Gravitational search algorithm for coordinated design of PSS and TCSC as damping controller
来源期刊:中南大学学报(英文版)2012年第4期
论文作者:M. Eslami, Professor A. Mohamed M. Khajehzadeh
文章页码:923 - 932
Key words:gravitational search algorithm; power system stabilizer; thyristor controlled series capacitor; tuning
Abstract: A newly developed heuristic global optimization algorithm, called gravitational search algorithm (GSA), was introduced and applied for simultaneously coordinated designing of power system stabilizer (PSS) and thyristor controlled series capacitor (TCSC) as a damping controller in the multi-machine power system. The coordinated design problem of PSS and TCSC controllers over a wide range of loading conditions is formulated as a multi-objective optimization problem which is the aggregation of two objectives related to damping ratio and damping factor. By minimizing the objective function with oscillation, the characteristics between areas are contained and hence the interactions among the PSS and TCSC controller under transient conditions are modified. For evaluation of effectiveness and robustness of proposed controllers, the performance was tested on a weakly connected power system subjected to different disturbances, loading conditions and system parameter variations. The eigenvalues analysis and nonlinear simulation results demonstrate the high performance of proposed controllers which is able to provide efficient damping of low frequency oscillations.
J. Cent. South Univ. (2012) 19: 923-932
DOI: 10.1007/s11771-012-1094-2![]()
M. Eslami, H. Shareef, A. Mohamed, M. Khajehzadeh
Department of Electrical, Electronic and Systems Engineering, University Kebangsaan Malaysia,Bangi 43600, Selangor, Malaysia
? Central South University Press and Springer-Verlag Berlin Heidelberg 2012
Abstract: A newly developed heuristic global optimization algorithm, called gravitational search algorithm (GSA), was introduced and applied for simultaneously coordinated designing of power system stabilizer (PSS) and thyristor controlled series capacitor (TCSC) as a damping controller in the multi-machine power system. The coordinated design problem of PSS and TCSC controllers over a wide range of loading conditions is formulated as a multi-objective optimization problem which is the aggregation of two objectives related to damping ratio and damping factor. By minimizing the objective function with oscillation, the characteristics between areas are contained and hence the interactions among the PSS and TCSC controller under transient conditions are modified. For evaluation of effectiveness and robustness of proposed controllers, the performance was tested on a weakly connected power system subjected to different disturbances, loading conditions and system parameter variations. The eigenvalues analysis and nonlinear simulation results demonstrate the high performance of proposed controllers which is able to provide efficient damping of low frequency oscillations.
Key words: gravitational search algorithm; power system stabilizer; thyristor controlled series capacitor; tuning
1 Introduction
When large power systems are interconnected by relatively weak tie lines in late 1950s, low frequency oscillations (LFOs) have been observed. These oscillations may sustain and grow to cause system separation if no adequate damping is available [1-2]. Such dynamic instabilities impose unnecessary limitations on power system operation. To provide fast damping for system and thus improve the dynamic performance, an auxiliary control signal in the excitation system and/or the governor system of a generating unit can be used. As the most cost-effective damping controller, power system stabilizer (PSS) has been widely used to suppress the LFO and enhance the system dynamic stability. The PSSs contribute in maintaining reliable performance of power system stability by providing a supplementary signal to the excitation system. Recently, the conventional lead/lag power system stabilizers (CPSSs) are extensively applied by power system utilities to damp out small oscillations. However, determining PSS parameters is a crucial step in the design process. A comprehensive analysis of the outcomes of various CPSS parameters is introduced on the overall system dynamic performance of power system. Generally, it is agreed that the appropriate selection of CPSS parameters results in satisfactory performance during system upset. With growing transmission line loading over long distances, the request of PSSs might, in some cases, not provide enough damping for the inter-area power oscillations in a multi-machine system. In these cases, other efficient resolutions are needed to be investigated. Flexible AC transmission systems (FACTS) devices are one of the recent plans to alleviate such conditions by controlling the power flow along the transmission lines and improving power oscillations damping [3-4]. The application of FACTS controllers enhances the flexibility of operation by providing more options to the power system operators. One of the series FACTS devices for transient stability improvement is the thyristor controlled series capacitor (TCSC), which allows quick and continuous changes of the transmission line impedance [5]. TCSC has immense potential and application in precisely regulating the power flow on a transmission line, mitigating the sub-synchronous resonance, improving the transient stability and damping inter-area power swings. TCSC controllers help in enhancing and controlling the power flow through a line in the steady state. However, the other significant characteristics of these controllers are their capabilities to be applied during the large disturbances like faults to improve the transient stability of a power system. Because of the ease of on-line tuning and in addition lack of assurance of the stability by some adaptive or variable structure methods, the power system utilities preferred a conventional lead-lag damping controller structure. On the other hand, it was shown that the suitable selection of the conventional lead-lag controller parameters results in efficient damping to LFOs. Unfortunately, the problem of the conventional power oscillation damping (POD) controller design is a multimodal optimization problem (i.e., there exists more than one local optimum). Thus, the conventional optimization methods are not appropriate for such a problem. Hence, it is needed that the meta-heuristic techniques, which are widely applied for the global optimization problems, are expanded.
