新型出铝车机电液协同仿真与有限元分析
李力1, 2,温荣耀1,陈铭2,张卫东3
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 深海矿产资源开发利用技术国家重点实验室,湖南 长沙,410012;
3. 凯瑞重工,湖南 长沙,410013)
摘要:以用于冶炼生产中自动运输与装卸电解铝的新型出铝车为研究对象,基于多刚体理论,利用ADAMS仿真软件,建立出铝车多刚体动力学模型,采用AMESIM仿真软件,构建其液压系统与控制模型,突破ADAMS与AMESIM软件的接口技术,建立起出铝车机电液协同仿真模型,并开展爬10%坡的协同仿真。同时,基于有限元理论,利用ANSYS软件,建立新型出铝车车架和门架的有限元模型,并以出铝车爬坡动力学仿真结果为基础,开展车架和门架的有限元分析。研究结果表明:出铝车的运动学和动力学结果反映了车体的实际行驶状况;铝车车架和门架的强度和刚度满足设计要求。
关键词:新型出铝车;多刚体动力学;协同仿真;有限元分析
中图分类号:TF35 文献标志码:A 文章编号:1672-7207(2014)07-2201-08
Co-simulation of mechanical electrical hydraulic combined system and finite element analysis for new tapping vehicle
LI Li1, 2, WEN Rongyao1, CHEN Ming2, ZHANG Weidong3
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. State Key Laboratory of Deep Sea Mineral Resources Development and Utilization Technology,
Changsha 410012, China;
3. Carrie Heavy Industry Machinery Limited Company, Changsha 410013, China)
Abstract: By using ADAMS software based on multi-rigid-body dynamics theory, the multi-rigid-body dynamics model of new tapping vehicle transporting, loading and unloading electrolytic aluminium was built. Its hydraulic and controlling models were established by utilizing AMEsim software. Based on solving the interface technology between ADAMS and AMEsim software, the co-simulation model of the mechanical-electronic-hydraulic combined system for the new tapping vehicle was set up, and the co-simulation of climbing 10% slope was completed. Moreover, based on finite element theory, the finite element models of the carriage and the door frame in the new tapping vehicle were built. And according to the vehicle's dynamics results got from the previous co-simulation, the finite element analysis for the carriage and the door frame were completed by employing ANASYS software. The results of the co-simulation show that the tapping vehicle's kinematics and dynamics results have reflected its actual driving situation. The results of the finite element results show that the strength and stiffness of the carriage and the door frame have satisfied the design requirements.
Key words: new tapping vehicle; multi-rigid-body dynamics; co-simulation; finite element analysis
新型出铝车是一种用于冶炼生产中自动运输与装卸电解铝的轮式车辆。它将替代当前在金属冶炼运输中普遍采用的天车、叉车或吊车等多种装备的需同时使用的状况,是目前铝业生产最先进的运输装备,其开发对我国铝业生产实现自动化作业具有重要意义。新型出铝车为机械、液压和控制一体化系统,属于重载机械,且由于出铝工艺,车体结构右侧存在大尺度缺口,由此,新型出铝车在运输过程中车体受力状况是十分恶劣的[1],车体强度及刚度分析显得尤为重要。传统的车辆动载荷计算方法是先算出静载荷,再乘于一定的动载荷系数[2]。目前广泛采用虚拟样机方法开展的车辆特性分析主要集中于单体的机械系统研究。常绿[3]利用ADAMS开展了矿用自卸车仿真研究。但由于车辆是机械、液压与控制一体化,各系统之间是相互耦合与影响的,单独系统仿真将会与机电液系统产生偏差,这就要求对机电液系统进行协同仿真。李江波等[4]采用多刚体动力学仿真软件ADAMS与液压仿真软件EASY5开展了大型模锻液压机联合仿真。在此,本文作者采用是多刚体动力学仿真软件ADAMS与多学科领域复杂系统仿真软件AMEsim协同仿真的虚拟手段,对新型出铝车运输过程中受力最恶劣的爬坡工况进行仿真分析,获知新型出铝车性能,并以获得的动力学参数为基础,开展车架和门架的有限元分析,从而为新型出铝车开发提供技术支持。
1 出铝车建模
1.1 多刚体理论简介
多刚体系统动力学理论采用拉格朗日方程方法,建立系统动力学方程。选取系统内每个刚体质心在惯性参考系中3个直角坐标和方位的3个欧拉角作为笛卡儿广义坐标,即qi=[x, y, z, ψ, θ, φ]iT,q=[q1T, q2T, …, qnT]T。用带乘子的拉格朗日方程处理具有多余坐标的完整约束系统或非完整约束系统,导出以笛卡儿广义坐标为变量的运动学方程。
拉格朗日乘子法所建立系统方程[5-7]:
 (1)
(1)
完整约束方程:
 (2)
(2)
非完整约束方程:
 (3)
(3)
式中:T为系统动能;q为系统广义坐标矩阵;Q为广义力矩阵;ρ为对应于完整约束的拉氏乘子矩阵;μ为对应于非完整约束的拉氏乘子矩阵。
1.2 多刚体动力学模型和虚拟样机建立
将出铝车三维图导入多刚体动力学仿真软件ADAMS/View中。轮胎采用Fiala模型,其为简化轮胎理论导出的无量纲解释式[8-10],建立起出铝车多刚体动力学模型和虚拟样机,如图1所示。其中,全车具有旋转副(74个)、移动副(17个)、固定副(2个)、位移驱动和力矩驱动(31个)。
在ADAMS/View中,建立坡度10%的路面模型,其中,坡长为45.22 m,水平距离为135 m,垂直高度为4.5 m,坡顶面长15 m。将坡度10%路面模型导入出铝车多刚体动力学模型中,从而,建立出铝车爬坡多刚体动力学仿真模型。

