一种快速收敛的航空信道载波恢复判决反馈盲均衡算法
陈强,杨霄鹏,达新宇,欧阳超
(空军工程大学 信息与导航学院,陕西 西安,710077)
摘要:通过研究超指数迭代判决反馈盲均衡结构有效克服多径效应影响。针对航空信道存在快速时变的多普勒特性,在判决反馈均衡器中引入数字锁相环,实现对载波相位旋转的纠正。利用归一化思想,构造新的快速收敛的误差函数,提出一种带二阶数字锁相环快速收敛载波恢复修正的超指数迭代判决反馈盲均衡算法。仿真结果表明:在低空宽带航空信道环境中,新算法可以很好地对旋转相位进行跟综和补偿,提高载波恢复性能,降低误码率,与常规的盲均衡算法相比,在收敛速度、稳健性和抗干扰能力等方面优势明显。
关键词:航空通信;超指数;判决反馈;盲均衡;数字锁相环
中图分类号:TN911.5 文献标志码:A 文章编号:1672-7207(2013)09-3707-06
A fast super-exponential iteration decision feedback blind equalization algorithm for carrier recovery of aeronautical channel
CHEN Qiang, YANG Xiaopeng, DA Xinyu, OUYANG Chao
(Institute of Information and Navigation, Air Force Engineering University, Xi’an 710077, China)
Abstract: A blind equalizer based on super-exponential iterative decision feedback structure was studied to efficiently combat the effects of multipath fading. For the time-varying Doppler aeronautical channels, a digital phase-locked loop was introduced in decision feedback equalization to correct the carrier phase rotation. A new fast convergence error function was constructed based on the idea of normalization and a fast carrier recovery modified blind equalization algorithm of super-exponential iterative decision feedback with second order digital phase-locked loop (FCRMSEI-DFE-DPLL2) was proposed. The simulation results show that the proposed algorithm may not only track and compensate phase rotation, but also improve the carrier recovery ability and reduce the bit error rate. The new algorithm has better advantage of convergence speed, robustness and anti-interference ability compared with several other blind equalization algorithms.
Key words: aeronautical communication; super-exponential; decision feedback; blind equalization; digital phase-locked loop
近年来,随着军用和民用航空的飞速发展和传输速率逐步提高,航空通信系统已逐渐向宽带、大容量等方向发展。航空信道是一个时变衰落信道,飞行器的高速运动与较高的载波频率会使接收信号产生较大的多普勒扩展[1],将严重影响信号接收,使系统误码率降低。特别是在低空空域,航空器飞行高度低,地面天线与航空器之间通信仰角小[2],易受地形地物影响,此时信道环境更加恶劣,多径、多普勒等衰落现象迅速增加,加上接收端和发射端的位置变化,都会引起严重的相位起伏,甚至导致相位反转,造成地空通信链路传输可靠性降低。在航空移动通信系统中,多径衰落会带来严重的码间干扰(ISI)。克服ISI的一种有效途径是在接收端采用均衡技术[3]。其中,盲均衡技术[4-6]因其不使用训练序列,可提高传输效率,在水声通信中得到广泛应用。恒模算法(CMA)因其性能稳健和易于实现,成为研究热点。但是,CMA算法只利用信号的幅度信息,对于相位信息而言是盲的,当信道对信息产生固定相移,均衡器的输出端会造成误判。而修正的恒模算法(MCMA)隐含地使用锁相环,可以同时完成盲均衡和载波相位恢复,但收敛速度较慢,稳态均方误差也较大。超指数盲均衡迭代(SEI)算法具有较快的收敛速度,但稳态误差较大,且当信道多普勒频移较为严重时,不能纠正相位旋转。然而,盲均衡技术在航空通信领域应用甚少,由于低空航空信道频率选择性衰落较严重,常常表现出较深的频谱零点,线性均衡器会引起噪声放大,常采用非线性结构的判决反馈均衡器(DFE)克服信道失真[6]。本文作者在文献[6]的基础上,针对时变多径衰落的低空宽带航空通信信道,根据归一化思想,构造新的误差函数,并结合数字锁相环机制,共同克服多径效应和多普勒频移对通信系统的不良影响,提出一种用于QPSK信号的带二阶数字锁相环快速收敛载波恢复修正超指数迭代判决反馈盲均衡(FCRMSEI-DFE- DPLL2)算法。
1 算法基本原理
1.1 超指数迭代判决反馈盲均衡器
实际中通常采用线性均衡器和非线性均衡器来进行均衡,与线性均衡器相比,判决反馈均衡器有2个突出优点[7]:一是克服了线性均衡器在单位圆零点处形成谱峰、放大噪声的缺点,而且判决反馈在均衡信道因果部分的码间干扰时,所需权向量抽头数比线性均衡器少;二是具有良好的时变跟踪性能。因此,研究判决反馈均衡器,对航空信道均衡有重要意义。超指数迭代判决反馈盲均衡器的基带等效模型如图1所示。由图1可见:DFE由1个前馈滤波器和1个反馈滤波器组成。 ,为前馈滤波器的抽头权向量;
,为前馈滤波器的抽头权向量; ,为反馈滤波器的抽头权向量;s(k)为独立同分布的发射信号序列;
,为反馈滤波器的抽头权向量;s(k)为独立同分布的发射信号序列; ,为基带航空信道冲击响应;n(k)为零均值高斯白噪声序列;
,为基带航空信道冲击响应;n(k)为零均值高斯白噪声序列;
 ,为前馈均衡器输入递归向量,经判决器Qu后,得到原发射信号s(k)的估计值
,为前馈均衡器输入递归向量,经判决器Qu后,得到原发射信号s(k)的估计值 ;
; ,为反馈均衡器输入递归向量;
,为反馈均衡器输入递归向量; 为无记忆非线性函数;e(k)为盲均衡误差项。前馈滤波器输出
为无记忆非线性函数;e(k)为盲均衡误差项。前馈滤波器输出
 ,反馈滤波器输出
,反馈滤波器输出
 ,判决器输入
,判决器输入 。
。
1.2 快速收敛载波恢复修正的超指数迭代算法
与CMA算法相比,SEI算法在权向量每次迭代时计算均衡器输入信号自相关矩阵的逆矩阵Q,通过该矩阵来优化步长因子对数据起到白化作用,从而使得算法收敛速度比CMA算法快,并且这2种算法充分迭代后的剩余均方误差相同。由于SEI算法是在CMA算法上提出来的,SEI算法对于相位也是盲的,当存在载波相位残余时,剩余相位误差会使均衡输出信号星座产生旋转。通过对均衡器输出的实部和虚部采用非线性变换,得到修正的超指数迭代算法(MSEI),从而减小剩余均方误差,加快收敛速度。该算法的迭代过程如下。
(1) Q矩阵因子的迭代:
 (1)
(1)
(2) 权向量的迭代:
 (2)
(2)

