的动力黏度。通过量纲一理论分析,最终可得
为流体的动力黏度。通过量纲一理论分析,最终可得
 (2)
(2)
式中: 为起动费劳德数(Fr数),表示颗粒惯性力和重力的比值;
为起动费劳德数(Fr数),表示颗粒惯性力和重力的比值; 为颗粒与流体密度的比值;
为颗粒与流体密度的比值; 为起动雷诺数(Re数);
为起动雷诺数(Re数); 为采集管道离底面高度与颗粒直径的比值;
为采集管道离底面高度与颗粒直径的比值; 为采集管道内径与颗粒直径的比值。
为采集管道内径与颗粒直径的比值。
2.2 试验工况和参数
试验所用的颗粒结核用玻璃球和尼龙球代替,采集管道用有机玻璃管模拟。模型参数具体如下:玻璃球密度 和尼龙球密度
和尼龙球密度 分别为2 450 kg/m3和1 145 kg/m3;试验所用玻璃球直径
分别为2 450 kg/m3和1 145 kg/m3;试验所用玻璃球直径 有4种,即20,30,40和50 mm;尼龙球直径
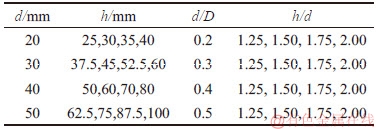
有4种,即20,30,40和50 mm;尼龙球直径 只选用1种,即40 mm;采集管道内径D为100 mm,壁厚t为5 mm。球形颗粒为自由布置在底面上,采集管道距离底面的距离根据h/d变量进行变化,本次试验有3个可控变量,即底部高度、颗粒直径和颗粒密度,可通过控制变量分析实验数据。具体16种工况如表1所示。
只选用1种,即40 mm;采集管道内径D为100 mm,壁厚t为5 mm。球形颗粒为自由布置在底面上,采集管道距离底面的距离根据h/d变量进行变化,本次试验有3个可控变量,即底部高度、颗粒直径和颗粒密度,可通过控制变量分析实验数据。具体16种工况如表1所示。
表1 试验工况
Table 1 Test conditions
2.3 结果和讨论
颗粒起动时根据流量计测出的流量Q通过无因次化转化成起动Fr数,同时对可控变量进行无因次化。图2所示为/=2.45时,起动流动特征数和参数h/d和d/D的变化关系。由图2(a)可见:对于特定d/D,h/d越大,即采集管道越高,颗粒的起动流速越大,水泵所输出的功率也就越大,对于小颗粒,颗粒起动Fr数与h/d接近线性关系,但对于大颗粒,当h/d超过1.75时,颗粒起动Fr数会明显增大,说明对于大颗粒的采集,采集管道距底面的距离不应超过1.75d,否则所需要的采集流速会大大增加,导致水泵功率大幅增加,采集效率会降低。对于特定h/d,颗粒直径越大,颗粒起动Fr数也越大,这是因为颗粒水中重力与直径呈3次方关系。
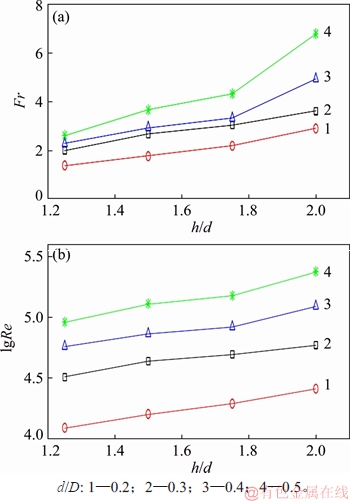
图2  /
/ =2.45时起动流动特征数与h/d和d/D的关系
=2.45时起动流动特征数与h/d和d/D的关系
Fig. 2 Relationship between dimensionless number of flow characteristics among h/d and d/D with /=2.45
从图2(b)可见:对于特定d/D,h/d越大即底面高度越高,颗粒的起动流速越大。颗粒起动Re数与h/d近似呈线性关系。对于特定h/d,颗粒直径越大,颗粒起动Re数也越大。
