A data-driven early micro-leakage detection and localization approach of hydraulic systems
��Դ�ڿ������ϴ�ѧѧ��(Ӣ�İ�)2021���5��
�������ߣ��̱�ƽ � ������ ����� �ߴ�̹ �ư��� ������ ���ʽ�
����ҳ�룺1390 - 1401
Key words��micro-leakage localization; normalization model; hydraulic system; Bayesian networks
Abstract: Leakage is one of the most important reasons for failure of hydraulic systems. The accurate positioning of leakage is of great significance to ensure the safe and reliable operation of hydraulic systems. For early stage of leakage, the pressure of the hydraulic circuit does not change obviously and therefore cannot be monitored by pressure sensors. Meanwhile, the pressure of the hydraulic circuit changes frequently due to the influence of load and state of the switch, which further reduces the accuracy of leakage localization. In the work, a novel Bayesian networks (BNs)-based data-driven early leakage localization approach for multi-valve systems is proposed. Wavelet transform is used for signal noise reduction and BNs-based leak localization model is used to identify the location of leakage. A normalization model is developed to improve the robustness of the leakage localization model. A hydraulic system with eight valves is used to demonstrate the application of the proposed early micro-leakage detection and localization approach.
Cite this article as: CAI Bao-ping, YANG Chao, LIU Yong-hong, KONG Xiang-di, GAO Chun-tan, TANG An-bang, LIU Zeng-kai, JI Ren-jie. A data-driven early micro-leakage detection and localization approach of hydraulic systems [J]. Journal of Central South University, 2021, 28(5): 1390-1401. DOI: https://doi.org/10.1007/s11771-021-4702-1.

J. Cent. South Univ. (2021) 28: 1390-1401
DOI: https://doi.org/10.1007/s11771-021-4702-1

CAI Bao-ping(�̱�ƽ)1, 2, YANG Chao(�)1, 2, LIU Yong-hong(������)1, 2, KONG Xiang-di(�����)1, 2,
GAO Chun-tan(�ߴ�̹)1, 2, TANG An-bang(�ư���)1, 2, LIU Zeng-kai(������)1, 2, JI Ren-jie(���ʽ�)1, 2
1. National Engineering Laboratory of Offshore Geophysical and Exploration Equipment,China University of Petroleum, Qingdao 266580, China;
2. College of Mechanical and Electronic Engineering, China University of Petroleum,Qingdao 266580, China
 Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2021
Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2021
Abstract: Leakage is one of the most important reasons for failure of hydraulic systems. The accurate positioning of leakage is of great significance to ensure the safe and reliable operation of hydraulic systems. For early stage of leakage, the pressure of the hydraulic circuit does not change obviously and therefore cannot be monitored by pressure sensors. Meanwhile, the pressure of the hydraulic circuit changes frequently due to the influence of load and state of the switch, which further reduces the accuracy of leakage localization. In the work, a novel Bayesian networks (BNs)-based data-driven early leakage localization approach for multi-valve systems is proposed. Wavelet transform is used for signal noise reduction and BNs-based leak localization model is used to identify the location of leakage. A normalization model is developed to improve the robustness of the leakage localization model. A hydraulic system with eight valves is used to demonstrate the application of the proposed early micro-leakage detection and localization approach.
Key words: micro-leakage localization; normalization model; hydraulic system; Bayesian networks
Cite this article as: CAI Bao-ping, YANG Chao, LIU Yong-hong, KONG Xiang-di, GAO Chun-tan, TANG An-bang, LIU Zeng-kai, JI Ren-jie. A data-driven early micro-leakage detection and localization approach of hydraulic systems [J]. Journal of Central South University, 2021, 28(5): 1390-1401. DOI: https://doi.org/10.1007/s11771-021-4702-1.
1 Introduction
Hydraulic systems are widely used in the control systems of various equipment. Leakage is the most common failure of hydraulic control systems [1]. It can lead to catastrophic accidents without repaired in time. For example, a leakage of hydraulic control system can cause a failure of blowout preventers. It can cause great loss such as the oil spill in the Gulf of Mexico [2]. Leakage detection and localization is one of the paramount concerns for hydraulic control systems. The pressure of hydraulic circuits changes frequently because of the influence of load and state of switches, and results in a low accuracy of leakage localization. Meanwhile, the signals of sensors for early micro-leakage are generally pretty weak, and further reduce the localization accuracy.
Micro-leakage is the early stage of leakage. Generally, the pressure of hydraulic systems does not change significantly when micro-leakage occurs, so it is usually ignored [3]. However, the combination of vibration, fluid cutting, and temperature can cause the micro-leakage to a serious leakage, and then results in a failure of the hydraulic systems ultimately [4, 5]. The greater the pressure of a hydraulic system is, the faster it evolves from micro-leakage to failure, and the greater the damage is. It means that early detection and repair of micro-leakages can reduce losses and extend the service life of hydraulic systems. Therefore, leakage detection is closely concerned by the scientific research community.