图1 算法基带等效模型
Fig.1 Equivalent mode of algorithm baseland
 (3)
(3)
若采用修正常模判决反馈方法,则误差项e(k)为

 (4)
(4)
其中: ;
;

 ,E[・]表示数学期望;Re[・]表示取实部运算;Im[・]表示取虚部运算。
,E[・]表示数学期望;Re[・]表示取实部运算;Im[・]表示取虚部运算。
张艳萍等[8]指出:发射信号为等概率QPSK信号,当前馈滤波器的代价函数较大时,可能会放大梯度噪声。为此,对误差项进行归一化,将误差函数应用于前馈滤波器,定义前馈滤波器的新的误差函数:


 (5)
(5)
反馈滤波器的新误差函数为
 (6)
(6)
1.3 数字锁相环
为更好地跟踪航空时变信道的较大多普勒频移和消除相位旋转,在判决反馈器中引入数字锁相环[9],即在判决部分增加一个相位跟踪环节,这样不仅能纠正解调中存在的固定相位误差,而且能纠正由于频偏造成的连续相位旋转。则带有锁相环机制的快速收敛载波恢复修正的超指数判决反馈盲均衡器结构如图2所示。这时,前馈滤波器输出权向量迭代方程变为
 (7)
(7)
采用DPLL的相位补偿迭代公式为
 (8)
(8)
其中: 和
和 为DPLL的比例系数,用来决定环路的增益和带宽。
为DPLL的比例系数,用来决定环路的增益和带宽。
由于一阶DPLL的跟踪性能不够理想,不能准确捕获由于多普勒频移和频偏带来的相位旋转,对于快时变信号,为提高算法对航空信道变化的稳健性,引入性能稳定且对载波相位跟踪性能好的内置二阶DPLL。在通常情况下, ,则
,则
 (9)
(9)
2 仿真实验及性能分析
在仿真实验中,航空信道采用假定的低空信道模型,对于低空宽带航空信道,可充分借鉴地面移动通信信道研究成果以及有关航空通信信道[10-11]的测量结果,将其分为停场、航行、近场等场景,此时,通信信道特点各有不同。一般地,当存在视距分量时,该场景可认为是一种莱斯信道;当不存在视距分量时,该场景可认为是一种瑞利信道。在不同场景下,飞行器接收信号的角度不同,方位功率谱分布呈现不均匀性,可由Jakes提出的多普勒“U”型功率谱改进得到。如图3所示,多普勒功率谱服从如下分布[10]:

 (10)
(10)

图2 带数字锁相环的快速收敛载波恢复修正的超指数判决反馈盲均衡器结构
Fig.2 Fast carrier recovery modified super-exponential iterative decision feed back blind equalization algorithm with digital phase-locked loop
其中: 是天线波束到达的最小角度,
是天线波束到达的最小角度, 是天线波束到达的最大角度。
是天线波束到达的最大角度。

图3 低空信道的多普勒功率谱
Fig.3 Doppler power spectrum of low level channel
在低空宽带无线通信系统中,存在较强的多径效应,如图4所示,多径信号分量的功率随其相对时延值的增大呈递减趋势,服从单边指数函数分布[11]:
 (11)
(11)
其中: 为延迟谱的斜率;
为延迟谱的斜率; 为信道最大时延。从图4可见:不同多径分量的时延是不同的,并且每条路径的时延都是随机分布的。
为信道最大时延。从图4可见:不同多径分量的时延是不同的,并且每条路径的时延都是随机分布的。
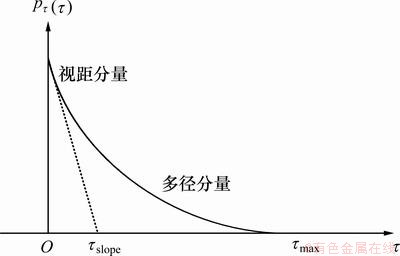
图4 低空信道的时延功率谱
Fig.4 Time delay power spectrum of low level channel
虽然低空宽带无线通信在不同的通信场景下的信道模型不尽相同,但是,其信道衰落根源是一致的,即功率衰减、多普勒频移和多径时延。基于WSSUS信道[12],低空宽带无线信道冲击响应为

 (12)
(12)
其中:t和 是特定的时刻和时间的增量;N为信道最大传播路径数;
是特定的时刻和时间的增量;N为信道最大传播路径数; ,
, 和
和 分别表示第n条路径的随机相位、多普勒频移和多径时延。用莱斯因子K来描述多径衰落的程度,当K→0时,莱斯信道退化为瑞利信道,此时是低空宽带无线通信最恶劣的情况。
分别表示第n条路径的随机相位、多普勒频移和多径时延。用莱斯因子K来描述多径衰落的程度,当K→0时,莱斯信道退化为瑞利信道,此时是低空宽带无线通信最恶劣的情况。
2.1 载波恢复性能比较
为检验FCRMSEI-DFE-DPLL2算法的载波恢复性能,将SEI-DFE,MSEI-DFE,MSEI-DFE-DPLL1和MSEI-DFE-DPLL2进行比较,同时考察上述算法的性能差异。
信道的仿真参数为:假定工作频率为1 GHz,数据传输速率为5 Mb/s,多径数目为20,调制方式为QPSK。飞行器速度为440 m/s,最大多径时延为33 μs,莱斯因子K=9 dB,天线波束宽度为3.5°。
算法的参数设置为:在仿真过程中,前馈均衡器采用中心抽头初始化,即 ;反馈均衡器采用全零初始化,即
;反馈均衡器采用全零初始化,即 。前馈均衡器权向量长为21,反馈均衡器权向量长为11。迭代步长μ=1×10-3,μ1=1×10-3,μ2=1×10-3,
。前馈均衡器权向量长为21,反馈均衡器权向量长为11。迭代步长μ=1×10-3,μ1=1×10-3,μ2=1×10-3, 5×10-3。采用256点数据计算均衡器输入信号的自相关矩阵。
5×10-3。采用256点数据计算均衡器输入信号的自相关矩阵。
图5所示为QPSK调制信号在信噪比为14dB情况下各算法的星座图。由图5(b)可见:在存在较大多普勒频移的情况下,SEI-DFE算法输出星座图具有连续相位旋转,均衡器无法正确恢复原始发射信号,输出严重误判,造成误码率增加。从图5(c)可见:MSEI-DFE算法与SEI-DFE算法相比,输出星座图相位缓和较大角度,但仍无法纠正低空信道的相位旋转。从图5(d)和图5(e)可见:MSEI-DFE算法分别使用一阶数字锁相环和二姐数字锁相环技术,在一阶数字锁相环作用下,均衡器输出星座能够明显分开,但仍存在一个固定的相位误差;而二阶数字锁相环作用下,均衡器输出星座图中相位旋转已经完全消除,二阶数字锁相环的跟踪性能明显由于一阶数字锁相环。从图5(f)可见:FCRMSEI-DFE-DPLL2算法对相位旋转和多普勒频移进行了很好补偿,相位旋转得到完全恢复,相比MSEI-DFE-DPLL2算法,输出星座图更加紧凑集中、清晰明了。
2.2 各算法的均方误差性能比较
均方误差是衡量均衡算法性能的重要评价指标,将输出端的均方误差[13]定义为
 (13)
(13)
其中: 为均衡器的输出
为均衡器的输出 被判决到离它最近的星座点。
被判决到离它最近的星座点。