图3所示为起动流动特征数和参数h/d和颗粒流体密度比/的变化关系。从图3可见:颗粒起动Fr数与颗粒流体密度比有一定关系。对于特定h/d,颗粒密度越大,颗粒起动Fr数也越大,这是因为颗粒密度越大,水中重力越大,所需要的流体作用力越大,流速越大。对于尼龙球和玻璃球,颗粒起动Fr数随h/d增大而增大,呈现相同的增长趋势,颗粒起动Re数与颗粒流体密度比的关系也呈现相同的增长趋势。

图3 起动时流动特征数与h/d和密度比/的关系
Fig. 3 Relationship between dimensionless number of flow characteristics among h/d and /
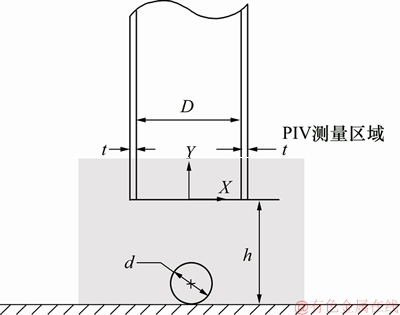
图4 实验测量区域示意图
Fig. 4 Schematic of measurement region
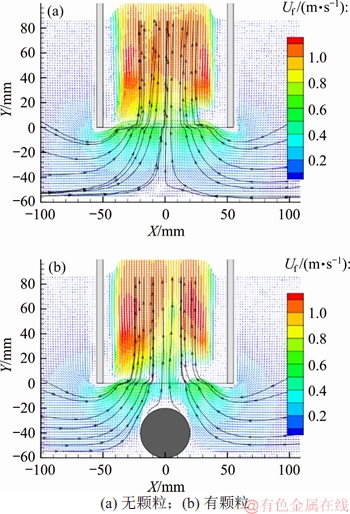
图5 时均流场和流线
Fig. 5 Time-averaged velocity field and streamline
3 颗粒起动流场研究
为研究不同密度颗粒的起动流场,对h=60 mm,d=40 mm的玻璃球和尼龙球的起动过程进行PIV测量。激光片光源照射通过采集管的轴线,将示踪粒子照亮,相机正对激光照射面。高速摄像机拍摄两帧相隔时间很短的示踪粒子分布图像,图像经过计算机后处理可获得瞬态流场速度分布,以此研究玻璃球和尼龙球2种不同密度的球形颗 粒起动的方式。
3.1 PIV模型和设置
激光面从水槽底部向上照射,通过采集管轴线,主要研究的流场范围为采集管入口及以下至底面的轴截面部分,相机拍摄区域为240 mm×180 mm,拍摄区域边缘光强不够,同时与测量区域关联不大,因此设置测量区域为200 mm×140 mm,以管道入口中心为原点,水平向右为X轴,竖直向上为Y轴。试验测量区域示意图如图4所示。
3.2 PIV流场验证和对比
试验时通过管道的流量Q设置为28.4 m3/h,实际管道内平均流速 为1 m/s。拍摄200张图片,对这200个样本做时间平均,求得时均流场。然后,截取管道高度Y=80 mm处的流速分布与平均流速进行对比,图5所示为时均流场和流线,其中,Uf为流体速度。由于靠近采集管端口部分,PIV无法测出速度,导致流线并不流畅,存在突变,因此,主要研究采集管以外的流场。从图5可见:球形颗粒的起动与采集管下部流场关系更紧密。
为1 m/s。拍摄200张图片,对这200个样本做时间平均,求得时均流场。然后,截取管道高度Y=80 mm处的流速分布与平均流速进行对比,图5所示为时均流场和流线,其中,Uf为流体速度。由于靠近采集管端口部分,PIV无法测出速度,导致流线并不流畅,存在突变,因此,主要研究采集管以外的流场。从图5可见:球形颗粒的起动与采集管下部流场关系更紧密。
图6所示为管道中PIV测得的截面流速和从流量计读取的平均流速的对比。从图6可见:在管道中部,由于有机玻璃管视野较好,速度与平均速度接近,但靠近管壁处,由于边界层作用,越靠近管壁,速度越小。管壁被激光照亮而影响附近的示踪粒子在拍摄图像上的识别,因此,管壁附近的流场速度求解会受到影响。
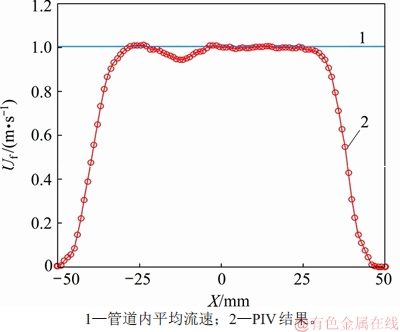
图6 平均流速和PIV结果比较
