A novel explosion-proof walking system: Twin dual-motor drive tracked units for coal mine rescue robots
��Դ�ڿ������ϴ�ѧѧ��(Ӣ�İ�)2016���10��
�������ߣ��컪 ����̶ ���� ����
����ҳ�룺2570 - 2577
Key words��coal mine; rescue robot; tracked walking system; explosion-proof; control strategy
Abstract: A new explosion-proof walking system was designed for the coal mine rescue robot (CMRR) by optimizing the mechanical structure and control algorithm. The mechanical structure innovation lies mainly in the dual-motor drive tracked unit used, which showed high dynamic performance compared with the conventional tracked unit. The control algorithm, developed based on decision trees and neural networking, facilitates autonomous switching between ��Velocity-driven Mode�� and ��Torque- driven Mode��. To verify the feasibility and effectiveness of the control strategy, we built a self-designed test platform and used it to debug the control program; we then made a robot prototype and conducted further experiments on single-step, ramp, and rubble terrains. The results show that the proposed walking system has excellent dynamic performance and the control strategy is very efficient, suggesting that a robot with this type of explosion-proof walking system can be successfully applied in Chinese coal mines.
J. Cent. South Univ. (2016) 23: 2570-2577
DOI: 10.1007/s11771-016-3318-3

LI Yu-tan(����̶), ZHU Hua(�컪), LI Meng-gang(����), LI Peng(����)
School of Mechatronic Engineering, China University of Mining and Technology, Xuzhou 221116, China
 Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Abstract: A new explosion-proof walking system was designed for the coal mine rescue robot (CMRR) by optimizing the mechanical structure and control algorithm. The mechanical structure innovation lies mainly in the dual-motor drive tracked unit used, which showed high dynamic performance compared with the conventional tracked unit. The control algorithm, developed based on decision trees and neural networking, facilitates autonomous switching between ��Velocity-driven Mode�� and ��Torque- driven Mode��. To verify the feasibility and effectiveness of the control strategy, we built a self-designed test platform and used it to debug the control program; we then made a robot prototype and conducted further experiments on single-step, ramp, and rubble terrains. The results show that the proposed walking system has excellent dynamic performance and the control strategy is very efficient, suggesting that a robot with this type of explosion-proof walking system can be successfully applied in Chinese coal mines.
Key words: coal mine; rescue robot; tracked walking system; explosion-proof; control strategy
1 Introduction
The coal mine is an environment rife with methane (CH4), carbon monoxide (CO), nitrogen dioxide (NO2), hydrogen sulfide (H2S), sulfur dioxide (SO2), and dust; all are dangerous to some degree, but methane (CH4) and dust show a particularly dangerous propensity for explosion. Coal mine gas and dust explosions are a major source of accidents (and thus a major threat to the safety of mine personnel.) Many countries have set strict safety standards for mining electrical equipment in effort to eliminate explosions, including the American NEC series, European EN500 series, and Chinese GB3836 series. Owing to carelessness or other factors, explosions still do happen. Coal mine rescue robots (CMRRs) have been developed to replace human workers to detect environmental information (including methane, carbon monoxide, oxygen, temperature, humidity, and wind speed levels) in coal mine roadways after a mine gas or coal dust explosion.
Many different countries across the world have developed CMRRs. For example, the Ratler mine detection robot [1] was developed by the American mine safety and health administration (MSHA), and the Simbot mine search robot [2] was developed by the University of South Florida. The V2 mine rescue robot [3] was developed by the Remotec Company, and the Groundhog robot [4] and Cave Crawler robot [2] were developed by Carnegie Mellon University. The KQR48 mine disaster area surveillance measuring robot [5] was developed by the Kaicehng Group in China, and the CUMT series mine environment detection rescue robots [6] were developed by the China University of Mining and Technology. Unfortunately, the public information available for these robots indicates that none have been successfully applied in coal mine rescues. The CMRR walking mechanism is particularly problematic. During the 2006 West Virginia Sago Mine disaster, for example, the US Department of Labor sent a rescue robot into the mine that was nearly immediately trapped in coal slime and had to be lifted out manually by the miners.
