���ڳ߶ȿռ����۵�Harris�ǵ���
�°�, ������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ, ���� ��ɳ, 410083)
ժҪ: �о���һ�ֻ��ڳ߶ȿռ����۵�Harris�ǵ��ⷽ���� ����Harris�����ij߶ȿռ��ʾ, ���ÿ���߶�ˮƽ�ϵļ�ֵ, ���õ����㷨��֤ÿ���߶�ˮƽ��LoG�����Ƿ������ֵ, �Ӷ��õ������ǵ��λ�ü���߶ȡ� �÷����ڱ���Harris�ǵ㲻�ܹ����������������̬�仯Ӱ���ͬʱ, ���ܼ�����߶��µ������㡣 ͨ��ʵ����֤�÷������г߶Ȳ�������, �����ڳ߶ȱ仯�ϴ���Ӿ�ϵͳ��
�ؼ���: Harris�ǵ�; �߶ȿռ�; LoG����; �߶Ȳ�����
��ͼ�����:TP391.41 ���ױ�ʶ��:A ���±��: 1672-7207(2005)05-0751-04
Harris corner detection based on theory of scale-space
CHEN Bai-fan, CAI Zi-xing
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: An improved method of Harris corner based on the theory of scale-space was described, and a scale-space representation of Harris corner by which local maximum points were detected at each scale level was established. The extrema over scale of the Laplacian of Gaussian (LoG) which was used to select the scale of interest points were applied. For each point, an iterative algorithm can be used to detect the location and the scale of interest points simultaneously. This method not only maintains the advantages of Harris corner which is invariant to the changes of intensity and camera pose but also can be used in multi-scale. It is proved to be scale invariant by experiments and can be applied to the vision system with significant scale changes.
Key words: Harris corner; scale-space; Laplacian of Gaussian operator; scale invariant
���������ǻ����Ӿ���һ����Ҫ�о�����, ������Ӿ���������, ��������궨�� Ŀ���⡢ ��ά�ؽ���, ���ǻ������������ȡ, ����������ȡ�ľ��ȼ������û�ֱ��Ӱ�쵽��Щ�����Ľ���� Ŀǰ, �����㡢 �ǵ���ȡ������: ���������ķ���[1, 2], �������ȵķ���[3, 4]�ͻ��ڲ���ģ��[5, 6]�ķ�����
C.Schmid��[7]����, Harris�ǵ���ȡ������ĿǰЧ����õ�, �������������̬�����յ�Ӱ�졣 Ȼ��, ���ڳ߶ȱ仯�ϴ���Ӿ�ϵͳ, �÷���ȴ���ܱ��������IJ�����, ���ƶ��������Ӿ�ϵͳ, �����ƶ�������λ�ñ仯, ��ɼ���ͼ�����й��ա� λ�õı仯, �����ڳ߶ȱ仯�� ʵ��ͼ���е������ǵ㳣�������ڲ�ͬ�ij߶ȷ�Χ��, ����ÿһ�ǵ�ij߶���Ϣ��δ֪�ġ� һ����Ϊ�ڽϴ�߶����ܽϿɿ����������ͼ������Ľǵ�, ���ǵ�Ķ�λ����ȷ�� �෴, �ڽ�С�߶��¶������������ǵ�Ķ�λ�Ƚ�ȷ, �����ı��������ӡ� ����, �ɿ������ڽϴ�߶��¼����ǵ�, Ȼ���ڽ�С�߶��¶����������ǵ���нϾ�ȷ��λ��
���, ���ö�߶ȼ������ǵ��ǻ�����������ǵ��һ������;��, ����Ч������ö����ͬ�߶ȵĽǵ�������, ͬʱ��ȷ�ؼ��һ��ͼ���ڷ����ڸ����߶�ˮƽ�ϵĽǵ㡣
�ڴ�, �����о�һ�ֽ��߶ȿռ�������Harris�ǵ����������ϵĶ�߶Ƚǵ��ⷽ���� �÷�����Harris�ǵ㺯��ת��Ϊ�߶ȿռ��ʾ��ʽ, ������LoG������ѡ��߶�, ���õ��������λ�úͳ߶ȡ�
1 �߶ȿռ�����
�߶ȿռ�����[8]��ͨ����ԭʼͼ����г߶ȱ任, ���ͼ���߶��µij߶ȿռ��ʾ����, ����Щ���н��г߶ȿռ�����������ȡ, ���Ը���������Ϊһ����������, ʵ�ֱ�Ե�� �ǵ���Ͳ�ͬ�ֱ����ϵ�������ȡ�ȡ�
�߶ȿռ��ʾ��һ�ֻ�����������ǻ��ڱ�Ե�ı���, ��Ϊ�߶ȿռ������е�һ����Ҫ����, �߶ȿռ�˱�����Ϊ:
fout=K*fin��(1)
�������е��ź�fin, ������任��K������õ����ź�fout�еļ�ֵ(һ���ֹ������)������ԭͼ��ļ�ֵ, ���KΪ�߶ȿռ��, �����еľ����任��Ϊ�߶ȱ任��
�߶ȿռ��ʾͨ��ƽ�����, ������Ϊ(x, ��)�ռ�, x�ͦҷֱ�Ϊλ�ò����ͳ߶Ȳ����� �����ò�ͬ�߶ȵ�ƽ��������ͬһͼ������˲�ʱ, �õ���һ��ͼ�����ԭʼͼ������ڸ�ƽ�������ij߶ȿռ�, ��Ϊ�߶ȿռ����ꡣ
�ڸ�˹�߶ȿռ�, ͬһ����������ͱ�Ե�ڲ�ͬ�ij߶��Ͼ��������, �����߶ȱ仯ʱ, �µ���������ܳ���, ���ϵ������������λ����ʧ�� ��������Դ����ĺ������ǹ��е�, ���ɱ����, ������������, �����Լ�С�� Ȼ��, ���ڸ�˹��[9]