Fig. 6 Comparison of velocity between PIV result and average velocity
将直径为d=40 mm的玻璃球放置在原点正下方,此时给定采集流量Q=28.4 m3/s,比较Y分别为-10,-20,-30,-40和-50 mm处流场,同时与无颗粒时的流场进行比较。
图7所示为不同高度处有无颗粒时流场的对比。由图7可见:采集流场中存在颗粒和不存在颗粒2种情况,对于距离颗粒较远处的流场,两者较为接近。图8所示为采集流场中存在颗粒和不存在颗粒时不同高度处流速的对比。由图8可见:颗粒周围的流场流速因颗粒的存在都不同程度地减小,除了颗粒占据位置处的流体速度为0外,颗粒对于颗粒底部的流场影响更大,即Y/d=-5/4处的速度差异最大,这是因为颗粒存在对颗粒底部的流体起到极大的阻碍作用,颗粒底部周围流速小,流体因为存在速度梯度产生了压力梯度,使颗粒受到向上的流体作用力。
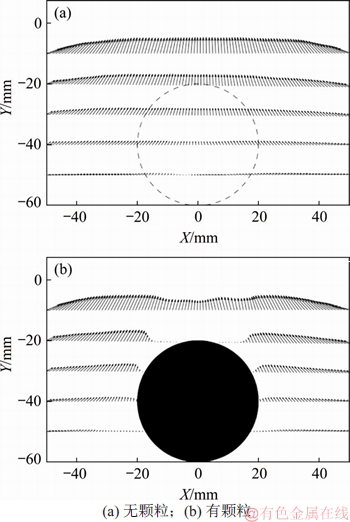
图7 不同高度处的流速分布
Fig. 7 Comparison of velocity fields at different heights
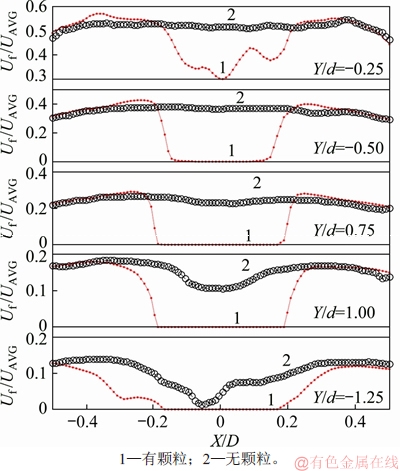
图8 无因次化速度在不同高度处的比较
Fig. 8 Comparison of dimensionless speeds at different heights
3.3 颗粒起动过程流场研究
以直径d=40 mm的玻璃球为研究对象,观察起动试验中颗粒脱离底面的过程。
玻璃球开始静止在采集管正下方,随后小幅度运动,沿着原点来回移动,幅度增大,直至玻璃球在圆管投影边界处旋转,玻璃球突然起动,脱离底面向上运动,直至进入采集管。玻璃球起动脱离底面并不是直接从采集管中心进入的,这是因为此时的流速不足以直接让玻璃球起动,由于流场受到扰动产生湍流,使玻璃球从原点投影点沿近似平面螺旋线运动至采集管投影边界并围绕管轴旋转,与流体产生更大的速度差,同时玻璃球自身做旋转,提供马格努斯力,然后脱离底面。
图9所示为玻璃球启动过程中的流场变化。从图9(a)可见:玻璃球起动瞬间,此时玻璃球还在底面上,位于最左端。从图9(b)可见:0.05 s后,玻璃球稍微脱离底面,但是竖直方向移动距离很少。从图9(c)可见:0.10 s后,玻璃球离开底面约为2 mm,同时玻璃球向采集管中心移动。从图9(d)可见:0.15 s后。玻璃球离开底面约为5 mm,由于玻璃球靠近采集管,管道入口流场速度增大。
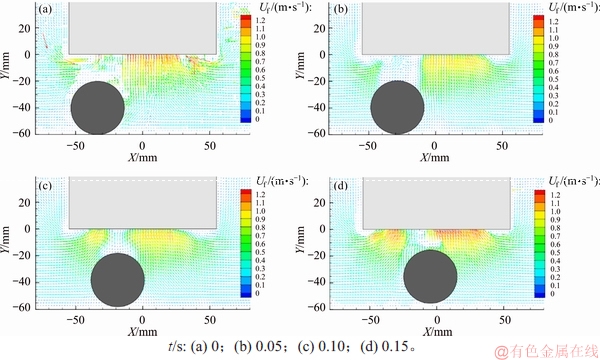
图9 玻璃球起动过程瞬态流场
Fig. 9 Transient flow field while glass ball starts
图10所示为玻璃球起动上升过程中产生的旋涡。因为颗粒速度较快,颗粒雷诺数大,流经颗粒两侧的流体会发生边界层脱离,会生成旋涡,类似于固定圆球的扰流现象。
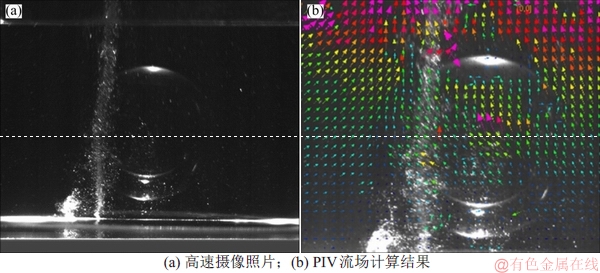
图10 玻璃球起动过程中的旋涡
Fig. 10 Generation of a vortex while glass ball starts