The damping of the special modes of rotor oscillation may be increased and decreased by the interaction among controllers. If FACTS devices are used in the same area, this problem may happen particularly after the clearance of a critical fault. Furthermore, this problem can adversely influence the rotor damping of generators and for weakly interconnected system situations it can even limit the operating power range of the generators and dynamic instability. The coordinated design between PSSs and FACTS POD controllers has been subjects of a number of researches to improve the overall system performance [6-7]. Several studies are based on the complex nonlinear simulation, while the others are based on the linearized power system model.
In this work, a novel optimization algorithm based on the law of gravity, namely gravitational search algorithm (GSA) is applied to coordinating between PSSs and TCSC POD controllers simultaneously. This algorithm is based on the Newtonian gravity: ‘‘Every particle in the universe attracts every other particle with a force that is directly proportional to the product of their masses and inversely proportional to the square of the distance between them”. In GSA, the individuals are a collection of masses, which interact with each other based on the Newtonian gravity and the laws of motion. The GSA has been confirmed by higher performance in solving various nonlinear functions, compared with some well-known search methods [8]. In this work, the ability of proposed algorithm in power system for coordinating among PSSs and TCSC POD controllers is investigated. The problem of coordinated tuning is formulated as an optimization problem according to the eigenvalue-based multi-objective function in a wide range of operating conditions and GSA is used to solve it. The effectiveness of proposed controller is tested on a two-area four-machine power system under different operating conditions through the eigenvalue analysis and the nonlinear time simulation.
2 Gravitational search algorithm
Gravitational search algorithm (GSA) is a newly developed stochastic search algorithm based on the law of gravity and mass interactions. In GSA, the search agents are a collection of masses which interact with each other based on the Newtonian gravity and the laws of motion, completely different from other well-known population-based optimization method inspired by swarm behaviors in nature (such as particle swarm optimization (PSO), genetic algorithm (GA), and ant colony search algorithm). In GSA, agents are considered as objects and their performance are measured by their masses, and all these objects attract each other by the gravity force, while this force causes a global movement of all objects towards the objects with heavier masses [8]. The heavy masses correspond to good solutions of problem. In other words, each mass presents a solution, and the algorithm is navigated by properly adjusting the gravitational and inertia masses. By lapse of time, the masses will be attracted by the heaviest mass which presents an optimum solution in the search space.
To describe the GSA, considering a system with N agents (masses), the position of the i-th agent is defined by
![]() i=1, 2, …, N (1)
i=1, 2, …, N (1)
where ![]() presents the position of the i-th agent in the d-th dimension and n is the space dimension.
presents the position of the i-th agent in the d-th dimension and n is the space dimension.
According to Newton gravitation theory, at a specific time t, the force acting on the i-th mass from the j-th mass is defined as
![]() (2)
(2)
where Mi and Mj are masses of agents, and G(t) is the gravitational constant at time t, and ε is a small value.
Mi is calculated through comparison of fitness as
 (3)
(3)
where
![]() (4)
(4)
where fi(t) represents the fitness value of the agent i at t, and fbest(t) and fworst(t) are the best and worst fitness of all agent, respectively. They are defined as follows (for a minimization problem):
![]() (5)
(5)
![]() (6)
(6)
It is to be noted that for maximization, Eqs. (5) and (6) are changed to Eqs. (7) and (8), respectively:
![]() (7)
(7)
![]() (8)
(8)
For the i-th agent, the randomly weighted sum of the forces exerted from other agents:
![]() (9)
(9)
where Rj is a random number in the interval [0, 1].