Mine equipment absolutely must be explosion- proof, indeed, this is its most important characteristic. Mine equipment mass and volume are relatively large after explosion-proofing; however, as are CMRRs; this is important because mass and volume have sizable impact on dynamic performance. A lightweight and effective walking system is the key to successful CMRR performance. We have researched a wide array of walking mechanisms and driving methods in effort to develop a suitable CMRR walking system, including the leg walking mechanism used by the American Ambler robot [7], the Spanish SILO4 robot [8], and the Boston Dynamics company��s BigDog robot [9]. We also have investigated space robots with six-wheeled rocker suspension structure including the Sojourner rover [10], the CNES of IARES-L planetary vehicles [11], the Chinese Chang��e-3 Inspector [12], and others. Some robots use a simple pendulum arm and double pendulum arm, including anti-terrorism and police tracking robots such as the Chinese ��Spirit Lizard�� series EOD robots [13], the US Anti-Terror urban robot [14], and the German Police Teodor robot [15]. We have attempted to apply all these different walking mechanisms in CMRRs, but the results have not been ideal�Ceither the mechanism is so complex that the explosion treatment cannot be carried out at all, or the weight and volume of the robot is excessive after the explosion treatment and negatively impacts walking performance.
In short, current walking mechanisms cannot be directly applied in CMRRs. A proper CMRR walking system must have three characteristics: explosion-proof (which is paramount,) simple structure (which makes explosion-proofing easier,) and excellent dynamic performance (including large driving force and rapid walking speed). These conditions altogether ensure that the CMRR successfully reaches the disaster site.
2 Mechanism design
We designed the proposed mechanism by optimizing both the walking mechanism and the explosion-proofing. There were three common walking mechanisms to choose from: the wheel walking mechanism, the tracked walking mechanism, and the leg walking mechanism. We selected the tracked walking mechanism for our CMRR after analyzing the advantages and disadvantages of each mechanism in terms of terrain adaptive capacity and mechanism complexity; the concrete structure was then designed accordingly.
2.1 Explosion-proof motor design
The brushless-DC-motor (BLDC) is typically used as the drive source for robots; however, the common BLDC motor cannot be directly utilized in CMRRs due to safety concerns. We flame-proofed the drive motors to solve this problem by creating a welded steel plate insulation shell that can withstand pressure up to 1 MP released from a gas explosion, including an explosion- proof surface, through-wall terminal, cable entry devices, and other main features. After treatment, the drive was a suitable independent power unit. The explosion-proof- treated motor structure is depicted in Fig. 1.
2.2 Dual-motor drive tracked unit design
After preliminary CMRR modeling, we estimated the mass of the robot at approximately 400 kg. Our goal was for the CMRR��s top speed to reach 1 m/s and its maximum climbing angle to reach 30��. Under the above conditions, we expected to be able to easily calculate the minimum power that the robot needed to meet dynamic demands. A tracked walking system usually contains two tracked units, each of which must provide 1500 W power��the size and mass of a 1500 W motor are so large, though the robot would not have enough space to house it. We changed the drive type of the ordinary tracked unit accordingly.
The conventional tracked unit is single-drive, consisting of a driving motor, driving wheel, guiding wheel, propping wheels, and tracks; the front wheel is the guiding wheel and the back wheel is the driving wheel. We instead created a dual-motor drive tracked unit in which the guiding wheel is also the driving wheel. The dual-motor drive tracked unit consisted of two identical driving systems, each equipped with an explosion-proof motor, a driving wheel, and a bevel transmission system. The proposed structure is shown in Fig. 2.
In order to distinguish the two drive systems, the subscript index ��f�� represents the front drive system and the subscript index ��b�� represents the back drive system,while each drive system is represented by identical variables. Therefore, the final output results of the front drive system maximum torque Tfm, the back drive system maximum torque Tbm, the front drive system maximum output speed ��fm, and the back drive system output speed ��bm. can be obtained as follows:
 (1)
(1)
where if and ib represent the transmission ratios of each tracked system; Tr is the rated torque of the motor; nr is the rated speed of the motor; and Dd is the diameter of the front drive wheel and the back drive wheel.