对于玻璃球,密度较大,较小的流速不足以使玻璃球直接起动,因此,玻璃球从采集管投影中心位置向外运动,运动轨迹近似螺旋线,直至采集管投影边缘,此时,玻璃球在采集管投影边缘旋转,玻璃球受到向上的流体作用力来源于3个部分:1) 由于靠近采集管的流速大,靠近底面流速小,因此,底面处的压力小,上方的压力大,会形成压力梯度;2) 玻璃球旋转,类似于水平方向上的圆球扰流现象,玻璃球产生上下波动的升力;3) 玻璃球沿着投影管壁旋转,类似于自身做旋转运动,产生马格努斯效应,玻璃球沿底面滚动,上半部分速度快,下半部分速度慢,因此,产生1个向上的马格努斯力。这3个部分力会使得玻璃球在旋转时突然起动,脱离底面。
对于尼龙球,密度与水的接近,在较小的流速下,尼龙球直接起动脱离底面,竖直向上运动,水平方向基本无运动,由此可见,尼龙球起动的流体作用力主要来自于压力梯度力。图11所示为尼龙球起动过程的流场速度变化。由于尼龙球不是透明的,尼龙球上方流场无法测出。
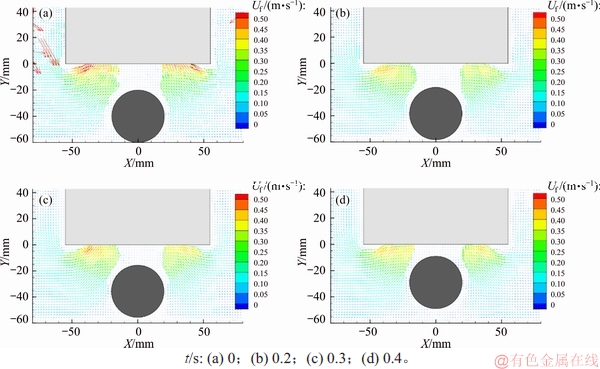
图11 尼龙球起动过程瞬态流场
Fig. 11 Transient flow field while nylon ball starts
图12所示为尼龙球起动时X=30 mm处,Y=-50至-5 mm方向上的无因次化速度分布,为此时管道中的平均流速。由图12可见:该处流场受尼龙球起动影响变化较小,流速分布为沿Y轴正向增大,并且流速随时间变化较小,表明尼龙球起动过程中基本只有竖直方向运动,水平方向运动较小。另外,曲线1在Y/d= -1.25处相对其他3条曲线有较大波动,这是因为t=0 s时尼龙球是静止的,与流体相对速度较大,尼龙球绕流速度大,从尼龙球上脱落的旋涡较紊乱,速度波动较大,之后尼龙球脱离底面被提升,与流体相对速度较小,尼龙球绕流速度小,小球附近的流场变化较小。

图12 X=30 mm不同高度处的流速比较
Fig. 12 Comparison of velocity with different heights at X=30 mm
4 结论
1) 定义了颗粒起动时的流动特征数,表征颗粒在流体中起动情况的量纲一数。其中颗粒起动Fr数和颗粒起动Re数随着h/d,d/D和/增大而增大。对于大颗粒的采集,采集管道距底面的距离不宜超过1.75d。
2) 颗粒周围的采集流场流速因颗粒的存在都有不同程度的减小,但对于颗粒下半部的流场影响更大,流场会受到极大的阻碍,流速更低,导致产生更大的速度梯度和压力梯度力。
3) 球形颗粒起动过程与密度比有关,玻璃球起动过程是玻璃球自采集管正下方沿着近似螺旋线运动直至到采集管投影边界绕着轴线旋转。玻璃球起动过程中受到的流体作用力来自3个方面:竖直方向上的速度梯度引起的压力梯度力、玻璃球沿着底面滚动引起的马格努斯力和玻璃球扰流引起的波动升力。
4) 尼龙球起动过程是直接从正下方起动吸入采集管内,尼龙球受到的流体作用力主要来自于压力梯度力,距离尼龙球稍远的地方,流场受尼龙球起动影响变化较小。
参考文献:
[1] MERO J L. The mineral resources of the sea[M]. Netherlands: Elsevier, 1965: 242-272.
