Dynamic surface control-backstepping based impedance control for 5-DOF flexible joint robots
来源期刊:中南大学学报(英文版)2010年第4期
论文作者:熊根良 谢宗武 黄剑斌 刘宏 蒋再男 孙奎
文章页码:807 - 815
Key words:Cartesian impedance control; dynamic surface control; backstepping; PPSeCo; flexible joint robots
Abstract: A new impedance controller based on the dynamic surface control-backstepping technique to actualize the anticipant dynamic relationship between the motion of end-effector and the external torques was presented. Comparing with the traditional backstepping method that has “explosion of terms” problem, the new proposed control system is a combination of the dynamic surface control technique and the backstepping. The dynamic surface control (DSC) technique can resolve the “explosion of terms” problem that is caused by differential coefficient calculation in the model, and the problem can bring a complexity that will cause the backstepping method hardly to be applied to the practical application, especially to the multi-joint robot. Finally, the validity of the method was proved in the laboratory environment that was set up on the 5-DOF (degree of freedom) flexible joint robot. Tracking errors of DSC-backstepping impedance control that were 2.0 and 1.5 mm are better than those of backstepping impedance control which were 3.5 and 2.5 mm in directions X, Y in free space, respectively. And the anticipant Cartesian impedance behavior and compliant behavior were achieved successfully as depicted theoretically.
J. Cent. South Univ. Technol. (2010) 17: 807-815
DOI: 10.1007/s11771-010-0560-y![]()
XIONG Gen-liang(熊根良)1, XIE Zong-wu(谢宗武)1, HUANG Jian-bin(黄剑斌)1,
LIU Hong(刘宏)1, 2, JIANG Zai-nan(蒋再男)1, SUN Kui(孙奎)1
1. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China;
2. Institute of Robotics and Mechatronics, German Aerospace Center (DLR), Wessling 82230, Germany
? Central South University Press and Springer-Verlag Berlin Heidelberg 2010
Abstract: A new impedance controller based on the dynamic surface control-backstepping technique to actualize the anticipant dynamic relationship between the motion of end-effector and the external torques was presented. Comparing with the traditional backstepping method that has “explosion of terms” problem, the new proposed control system is a combination of the dynamic surface control technique and the backstepping. The dynamic surface control (DSC) technique can resolve the “explosion of terms” problem that is caused by differential coefficient calculation in the model, and the problem can bring a complexity that will cause the backstepping method hardly to be applied to the practical application, especially to the multi-joint robot. Finally, the validity of the method was proved in the laboratory environment that was set up on the 5-DOF (degree of freedom) flexible joint robot. Tracking errors of DSC-backstepping impedance control that were 2.0 and 1.5 mm are better than those of backstepping impedance control which were 3.5 and 2.5 mm in directions X, Y in free space, respectively. And the anticipant Cartesian impedance behavior and compliant behavior were achieved successfully as depicted theoretically.
Key words: Cartesian impedance control; dynamic surface control; backstepping; PPSeCo; flexible joint robots
1 Introduction
In contrast to traditional industrial robots, people in robotics domain transferred their interest into the service robot in the past several years, such as medical robots, mobile robots and exploration robots. These robots will work in the laboratory environments or practical environments, even in the space. The compliant behavior of the manipulator is predesigned whenever a robot is supposed to perform some manipulation tasks such as picking and placing operation in practice. In order to achieve the compliant behavior by a control method, an impedance control method, a classical issue, which could provide a unified framework for achieving compliant behavior when robot contacted with an unknown environment, was brought up.