图1 出铝车三维多刚体动力学模型和虚拟样机
Fig. 1 Multi-rigid body dynamic model and virtual prototype of tapping vehicle
1.3 液压与控制模型建立
采用AMEsim中的液压库、机械库,控制库等模块[11],开展出铝车液压与控制系统建模与仿真。
根据出铝车液压系统原理图,出铝车驱动系统为第1排和第4排轮胎驱动。前后半车液压系统回路相同,均由轮胎泵-马达系统和悬挂油缸系统组成。在AMESim软件平台上,采用液压库、机械库,建立出铝车前半车和后半车液压仿真模型,同时,考虑在坡面转折处悬挂系统应使各排轮胎与路面有良好的相互作用,利用控制库,施加PID控制至悬挂油缸,从而建立起出铝车前半车和后半车液压系统的AMEsim液压与控制仿真模型,轮胎泵-马达系统见图2中左部分,悬挂油缸系统见图2中右部分。
1.4 机电液协同模型建立
在ADAMS软件中,设置出铝车工作状态变量(36个),其中,输入变量为轮胎驱动力矩(8个)m1~m8、悬架油缸位移(8个)x1~x8,输出变量为轮胎角速度(8个)ω1~ω8、悬架油缸力(8个)f1~f8。AMESim液压系统由2个变量泵驱动,通过马达输出扭矩,通过油缸输出位移,输出的扭矩和位移作为ADAMS的力矩驱动和位移驱动;ADAMS测量到的轮胎角速度和油缸受力作为反馈输入到AMESim液压系统的马达角速度和油缸受力,见图2中部。通过ADAMS控制模块,建立二者接口文件,将其导入出铝车AMESim液压与控制模型中,实现力与位移、角速度和力矩,在动力学模型和液压系统之间的数据传递,从而,建立起出铝车前半车和后半车液压系统的机电液协同仿真模型,如图2所示。