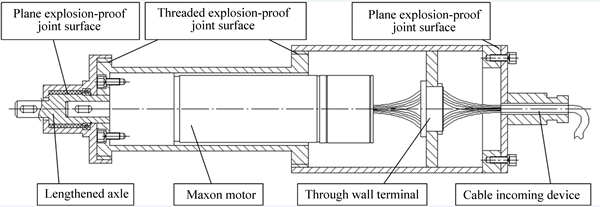
Fig. 1 Explosion-proof-treated motor structure
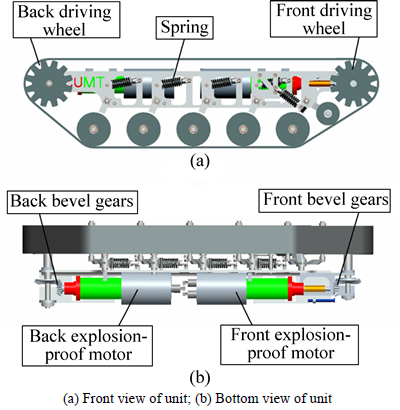
Fig. 2 Basic structure of dual-motor drive tracked unit:
In general, similar to a high-power, dual-drive belt conveyor, the final speed of the two drive systems must be identical; accordingly, we deduced if=ib. At this moment, the maximum output torque Ts1 and maximum output speed ��s1 can be expressed as follows:
 (2)
(2)
However, if if ��ib, then ��fm �٦�bm. At this point, the maximum output torque should be equal to the sum of the two drive systems�� torques while the maximum output speed is equal to the maximum value of the two drive systems�� speeds. Supposing if=4ib, the maximum output torque Ts2 and the maximum output speed ��s2 can be expressed as follows:
 (3)
(3)
By comparing Eqs. (2) and (3), it is clear that the maximum output torque Ts2 is 2.5 times the maximum output torque Ts1 in the case of the same maximum output speed ��s1(��s2) and the same motor parameters. But, if if��ib, the two drive units have different final linear speed��it is especially likely that the front drive system would have the highest speed. Therefore, we needed to change the mechanical structure to make the two drive systems work together effectively. We installed an overrunning clutch in the back drive system to ensure that the two drive systems had identical output speed (Fig. 3).
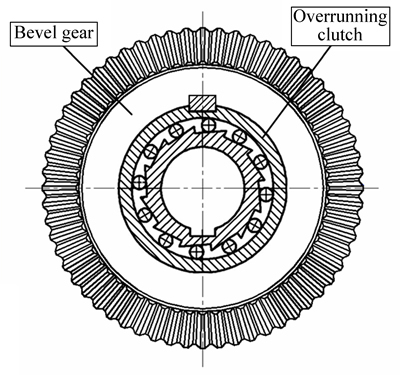
Fig. 3 Structure of back drive bevel gear
We set the transmission ratio of the front drive system below that of the back drive system so that the front drive system would have a greater speed and smaller torque than the back drive system. This allowed us to deduce the two work modes of the drive unit. When roads have favorable status, the robot must process a high speed to reach the disaster area as quickly as possible��in such a case, the front driving wheel works and the back driving wheel does not. We defined this work mode as ��velocity mode��. For roads that have been destroyed in an explosion, the robot must process a large torque��in this case, both two drive systems work and the speed is subject to the back drive system. We defined this work mode as ��torque mode��.
We installed springs in each support wheel to mitigate the vibration caused by the road surface to protect the robot��s electronic devices. This completed the structural design of the dual-motor drive tracked unit.
3 Control strategy
For the entire walking system with the two dual- motor drive tracked units, there must be independent control of four drive motors: the front drive motor output speed of the left side system was set to nlf and the back drive motor output speed of the left side system to nlb while the front and back of the right drive system were nrf and nrb, respectively. This allowed us to establish the robot motion control strategy shown in Table 1.
It is fairly easy to recognize whether the robot needs to turn, moves forward, or moves backward according to the cameras installed on the robot, but the amount of
Table 1 Robot motion control strategy
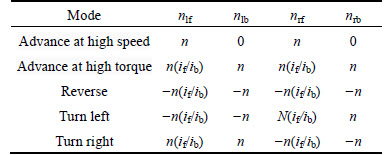
driving force necessary on different terrains cannot be judged by the cameras; the robot must automatically identify the road conditions and switch driving strategies as necessary. We designed the robot��s control strategy to automatically switch modes based on the terrain. The control strategy of either dual-motor drive tracked unit was the same, so we��ll only discuss one side of the walking system here.
The output speed of the front drive wheel was set to ��f(t), driving torque to Tf(t), comparison current value to If, and the amount of rotational speed control to Nf(t) with the maximum value of Nfm. The output speed of the back drive wheel was set to ��b(t), driving torque to Tb(t), comparison current value to Ib, and the amount of rotational speed control to Nb(t) with the maximum value of Nbm. External resistance was set to fr(t), and the ratio of the front drive system��s total transmission ratios to the back drive system total transmission ratios to i.
The robot encounters coalslime, slopes, steps, and other manner of paths as it moves across its trajectory. Changes in the robot��s path essentially reflect continuous changes in external resistance fr(t). The continuous change of fr(t) corresponds to changes in drive motor current, so the drive motor current i(t) can be used to characterize external resistance fr(t). Drive motor current can be read directly from the motor, so additional sensors for fr(t) were unnecessary.