Leakage detection and localization approaches of hydraulic equipment have been researched for years, and were mainly divided into model-based approach and data-driven approach. The model-based method is based on the basic characteristics of signal transmission. It is necessary to explore the relationship between the phenomenon and the signal source. In order to locate the source of the leakage, a monitoring model based on known relationships must be established. This method has an early origin and is widely used. For example, ZHANG et al [6] built a leakage localization model based on particle swarm optimization algorithm to locate pipeline leakages. XU et al [7] proposed a leakage localization model with a single acoustic emission sensor by integrating the empirical mode decomposition with wavelet transform to detect leakage in pipeline. HAN et al [8] exploited the Lagrange programming neural network, which provides a general framework to solve nonlinear constrained optimization problems, for the time-difference-of-arrival-based localization model, and verified its effectiveness through a simulation. DONG et al [9] proposed a detection approach using the auto-correlation function model of the normal concentration segment to detect industrial gas leaks. WANG et al [10] added the viscoelasticity of the tube wall to the governing equation of the transient wave through the extended Kelvin-Voigt model when located leakage in a viscoelastic pipe. Based on the dynamic model, WU et al [11] proposed a recursive ridge regression parameter estimation model to detect and isolate different leakage coefficients under varying loads to distinguish internal and external leakage of the hydraulic inlet guide vane. LIU et al [12] improved the time difference positioning model and put forward a new method based on the time and velocity differences to locate the leakage of gas pipeline. The main factor affecting the accuracy of such method is whether the model established is consistent with the actual system. And the relationship between signal sources and signals in complex systems is difficult to model. Therefore, the model-based method is mostly used for leakage localization of regular parts such as pipes, pressure vessels and bridges. This method is difficult to achieve high-precision positioning for hydraulic systems with complex shapes and multi valves.
The data-driven leakage localization approaches are based on the inference network. It is necessary to obtain training data by simulating experiments or collecting historical data. Data training is required to establish the leakage localization model. The approach has been developed rapidly in recent years. For example, LEE et al [13] developed training method based on the Newton�CRaphson method to improve directional robustness. MA et al [14] proposed a novel method based on neural network and graph theory which includes a generalized learning algorithm to detect the leakage of pipelines. HARMOUCHE et al [15] presented a new data-driven approach using association rules to extract information from large volumes of monitored acoustic data which can enable identification of relatively small changes in the acoustic signatures due to leaks. ZHOU et al [16] developed a novel data-driven leakage detection method based on densely connected convolutional neural networks to detect CO2 leakage. Based on the fully connected deep neural network, SOHAIB et al [17] used the data-driven method to detect the leakage in the boiler tube. CRUZ et al [18] proposed a technique that combines acoustic sensors and machine learning algorithms to identify and locate leakages in low-pressure gas pipelines. This method avoids the inherent relationship between the search phenomenon and the leak source. However, in order to achieve better accuracy in different states, experiments on different faults in different states are required. The structure of the hydraulic valve stack is complex, leakage is likely to occur at the connection between the valve and the base. Leakage is easy to set on the hydraulic valve stack, which makes it easy to obtain training data. Therefore, the data-driven method is suitable for leakage detection and localization of hydraulic systems.
As an early phenomenon of leakage, micro-leakage has been paid more and more attention. Few approaches of early micro-leakage detection and localization are proposed. For example, ZHOU et al [19] proposed a hybrid intelligent method that integrates kernel principal component analysis and cascade support vector data description for micro-leakage detection of pipeline. GUO et al [20] proposed an internal micro-leakage detection method for hydraulic cylinder. LANG et al [21] used the method based on the method of characteristics theory to detect the micro-leakage of the oil and gas pipeline. LIU et al [22] used both dynamic monitoring module and static testing module to increase the detection accuracy of micro-leakage. YANG et al [23] proposed a pipeline magnetic flux leakage image detection algorithm based on multiscale SSD network to solve the problem of low detection accuracy of small targets in the SSD detection algorithm. The existing early micro-leakage detection and localization approaches are mainly used for regular parts such as pipelines and pressure vessels. Few early micro-leakage detection and localization approaches of hydraulic systems are researched because of the complexity of the hydraulic systems.
Aiming to achieve a high localization accuracy for early micro-leakage of hydraulic systems with changing pressure, a novel Bayesian networks (BNs)-based data-driven detection and localization approach is proposed with acoustic emission sensors. The rest of the paper is organized as follows. Section 2 presents the proposed the BNs-based leakage localization approach. Section 3 uses a hydraulic system with eight valves to be an example to demonstrate the application of the proposed approach. Section 4 summarizes the contributions of this paper.
2 Micro-leakage detection and localization approach of hydraulic systems
2.1 Proposed micro-leakage detection and localization approach
The micro-leakage detection and localization approach of hydraulic systems is shown in Figure 1. Acoustic emission (AE) signal is collected and a wavelet transform is used to reduce the noise of the signal. Signal characteristic values are calculated using MATLAB. The signals under different pressures are selected to establish a normalization model. A BNs-based leakage detection and localization model is established which takes the valves as the parent nodes and the characteristic values as the child nodes. The model is trained using the data collected under leaks in different locations. A normalization model is used to convert the characteristic values of AE signals under different pressures to the characteristic values under target pressures. The localization results are obtained by inputting the processed data into the leak localization model.
2.2 Signal noise reduction
Different frequency components in signal are decomposed into non-overlapping frequency bands by wavelet transform, which provides an effective way for signal filtering, signal-to-noise separation and feature extraction [24, 25]. This method shows a unique advantage in signal noise reduction. The principle of wavelet threshold noise reduction is as follows:
 (1)
(1)
where s(n) is the useful signal and u(n) is the noise sequence. Assuming that u(n) is a random sequence with zero mean and subject to Gaussian distribution, subject to N(0, ) distribution, the wavelet transform is obtained for the above formula:
) distribution, the wavelet transform is obtained for the above formula:
 (2)
(2)
Let u(n) be a zero mean, independently distributed stationary random signal, where u=(u(0), u(1), ��, u(N-1))T, then
 (3)
(3)
where E{��} represents the operation of averaging, Q is the covariance matrix of u and I is a unit matrix. The covariance matrix of the wavelet transforms can be obtained by the follows:
 (4)
(4)
where W is the wavelet transform matrix; x and s are the vectors corresponding to x(n) and s(n); the vectors X, S, U are the wavelet transforms of x(n), s(n), and u(n); P is the covariance matrix of U.