[2] SHARMA R. Deep-sea mining: economic, technical, technological, and environmental considerations for sustainable development[J]. Marine Technology Society Journal, 2011, 45(5): 28-41.
[3] CHUNG J S. Deep-ocean mining technology: development II[C]//Proceedings of the 6th ISOPE Ocean Mining Symposium. Changsha, China: ISOPE, 2005: 1-6.
[4] CHUNG J S. Deep-ocean mining technology III: developments[C]//Proceedings of the 8th ISOPE Ocean Mining Symposium. Chennai, India: ISOPE, 2009: 1-7.
[5] VOLKMANN S E, KUHN T, LEHNEN F. A comprehensive approach for a techno-economic assessment of nodule mining in the deep sea[J]. Mineral Economics, 2018, 31(3): 319-336.
[6] 高亚峰. 海洋矿产资源及其分布[J]. 海洋环境保护, 2009(1): 13-15.
GAO Yafeng. Marine mineral resources and their distribution[J]. Marine Environmental Protection, 2009(1): 13-15.
[7] 李伟, 陈晨. 海洋矿产开采技术[J]. 中国矿业, 2003, 12(1):44-46.
LI Wei, CHEN Chen. Extraction technology of ocean mining[J]. China Mining Magazine, 2003, 12(1): 44-46.
[8] 刘少军, 刘畅, 戴瑜. 深海采矿装备研发的现状与进展[J]. 机械工程学报, 2014, 50(2): 8-18.
LIU Shaojun, LIU Chang, DAI Yu. Status and progress on researches and developments of deep ocean mining equipments[J]. Journal of Mechanical Engineering, 2014, 50(2): 8-18.
[9] BROCKETT F H, HUIZINGH J P, JAMES A R. Updated analysis of the capital and operating costs of a polymetallic nodule deep ocean mining system developed in the 1970s[C]//Tagungsbericht des Workshops der ISA. Chennai, India: ISA, 2008: 46-65.