Hence, by the law of motion, the acceleration of the agent i at time t in the d-th direction, ![]() is given as
is given as
![]() (10)
(10)
Then, the searching strategy on this concept can be described by following equations:
![]() (11)
(11)
![]() (12)
(12)
where Ri is a uniform random variable in the interval [0, 1]. This random number is applied to giving a randomized characteristic to the search; xid represents the position of the i-th agent in the d-th dimension; vid is the velocity and aid is the acceleration.
It must be pointed out that the gravitational constant G(t) is important in determining the performance of GSA and is defined as a function of time t:
![]() (13)
(13)
where G0 is the initial value, β is a constant, t is the current iteration, and tmax is the maximum iteration. The parameters of maximum iteration tmax, population size N, initial gravitational constant G0 and constant β control the performance of GSA.
According to the description above, the whole workflow of the gravitational search algorithm is shown as follows:
Step 1: Define the problem space and set the boundaries, i.e. equality and inequality constraints.
Step 2: Initialize an array of masses with random positions.
Step 3: Check if the current position is inside the problem space or not. If not, adjust the positions so as to be inside the problem space.
Step 4: Evaluate the fitness value of agents.
Step 5: Update G(t), fbest(t), fworst(t) and Mi(t) for i=1, 2, …, N.
Step 6: Calculate the total force in different directions and acceleration for each agent.
Step 7: Change the velocities according to Eq. (1).
Step 8: Move each agent to the new position according to Eq. (2) and return to Step 3.
Step 9: Repeat Step 4 to Step 8 until a stopping criterion is satisfied.
The high performance and the global search ability of GSA in solving various nonlinear functions infer from the results of experiments undertaken previously by Refs. [8-9]. As an excellent optimization algorithm, GSA has the potential to solve a broad range of optimization problems. In this work, GSA will be applied for simultaneous coordinated designing of the PSS and TCSC as a damping controller in the multi-machine power system.
3 Power system model
To demonstrate the application and robustness of GSA for the damping control design, a four-machine two-area study system is simulated. This two-area power system, introduced in Ref. [10] as a benchmark system for inter-area oscillations studies, consists of two generators in each area, connected via a 220 km tie line. The one-line diagram of the test system is shown in Fig. 1. All the generators are equipped with identical speed governors and turbines, which include exciters, automatic voltage regulators (AVRs), and two PSSs which are installed in Generators 1 and 3 (G1 and G3), and one TCSC is located between Buses 3 and 101. The generators and their controls are assumed to be identical. With 400 MW power flow from Area 1 to Area 2, the most critical contingency for this test system is the loss of a line between Buses 101 and 13. Without the supplementary controllers installed, a poorly damped mode with frequency of 0.62 Hz is excited following this disturbance [11]. The effects of installing power system stabilizers at G1 and G3 on the overall system damping were analyzed. The simple model shows the fundamental electromechanical oscillations that are inherent in interconnected power systems. There are three different electro-mechanical modes of oscillation, i.e., two local modes of oscillation corresponding to each area, and one inter-area mode.
3.1 Exciter and PSS
The IEEE type-ST1 excitation system is shown in Fig. 2 and can be described as
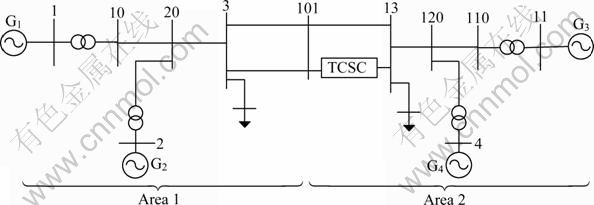
Fig. 1 Multi-machine power system with TCSC

Fig. 2 IEEE type-ST1 excitation system with PSS
![]() (14)
(14)
where KA and TA are the gain and time constant of the excitation system, respectively; Vref is the reference voltage; Efd is the excitation field voltage.