The energy is concentrated on a few sparse wavelets with large amplitude after orthogonal wavelet transform. The noise is distributed on all time axes at various scales with a small amplitude. This method suppresses noise interference. The acoustic emission signal of the hydraulic systems under the pressure of 3 MPa is shown in Figure 2. Compared with the original signal, the high frequency noise of the signal denoised by wavelet transform is significantly reduced. Changes in the signal��s periodic waveform can be clearly displayed.
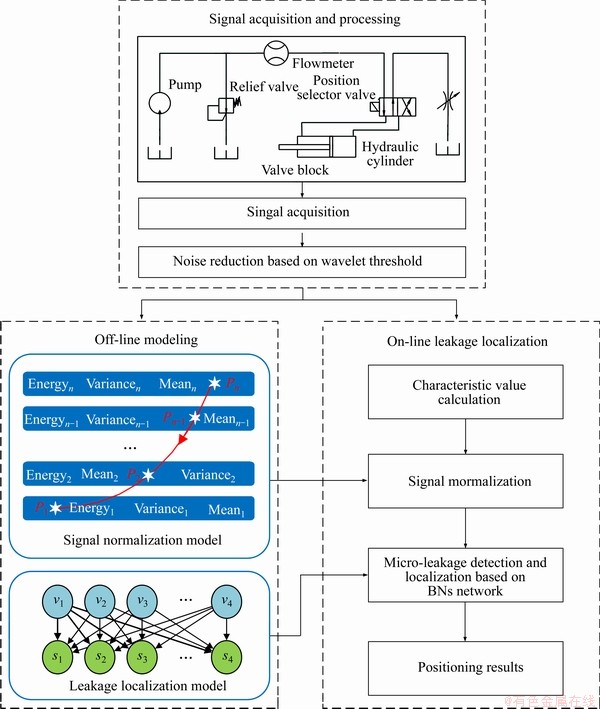
Figure 1 Micro-leakage detection and localization approach of hydraulic systems
2.3 Established normalization model
Robustness refers to the ability of the micro-leakage localization model to maintain good positioning accuracy under different pressures. The normalization model is mainly used to convert the characteristic values under different pressures to the characteristic values under target pressure, which can improve the robustness of the micro-leakage localization model. The establishment of the normalization model is based on an assumption that there is a functional relationship between the characteristic values and the pressure. First, the characteristic values in the non-leakage state under different pressures are obtained, and then, the relationship between the characteristic values and the pressures function is established to obtain the normalization model.
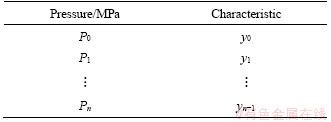
AE signals are collected when the hydraulic systems operate normally under different pressures, which is denoised using the method described in Section 2.2, and the characteristic values are obtained as given in Table 1.
The cubic spline curve has good performance in estimating the functional relationship between variables. For the data in Table 1, the functional relationship between pressure and characteristic values can be obtained. Among them, the coefficients M0, M1, ��, Mn-1, Mn are solved as:
 (5)
(5)
For the cubic spline curve, the core point lies in solving ��, �� and d to uniquely determine the coefficient matrix. The solutions of ��, �� and d are shown as:
 (6)
(6)
 (7)
(7)
 (8)
(8)
where h represents the difference between the two adjacent pressures, and its calculation method is shown in Eq. (9). The smaller the difference between the two adjacent pressures, the more the sampling points required for the same pressure range, and the more accurate the function relationship will be. However, if the difference between two adjacent pressures is too small, the order of the model will be too high, which will increase the calculation burden. In addition, the hydraulic systems respond slowly, if the difference between two adjacent pressures is too small, it is easy for the signal characteristic values to change insignificantly, which results in an inaccurate normalized model. After engineering verification, it is more appropriate to select 0.5 MPa pressure difference. f [Pi-1, Pi, Pi+1] represents the norm of the matrix [Pi-1, Pi, Pi+1], and it is solved as:
 (9)
(9)
 (10)
(10)
 (11)
(11)
Through Eqs. (6)-(8), only the values of ��, �� and d at i>0 can be calculated. When i=0, the values of ��, �� and d must be obtained. Each hydraulic system works normally in a specific pressure range. When the pressure is lower than a certain value, the hydraulic circuit cannot work normally, and the AE signal is too small to be collected. Therefore, it is assumed that the characteristic values no longer change when the pressure is lower than the normal working pressure range. When the pressure exceeds the normal range, the valves of the hydraulic circuit pipeline will be seriously damaged. At this time, the AE signal is mostly the noise signal after the circuit is destroyed. The useful signal is so small compared to the noise signal that it can be ignored. Therefore, it is assumed that the characteristic value is 0 and does not change when the pressure exceeds the normal working pressure range. It can be seen from the description above that the characteristic values of the AE signals at the two ends are the same. Besides the first and second derivatives of the characteristic values are also the same, which meets the third type of boundary conditions. When i=0, the calculation methods of ��0, ��0 and d0 are given as:
 (12)
(12)
 (13)
(13)
 (14)
(14)
According to the third type of boundary conditions, the M0 solution method is shown as:
 (15)
(15)
After obtaining M0, M1, ��, Mn-2, Mn-1, the relationship between the characteristic values and the pressure can be approximated. The relationship is shown as:
 ,
,
 (16)
(16)
where P represents the corresponding pressure, and yi(P) represents the characteristic value when the pressure is at P. In order to ensure the smoothness of the approximate function curve, the measured pressure is divided into small segments with each adjacent pressure value as a unit. Each segment meets the cubic function relationship, and the overall curve is smooth and continuous at each pressure value. The solution method of the residual coefficient Ai and Bi in the formula is shown as:
 (17)
(17)
 (18)
(18)
The characteristic values under different pressures are calculated by Eq. (16). In order to achieve accurate diagnosis, the measured values under different pressures need to be converted to the measured values under target pressures by:
 (19)
(19)
where yr represents the actual characteristic value under pressure P; yi(P) represents the characteristic value obtained through Eq. (18); ym represents the characteristic value without leakage under the target pressure; and y represents the corresponding characteristic value after normalization.