图5 QPSK调制下各算法输出星座图
Fig.5 Output star maps of each algorithm under QPSK
为检验各种算法在航空系统中的性能,将SEI-DFE,MSEI-DFE,MSEI-DFE-DPLL1,MSEI-DFE- DPLL2和FCRMSEI-DFE-DPLL2等算法进行比较,仿真参数设置与前面的相同。
图6所示为在QPSK调制信号在信噪比为14 dB情况下各算法的均方误差曲线。从图6可见:对于多普勒频移较大、频率选择性衰落较强的快时变低空航空信道,SEI-DFE算法和MSEI-DFE算法均衡效果不理想,存在较大的均方误差,收敛性能较差,由于MSEI相比SEI增加了相位补偿功能,MSEI-DFE均衡效果稍好于SEI-DFE;引入锁相环技术改进的MSEI-DFE算法可以很好地实现载波相位跟踪,在实验开始阶段均方误差起伏性较大,随着迭代次数的增加,算法需要经过较短的调整就能达到稳定,MSEI-DFE-DPLL2算法相比MSEI-DFE-DPLL1算法具有稳健、收敛速度快的优势,收敛稳定时均方误差约提高7 dB;在收敛达到稳定时,FCRMSEI-DFE-DPLL2算法和MSEI-DFE- DPLL2算法均方误差基本相同,但FCRMSEI-DFE- DPLL2收敛速度比MSEI-DFE-DPLL2算法约快200点,比MSEI-DFE-DPLL1算法约快1 000点。

图6 各算法的均方误差性能比较
Fig.6 Mean square error comparison of each algorithm
2.3 各算法的误码率性能比较
图7所示为各算法在上述信道下仿真的误码率曲线。由图7可见:未采用数字锁相环技术的SEI-DFE算法和MSEI-DFE算法产生较高的误码率“平台效应”,不适合用于低空时变频率选择性信道均衡;在DPLL1作用下,虽然均衡器输出存在1个固定的相位误差,但是,仍然可以进行较正确判决,明显地降低了系统的误码率;采用DPLL2的算法误码率比DPLL1算法的误码率小,进一步改善检测性能,而且本文所提出的FCRMSEI-DFE-DPLL2算法相比MSEI-DFE- DPLL2算法,在误码率r为10-5时,信噪比约提高1 dB。