As shown in Fig. 2, a CPSS is installed in the feedback loop to generate a stabilizing signal uPSS. In Eq. (14), the terminal voltage can be expressed as
![]() (15)
(15)
![]() (16)
(16)
![]() (17)
(17)
where xq is the q-axis reactance of the generator. The basic function of a PSS is to extend stability limits by modulating generator excitation to provide damping to the oscillations between synchronous machines. Analytically, PSS may be regarded as a transfer function consisting of a PSS gain, wash-out and lead-lag. The lead-lag aims to provide appropriate phase, leading to compensation of the phase lag between excitation and the generator electrical torque.
3.2 TCSC modeling and basic control design
A TCSC has been placed in series with the parallel transmission lines to change the line flow. The thyristor controlled reactor (TCR) is shaped by a reactor in series with a bidirectional thyristor valve which is fired by a phase angle with a range between 90° and 180° with respect to capacitor voltage. The TCSC can be modeled as a variable reactance for the stability analysis and load flow investigations. In this modeling approach, the result of FACTS devices on the power flow is exhibited as a variable current injection at the terminal buses of lines. The power injection varies with FACTS control parameters. This procedure needs no improvement of bus admittance matrix during the power flow iterations [12]. The TCSC is assumed to be connected between buses i and j in a transmission line, as illustrated in Fig. 3, where the TCSC is simplified like a continuously capacitive controllable reactance. However, for the reason of improving a control approach, it is useful to have an injection model representation for the TCSC. Parameter Ise may be evaluated as
![]() (18)
(18)
where xl and xc represent the reactance of the transformer and in nominal reactance of the fixed capacitor c, respectively.

Fig. 3 TCSC located in transmission line
The effect of the capacitor is equivalent to a voltage source which depends on the voltages Vi and Vj. The current injection model of TCSC is achieved by replacing the voltage across the TCSC by an equivalent current source, Is, as shown in Fig. 4.
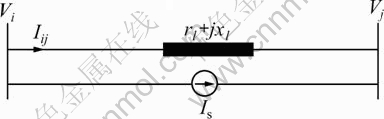
Fig. 4 Replacement of voltage source by current source
In Fig. 3, Vs=-jXcIse and from Fig. 4, we have
![]() (19)
(19)
Current source model of TCSC is presented in Fig. 5. Current injections into nodes i and j are evaluated as
![]() (20)
(20)
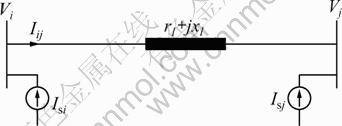
Fig. 5 Current injection model for TCSC
3.3 TCSC damping controller
The damping controller is designed to create an electrical torque in phase with speed deviation according to the phase compensation method. Currently, the conventional lead-lag controller is the most extensively adopted in industrial request due to its simple structure, easy to design and low cost. The structure of TCSC based damping controller is illustrated in Fig. 6. This controller may be considered as a lead-lag compensator. It comprises gain block, signal-washout block with the time constant Tw and two stages of the lead-leg compensator with time constants T1, T2 and T3, T4. The inductance of TCSC, XCSC, can be expressed as
![]() (21)
(21)
where Xref represents the desired degree of compensation; KC and TC are the gain and the time constant of the TCSC. As shown in Fig. 6, a conventional lead-lag controller is installed in the feedback loop to produce TCSC stabilizing signal uCSC. For the objective of coordinated design, the parameters of damping controllers are achieved by GSA. To damp the inter-area mode for this system, many input signals have been proposed for FACTS. Signals which carry invaluable information about the inter-area mode can be considered as the input signals. Since FACTS controllers are located in the transmission systems, local input signals are always preferred. For instance, line active power and current carry such valuable information. Transmission line active
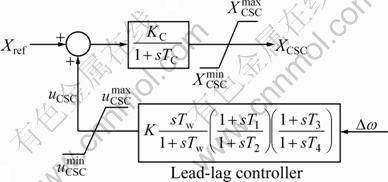
Fig. 6 Block diagram of TCSC damping controller
power has been suggested as an efficient input signal in Ref. [13] for series FACTS devices damping controller design. Here, the active power of the transmission line is chosen as the input signal.