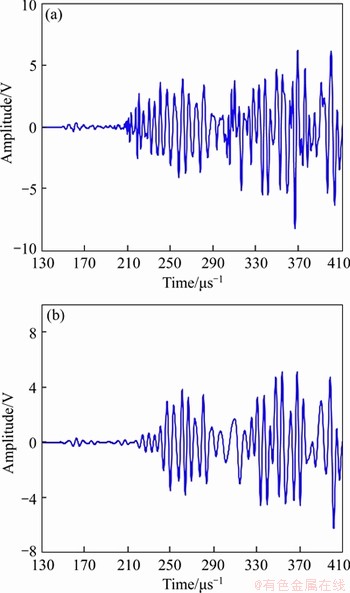
Figure 2 Signal comparison before (a) and after (b) wavelet noise reduction
Table 1 Characteristic values at different pressures
2.4 BNs-based micro-leakage detection and localization model
BNs are used to direct acyclic graphs, which output the probability of a certain event in the form of probability [24, 25]. Due to the uncertainty of the micro-leakage localization, the output results are more reasonable in the form of probability. The probability level can also reflect the current health level of the valves. BNs-based localization modelling of hydraulic systems generally includes two steps, that is, structural modeling and parameter modeling.
2.4.1 Structural modeling
The micro-leakage detection and localization model is shown in Figure 3. The leakage of the valve causes the changes of characteristic values; therefore the valves are set as the parent node in the model and contain two states: leakage (L) and normal (N). The change of characteristic values is a phenomenon caused by leakage, so it is set as the child nodes. As shown in Figure 3, Cij represents the j-th characteristic value of the i-th sensor, and its state needs to be adjusted according to the actual measured value. Each characteristic value node contains 3-8 states. Common signal eigenvalues include variance, energy, and peak value.
2.4.2 Parameter modeling
After the structural model is determined, the a priori probability of each node and the conditional probability between nodes need to be determined [26]. Assuming that M=(S, ��) is the proposed BNs with known structure S and unknown parameters ��, D is a complete dataset of cases, and each d��D is complete case, the probability P(d|M) is called the likelihood of M given d. Assume that the case in D is independent given the model, and then the likelihood of M given D is
 (20)
(20)
It is more convenient to work with the logarithm of the likelihood function, called the log-likelihood, defined as [27]:
 (21)
(21)
The goal of parameter learning is to estimate each conditional probability density function corresponding to every node that maximizes the likelihood function. The likelihood function is equal or greater than 0, while the log-likelihood function is equal or less than 0. However, maximizing the likelihood function is equivalent to maximizing the log-likelihood function. Thus, the optimal BNs model parameters are estimated from the sequence of training data by maximizing the log-likelihood-based objective function as [28]:
 (22)
(22)
The main failure form of hydraulic systems is leakage of valve. The hydraulic systems work under different pressures; therefore, to obtain a complete probability table of the leakage location model, setting the micro-leakage under different pressures and collecting signals for parameter learning are required. However, the normalization model described in section 2.3 greatly simplifies this step. The characteristic values under different pressures can be converted to the characteristic values under target pressures using a normalized model, which means that the positioning model only needs to have a good accuracy under a single pressure. Therefore, all the training data are generated from experiments.
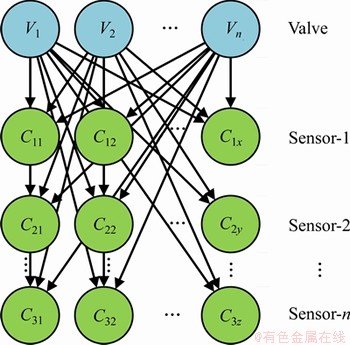
Figure 3 BNs-based leakage localization model
It is noted that the proportion of different fault nodes affects the prior probabilities of root nodes. However, the prior probabilities themselves cannot affect the performance of the micro-leakage localization. Therefore, a reasonable proportion of N and L, such as 4:1 can be set for training data.