Impedance control was theorized by HOGAN [1] and experimentally applied by KAZEROONI et al [2]. Based on a singular perturbation approach, flexible joint robot was controlled by impedance control [3], the feedback of the joint torques was therein considered as the control input of a fast inner control loop that received its set point values from an outer impedance controller. HUANG et al [4] also proposed an impedance controller for the flexible joint robot based on the singular perturbation theory by DSP (digital signal processing)/ FPGA (field programmable gate array) hardware structure. However, the main drawback of the singular perturbation method is lacking of theoretical justification for proving the stability due to the limitation of Tychonov’s theorem [5]. Therefore, ALIN and GERD [6] proposed Cartesian impedance control techniques for the torque control of light-weight flexible joint robots, using local stiffness control to enhance the impedance control. CHRISTIAN et al [7] developed decoupling based Cartesian impedance control of flexible joint robots and a formal analyzed the stability of the proposed controller. CHRISTIAN et al [8-10] investigated the Cartesian impedance control of the light-weight flexible joint robots of DLR with torque feedback, gravity compensation and complete static states feedback, and proved asymptotical stability based on passivity theory. OZAWA and KOBAYASHI [11] proposed a new impedance control concept for elastic joint robots with programmable passive impedance devices in the transmission. The concept allows the user to use the same index for free motion and contacting task, but it was applied to one-DOF elastic joint robots. GIANNI et al [12] presented an impedance controller for elastic joint industrial manipulators. Special attention was paid to all aspects that qualify an industrial robot, including decentralized proportional integral derivative position control, torsional flexibility, and friction at the joints, etc. CHIEN and HUANG [13] proposed a regressor-free adaptive impedance controller for an n-link flexible joint robot, the function approximation technique (FAT) was employed to transform the time-varying uncertainties into finite combinations of orthogonal basis functions. HUANG et al [14] proposed an adaptive impedance controller for flexible joint robot based on the friction model. The friction model includes viscous friction, payload and motor position based friction. The closed loop stability was investigated. LIU et al [15] investigated the Cartesian impedance control and nonlinear compensation for a harmonic drive robot based on joint torque sensors, and the imperfect Cubic model for harmonic drive friction was detected according to friction identification experiments. A Cartesian impedance control law was introduced by virtual decomposition [16] to realize the compliance control which incorporated with three means to make the flexible manipulator come into compliant contact with the objects.
Compared with the above singular perturbations, passivity theories and decoupling methods, the backstepping technique was barely applied to the flexible joint robot control except the bcakstepping method on Cartesian impedance control of flexible joint manipulators [17] even though it represented a complete solution of impedance control problem for flexible joint robot model including the tracking case and inertia shaping. On the contrary, the backstepping technique was widely used to design output or state feedback controller for flexible joint robots in the tracking case [18-26].
Because of these issues, a new impedance controller based on dynamic surface control-backstepping to actualize the anticipated dynamical relationship between the motion of end-effector and the external torques was presented. The dynamic surface control technique was able to resolve the “explosion of terms” problem in backstepping controller. The Lyapunov function guaranteed global stability of the proposed controller. Moreover, a DSP/FPGA-FPGA hardware structure was established to support the proposed impedance controller.
2 Dynamics of flexible joint robots
Generally, the reduced dynamic model of an n-link flexible joint robot refers to robot dynamics and actuator dynamics, which could be described as the following form proposed by SPONG [27]:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
where ![]() and
and ![]() denote the link and motor side positions, respectively;
denote the link and motor side positions, respectively; ![]()
![]() Rn and
Rn and ![]() denote the inertia matrix, centripetal and Coriolis vector, and gravity vector, respectively;
denote the inertia matrix, centripetal and Coriolis vector, and gravity vector, respectively; ![]() denotes the joint torque;
denotes the joint torque;![]() denotes the external torque that shown by the manipulator’s environment;
denotes the external torque that shown by the manipulator’s environment; ![]() denotes the motor torque served as the control input; the constant positive definite diagonal matrices
denotes the motor torque served as the control input; the constant positive definite diagonal matrices ![]() and
and ![]() represent the joint stiffness and the actuator inertia, respectively. Moreover, two well-known properties of the robot model utilized in the following sections are described as.
represent the joint stiffness and the actuator inertia, respectively. Moreover, two well-known properties of the robot model utilized in the following sections are described as.
Property 1: Link inertia matrix M(q) is symmetric and positive definite:
![]() >0,
>0, ![]() (4)
(4)
Property 2: Matrix ![]() is skew symmetric, if
is skew symmetric, if ![]() is chosen suitably using the Christoffel symbol, then:
is chosen suitably using the Christoffel symbol, then:
![]() (5)
(5)
These properties were proved by SCIAVICCO and SICILIAND [28].
3 Backstepping based Cartesian impedance control
The most important contribution of this work was to develop a design of impedance controller. Similar to the state transformation, Eqs.(1)-(3) could be rewritten in the Cartesian coordinates x=f(q) with the Jacobian J(q)=?f(q)/?q, Cartesian velocities ![]() accelerations
accelerations ![]() and torque variables τ and
and torque variables τ and ![]() as:
as:
![]() (6)
(6)
![]() (7)
(7)
where matrices ![]() and
and ![]() were given in Ref.[17].
were given in Ref.[17].