3.4 Linearized model
The system analysis and controller designed to improve small signal stability margin may be carried out by means of linear models. Since the early 1970s, linear analysis techniques have been used to study the dynamic behavior of power systems. These techniques can provide valuable insights into the dynamic characteristics of a power system, which are not easily attainable from time domain simulations alone. The standard industry approach to power system modeling for controller design has been based on a set of nonlinear differential algebraic equations in the form of
![]() (22)
(22)
where x and u are the state vector and input vector, respectively; y is the output vector; f and g are the nonlinear functions. After linearizing the system model equations around an operating point, a single linear time invariant (LTI) model is obtained, in the form of
![]() (23)
(23)
![]() (24)
(24)
where ![]() is a vector composed by the deviations of the system state variable (with respect to a nominal operating point);
is a vector composed by the deviations of the system state variable (with respect to a nominal operating point); ![]() is a vector with the system control input (which corresponds to the stabilizing signals to be added to the AVR and TCSC inputs);
is a vector with the system control input (which corresponds to the stabilizing signals to be added to the AVR and TCSC inputs); ![]() is the vector with the system outputs (in this case, chosen as the rotor speed deviations for the PSS-type controllers and the active power flow across the transmission line for TCSC supplementary damping controller). Controller designs for power systems are usually based on output feedback, since not all the model state variables are available for direct measurement in the real system.
is the vector with the system outputs (in this case, chosen as the rotor speed deviations for the PSS-type controllers and the active power flow across the transmission line for TCSC supplementary damping controller). Controller designs for power systems are usually based on output feedback, since not all the model state variables are available for direct measurement in the real system.
For this reason, the proposed damping controllers (PSS-type and TCSC damping controller) are based on the dynamic output feedback structure. The controller is a lead-lag type described by
V(s)=K(s)y(s) (25)
where K(s) is the transfer function of the controller, y(s) is the measurement signal and V(s) is the output signal from the controller which will provide additional damping by moving modes to the left. Such control structure can be represented by a linear equation set, in state space form, as
![]() (26)
(26)
u=Ccxc (27)
where ![]() is the state vector of the controller.
is the state vector of the controller.
The closed loop description of controlled system formed by the feedback connection of Eqs. (23)-(24) and Eqs. (26)-(27) may be represented by
 (28)
(28)
where ![]() is a vector containing the states of both the system and the controller;
is a vector containing the states of both the system and the controller; ![]() is the state matrices of the closed loop system, and Ac, Bc and Cc are the matrix variables to be determined by the design procedure. The goal of the PSS design is to place the eigenvalues of matrix ? in the left half of the complex plane.
is the state matrices of the closed loop system, and Ac, Bc and Cc are the matrix variables to be determined by the design procedure. The goal of the PSS design is to place the eigenvalues of matrix ? in the left half of the complex plane.
The use of the polytopic modeling in the design procedure, associated with the quadratic stability theory, guarantees the stabilization of the closed loop system, not only for the operating points used in the construction of the polytopic system, but also for all the operating points that can be generated from the convex combination of the adopted operating points [14-15]. In design of damping controllers, it is not sufficient to request only the system stability, since the closed loop system may be stable but with unsatisfactory performance (in this case, poorly damped oscillation modes). In this way, specifying a performance index in the design stage is a usually adopted procedure in controller design. In this work, the damping ratio and damping factor for the oscillation modes of the closed loop polytopic system are used as performance index in the design stage, since such performance index is universally accepted in power systems as an indicative of small signal stability margin.
Let ![]() be the i-th eigenvalue (mode) of the closed loop matrix ?. Then, the damping ratio (ξi) of the i-th eigenvalue is defined as
be the i-th eigenvalue (mode) of the closed loop matrix ?. Then, the damping ratio (ξi) of the i-th eigenvalue is defined as
![]() (29)
(29)
4 Proposed design approach
4.1 Structure of controllers
A conventional lead-lag controller structure for both GSA-PSS and GSA-TCSC is considered in this work as shown in Figs. 2 and 6. The stabilizing signal of proposed controllers can be expressed as
![]() (30)
(30)
![]() (31)
(31)
Parameters determined by GSA procedure are controller gain K, and lead-leg time constants T1, T2, T3 and T4. Washout time constants are kept fixed during the optimization. The speed deviation ω is available and used as the input signal to both PSS and TCSC controllers. This makes the proposed controllers easy for on-line implementation.