图2 出铝车机电液协同仿真模型
Fig. 2 Co-simulation model of mechanical electrical hydraulic combined system of tapping vehicle
2 机电液协同仿真
出铝车仿真工况选择运输行驶过程中最为恶劣的工况为先爬坡后下坡。
仿真工况:出铝车的第1排轮胎和第4排轮胎均采用55 kW液压恒功率驱动上坡,下坡制动,坡度为10%。0~55 s液压系统供油,驱动油泵流量120 L/min,转速1 250 r/min,马达排量780 mL/r,溢流阀压力调定至38 MPa。55 s至77 s制动,驱动油泵排量转速,马达排量均不变,换向阀换位,溢流阀压力调定至12.35 MPa。设置仿真时间77 s。
将仿真工况输入出铝车机电液协同仿真模型中,开展出铝车爬坡工况机电液协同仿真,从而得到出铝车爬坡工况下的运动学和动力学结果、曲线及动画。
3 联合仿真结果分析
3.1 车体运动学分析
图3所示为出铝车姿态曲线。由图3可知:车体在上坡和下坡时,俯仰角度为5.71°,符合10%坡度,转向角度基本为0°,说明车体路径为直线,最大侧翻角为0.20°,表明车体稍稍向右侧倾斜,这主要是由于车架右侧存在缺口而引起的,与实际状况相符。
图4所示为车体质心位移曲线。由图4可知:车体纵向前行120 m,横向位移为0 m,垂向位移最大为4.5 m,与坡同高,且垂向位移曲线与坡形一致。

图3 出铝车姿态曲线
Fig. 3 Attitude curves of tapping vehicle

图4 车体质心位移曲线
Fig. 4 Centroid displacement curves of tapping vehicle
图5所示为车体质心速度和加速度曲线。由图5中速度曲线1可知:在平地和坡顶面车速均为1.5 m/s,上坡车速恒定为1.25 m/s,下坡时虽然有制动力,但由于车子重力分力作用,车子依然加速,在71 s时,车子到达坡底,最大速度为2.8 m/s,然后,在制动力作用下,车速下降为0 m/s。由图5中加速度曲线2可知:车体加速度变化均出现于各坡面转折处,最大加速度发生在从坡顶下坡的转折处,约为2.37 m/s2。此二曲线反映了车体实际运行状况。

图5 车体质心速度和加速度曲线
Fig. 5 Centroid velocity and acceleration curves of tapping vehicle
图6所示为出铝车第1排至第4排轮胎的纵向打滑率曲线。仿真得出同排的各列轮胎打滑率基本相同。由图6可知:在爬坡过程中,第1排和第4排轮胎的纵向打滑率是25%,而第2排和第3排轮胎的纵向打滑率为4%,在下坡过程,二者分别是18.0%和1.5%,且在各坡道转折处,车体受到冲击,打滑率会出现瞬间突变。

图6 第1排至第4排轮胎纵向打滑率曲线
Fig. 6 Longitudinal slip curves of tires from row1 to row4
3.2 车体动力学分析
图7所示为第3排和第4排悬架和车架铰接点受力曲线。仿真得出第1排和第2排悬架和车架铰接点受力曲线与图7曲线类似。由图7可知:悬架与车架铰接点的冲击力均出现于坡道转折处,其中最大冲击力发生于下坡道首转折处,此时,第4排左侧、右侧悬架和车架铰接点受力分别为10 kN和20 kN,第3排左侧、右侧悬架和车架铰接点承受了最大力,分别为125 kN和135 kN,可见右侧铰接点受力比左侧的大,这是由车体右侧缺口引起,与实际状况相同。