Considering that only the non-redundant and non-singular case was treated in this work, thus it is assumed that the manipulator’s Jacobian J(q) has full row rank in the considered region of the workspace.
External torques τext should be related to the vector of generalized external forces Fext via τext=J(q)Fext. In order to achieve the anticipant impedance behavior, position error ![]() was introduced, where x and xd represent real position and virtual equilibrium position, respectively. Then, the control object was to actualize a dynamic relationship of the form between
was introduced, where x and xd represent real position and virtual equilibrium position, respectively. Then, the control object was to actualize a dynamic relationship of the form between ![]() and Fext [17].
and Fext [17].
![]() (8)
(8)
where ![]() Dd and Kd are the symmetric and positive definite matrices of the desired inertia, damping and stiffness, respectively.
Dd and Kd are the symmetric and positive definite matrices of the desired inertia, damping and stiffness, respectively.
According to the classical impedance control law [1], the Cartesian impedance controller was then implemented via joint torque τ as follows:
![]() (9)
(9)
Step 1 In general, τ≠τd, by considering torque τ as the virtual input vector and defining error e1=τ-τd, assuming that error e1 is zero, a (non-strict) Lyapunov function is selected as
![]() (10)
(10)
where C1 is a symmetric and positive definite matrix.
The time derivative of ![]() can be given by
can be given by
![]()
![]()
where the skew-symmetric property (P2) is used, for the case of free motion (τext=0), if ![]() <0 then:
<0 then: ![]() where K1 is a positive definite controller gain matrix.
where K1 is a positive definite controller gain matrix.
Step 2 In general,![]() error term
error term ![]() is selected as the virtual input and the second error variable
is selected as the virtual input and the second error variable ![]() is introduced, assuming that the error e2 was zero, a Lyapunov function with a symmetric and positive definite matrix C2 is selected as
is introduced, assuming that the error e2 was zero, a Lyapunov function with a symmetric and positive definite matrix C2 is selected as
![]()
![]() (11)
(11)
The time derivative of ![]() is given by
is given by
![]()
Step 3 Controller design: through completing the backstepping step the controller could be chosen as:
![]() (12)
(12)
where K2 is a positive definite matrix, substituting (12) into ![]() leads to
leads to
![]()
![]() (13)
(13)
So, ![]() is negative semi-definite for the case of free motion, i.e., for τext=0. Hence, it can be concluded that the equilibrium is stable in the sense of Lyapunov. The same for the free motion, the closed loop system could be proved to be globally stable by considering
is negative semi-definite for the case of free motion, i.e., for τext=0. Hence, it can be concluded that the equilibrium is stable in the sense of Lyapunov. The same for the free motion, the closed loop system could be proved to be globally stable by considering ![]() for
for ![]() (the case of constrained motion (Fext≠0)). Using the replacement formulae
(the case of constrained motion (Fext≠0)). Using the replacement formulae ![]() and
and ![]()
![]() reordering the parameters and replacing expressions
reordering the parameters and replacing expressions ![]() and
and ![]() defining
defining ![]() and
and ![]()
![]() and substituting
and substituting ![]()
![]() into controller (12), controller (12) could be a more laconic form rewritten as:
into controller (12), controller (12) could be a more laconic form rewritten as:
![]()
![]()
![]() (14)
(14)
Controller (14) still has the “explosion of terms” problem caused by the estimation of the partial derivatives of α1 and α2 that were described in Ref.[29]. The explosion will become unpredictable as the order of the system increases. So, the dynamic surface control was introduced to resolve this problem in the following section.
4 Dynamic surface control-backstepping based Cartesian impedance control
4.1 Impedance controller design for flexible joint robot
In order to resolve the “explosion of terms” problem in backstepping controller, a combined method with backstepping and dynamic surface control technique was proposed to apply to the 5-DOF flexible joint manipulators by Cartesian impedance control.