2.4.3 Rules for micro-leak localization
After the structural modeling and parameter modeling are completed, the valve leakage probability needs to be calculated through the model. In the model shown in Figure 3, for node V with child node C, ��_c (V) is defined as the probability transfer from C to V, and this value is obtained by parameter modeling. Given the known sensor information E and the state of the child node Ci, the state probability of F in different states is
 (23)
(23)
where ��E(X) is an indicator of evidence, judged by monitoring data. When all states of the system are obtained, it should be equal to 1. The possibility of valve leakage is given by the micro-leakage detection and localization model in form of percentage. The greater the percentage is, the more likely the valves are to leak. Therefore, a minimum probability value needs to be specified, valve leakage is judged as leakage if this probability value is exceeded. According to a lot of engineering practice, when 65% is selected as the lowest probability of leakage, the model positioning accuracy is the highest.
3 Case study: A hydraulic system with eight valves
3.1 Hydraulic system description
The hydraulic system built in the laboratory is shown in Figure 4. Two stacks are separately supplied with pressure by two independent pumps, and each stack includes eight solenoid directional valves which receive hydraulic fluid from the same pump and the inlet pressures of them are the same.

Figure 4 A developed hydraulic system with eight valves
In order to ensure the normal operation of the circuit, a pressure maintaining valve and a throttle valve are installed at the end. The pressure range of the loop operation is 0-5 MPa.
Ruandao DS5-8B AE acquisition system is used to collect AE signal. The system includes four AE signal acquisition modules, which can acquire AE signals at a frequency of 5 MHz. The installation position and micro-leakage setup of the stack sensor are marked in Figure 5. The sensor group is installed at both ends of the valve stack to form a line positioning sensor group. The farther the valve from the sensor, the more severe the leakage signal attenuation. Therefore, two sensors are installed in the middle of the inside of the valve stack to ensure the positioning effect. The leakage positions of the valves mostly appear at the gasket connecting the valve and the base, so the micro-leakage is set by destroying the gasket between the valve and the valve block.
3.2 BNs-based leakage localization model
The leakage detection and localization model for the hydraulic system is established using the methodology described in Section 2.4. The model takes seven valves as the parent node and fourteen characteristic values of the four sensors as the child nodes, as given in Figure 6. The model is trained with different state data under 3 MPa. The normalized model is established using the normal state data at 1.5, 2, 2.5, 3, 3.5 and 4 MPa. In the model, F1, F2, ��, F7 represent seven valves that are prone to leakage in the system. Since the system contains two valve stacks that do not affect each other, and the main purpose of the experiment is to verify the performance of the method, only one valve stack is selected for modeling and simulation experiments. Since the leftmost valve of the system could not be removed, seven valves on the right side were selected as research objects. The meaning of child nodes in the model is shown in Table 2.
3.3 Results and discussion
3.3.1 Influence of normalization model
The characteristic values of sensor 1 are selected to be an example to introduce the effect of the normalization. AE signals are collected under normal conditions for each valve under the pressures of 1.5, 2, 2.5, 3, 3.5 and 4 MPa. The regression equation is established using the sensor 1 signal under normal conditions. The normalized curve is obtained by MATLAB programming. The measured value and normalized curve of the signal characteristic values are shown in Figure 7. When the pressure is low, the internal force of the device is small, and the main sound source comes from the operation of the motor which is a compact machine. Therefore, the signal is weak and the signal energy is weak. As the pressure rises, the equipment withstands huge internal forces and the fluid accelerates in the pipeline, causing greater friction. The AE signal is intense and the energy is huge. The measurement points basically fall on the normalized curve, indicating that the normalized model can accurately describe the relationship between the signal energy and the pressure change.
3.3.2 Positioning accuracy of approach under different pressures
The variation of leak location accuracy with pressure for different approaches is shown in Figures 8 and 9. PT1-7 represent the seven valves detected, and the accuracy represents the percentage of data with accurate diagnosis in the total number of data used for verification. The model has high accuracy near the pressure of the training sample. However, when the pressure changes, the accuracy drops sharply. When the pressure is lower than 3 MPa, the acoustic emission signal is weak; therefore, the acoustic emission signal does not change sharply with the change of pressure,which leads to a relatively small impact on the accuracy. When the pressure is greater than 3 MPa, the friction and collision between the liquid and the pipe are intensified, resulting in a great sound signal, which interferes with the accuracy of micro-leakage localization seriously. Since PT1, PT2 and PT7 are close to the sensor, the signal is collected by the sensor without attenuation of transmission path, therefore, when the pressure is 3.5 MPa, positioning accuracy for three valves is less than 80% and continues to decrease as the pressure increases. When the signal is normalized, the accuracy of the model in a wider pressure range is better and decreases slightly at the pressure at the edge. The normalization model was built using acoustic emission signals under different pressures, and useless signals under different pressures are calculated in the model, which ensures that the accuracy under different pressures can be approximate to the accuracy under 3 MPa. The positioning accuracies of PT1, PT2 and PT7 are significantly improved at 3.5 and 4 MPa. There is a functional relationship between the characteristic values of the AE signal and the system pressure. By the normalization model the usage dimension of the positioning model trained by the training data under a single pressure is extended and the robustness of the localization model is optimized.