图7 第3排和第4排悬架和车架铰接点受力曲线
Fig. 7 Force curves of joints between carriage and back two suspensions
图8所示为门架与前后卡板油缸铰接点受力曲线。由图8可知:在下坡道首转折处,前后卡板油缸铰接点受力均约为30 kN,而在上坡过程,前卡板油缸铰接点受力比后卡板油缸的大。
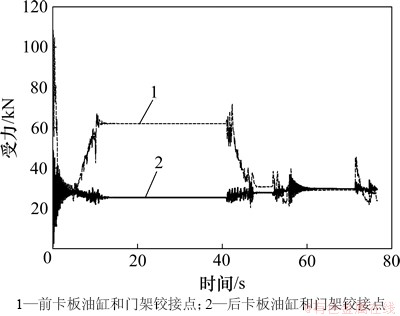
图8 门架与前后卡板油缸铰接点受力曲线
Fig. 8 Force curves of joints between door frame and pallet cylinders
图9所示为门架与前后包叉铰接点受力曲线。由图9可知:门架与前后包叉铰接点受力波动均出现于坡道转折处,最大冲击力发生于下坡道首转折处,此时,前后包叉铰接点受力分别为140 kN和120 kN。

图9 前后包叉和门架铰接点受力曲线
Fig. 9 Force curves of joints between door frame and forks
图10所示为车架、门架与前后举升油缸铰接点受力曲线。由图10可知:车架、门架与前后举升油缸铰接点受力波动均出现于各坡道转折处,最大冲击力发生于下坡道首转折处,此时,前后举升油缸分别与车架和门架铰接点受力分别为150,160 kN和170,180 kN。可见:在下坡道首转折处,举升油缸最大受力位置为后举升油缸与车架铰接点处。

图10 车架、门架与前后举升油缸铰接点受力图
Fig. 10 Force curves of joints between carriage, door frame and lifting cylinders
图11所示为第1排第1列和第4排第1列轮胎功率曲线。仿真得出同排的各列轮胎驱动功率基本相同。由图11可知:第1排第1列和第4排第1列轮胎在爬坡过程中为恒定功率驱动均为12.5 kW。由此,出铝车8个驱动轮胎爬坡的总功率为100 kW,其效率约为90.9%。

图11 第1排第1列和第4排第1列轮胎功率曲线
Fig. 11 Driving powers of the first row tire and the fourth row tire in the first column
综上所述,出铝车爬坡运动学与动力学参数在从坡顶下坡首转折处时出现最大冲击值。
4 出铝车有限元仿真
基于有限元(finite element method)理论[12],利用ANASYS软件,建立起车架和门架的有限元模型,并以出铝车爬坡机电液联合仿真的车体最大受力,即在下坡道首转折处时各铰接点的受力数据作为载荷施加到车架和门架的有限元模型里,进行车架和门架的有限元计算,分析其应力和变形特性,判断出铝车主要部件车架与门架的安全性。
车架和门架为焊接件,材料为Q345钢,屈服极限σs =345 MPa,弹性模量E=2.1×105 MPa。
4.1 车架和门架有限元模型建立
出铝车车架为对称结构,选择半车架作为研究对象。将出铝车车架和门架的Proe模型通过无缝接口导入ANSYS软件,依次简化[13]、选材、几何修整、设置零件连接关系、自选单元、网格划分、质量评价、网格优化,最后获得出铝车车架与门架的有限元模型,如图12和图13所示。