The control object was to achieve a dynamical relationship between ![]() and Fext. A Cartesian impedance control system with backstepping was designed step by step using the DSC technique [30]. If the state space variables were defined as x1=x,
and Fext. A Cartesian impedance control system with backstepping was designed step by step using the DSC technique [30]. If the state space variables were defined as x1=x, ![]()
![]() and
and ![]() flexible joint systems (6) and (7) would be described as follows:
flexible joint systems (6) and (7) would be described as follows:
 (15)
(15)
First, define the multiple dynamic surfaces S1, S2, S3 and S4 as follows:
 (16)
(16)
where x1d denotes the desired trajectory; and x2d, x3d and x4d denote the stabilizing functions for the subsystem consisting of dynamic surfaces S2, S3 and S4, respectively. According to Eq.(15), the derivatives of Eq.(16) could be expressed as follows:
 (17)
(17)
To stabilize dynamic system (17), i.e. S1, S2, S3 and S4→0, the following control algorithms could be obtained:
 (18)
(18)
where α1, α2, α3 and α4 are positive design parameters. However, distinct from the approach of backstepping that was described in the previous section, x2d was obtained by ![]() through a first-order filter with time constant t2,
through a first-order filter with time constant t2,
![]() (19)
(19)
Similar to x2d, x3d and x4d could be obtained. So, actual control vector ![]() could be described as
could be described as
![]() (20)
(20)
Substituting expression x3=τ into Eq.(20) leads to
![]() (21)
(21)
Comparing controller (14) with controller (21), the proposed impedance controller (21) for flexible joint robots could resolve the “explosion of terms” problem of backstepping impedance controller (14) by evaluating the repeated derivatives of the virtual controllers. That is, the proposed DSC-backstepping control system for flexible joint robots used the outputs of first-order filters with ![]() and
and ![]() as the inputs, which were required in place of
as the inputs, which were required in place of ![]() and
and ![]() in the backstepping design procedure. Thus, the proposed controller design procedure based on DSC-backstepping technique could be very simple.
in the backstepping design procedure. Thus, the proposed controller design procedure based on DSC-backstepping technique could be very simple.
4.2 Stability analysis
In this section, the stability analysis of the proposed control approach on the 5-DOF flexible joint robots was given. First, choose the Lyapunov function as follows:
![]()
![]() (22)
(22)
where Si denotes the surface error; ei denotes the boundary layer error; ![]() denotes the observation error; and
denotes the observation error; and ![]() denotes the the estimation value of xi.
denotes the the estimation value of xi.
Lyapunov function (22) was differentiated with respect to time, and Si, ei, ![]() triangle inequality and property P2 were utilized. The derivative could be obtained as follows:
triangle inequality and property P2 were utilized. The derivative could be obtained as follows:
![]() ≤
≤![]()
![]()
![]() (23)
(23)
where l1, l2, l3, l4, k1 and k2 represent design parameters; Δ, βi and ci represent positive constants; and λ, V represent design function.
The derivative implied that ![]() ≤0 when V=p and λ>Δ/p. Therefore, V≤p was an invariant value, in other words, if V(0)≤p, then V(t)≤p for t≥0. And the surface error Si could be arbitrarily small to ensure stability of the controller.
≤0 when V=p and λ>Δ/p. Therefore, V≤p was an invariant value, in other words, if V(0)≤p, then V(t)≤p for t≥0. And the surface error Si could be arbitrarily small to ensure stability of the controller.
The proposed DSC-backstepping Cartesian impedance control scheme for flexible joint manipulators could be summarized by the DSC system. Accordingly, our control system could be designed more easily and simply than the Cartesian impedance control system via the backstepping technique.
5 Experiment analysis
5.1 Structure and physical parameters of 5-DOF flexible joint robots
In order to demonstrate the effectiveness of the proposed DSC-backstepping Cartesian impedance controller, firstly, the structure of 5-DOF flexible joint manipulators is shown in Fig.1 and the kinematic parameters and frame assignments are shown in Fig.2. The flexible joints of the robot are identical in the macro structure, which are driven by brushless DC and harmonic drive gear combined planet gear (gear ratio 1:12 000). A potentiometer and three hall sensors were equipped to measure the absolute angular position of the joint and the relative angular position of the motor. Eight strain gauges were fixed crossly to the output shaft of the harmonic drive gear to construct two full-bridges that measured the joint torques. The measurements of the angular position and the torque were fed to the Cartesian impedance controller. Moreover, the five joints were connected in series from the base toward the tip, joint i, connected link i with link i-1. Five frames, {Li}, i=1, 2, …, 5, were defined in a way that frame {Li} was fixed to link i with its Z-axis coincident with the ith joint axis, then the rotations by X-, Y-axes were constrained to the coordinate origin.