�������ԡ� ƽ�Ʋ����ԡ� ��ת�����Ժ��Ӽ����Ե�����, ����֤��, ��˹����ʵ�ֳ߶ȱ任��Ψһ�任��[10]�� ���, ���ø�˹�˵�һ������Harris�ǵ����ӱ任�ɳ߶ȿռ�ı�ʾ��
2 ��߶ȱ任�µ�Harris�ǵ��㷨
2.1 Harris���ӵij߶ȿռ��ʾ
Harris������C.Harris��M.Stephens[3]�����һ�ֻ����źŵĵ�������ȡ����, ��ԭ��Ϊ: ���ijһ������һ����ССƫ�ƶ�������Ҷȵĺܴ�仯, ���˵���õ��ǽǵ㡣
Harris����RΪ:
��Iuv(x)�ֱ�Ϊͼ���x�ĻҶ���u��v�����ƫ���Լ������ƫ��; kΪ����ֵ, ͨ��ȡ0.04~0.06�� ��ij���Harris����R�����趨��ֵTʱ, �õ�Ϊ�ǵ㡣
Harris������һ����Ч�ĵ�������ȡ����, ���ŵ���:
a. ����� Harris������ֻ�õ��Ҷȵ�һ�ײ��, ������
b. ��ȡ�ĵ��������ȶ��Һ����� Harris���Ӷ�ͼ���е�ÿ���㶼��������Ȥֵ, Ȼ����������ѡ�����ŵ㡣 ʵ�����, ��������Ϣ�ḻ������, Harris���ӿ�����ȡ���������õ�������, ����������Ϣ�ٵ�����, ��ȡ������������١�
c. �ɶ�������ȡ�����ǵ㡣
d. ��ʹ������ͼ�����ת�� �Ҷȵı仯�� ����Ӱ����ӵ�ı任, ��Ҳ�����ȶ���һ�ֵ�������ȡ�㷨[11]��
Ȼ��, Harris���Ӳ������г߶Ȳ����ԡ� ���, ���������ϳ߶ȿռ��������Ľ�Harris���ӡ�
Ϊ�˻�ȡHarris���ӵij߶ȿռ��ʾ, ���ȼ���ͼ����ij��x��u��v�����ϵ�ƫ��, Ȼ�����ƫ��Ϊs��n(����: sΪһ����, s>1)�ĸ�˹�˵��ֽ��о���:
Iu(x, s��n)=I(x)*Gu(x, s��n);(4)
Iv(x, s��n)=I(x)*Gv(x, s��n)��(5)
��Harris�ǵ���C(x)�ĺ�������Ϊ