图12 车架有限元模型
Fig. 12 Finite element model of carriage
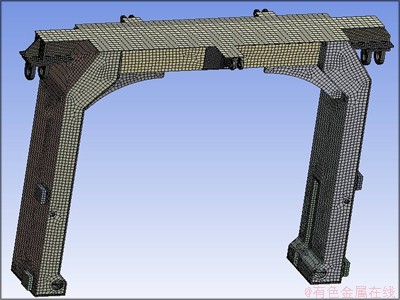
图13 门架有限元模型
Fig. 13 Finite element model of door frame
4.2 边界约束设置
对于四排轮式车辆车架的约束方式一般有第2排、第3排回转支承约束和第1排、第4排回转支承约束2种[14-15]。本文采用第2排和第3排回转支承约束方式。
车架边界约束:设置纵向、横向、垂向位移约束于第2排左回转支承处,垂向和纵向位移约束于第2排右侧回转支承。
门架边界约束:设置垂向和横向位移约束于门架前后吊耳圆孔处,纵向位移约束于门架前后吊耳端面处,纵向位移2 mm约束于门架前后导向块,横向位移0.5 mm约束于门架前后导向块。
4.3 有限元计算与分析
在ANASYS软件平台上,将车体在下坡道首转折处各铰接点受力结果作为边界力施加于车架和门架有限元模型,开展有限元计算与求解,获得了出铝车车架和门架在爬坡时的应力云图和位移云图,分别如图14~17所示。
4.3.1 车架有限元计算与分析
车架的最大位移和最大VonMises应力及其位置分别如图14和图15所示。
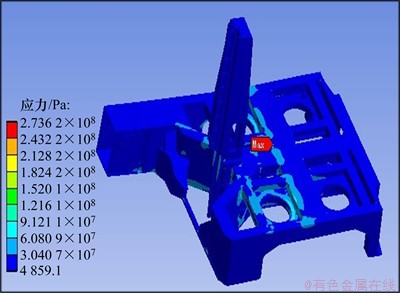
图14 车架应力云图
Fig. 14 Color stress cloud charts of carriage

图15 车架位移云图
Fig. 15 Color displacement cloud charts of carriage
由图14可知:车架最大VonMises应力约为273.6 MPa,发生于车架横板约束位置点处,其余部位应力均小于152 MPa。
由图15可知:车架最大变形发生于车架最前部位,约为4.3 mm,随着往车架后部移动,变形趋于减小,另外位于缺口下外边缘和顶部均存在约2.9 mm变形,车架中部内侧有1.5 mm变形。
因此,新型出铝车车架的强度和刚度满足设计要求。
4.3.2 门架有限元计算结果与分析
门架最大位移和最大VonMises应力及其对应位置分别如图16和图17所示。