The robot parameters of kinematics and dynamics were very precisely computed using 3D mechanical CAD programs. Finally, K could be calculated by Eq.(3) in the joint impedance control when each joint contacted a rigid environment in which q was constant. The manipulator parameters are listed in Table 1. Where ai, αi, di and θi represent Denavit-Hartenberg (D-H) parameters; mi represents the joint quality; Bi represents the joint damp; and Ki represents the joint stiffness.
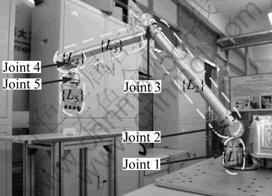
Fig.1 Five-DOF flexible joint robot
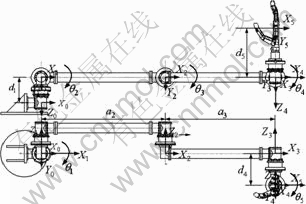
Fig.2 Kinematic parameters and frame assignments for 5-DOF flexible joints of robot
5.2 DSP/FPGA-FPGA based hardware system
The hardware system based on DSP/FPGA-FPGA as shown in Fig.3 was given to realize the proposed controller. In order to minimize cabling and weight of the 5-DOF flexible joint manipulator, a fully mechatronic design methodology was introduced to develop the hardware system. All the analog signals were converted into proper digital signals and serially transmitted into joint FPGA board and further to PCI (peripheral component interconnect)-based central processor. The hardware system consisted of PCI-based DSP/FPGA board configured as a Cartesian level and joint FPGA board for five-joint control configured as a joint level.
The control algorithm is illustrated in Fig.4. Joint’s FPGA board (Slave) took charge of the joint level controller, and a PCI-based DSP/FPGA board (Master) executed as Cartesian level. In the joint control level, the FPGA technology was chosen to achieve a more flexible implementation of the joint controller with a high control rate and a small sized joint electronics.
To implement real time control of the robot, the
Cartesian level needed the feedback information of positions, velocities and torques of the joints and calculated the required torques swiftly. At the same time, the joint level should update the input data in time especially for the transient state. Therefore, a high speed data bus of point-to-point serial communication (PPSeCo) was designed for this requirement, in which the cycle time is less than 200 μs and communication rate is up to 25 Mb/s. The communication and other control programs for FPGA were written in VHDL and run in FPGA.
Table 1 Manipulator parameters

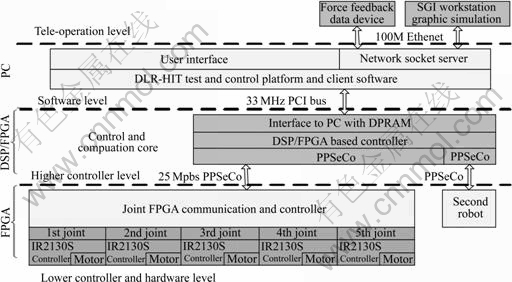
Fig.3 Hardware system based on DSP/FPGA-FPGA
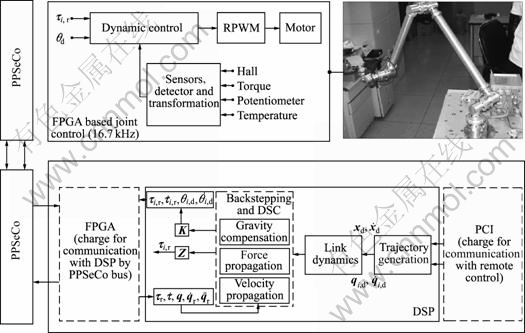
Fig.4 Block diagram of controller
5.3 Experiments
To illustrate the validity of the proposed methods, the following three experiments on manipulator were carried out.
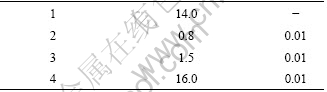
The first experiment was to use the 5-DOF flexible joint robot to track sine curve in X- and Y-directions, and remain static in Z-direction for the case of free motion (Fext=0) by backstepping impedance control and DSC-backstepping impedance control in Cartesian space. Fig.5 shows Cartesian coordinate positions and tracking errors in different directions under the methods of backstepping impedance control (BIC) and DSC- backstepping impedance control (DSC-BIC). From Figs.5(b) and (d), it can be seen that the tracking errors were 3.5 and 2.5 in X- and Y-directions by backstepping impedance control, while the tracking errors were 2.0 and 1.5 mm in X- and Y-directions by DSC-backstepping impedance control, respectively. The control parameters of two controllers are listed in Tables 2 and 3. According to Fig.5, the accuracy of the tracking errors was improved evidently by using DSC-backstepping impedance control.