The detailed control strategy for our robot is as follows:
When fr(t)
The proposed control system, which was built according to the design principle of a decision tree, has two decision layers: an input layer and an output layer. The input layer and decision layers have appropriate data processing functions and decision-making functions. We also employed the threshold principle inherent to neural networks to assist decision-making functions.
The proposed system uses the drive motor��s current information to switch between different operating modes; the motor current is nonlinear and time-varying, thus, we needed to define a stability condition: we set the motor current to i(t), then if i(t), i(t-��)��i(t-k����), (k, ����N) are all on one side of the comparison current I1(I2), the system was considered stable.
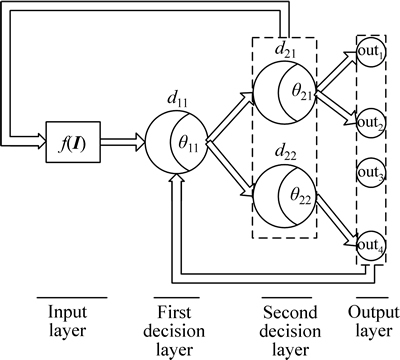
Fig. 4 Control strategy structure
The input of the input layer is the current matrix of the front driving motor or the back driving motor, which is determined by the output of the first decision layer. A concrete manifestation of the current matrix is reflected in Eq. (4), where iab is an element value of the current matrix I. If the interval time is ��t, the value of iab is equal to ((a-1)��n+b)����t. The row values of the matrix provide an average��after operation of f(I), the current mean matrix Iave can be obtained. The columns of the matrix values are then used to judge the stability of the motor.
 (4)
(4)
The average treatment of the input layer is given by
 (5)
(5)
The inputs to the first decision layer are Iave and the result from the output layer represents motor control matrix N. The two inputs combined form the first layer input matrix as follows:
 (6)
(6)
The decision function is expressed as
 (7)
(7)
For the system using this drive unit, the threshold of the first decision is ��11=0. The data flow and the output results of the first decision layer are then calculated accordingly:
 (8)
(8)
The element absolute value of Q2i can be determined by the test, experience or the rated current of the motor. But it should be an negative number according to Eq. (9).
In Eq (8), Iave is the output results; t>0 is the judging condition; and d21(d22) is the data flow.
The input of the second decision layer is the output of the first decision layer; its decision function is expressed as
 (9)
(9)
Next, define the data flow and the output results of the second decision layer��s decision unit d21:
 (10)
(10)
Then define the flow of data and the output results of the second decision layer��s decision unit d22.
 (11)
(11)
4 Experiment
4.1 Self-designed test platform experiment
We developed a test system in the laboratory to simulate the dual-drive tracked unit, then used it to debug the initial program and recorded the necessary data. The test system is shown in Fig. 5 and related parameters are listed in Table 2.
We used the control cabinet to control the braking torque of the magnetic particle brake and simulated different terrains by exporting different braking torques; the control program was run on a computer. During testing, braking torque was slowly increased to the theoretical switching threshold value and maintained for a period of time, then dropped suddenly to define the control program for the slope signal and step signal response. Magnetic powder brake braking torque can only slowly increase. The external resistance increased from 5 N��m to 25 N��m then suddenly dropped to 5 N��m, and the speed of the tracked unit changed from 62 r/min to 20 r/min then to 62 r/min. As shown in Fig. 6, we found that when the external resistance changed, speed did not change immediately��only when external resistance reached the threshold, the speed started to change until finally stabilizing. The ��t in Fig. 6 was controlled by the stability condition.
4.2 Prototype experiment
The test platform, as mentioned above, facilitated initial program debugging and data recording. Though the resistance could only slowly increase, which restricted our ability to imitate various topographic conditions, we built a prototype for further testing to solve this problem. The CMRR prototype is in the process of applying a safety sign in a Chinese coal mine, so test was carried out only according to a trajectory across the ground. We simulated varying degrees of terrain difficulty by running the prototype across single-step, slope, and rubble test sites. The robot prototype��s parameters are listed in Table 3.
The single-step test procedure is shown in Fig. 7. This terrain simulation was used to detect the effectiveness of the robot control program for mutated signals. The height of the step was 150 mm, and the pavement was rigid. At the beginning of the test, the robot worked in Velocity Mode; when its front driving wheel contacted the step, the torque provided by the front drive system was not sufficient to cross the step, so the motor current increased. Once the current reached the threshold and met the stability condition, the drive mode switched to Torque Mode. Once the robot crossed the step and again met the stability condition, it switched back to Velocity Mode.