图16 门架应力云图
Fig. 16 Color stress cloud charts of door frame

图17 门架位移云图
Fig. 17 Color displacement cloud charts of door frame
由图16可知:门架最大VonMises应力约为212.2 MPa,出现在吊耳旁的横板处,其余部位应力均小于118 MPa。
由图17可知:门架最大变形发生于门架立柱根部,约为2.4 mm,随着往门架上部移动,变形趋于减小。
因此,新型出铝车门架的强度和刚度满足设计要求。
综上所述,所设计的新型出铝车车架和门架是安全的。
5 结论
(1) 建立了新型出铝车多刚体动力学模型和虚拟样机,以及液压系统和控制模型。
(2) 突破ADAMS与AMEsim软件接口技术,建立了出铝车机电液协同仿真模型。
(3) 出铝车机电液爬坡联合仿真表明,车体主要零部件的运动学和动力学结果符合车体实际运行状况,出铝车建模和仿真正确。
(4) 建立了新型出铝车主要部件有限元模型。
(5) 车架和门架有限元分析表明,新型出铝车的强度和刚度满足要求,其设计是安全的。
参考文献:
[1] 张卫东, 莫旭辉, 彭劲松. 基于ANSYS的液压平板车车架结构和模态分析[J]. 汽车科技, 2008, 14(3): 46-49.
ZHANG Weidong, MO Xuhui, PENG Jinsong. Structure and modal analysis of hydraulic pallet transporter based on ANSYS[J]. Auto Mobile Science and Technology, 2008, 14(3): 46-49.
[2] 张磊, 仲梁维, 陈秋顺. 平板车动载荷分析[J]. 起重运输机械, 2008, 28(2): 58-60.
ZHANG Lei, ZHONG Liangwei, CHEN Qiushun. Dynamic load analysis of pallet transporter[J]. Hoisting and Conveying Machinery, 2008, 28(2): 58-60.
[3] 常绿. 矿用自卸式汽车平顺性虚拟仿真技术及试验研究[J]. 金属矿山, 2009(8): 97-100.
CHANG  . Study on the virtual simulation of ride comfort of mining dump truck[J]. Metal Mine, 2009(8): 97-100.
. Study on the virtual simulation of ride comfort of mining dump truck[J]. Metal Mine, 2009(8): 97-100.
[4] 李江波, 黄明辉, 赵兴. 基于ADAMS与EASY5的大型模锻液压机联合仿真[J]. 机械设计与制造, 2011(6): 235-237.
LI Jiangbo, HUANG Minghui, ZHAO Xing. Co-simulation of a die forging press based on ADAMS and EASY5[J]. Machinery Design and Manufacture, 2011(6): 235-237.
[5] 丁克勤. 多刚体系统动力学[M]. 北京: 机械工业出版社, 2010: 45-80.
DING Keqin. The multibody dynamics[M]. Beijing: China Machine Press, 2010: 45-80.
[6] 陈立平. 机械系统动力学分析及ADAMS应用教程[M]. 北京: 清华大学出版社, 2008: 98-106.
CHEN Liping. Mechanical system dynamics analysis and ADAMS application tutorial[M]. Beijing: Tsinghua Press, 2008: 98-106.
[7] Stronge W J. Generalized impulse and momentum applied to multibody impact with friction[J]. Mechanics of Structures and Machines, 2001, 29(2): 239-260.
[8] 李军. ADAMS实例教程[M]. 北京: 北京理工大学出版社, 2007: 140-166.
LI Jun. ADAMS tutorial example[M]. Beijing: Beijing Institute of Technology Press, 2007: 140-166.
[9] 郭孔辉, 袁忠诚, 卢荡. UniTire轮胎稳态模型的速度预测能力[J]. 吉林大学学报(工学版), 2005, 35(5): 457-461.
GUO Konghui, YUAN Zhongcheng, LU Dang. Speed prediction ability of UniTire steady-state model[J]. Journal of Jilin University (Engineering and Technology Edition), 2005, 35(5): 457-461.
[10] Pacejka H B. Tyre and vehicle dynamics [M]. Oxford: Butter-Worth Heinemann, 2002: 55-60.
[11] 付永领. LMS Imagine. Lab AMEsim系统建模和仿真实例教程[M]. 北京: 北京航空航天大学出版社, 2011: 35-62.
FU Yongling. LMS Imagine. Lab AMEsim system modeling and simulation tutorial example[M]. Beijing: Beihang University Press, 2011: 35-62.
[12] 胡于近, 王彰齐. 有限元分析及应用[M]. 北京: 清华大学出版社, 2009: 77-120.
HU Yujin, WANG Zhangqi. Finite element analysis and application[M]. Beijing: Tsinghua University Press, 2009: 77-120.
[13] 钟佩思, 辛纪光, 刘凤景. 基于 Hypermesh的中型货车车架有限元分析与优化[J]. 煤矿机械, 2009, 30(4): 6-8.
ZHONG Peisi, XIN Jiguang, LIU Fengjing. Finite element analysis and optimization of medium truck frame based on Hypermesh[J]. Coal Mine Machinery, 2009, 30(4): 6-8.
[14] 张银生, 吴运新. 液压平板车有限元分析与试验测试[J]. 现代制造工程, 2009(1): 43-47.
ZHANG Yinsheng, WU Yunxing. Finite element analysis and testing for the hydraulic pallet transporter[J]. Modern Manufacturing Engineering, 2009(1): 43-47.
[15] 胡桂涛, 吴运新. 抱罐车后车架有限元分析及改进研究[J]. 机械科学与技术, 2009, 28(1): 88-91.
HU Guitao, WU Yunxing. Finite element analysis and improvement for the rear frame of a slag pot carrier[J]. Mechanical Science and Technology for Aerospace Engineering, 2009, 28(1): 88-91.
(编辑 杨幼平)
收稿日期:2013-07-10;修回日期:2014-01-20
基金项目:国家重点基础研究发展计划(“973”计划)项目(2014CB046305)
通信作者:李力(1963-),女,湖南益阳人,教授,从事机电液技术与装备、海洋技术研究;电话:13873176735;E-mail: lilicsu@vip.sina.com