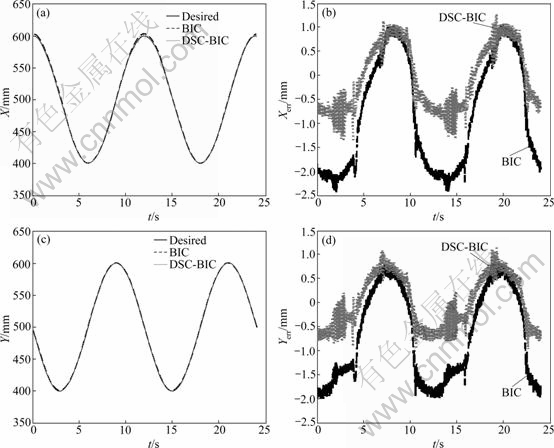
Fig.5 Cartesian coordinate positions and tracking errors in different directions: (a) Positions in X-direction; (b) Errors in X-direction; (c) Positions in Y-direction; (d) Errors in Y-direction
In addition, the trajectory tracking accuracy of impedance control was lower than that of position control because the impedance control sacrificed some tracking accuracy. Moreover, the more flexible the joint, the lower the accuracy of track, even not meeting the requirements. The tracking accuracy would be improved when the joint with little flexibility was regarded as a rigid joint, but the impedance performance would be down. Therefore, the above experiment compromised the impedance performance and the tracking accuracy. And that the phenomenon of the error was asymmetric about X-axis in Fig.5 was caused by the imperfect gravity and friction compensation.
Table 2 Parameters of backstepping impedance control
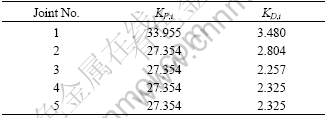
Table 3 Parameters of DSC-backstepping impedance control
The second experiment was Cartesian impedance experiment made on a 5-DOF flexible joint manipulator. Firstly, the robot was placed on a virtual equilibrium position CD=[0, 0, 0]. The anticipant stiffness (Ki) and damping (Di) in Table 4 were used. Then, the robot was pulled in different directions shown in Fig.6. Finally, the robot overcame the gravity and returned to the CD as soon as the force was released. Fig.6 shows the corresponding Cartesian forces along with the Cartesian position. It could be concluded that the theoretic Cartesian impedance behavior was achieved successfully.
In Cartesian impedance control, the desired Cartesian impedance stiffness could be set a small value (smaller than 20 N/m). Under this condition, the robot could be pushed freely using a small force, and when the force was removed, the robot could stay at the last position stably, which was called zero-force control.
Table 4 Impedance parameters in workspace
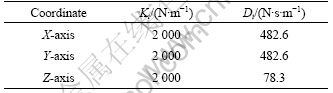
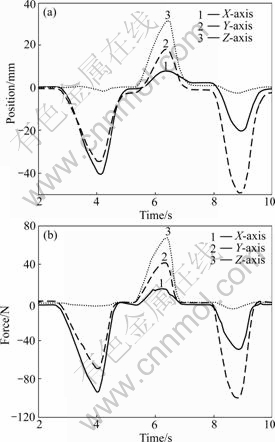
Fig.6 Variation of Cartesian coordinates in DSC-backstepping Cartesian impedance control: (a) Position; (b) Force
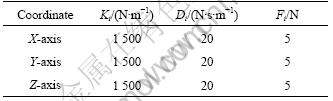
The third experiment, which was based on DSC- backstepping Cartesian impedance controller, was to test whether the end-effector could process a compliant behavior under a constrained space. The end-effector of the manipulator anticipant position was to make a circle motion with a cylindrical obstacle during the trajectory in Fig.7. During the motion, robot maintained a larger contact force in the tangent direction of the obstacle, while a smaller retention in the normal direction. Then, by the geometric calculation, the forces of the tangent direction and normal direction were converted to the contact force of directions X and Y on X-Y plane. According to Fig.7, it could be concluded that the DSC-backstepping based impedance controller realized the compliant behavior of flexible joint robot when it contacted with stiffness environment. The control parameters are listed in Table 5, where Fi represents the external force.