4.2 Problem formulation
In the proposed method, one must tune the PSS and TCSC controller parameters optimally to improve overall system dynamic stability in a robust way under different operating conditions and disturbances. To acquire an optimal combination, this work employs GSA to improve optimization synthesis and find the global optimum value of fitness function. To increase the damping of electromechanical modes, an eigenvalue based multi-objective function reflecting the combination of damping factor and damping ratio is considered as
![]() (32)
(32)
![]() (33)
(33)
where j=1, 2, 3, …, NP, is the index of system operating conditions considered in this design process; i=1, 2, …, N, is the index of eigenvalues in the system; σij and ζij are the damping factor and the damping ratio of the i-th eigenvalue of the j-th operating condition. The value of α is a weight for combining both damping factors and damping ratios. Finally, σ0 and ζ0 are the constant values of expected damping factor and damping ratio, respectively. By optimizing F, closed loop system poles are consistently pushed further left of the jω axis with simultaneous reduction in real parts, too. Thus, enhancing relative stability and increasing the damping ratio over the ζ0 is achieved. The design problem can be formulated as the following constrained optimization problem, where the constraints are the POD controller parameter bounds:
![]() (34)
(34)
The proposed approach employs the GSA to solve this optimization problem and search for an optimal set of power damping controller parameters. It is emphasized that with this procedure, robust stabilizer, able to operate satisfactorily over a wide range of operating conditions, is obtained. The optimization of PSS and TCSC controller parameters is carried out by evaluating the objective function as given in Eq. (33) which considers a multiple of operating conditions. The ranges of optimized parameters are [0.1, 200] for K (KPSS and KTCSC), and [0.01, 1] for T1-T4. These limits help in reducing the computational times significantly. The proposed approach employs GSA to solve this optimization problem and search for the optimal set of PSSs and TCSC parameters. Since there are two PSSs and one TCSC, fifteen parameters need to be optimized. It is emphasized that with this procedure, robust stabilizer, able to operate satisfactorily over a wide range of the operating conditions, is obtained.
4.3 Application of GSA
The GSA algorithm has been applied to above optimization problem to search for the optimal setting of proposed controllers. The implementation procedure of proposed GSA for coordinated designing is presented as a flowchart in Fig. 7. To analyze the low frequency oscillations in the system, two system configurations are studied:
1) Operating condition 1: System with two lines between Buses 3 and 101;
2) Operating condition 2: System with a single line between Buses 3 and 101.
The optimization procedure is terminated when one of the following stopping criteria is met: 1) the maximum number of iterations is reached; 2) after a given number of iterations, there is no significant improvement of the solution.
5 Simulation results
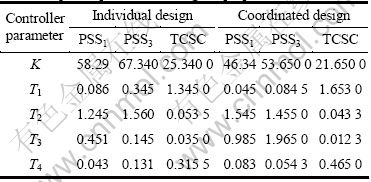
To demonstrate the application and robustness of GSA in coordinated designing, the two-area multi-machine power system is simulated. In this work, proper fine tuning of GSA parameters is evaluated by several experimental studies examining the effect of each parameter on the final solution and convergence of algorithm. As a result, parameters of GSA are set as: population size is 50, iteration number is 1 000, G0=100 and β=10. In our implementation, the values of σ0 and ξ0 are taken as -1 and 0.2, respectively. The weight parameter a is set to be 10, which is derived from the experiences of many experiments conducted on this problem. The final values of the optimized parameters are listed in Table 1.
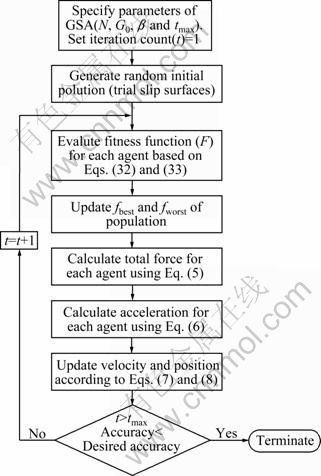
Fig. 7 Flowchart showing application of GSA for coordinated designing
Table 1 Optimal parameter settings of proposed controllers
The principal eigenvalues and the damping ratios obtained under all operating conditions without and with the proposed controllers are given in Table 2. For the system without controller, it can be observed that some of the modes are weakly damped and for some operating conditions the system is unstable. It is clear that the system stability is greatly enhanced by proposed controllers. The results from coordinated design approach show that the minimum damping ratio and the maximum damping factor under all cases are better than the results obtained by uncoordinated design. After the optimized coordinated tuning of PSS/TCSC controllers, all the electro-mechanical modes are well damped and the detrimental effects due to PSS/TCSC interactions are suppressed. Furthermore, It is quite obvious that the proposed controllers outperform the GA and shift substantially the electro-mechanical mode eigenvalues to the left of the line s=-1.0 in the s-plane. This greatly enhances the system stability and improves the damping characteristic of electromechanical mode. This shows that using GSA is an effective approach to enhance the global searching capability and improve the performance stability.