图7 各算法的误码率r特性曲线
Fig.7 Bit error rate curves of each algorithm
综合以上实验分析可以看出本文提出的FCRMSEI-DFE-DPLL2算法是一种有效恢复原始发射信号的判决反馈盲均衡算法。
3 结论
(1) 提出一种适合于QPSK信号的带二阶数字锁相环的快速收敛载波恢复修正超指数迭代判决反馈盲均衡算法,并通过低空宽带航空信道模型进行仿真,验证所提算法的有效性。新算法基于对修正超指数迭代算法误差函数的分析,根据归一化思想,得到新的、能够加快收敛速度的误差函数。
(2) 新算法不但可以实现载波恢复,克服信道的相位旋转,使均衡器输出星座图清晰、紧凑,而且收敛后均方误差较低,比现有的MSEI-DFE-DPLL2算法收敛速度快200点。误码率仿真结果证明:新算法可有效提高航空通信系统质量,对实现高可靠传输具有一定的应用价值。
参考文献:
[1] Heque J, Erturk M C, Arslan H. Aeronautical ICI analysis and Doppler estimation[J]. IEEE Communication Letters, 2011, 15(9): 906-908.
[2] 费满锋, 王杰令, 易克初, 等. 一种新颖的宽带地空通信系统方案[J]. 西安电子科技大学学报, 2008, 35(3): 403-408.
FEI Manfeng, WANG Jieling, YI Kechu, et al. Novel scheme for the wide band ground-air communication system[J]. Journal of Xidian University, 2008, 35(3): 403-408.
[3] 刘组军, 徐海生, 王杰令, 等. 一种新的混合信道盲均衡算法[J]. 电子与信息学报, 2009, 31(7): 1606-1609.
LIU Zujun, XU Haisheng, WANG Jieling, et al. A novel hybrid blind channel equalization algorithm[J]. Journal of Electronics & Information Technology, 2009, 55(1): 132-139.
[4] 张银兵, 赵俊渭, 郭业才, 等. 一种能有效消除水声信道相位连续旋转的分数间隔盲均衡算法研究[J]. 声学学报, 2010, 35(1): 59-67.
ZHANG Yinbing, ZHAO Junwei, GUO Yecai, et al. A fractionally-spaced blind equalization algorithm for eliminating continuous phase rotation of underwater acoustic channel[J]. Acta Acoustica, 2010, 35(1): 59-67.
[5] Shalvi O, Weinstein E. Super-exponential methods for blind equalization[J]. IEEE Trans Information Theory, 1993, 39(2): 505-519.
[6] 宁小玲, 刘忠, 罗亚松, 等. 一种改进的水声信道载波恢复盲均衡算法[J]. 西安电子科技大学学报, 2012, 39(1): 151-156.
NING Xiaoling, LIU Zhong, LUO Yasong, et al. Improved super-exponential iteration blind equalization algorithm for carrier phase recovery in underwater acoustic channels[J]. Journal of Xidian University, 2012, 39(1): 151-156.
[7] 王峰. 基于高阶统计量的水声信道盲均衡理论与算法[D]. 西安: 西北工业大学航空学院, 2003: 68-71.
WANG Feng. Blind equalization algorithms using higher-order statistics for underwater acoustic channel[D]. Xi’an: Northwestern Polyechnical University. Navigation Institute, 2003: 68-71.
[8] 张艳萍, 赵俊渭, 李金明. 一种快速收敛的水声信道载波恢复盲均衡算法[J]. 声学学报, 2006, 31(1): 74-78.
ZHANG Yanping, ZHAO Junwei, LI Jinming. A fast equalization algorithm for carrier recovery of underwater acoustic channel[J]. Acta Acoustica, 2006, 31(1): 74-78.
[9] Singer A C, Nelson J K, Kozat S S. Signal processing for underwater acoustic communications[J]. IEEE Communications Magazine, 2009, 47(1): 90-96.
[10] Erik. Haas. Aeronautical channel modeling[J]. IEEE Transactions on Vehicular Technology, 2002, 51(2): 254-264.
[11] 陈强, 杨霄鹏, 杨栋, 等. 低空无线信道建模及其均衡技术研究进展[J]. 电讯技术, 2012, 52(1): 117-124.
CHEN Qiang, YANG Xiaopeng, YANG Dong, et al. Research progress of low altitude wireless channel modeling and equalization techniques[J]. Telecommunication Engineering, 2012, 52(1): 117-124.
[12] Hoeher P. A statistical discrete-time model for the WSSUS multipath channel[J]. IEEE Transactions on Vehicular Technology, 1992, 41(4): 461-468.
[13] 张家琦, 葛宁. 联合CMA+DDLMS盲均衡算法[J]. 清华大学学报, 2009, 49(10): 1681-1683.
ZHANG Jiaqi, GE Ning. Joint CMA+DDLMS blind equalization algotirhm[J]. Journal of Tsinghua University, 2009, 49(10): 1681-1683.
(编辑 邓履翔)
收稿日期:2012-08-07;修回日期:2012-12-16
基金项目:国家自然科学基金资助项目(60972042);陕西省电子信息系统综合集成重点实验室基金资助项目(201104Y06)
通信作者:杨霄鹏(1973-),男,甘肃天水人,副教授,从事宽带无线通信及信号处理研究;电话:13572156129;E-mail: sdchairman@163.com