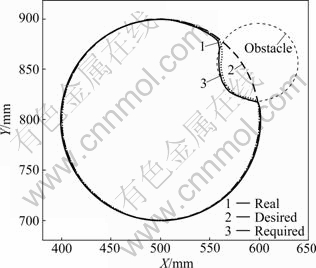
Fig.7 Circle tracking in X-Y plane constrained space by DSC-backstepping based impedance controller
Table 5 Impedance parameters in constrained space
Therefore, if expectation torques of the tangent direction and normal direction of end-effector were kept within an acceptable range, not only the robot itself and the object could be protected, but also the smooth surface obstacles could be avoided effectively.
6 Conclusions
(1) The DSP/FPGA-FPGA based special hardware system with PPSeCo is established. The hardware structure is designed not only to achieve the communication between joint level and Cartesian level, but also to calculate acceleration ![]() and the jerk
and the jerk ![]() which cannot be measured directly, and actualize the control algorithm.
which cannot be measured directly, and actualize the control algorithm.
(2) Two Cartesian impedance controllers based on backstepping and DSC-backstepping technique are proposed, the design of the latter is easier and simpler than that of the former because of the introduction of dynamic surface control technique which resolves the “explosion of terms” problem of backstepping-based impedance controller. And a formal stability of the DSC- backstepping impedance controller is proved based on Lyapunov function.
(3) Experimental results justify that the proposed DSC-backstepping impedance controller gives satisfactory tracking performance. And the impedance performance in free space and the compliant behavior in constrained space are achieved on the 5-DOF flexible joint robot.
References
[1] HOGAN N. Impedance control: An approach to manipulation: Theory (part Ⅰ); Implementation (part Ⅱ); Applications (part Ⅲ) [J]. Journal of Dynamics Systems, Measurement, and Control, 1985, 107(11): 1-24.
[2] KAZEROONI H, SHERIDN T B, HOUPT P K. Robust compliant motion for manipulators: The fundamental concepts of compliant motion (part Ⅰ); Design method (part Ⅱ) [J]. IEEE Journal of Robotics Automation, 1986, 2(2): 83-105.
[3] ALIIN A, CHRISTIAN O, UDO F, GERD H. Cartesian impedance control of redundant robots: Recent results with the DLR-light- weight-arms [C]// Proceedings of the 2003 IEEE International Conference on Robotics & Automation. Taipei: IEEE, 2003: 3704-3709.
[4] HUANG J B, XIE Z W, LIU H, SUN K, LIU Y C, JIANG Z N. DSP/FPGA-based controller architecture for flexible joint robot with enhanced impedance performance [J]. Journal of Intelligent and Robotic Systems, 2008, 53(3): 247-261.
[5] KHALIL H K. Nonlinear systems [M]. London: Prentice Hall, 2002: 93-95.
[6] ALIN A, GERD H. Cartesian impedance control techniques for torque controlled light-weight robots [C]// Proceedings of the 2002 IEEE International Conference on Robotics & Automation. Washington D C: IEEE, 2002: 657-663.
[7] CHRISTIAN O, ALIIN A, ANDREA K, GERD H. Decoupling based Cartesian impedance control of flexible joint robots [C]// Proceedings of the 2003 IEEE International Conference on Robotics & Automation. Taipei: IEEE, 2003: 3101-3107.
[8] CHRISTIAN O, ALIIN A, ANDREA K, GERD H. A passivity based Cartesian impedance controller for flexible joint robots: Part Ⅰ. Torque feedback, and gravity compensation [C]// Proceedings of the 2004 IEEE International Conference on Robotics & Automation. New Orleans: IEEE, 2004: 2659-2665.
[9] ALIIN A, CHRISTIAN O, GERD H. A passivity based Cartesian impedance controller for flexible joint robots: Part II. Full state feedback, impedance design and experiments [C]// Proceedings of the 2004 IEEE International Conference on Robotics & Automation. New Orleans: IEEE, 2004: 2666-2672.
[10] CHRISTIAN O, ALIIN A, ANDREA K, GERD H. On the passivity-based impedance control of flexible joint robots [J]. IEEE Transaction On Robotics, 2008, 24(2): 416-429.
[11] OZAWA R, KOBAYASHI H. A new impedance control concept for elastic joint robots [C]// Proceedings of the 2003 IEEE International Conference on Robotics & Automation. Taipei: IEEE, 2003: 3126-3131.
[12] GIANNI F, GIANANTONIO M, PAOLO R. Impedance control for elastic joints industrial manipulators [J]. IEEE Transactions on Robotics and Automation, 2004, 20(3): 488-498.