The slope test process is shown in Fig. 8. This test was used to detect the effectiveness of the robot control program under disturbance. The road was soft and the external resistance changed continuously. Although the current changed constantly along with changes in external resistance, the variation in current did not satisfy the switching condition, so the robot worked in velocity mode until it reached the slope edge. As soon as the stability condition was satisfied, the robot switched to torque mode; once the robot crossed the slope and again met the stability condition, it switched back to velocity mode.
Table 3 Robot prototype parameters

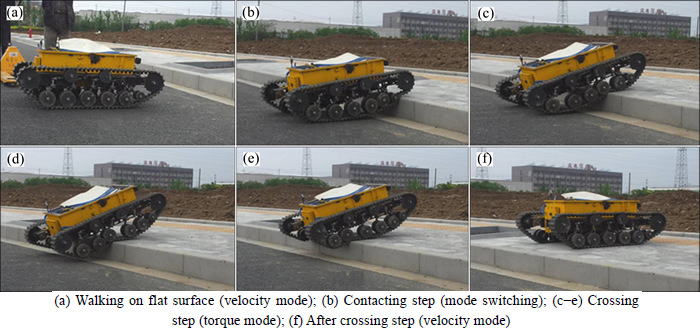
Fig. 7 Single-step test process:
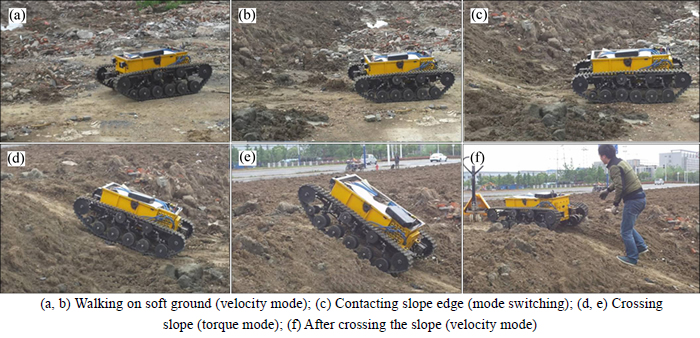
Fig. 8 Slope test process:
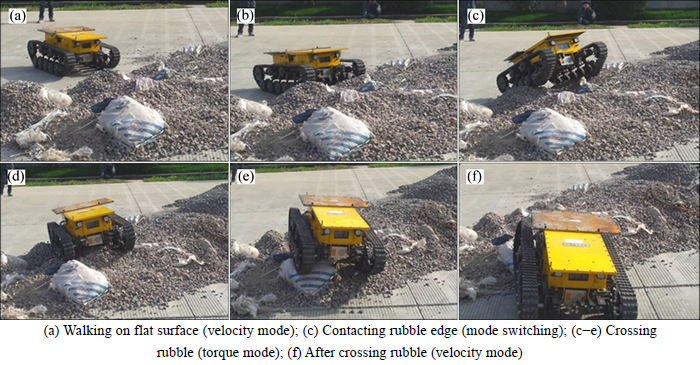
Fig. 9 Rubble test process:
The rubble terrain test process is shown in Fig. 9. This test was used to determine the effectiveness of the robot control program for complex signals. The rubble was relatively loose, while the robot, as discussed above, was fairly heavy. So, the robot was in danger of sinking into the rubble as it moved, repeating climbing and subsidence movements as it moved across the pile of rubble, which was expected to cause significant changes in current. During the tests, however, we found that apart from the initial change from velocity mode to torque mode, there was no change until the robot completely crossed the rubble. We attributed this phenomenon to the fact that although current changed considerably throughout the process, the duration spent in each mode was too short for the stability condition to be reached. Once the robot had crossed the rubble and met the stability condition, it worked solely in velocity mode.
5 Conclusions
1) The proposed explosion-proof walking system for coal mine rescue robots includes effective mechanical structure and control strategy design.
2) The mechanical structure innovations reported here mainly lie in the dual-motor drive tracked unit, which was created specifically to meet explosion-proof, simple structure, and favorable dynamic performance requirements. The key technologies utilized were the dual drive technology with different transmission ratios and the flame-proof treatment of the drive motor.
3) Our control strategy innovation mainly lies in the autonomous switching between the velocity-driven mode and torque-driven mode, which was designed according to decision tree and neural network principles.