Table 2 Eigenvalues and damping ratios with and without controllers

In addition, the fitness value versus iteration characteristics for each algorithm is illustrated in Fig. 8. Here, the fitness corresponds to the average fitness of the ten trials. Figure 8 confirms the success of the optimization process by using GSA algorithm.

Fig. 8 Comparison of performance of GSA and GA for minimization of F
The effectiveness and robustness of performance of proposed controller under transient conditions is verified by applying a three-phase fault of 200 ms duration at the middle of one of the transmission lines between Buses 3 and 101. To evaluate the performance of the proposed simultaneous design approach, the response with the proposed controllers is compared with the response of PSS and TCSC damping controller individual design. The speed deviations of generators G1 and G3 for all cases are shown in Figs. 9 and 10, respectively. Furthermore, the oscillations in the machine angles, voltage magnitude and field voltages of all the generators for the base case without and with the proposed controllers are given in Figs. 11-13. It is observed that, with the proposed method, the oscillations are damped. These time domain simulations agree well with the results of eigenvalue analysis.
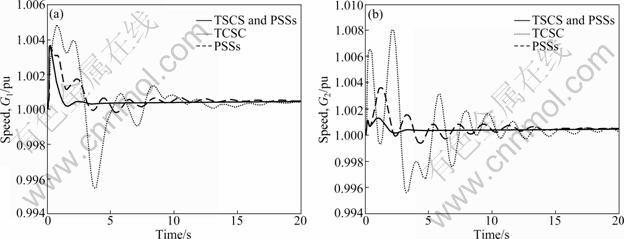
Fig. 9 Speed response for Case 1: (a) Without controllers; (b) With coordinated controllers

Fig. 10 Speed response for Case 2: (a) Without controllers; (b) With coordinated controllers
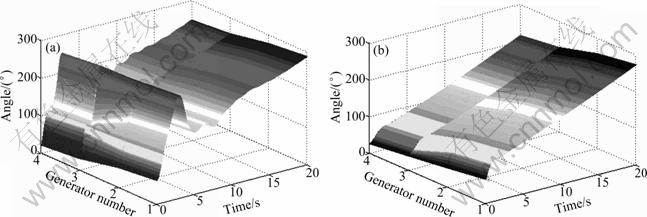
Fig. 11 Machine angles of all generators in three-dimensional chart: (a) Without controllers; (b) With coordinated controllers

Fig. 12 All bus voltage magnitudes in three-dimensional chart: (a) Without controllers; (b) With coordinated controllers

Fig. 13 Field voltages of all generators: (a) Without controllers; (b) With coordinated controllers
It is clear from these figures that, the simultaneous design of PSS and TCSC damping controller by proposed approach significantly improves the stability performance of example power system and low frequency oscillations are well damped out. The proposed controllers have been tested on a weakly connected power system with different loading conditions. The eigenvalue analysis and non-linear simulation results show the effectiveness and robustness of proposed controllers to enhance the system stability. It is clear that the newly proposed method is quite efficient to damp out the local modes as well as the inter-area modes of oscillations. This illustrates the potential and superiority of proposed design approach to get the optimal set of PSS parameters.
6 Conclusions
1) A gravitational search algorithm for the simultaneous coordinated tuning of the TCSC damping controller and PSS in multi-machine power system is presented. The proposed method is classified as direct search algorithm and does not require any continuity or derivative of the objective function. The problem of selecting PSS and TCSC damping controller parameters in order to enhance the damping of power oscillations for a set of operating conditions is posed to an optimization problem.