[10] 赵松年, 刘峰. 德国深海采矿技术的研究[J]. 金属矿山, 1995(6): 14-17.
ZHAO Songnian, LIU Feng. Study of deep-sea mining technique in Germany[J]. Metal mine, 1995(6): 14-17.
[11] OEBIUS H U, BECKER H J, ROLINSKI S, et al. Parametrization and evaluation of marine environmental impacts produced by deep-sea manganese nodule mining[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 2001, 48(17): 3453-3467.
[12] BECKER H J, GRUPE B, OEBIUS H U, et al. The behaviour of deep-sea sediments under the impact of nodule mining processes[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 2001, 48(17): 3609-3627.
[13] GRUPE B, BECKER H J, OEBIUS H U. Geotechnical and sedimentological investigations of deep-sea sediments from a manganese nodule field of the Peru Basin[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 2001, 48(17): 3593-3608.
[14] HONG S, CHOI J S, KIM J H, et al. Experimental study on hydraulic performance of hybrid pick-up device of manganese nodule collector[C]//Proceedings of the 3rd ISOPE Ocean Mining Symposium. Goa, India: ISOPE, 1999: 69-77.
[15] HONG S, CHOI J S, KIM J H, et al. A note on design and operation of waterjet nodule lifter of manganese nodule collector[J]. International Journal of Offshore and Polar Engineering, 2001, 11(3): 237-239.
[16] YANG Ning, TANG Hongping. Several considerations of the design of the hydraulic pick-up device[C]//Proceedings of the 5th ISOPE Ocean Mining Symposium. Tsukuba, Japan: ISOPE, 2003: 119-122.
[17] 陈新明, 简曲. 深海采矿复合式集矿方法的试验研究[J]. 矿业研究与开发, 1996, 16(4): 1-4.
CHEN Xinming, JIAN Qu. An experimental study on hybrid collection method for deep-sea nodule mining[J]. Mining Research and Development, 1996, 16(4): 1-4.
[18] 夏剑锋, 王贵满. 深海采矿水力式集矿模型机[J]. 矿冶工程, 1996, 16(4): 18-21.
XIA Jianfeng, WANG Guiman. The hydraulic model miner for deep sea mining[J]. Mining and Metallurgical Engineering, 1996, 16(4): 18-21.
[19] 简曲, 王明和. 深海采矿集矿机的设计[J]. 矿业研究与开发, 1998(1): 33-36.
JIAN Qu, WANG Minghe. Design of nodule collector for deep ocean mining[J]. Mining Research and Development, 1998(1): 33-36.
[20] LIM S J, KIM J W, JUNG S T, et al. Deep seawater flow characteristics around the manganese nodule collecting device[J]. Procedia Engineering, 2015, 116: 544-551.
[21] ZHAO Guocheng, XIAO Longfei, LU Haining, et al. A case study of hydraulic collecting a single spherical particle[C]//Proceedings of the 27th International Ocean and Polar Engineering Conference. San Francisco, California, USA: ISOPE, 2017: 30-38.
[22] ZHAO Guocheng, XIAO Longfei, ZHAO Weijie, et al. Investigation on vertical incipient motion of spherical particles in hydraulic collecting[C]//Proceedings of the 28th International Ocean and Polar Engineering Conference. Sapporo, Japan: ISOPE, 2018: 160-167.
[23] XIONG Hong, CHEN Yuxiang, YANG Ning, et al. Numerical study on settling and floating movements of a sphere particle flowing in a vertical pipe[C]//Proceedings of the 28th International Ocean and Polar Engineering Conference. Sapporo, Japan: ISOPE, 2018: 176-182.
(编辑 秦明阳)
收稿日期: 2018 -12 -24; 修回日期: 2019 -02 -10
基金项目(Foundation item):海南省重大科技计划项目(ZDKJ2016014);国家重点研发计划项目(2016YFC0304100)(Project(ZDKJ2016014)supported by the Major Science and Technology Program of Hainan Province; Project(2016YFC0304100) supported by the National Key Research & Development Program of China)
通信作者:熊宏,工程师,从事深海资源开发技术研究;E-mail: xiongh@idsse.ac.cn