[13] CHIEN M C, HUANG A C. Regressor-free adaptive impedance control of flexible-joint robots using FAT [C]// Proceedings of the 2006 American Control Conference. Minneapolis: IEEE, 2006: 3904-3909.
[14] HUANG J B, XIE Z W, LIU H, SUN K. Adaptive Cartesian impedance control system for flexible joint robot by using DSP/FPGA architecture [J]. International Journal of Robotics and Automation, 2008, 23(4): 251-258.
[15] LIU H, LIU Y C, JIN M H, SUN K, HUANG J B. An experimental study on Cartesian impedance control for a joint torque-based manipulator [J]. Advanced Robotics, 2008, 22(4): 1155-1180.
[16] HUANG J B, XIE Z W, JIN M H, JING Z N, LIU H. Adaptive impedance-controlled manipulator based on collision detection [J]. Chinese Journal of Aeronautics, 2009, 22(1): 105-112.
[17] CHRISTIAN O. Cartesian impedance control of flexible joint manipulators [D]. Munchen: Universitat Des Saarlandes, 2005: 80- 82.
[18] HUANG A C, CHEN Y C. Adaptive sliding control for single-link flexible-joint robot with mismatched uncertainties [J]. IEEE Transactions on Control Systems Technology, 2004, 12(5): 770-775.
[19] MIN S K, JIN S L. Adaptive tracking control of flexible-joint manipulators without overparametrization [J]. Journal of Robotic Systems, 2004, 21(7): 369-379.
[20] YANG Y S, FENG G, REN J S. A combined backstepping and small-gain approach to robust adaptive fuzzy control for strict feedback nonlinear systems [J]. IEEE Transactions on Systems, Man, and Cybernetics, Part A: Systems and Humans, 2004, 34(3): 406-420.
[21] WITHI C, PETER H M. Robust observer backstepping neural network control of flexible joint manipulator [C]// Proceeding of the 2004 American Control Conference. Boston: IEEE, 2004: 5250- 5255.
[22] CHRIS J B M, ELEUTERIO G M T D, MENG M. CMAC adaptive control of flexible-joint robots using backstepping with tuning functions [C]// Proceedings of the 2004 IEEE International Conference on Robotics & Automation. New Orleans, IEEE, 2004: 2679-2686.
[23] WITHI C, PETER H M. Backstepping high-order differential neural network control of flexible-joint manipulator [C]// Proceedings of the 2005 American Control Conference. Portland: AACC, 2005: 1377- 1382.
[24] WITHI C, PETER H M. N Motion control of two link flexible joint robot, using backstepping, neural networks, and indirect method [C]// Proceedings of the 2005 IEEE Conference on Control Applications. Toronto, IEEE, 2005: 601-605.
[25] YOO S J, PARK J B, CHOI Y H. Adaptive dynamic surface control of flexible-joint robots using self-recurrent wavelet neural networks [J]. IEEE Transactions Systems, Man, and Cybernetics, Part B: Cybernetics, 2006, 36(6): 1342-1355.
[26] YOO S J, CHOI Y H, PARK J B. Dynamic surface controller for flexible joint robot without velocity measurements [C]// Proceedings of 2007 International Conference on Control, Automation and Systems. Seoul: IEEE, 2007: 1098-1102.
[27] SPONG M W. Modeling and control of elastic joint robots [J]. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(1): 310-319.
[28] SCIAVICCO L, SICILIANO B. Modeling and control of robot manipulators [M]. London: McGraw-Hill, 1996: 141-143.
[29] YIP P P, HEDRICK J K. Adaptive dynamic surface control: a simplified algorithm for adaptive backstepping control of nonlinear systems [J]. International Journal of Control, 1998, 71(5): 959-979.
[30] SWAROOP D, GERDES J C, YIP P P, HSDRICK J K. Dynamic surface control of nonlinear systems [C]// Proceedings of the American Control Conference. Albuquerque: IEEE, 1997: 3028- 3034.
Foundation item: Project(2006AA04Z228) supported by the National High-Tech Research and Development Program of China; Project(PCSIRT) supported by Program for Changjiang Scholars and Innovative Research Team in University
Received date: 2009-12-19; Accepted date: 2010-04-01
Corresponding author: XIONG Gen-liang, PhD; Tel: +86-451-86412042; E-mail: xgl.lijing@yahoo.com.cn
(Edited by LIU Hua-sen)