2) For the proposed stabilizer design problem, a multi-objective function, where the objective is the aggregation of two objectives on the damping ratio and damping factor to increase the system damping, is developed. Then, the gravitational search algorithm has been successfully applied to finding the optimal solution of the design problem. The effectiveness of the proposed controller has been tested on a four-machine power system through the simulation studies under different operating conditions.
3) The eigenvalue analysis and nonlinear simulation results demonstrate the effectiveness and robustness of the proposed controllers and their ability for damping low frequency electromechanical oscillations as well as improving system voltage profile. The performance of proposed stabilizers is also compared with that of GA and it is shown that the proposed controllers outperform the GA and shift substantially the electro-mechanical mode eigenvalues to the left of the s-plane. The results show that the presented algorithm has a fast convergence rate with high degree of accuracy rather than genetic algorithm.
References
[1] BASLER M J, SCHAEFER R C. Understanding power-system stability [J]. IEEE Transactions on Industry Applications, 2008, 44(2): 463-474.
[2] ESLAMI M, SHAREEF H, MOHAMED A. Power system stabilizer design using hybrid multi-objective particle swarm optimization with chaos [J]. Journal of Central South University of Technology, 2011, 18(5): 1579-1588.
[3] GYUGYI L, HINGORANI N G. Understanding FACTS: Concepts and technology of flexible AC transmission systems [M]. New York: Willey John & Sons, Incorporated, 1999.
[4] ESLAMI M, SHAREEF H, MOHAMED A. Application of PSS and FACTS devices for intensification of power system stability [J]. International Review of Electrical Engineering, 2010, 5(2): 552-570.
[5] JOVCIC D, PILLAI G. Analytical modeling of TCSC dynamics [J]. IEEE Transactions on Power Delivery, 2005, 20(2): 1097-1104.
[6] ESLAMI M, SHAREEF H, MOHAMED A, KHAJEHZADEH M. Particle swarm optimization for simultaneous tuning of static var compensator and power system stabilizer [J]. Electrical Review, 2011, 87(9a): 343-347.
[7] CAI L J, ERLICH I. Simultaneous coordinated tuning of PSS and FACTS damping controllers in large power systems [J]. IEEE Transactions on Power Systems, 2005, 20(1): 294-300.
[8] RASHEDI E, NEZAMABADI-POUR H, SARYAZDI S. GSA: A gravitational search algorithm [J]. Information Sciences, 2009, 179(13): 2232-2248.
[9] KHAJEHZADEH M, TAHA M R, ELSHAFIE A, ESLAMI M. A modified gravitation search algorithm for slope stability analysis [J]. Engineering Applications of Artificial Intelligence, 2012. (in Press)
[10] ROGERS G. Power system oscillations [M]. Boston: Kluwer Academic Pub, 2000: 311-314.
[11] HASANOVIC A, FELIACHI A, BHATT N, DEGROFF A. Practical robust PSS design through identification of low-order transfer functions [J]. IEEE Transactions on Power Systems, 2004, 19(3): 1492-1500.
[12] SHAYEGHI H, SAFARI A, SHAYANFAR H. PSS and TCSC damping controller coordinated design using PSO in multi-machine power system [J]. Energy Conversion and Management, 2010, 51(12): 2930-2937.
[13] LARSEN E, SWANN D. Applying power system stabilizers. Part I: General concepts [J]. IEEE Transactions on Power Apparatus and Systems, 1981, PAS-100 (6): 3017-3024.
[14] RAMOS R A, ALBERTO L F, BRETAS N G. A new methodology for the coordinated design of robust decentralized power system damping controllers [J]. IEEE Transactions on Power Systems, 2004, 19(1): 444-454.
[15] RAMOS R A, BRETAS N G, ALBERTO C. Damping controller design for power systems with polytopic representation of operating conditions [C]// IEEE Power Engineering Society Winter Meeting. IEEE, 2002: 1517-1521.
(Edited by DENG Lü-xiang)
Foundation item: Project(UKM-DLP-2011-059) supported by the National University of Malaysia
Received date: 2011-06-21; Accepted date: 2011-10-20
Corresponding author: M. Eslami, Professor, PhD; Tel: +60-173274391; E-mail: mahdiyeh_eslami@yahoo.com