����: ��I=��n, Ϊ����������ʱѡ��ij߶Ȳ���; ��D=s��n, Ϊ�ֳ߶�; G(��I)Ϊ��˹������
ͨ���ж�

���ɼ�����n�߶�ˮƽ�ϵ������ǵ㡣
����ijһ�ǵ���ͼ1(a)��ʾ, ��ýǵ�߶ȿռ������ͼ1(b)��ʾ��
2.2 ��߶Ƚǵ����㷨
LoG���ӫ�2g, ����D.Marr��E.Hildreth�����, �ֳ�Marr-Hildreth���ӡ�

����: f(x, y)Ϊ����⺯����

ͼ 1 �߶ȿռ��µ�Harris�ǵ�
Fig. 1 Harris Corner in scale-space
LoG���ӽ���˹�˲���������˹��Ե�������һ��, ��Ҫ���ڱ�Ե��⡣ �ڱ�����, ����һ�����͵�LoG����ģ��, ��֤ijһָ���ij߶�ˮƽ�ϼ����Ľǵ��Ƿ�Ϊ��ֵ, �Ӷ��õ��߳߶Ȳ����Ե������ǵ㡣
��߶�Harris�ǵ����㷨�ľ��岽������:
a. Ԥѡ�߶ȱ�����n����ֵT, ����ʽ(6)��(7)�����ÿһ�߶�ˮƽ�ϵĺ�ѡ�����ǵ㡣 b. ���õ����㷨��֤ÿ���߶�ˮƽ�ϵĺ�ѡ�ǵ��LoG�����Ƿ������ֵ, �Ӷ��õ����������ǵ��λ����߶ȡ� ����ͼ��������߶ȿռ�, �����ڴ�߶�ˮƽ��n=��0�ϼ��Ľǵ㼯Copt, ��ͼ��߶������СΪ��n=��1, ���ڸ�ͼ����Copt�������ڼ���µĽǵ㼯Cnew, ������Cnew, �����CnewΪ��ǰͼ�������ǵ㼯�� �ظ����Ϲ���, ֱ��Cnew���ٱ仯, ��ͼ��߶��㹻СΪֹ��
3 ʵ���������
ʵ����, ȡ��˹�˺����ı�ƫ���������s=0.7(�����ɶ��ʵ��ó��ľ���ֵ, �ɸ���ͼ���м��Ŀ�겻ͬ���е���), Harris�ǵ������еij���k=0.04, ��ֵT=1000, �Ҳ���һ�����͵�5��5��LoG����ģ��:

����n�ֱ�ȡ3, 2��1ʱ, ��ʼͼ��Ľǵ���ȡ�����ͼ2(b), 2(c)��2(d)��ʾ��
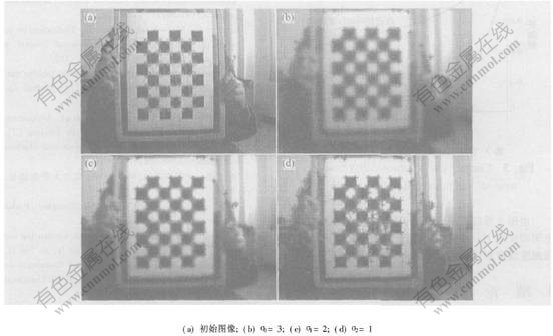
ͼ 2 3�ֳ߶��µ�Harris�ǵ���
Fig. 2 Harris corner detection at three scales
���Կ���, ���ںڰ��������ļ�Ŀ��, �ó߶Ȧ�n=3������ȡ�����õ������ǵ�, �����ڱȽϸ��ӵ�Ŀ��, ��ͼ�еij��ڰ��������Ŀ��, ����Ҫ��С�ij߶ȡ�
ijһ�ǵ����㷨�����ӿ�ͨ���ȶ����� �ɿ�����Ϳ���������������[12]�� ��3���������ı������ ��ֵ����������������Ľǵ����ʼ�����Ľǵ���ظ��ʦǾ�����

����: Ci��ʾ���������ǵ㼯��; |Ci|��ʾ����Ci��Ԫ�ص���Ŀ; min����ȡ2�����еĽ�С��; ���ӵĺ����Ǽ��㲻ͬ�߶��¼�����ȫ��ͬ�Ľǵ�(���ᡢ �����궼��ͬ)����Ŀ�� ��ʽ(9)��֪, �ظ��ʦ�Խ��, �㷨���ȶ���Խ�ߡ�
�����ظ��ʦ�������û��ڳ߶ȿռ����۵�Harris�ǵ����㷨���ȶ��ԺͿɿ��ԡ� ��ͼ2�еij�ʼͼ����в�ͬ�߶��µĽǵ���(��n��[1, 4.5]), ��C1��C2�ֱ��ʾ�㷨�ڵ�һ���߶Ⱥ͵ڶ����߶��м��Ľǵ�ļ���, �������ظ��ʡ� ��������δ�Ľ���Harris�ǵ���ȶ��Խ��бȽ�, �����ͼ3��ʾ��
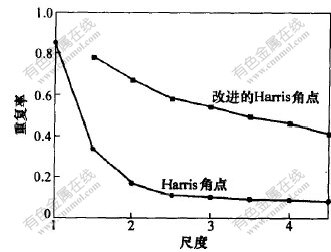
ͼ 3 2��Harris�ǵ���ظ��ʱȽ�
Fig. 3 Comparison of repeatability rate of original and improved Harris corner
��ͼ3���Կ���, ���߶ȱ仯ʱ, �û��ڳ߶ȿռ����۵�Harris�ǵ��ⷽ����ԭHarris�ǵ�����ȶ��Ϳɿ�, �����߳߶Ȳ����ԡ�
4 �� ��
a. ���ó߶ȿռ����۽�Harris�ǵ㺯���任�ɳ߶ȿռ�ı�ʾ��ʽ, �Ӷ�����ÿһ�߶�ˮƽ�ϵ������㡣 Ȼ��, ����LoG���ӵ����������߶��µ������ǵ㡣
b. �÷����̳���Harris�ǵ�IJ��ܹ��ա� ��תӰ����ŵ�, �������˳߶Ȳ�������, ���н�ǿ���ȶ��ԺͿɿ��ԡ�
�����:
[1]Mokhtarian F, Suomela R. Robust image corner detection through curvature scale space[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998, 20(12): 1376-1381.
[2]Pikaz A, Dinstein I. Using simple decomposition for smoothing and feature point detection of noisy digital curves[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1994, 16(8): 808-813.
[3]Harris C, Stephens M. A combined corner and edge detector[A]. Matthews M M. Proceedings of the Fourth Alvey Vision Conference[C]. Manchester: the University of Sheffield Printing Unit, 1988. 147-151.
[4]Deriche R, Giraudon G. A computational approach for corner and vertex detection[J]. International Journal of Computer Vision, 1993, 10(2): 101-124.
[5]Baker S, Nayar S K, Murase H. Parametric feature detection[J]. International Journal of Computer Vision, 1998, 27(1): 27-50.
[6]Parida L, Geiger D, Hummel R. Junctions: Detection, classification, and reconstruction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998, 20(7): 687-698.
[7]Schimid C, Mohr R, Bauckhage C. Evaluation of interest point detectors[J]. International Journal of Computer Vision, 2000, 37(2): 151-172.
[8]Lindeberg T. Scale-space theory: A basic tool for analysing structures at different scales[J]. Journal Applied Statistics, 1994, 21(2): 223-261.
[9]Babaud J, Witkin A P, Baudin M, et al. Uniqueness of the Gaussian kernel for scale-space filtering[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, 8(1): 26-33.
[10]������. ������Ӿ�[M]. �Ϻ�: ������ѧ������, 1993.
WU Li-de. Computer Vision[M]. Shanghai: Fudan University Press, 1993.
[11]Schmid C, Mohrand R, Bauckhage C. Comparing and evaluating interest points[A]. Ahuja N, de Sai U. Proceedings of the Sixth International Conference on Computer Vision[C]. Washington: IEEE Computer Society, 1998. 230-235.
[12]����, ������. �ǵ����㷨���۷������о�[J]. ��������ҵ��ѧѧ��, 1998, 30(2): 7-10.
YANG Yang, ZHANG Tian-wen. Assessing criterion of corner finders[J]. Journal of Harbin Institute of Technology, 1998, 30(2): 7-10.
�ո�����:2005-01-28
������Ŀ:������Ȼ��ѧ����������Ŀ(60234030)
�����:�°�(1979-), Ů, ���ϳ�����, ��ʿ�о���, ���»����Ӿ��о�
������ϵ��: �°�, Ů, ��ʿ�о���; �绰: 0731-8830583(O); E-mail: chenbaifan@21cn.com