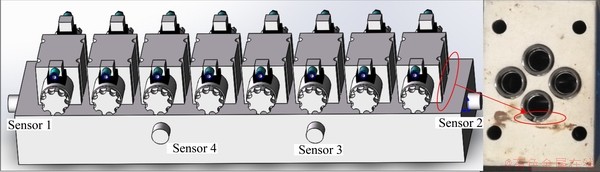
Figure 5 Sensor installation and micro-leakage setup
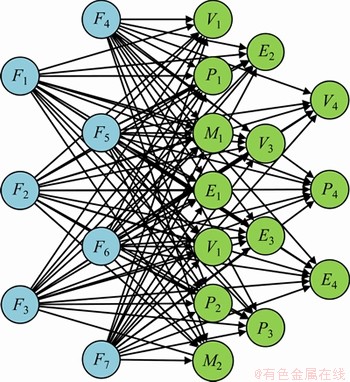
Figure 6 BNs-based leakage localization model
Table 2 Signal characteristic values and node of each sensor shown in Figure 6
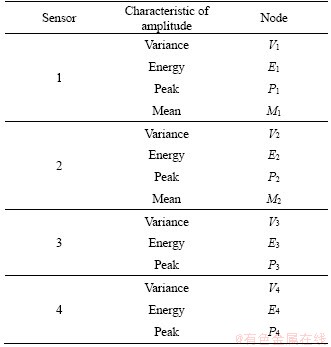
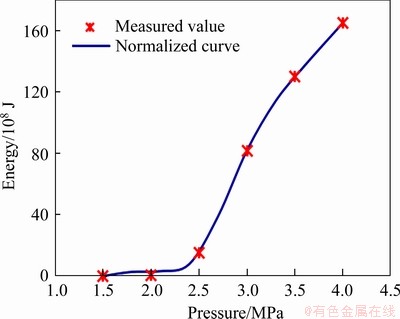
Figure 7 Measured value of characteristic values and normalized curve
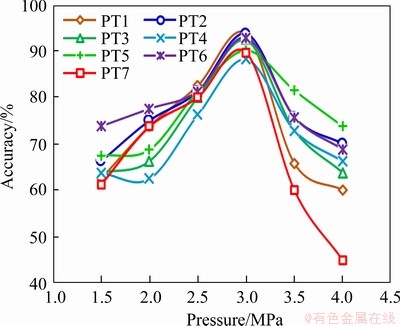
Figure 8 Accuracy of leakage localization without normalization model
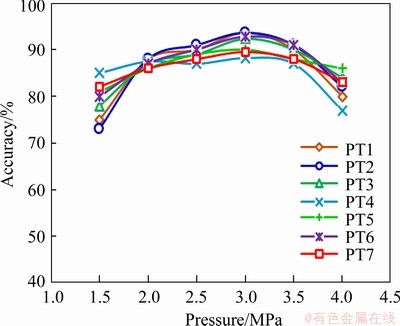
Figure 9 Accuracy of leakage localization with normalization model
3.3.3 Influence of amount of training data on accuracy
The data-driven method requires a large amount of simulation experiment data for model training, and the accuracy is greatly affected by the amount of training data. The less training data the model needs to achieve the desired accuracy, the less difficult the model is to apply to actual engineering. The change of accuracy with the amount of training data can measure the difficulty of model engineering application. The accuracy changes with the number of training samples is shown in Figure10. When the number of training data is around 100, the accuracy of each valve is less than 75%. The less training data limits the accuracy. As the amount of training data increases, the accuracy of the model increases rapidly. When the number of training samples reaches about 300, the location accuracy of each valve reaches 80%. When the number of training samples exceeds 450, the model accuracy increases to 90% and then increases slowly. The model can be used for engineering applications after training with 300 sets of data, the accuracy can reach 90% through self-learning.
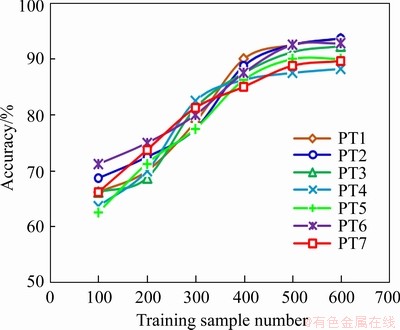
Figure 10 Accuracy of leakage localization varies with number of training samples
The approach proposed has been applied to a part of the hydraulic control system with two valves on Liuhua4-1 offshore drilling platform and the effect is particularly good, this application can the generality and scalability of the approach.
4 Conclusions
This paper proposes a data-driven early micro-leakage detection and localization approach of hydraulic systems using BNs. The proposed approach is demonstrated using a hydraulic system with eight valves. The results also indicate that the normalization model can effectively describe the relationship between the characteristic values of the AE signal and the pressure of the hydraulic systems. The accuracy of the localization model without normalization drops sharply as the pressure deviates from 3 MPa, and the accuracy is less than 80% at 1.5 and 4 MPa. The accuracy decreases slowly when the pressure is less than 3 MPa, and decreases sharply when the pressure is greater than 3 MPa. The positioning accuracy of PT1, PT2, PT7 is lower than 80% when the pressure is 3.5 MPa. However, the leakage localization model combined with the normalization model can maintain the accuracy of more than 85% in a wide pressure range. The accuracy of the leakage localization model combined with the normalization model achieves 80% when the number of training data reaches 300. Accuracy continues to increase as the amount of training data increases.
Contributors
The overarching research goals were developed by CAI Bao-ping, LIU Yong-hong and JI Ren-jie. YANG Chao, KONG Xiang-di and TANG An-bang researched the normalization algorithm and carried out experiments to verify it. GAO Chun-tan and LIU Zeng-kai analyzed the calculated results. The initial draft of the manuscript was written by CAI Bao-ping and YANG Chao. All the authors replied to reviewers�� comments and revised the final version.