4) A test platform was built to debug the robot control program, then a robot prototype was tested on single-step, slope, and rubble terrains. The experimental results showed that the walking system and control program successfully met our design objectives.
References
[1] LI Yun-wang, GE Shi-rong, ZHU Hua, FANG Hai-feng, GAO Jin-ke. Mobile platform of rocker-type coal mine rescue robot [J]. Mining Science and Technology, 2010, 20(3): 466-471. (in Chinese)
[2] MORRIS A, FERGUSON D, OMOHUNDRO Z, BRADLEY D, SILVER D, BAKER C, THAYER S, WHITTAKER C, HITTAKER W. Recent developments in subterranean robotics [J]. Journal of Field Robots, 2006, 23(1): 35-57.
[3] MURPHY R R, KRAVITZ J, STOVER S L, SHOURESHI R. Mobile robots in mine rescue and recovery [J]. IEEE Robotics & Automation Magazine, 2009, 16(2): 91-103.
[4] MORRIS A, FERGUSON D, THAYER S. A campaign in autonomous mine mapping [C]// IEEE International Conference on Robotics & Automation Piscataway, NJ: IEEE, 2004, 2(2): 2004- 2009.
[5] WANG W, DONG W, SU Y, WU D, DU Z. Development of search-and-rescue robots for underground coal mine applications [J]. Journal of Field Robotics, 2014, 31(3): 386-407.
[6] LI Yun-wang, GE Shi-rong, ZHU Hua, LIU Jiang. Obstacle- surmounting mechanism and capability of four-track robot with two swing arms [J]. Robot, 2010(32): 157-165. (in Chinese)
[7] KROTKOV E P, SIMMONS R G, WHITTAKER W L. Ambler: Performance of a six-legged planetary rover [J]. Acta Astronaut, 1992, 35(1): 75-81.
[8] SANTOS P G,  J, ESTREMERA J,
J, ESTREMERA J,  E. SIL04: A true walking robot for the comparative study of walking machine techniques [J]. IEEE Robotics & Automation Magazine, 2003, 10(4): 23-32.
E. SIL04: A true walking robot for the comparative study of walking machine techniques [J]. IEEE Robotics & Automation Magazine, 2003, 10(4): 23-32.
[9] DING Liang-hong, WANG Run-xiao, FENG Hua-shan, LI Jun. Brief analysis of a BigDog quadruped robot [J]. China Mechanical Engineering, 2012, 23(5): 505-514. (in Chinese)
[10] MA J, CHENG J, DAMIN Z. Analysis of sojourner��s six-wheeled rocker suspension appended with driving moment [C]// International Conference on Information Engineering & Computer Science. Piscatway, NJ: IEEE, 2009: 1-4.
[11] BOISSIER L. IARES-L: A ground demonstrator of planetary rover technologies [J]. Robotics & Autonomous Systems, 1998, 23(1/2): 89-97.
[12] ZHANG Hong-hua, LIANG Jun, HUANG Xiang-yu, YUAN Li. Autonomous hazard avoidance control for Chang��E-3 soft landing [J]. Scientia Sinica Technologica, 2014(44): 559-568. (in Chinese)
[13] FAN Lu-qiao, YAO Xi-tan, QI Heng-nian, YANG Wu, JIANG Liang-zhong. Research progress and key techniques of explosive ordnance disposal robot [J]. Machine Tool & Hydraulics, 2008, 36(6): 139-143.
[14] MATTHIES L, XIONG Y, HOGG R, ZHU D, RANLIN A, KENNEDY B, HEBERT M, MACLACHLAN R, WON C, FROST T, SUKHATME G, MCHENRY LM, GOLDBERG S. A portable, autonomous, urban reconnaissance robot [J]. Robotics & Autonomous Systems, 2002, 40(2): 163-172.
[15] YOU Bo, LIU Su-ju, XU Jun, LI Dong-jie. Design of multifunction anti-terrorism robotic system based on police dog [C]// International Symposium on Multispectral Image Processing & Pattern Recognition. Bellingham: SPIE, 2007: 6790.
(Edited by YANG Hua)
Foundation item: Project(2012AA041504) supported by the National High-Tech Research and Development Program of China; Project(KYLX15_1418) supported by the 2015 Annual General University Graduate Research and Innovation Program of Jiangsu Province, China; Project supported by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD), China
Received date: 2015-11-26; Accepted date: 2016-03-17
Corresponding author: ZHU Hua, Professor, PhD; E-mail: zhuhua83591917@163.com