Conflict of interest
CAI Bao-ping, YANG Chao, LIU Yong-hong, KONG Xiang-di, GAO Chun-tan, TANG An-bang, LIU Zeng-kai and JI Ren-jie declare that they have no conflict of interest.
References
[1] HU Jian-jun, CHEN Jin, QUAN Ling-xiao, KONG Xiang-dong. Flow measurement and parameter optimization of right-angled flow passage in hydraulic manifold block [J]. Journal of Central South University, 2019, 26(4): 852-864. DOI: 10.1007/s11771-019-4054-2.
[2] MARGHANY M. Automatic mexico gulf oil spill detection from radarsat-2 SAR satellite data using genetic algorithm [J]. Acta Geophysica, 2016, 64(5): 1916-1941. DOI: 10.1515/acgeo-2016-0047.
[3] SHANBHAG V V, MEYER T J, CASPERS L W, SCHLANBUSCH R. Condition monitoring of hydraulic cylinder seals using acoustic emissions [J]. The International Journal of Advanced Manufacturing Technology, 2020, 109(5, 6): 1727-1739. DOI: 10.1007/s00170-020-05738-4.
[4] WAN Wu-yi, ZHANG Bo-ran. The intermittent leakage phenomenon of incipient cracks under transient conditions in pipeline systems [J]. International Journal of Pressure Vessels and Piping, 2020, 186: 1-8. DOI: 10.1016/j.ijpvp.2020. 104138.
[5] ZHOU Zi-long, CHENG Rui-shan, CHEN Lian-jun, ZHOU Jing, CAI Xin. An improved joint method for onset picking of acoustic emission signals with noise [J]. Journal of Central South University, 2019, 26(10): 2878-2890. DOI: 10.1007/ s11771-019-4221-5.
[6] ZHANG Hao-ran, LIANG Yong-tu, ZHANG Wan, XU Ning, GUO Zhi-ling, WU Guang-ming. Improved PSO-based method for leak detection and localization in liquid pipelines [J]. IEEE Transactions on Industrial Informatics, 2018, 14(7): 3143-3154. DOI: 10.1109/TII.2018.2794987.
[7] XU Chang-hang, DU Sha-sha, GONG Piao, LI Zhen-xing, CHEN Guo-ming, SONG Gang-bing. An improved method for pipeline leakage localization with a single sensor based on modal acoustic emission and empirical mode decomposition with hilbert transform [J]. IEEE Sensors Journal, 2020, 20(10): 5480-5491. DOI: 10.1109/JSEN.2020.2971854.
[8] HAN Z F, LEUNG C S, SO H C, CONSTANTINIDES A G. Augmented lagrange programming neural network for localization using time-difference-of-arrival measurements [J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(8): 3879-3884. DOI: 10.1109/TNNLS. 2017.2731 325.
[9] DONG Lin-xi, QIAO Zhi-yuan, WANG Hao-nan, YANG Wei-huang, ZHAO Wen-sheng, XU Kui-wen, WANG Gao-feng, ZHAO Li-bo, YAN Hai-xia. The gas leak detection based on a wireless monitoring system [J]. IEEE Transactions on Industrial Informatics, 2019, 15(12): 6240-6251. DOI: 10.1109/TII.2019.2891521.
[10] WANG Xun, LIN Jing-rong, KERAMAT A, GHIDAOUI M S, MENICONI S, BRUNONE B. Matched-field processing for leak localization in a viscoelastic pipe: An experimental study [J]. Mechanical Systems and Signal Processing, 2018, 124: 459-478. DOI: 10.1016/j.ymssp.2019.02.004.
[11] WU Xin, LIU Yi-bing. Leakage detection for hydraulic IGV system in gas turbine compressor with recursive ridge regression estimation [J]. Journal of Mechanical Science and Technology, 2017, 31(10): 4551-4556. DOI: 10.1007/ s12206-017-0901-y.
[12] LIU Cui-wei, CUI Zhao-xue, FANG Li-ping, LI Yu-xing, XU Ming-hai. Leak localization approaches for gas pipelines using time and velocity differences of acoustic waves [J]. Engineering Failure Analysis, 2019, 103: 1-8. DOI: 10.1016/j.engfailanal.2019.04.053.
[13] LEE J, CHOI B, KIM E. Novel range-free localization based on multidimensional support vector regression trained in the primal space [J]. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(7): 1099-1113. DOI: 10.1109/TNNLS.2013.2250996.
[14] MA Da-zhong, WANG Jun-da, SUN Qiu-ye, HU Xu-guang. A novel broad learning system based leakage detection and universal localization method for pipeline networks [J]. IEEE Access, 2020, 7: 42343-42353. DOI: 10.1109/ACCESS. 2019.2908015.
[15] HARMOUCHE J, NARASIMHAN S. Long-term monitoring for leaks in water distribution networks using association rules mining [J]. IEEE Transactions on Industrial Informatics, 2020, 16(1): 258-266. DOI: 10.1109/TII.2019.2911064.
[16] ZHOU Zheng, LIN You-zuo, ZHANG Zhong-ping, WU Yue, WANG Zan, DILMORE D, GUTHRIE G. A datadriven CO2 leakage detection using seismic data and spatial�Ctemporal densely connected convolutional neural networks [J]. International Journal of Greenhouse Gas Control, 2019, 90: 1-15. DOI: 10.1016/j.ijggc.2019.102790.
[17] SOHAIB M, KIM J M. Data driven leakage detection and classification of a boiler tube [J]. Applied Science, 2019, 9(12): 2450-2462. DOI: 10.3390/app9122450.
[18] CRUZ R P, SILVA F V, FILETI A M. Machine learning and acoustic method applied to leak detection and location in low-pressure gas pipelines [J]. Clean Technol Environ Policy, 2020, 22(3): 627-638. DOI: 10.1007/s10098-019-01805-x.
[19] ZHOU Meng-fei, ZHANG Qiang, LIU Yun-wen, SUN Xiao-fang, CAI Yi-jun, PAN Hai-tian. An integration method using kernel principal component analysis and cascade support vector data description for pipeline leak detection with multiple operating modes [J]. Processes, 2019, 7(10): 648-665. DOI: 10.3390/pr7100648.
[20] GUO Yuan, ZENG Yin-chuan, FU Lian-dong, CHEN Xin-yuan. Modeling and experimental study for online measurement of hydraulic cylinder micro leakage based on convolutional neural network [J]. Sensors, 2019, 19(9): 2159-2178. DOI: 10.3390/s19092159.
[21] LANG Xian-ming, LI Ping, CAO Jiang-tao, LI Yan, REN Hong. A small leak localization method for oil pipelines based on information fusion [J]. IEEE Sensors Journal, 2018, 18(15): 6115-6122. DOI: 10.1109/JSEN.2018.2840700.
[22] LIU Cui-wei, LI Yu-xing, XU Ming-hai. An integrated detection and location model for leakages in liquid pipelines [J]. Journal of Petroleum Science and Engineering, 2019, 175: 852-867. DOI: 0.1016/j.petrol.2018.12.078.
[23] YANG Li-jian, WANG Zhu-jun, GAO Song-wei. Pipeline magnetic flux leakage image detection algorithm based on multiscale SSD network [J]. IEEE Transactions on Industrial Informatics, 2020, 16(1): 501-509. DOI: 10.1109/TII.2019. 2926283.
[24] LI Shun-ming, WANG Jin-rui, LI Xiang-lian. Theoretical analysis of adaptive harmonic window and its application in frequency extraction of vibration signal [J]. Journal of Central South University, 2018, 25(1): 241-250. DOI: 10.1007/ s11771-018-3733-8.
[25] ZHOU Zi-long, CHENG Rui-shan, CHEN Lian-jun, ZHOU Jing, CAI Xin. An improved joint method for onset picking of acoustic emission signals with noise [J]. Journal of Central South University, 2019, 26(10): 2878-2890. DOI: 10.1007/s11771-019-4221-5.
[26] CAI Bao-ping, LIU Yu, XIE Min. A dynamic-bayesian-network-based fault diagnosis methodology considering transient and intermittent faults [J]. IEEE Transactions on Automation Science and Engineering, 2017, 14(1): 276-285. DOI: 10.1109/TASE.2016.2574875.
[27] CAI Bao-ping, LIU Han-lin, XIE Min. A real-time fault diagnosis methodology of complex systems using object-oriented bayesian networks [J]. Mechanical Systems and Signal Processing, 2016, 80: 31-44. DOI: 10.1016/j.ymssp. 2016.04.019.
[28] CAI Bao-ping, ZHAO Yu-bin, LIU Han-lin, XIE Min. A data-driven fault diagnosis methodology in three- phase inverters for PMSM drive systems [J]. IEEE Transactions on Power Electronics, 2017, 32: 5590-5600. DOI: 10.1109/TPEL.2016. 2608842.
(Edited by FANG Jing-hua)
���ĵ���
����������Һѹϵͳ����Сй©����붨λ����
ժҪ��й©������ҺѹϵͳʧЧ����Ҫ��ԭ��й©�ľ�ȷ����붨λ�Ա���Һѹϵͳ���������о�����Ҫ���塣��й©�������ڣ�Һѹϵͳ��ѹ���ź�û�����Ա仯��ѹ�����������Զ�����м�⡣ͬʱ��ϵͳ��ѹ���ܵ����ؼ�����״̬�ı���仯���⽫���´������źű仯���Ҷ���һ���Ӿ�й©����붨λ�Ѷȡ����������һ������������Һѹϵͳ����Сй©����붨λ����������С���仯���źŽ��н��봦������������Bayesian�����й©����붨λģ�ͽ���й©��⣬ͨ����һ��ģ�ͽ���ͬѹ�����������ź�����ֵת��ΪĿ��ѹ�����������ź�����ֵ�������ѹ��³���ԡ��÷�����ʵ���ҵ�Һѹϵͳ�ϵõ�����֤��
�ؼ��ʣ�����Сй©��λ����һ��ģ�ͣ�Һѹϵͳ����Ҷ˹����
Foundation item: Project(51779267) supported by the National Natural Science Foundation of China; Project(2019YFE0105100) supported by the National Key Research and Development Program of China; Project(tsqn201909063) supported by the Taishan Scholars Project, China; Project(20CX02301A) supported by the Fundamental Research Funds for the Central Universities, China; Project(2019KJB016) supported by the Science and Technology Support Plan for Youth Innovation of Universities in Shandong Province, China
Received date: 2020-05-31; Accepted date: 2020-09-30
Corresponding author: CAI Bao-ping, PhD, Professor; Tel: +86-532-86983500-8616; E-mail: caibaoping@upc.edu.cn; ORID: https:// orcid.org/0000-0002-4499-492X

