
���ڼ�����Ӿ��������DZ�ʶ���ⷽ��
����Զ�������壬���ڣ�����
(�վ����̴�ѧ ���պ��칤��ѧԺ������ ������710038)
ժ Ҫ��
�DZ����䳣��ʶ���ⷽ���Ļ����ϣ����һ�ֻ��ڼ�����Ӿ��������DZ�ʶ����ķ��������������еļ����ؼ����ڼ����õ���ͼ�����㷨������̬ͬ�˲�������Ӧ��ֵ�˲����ϵķ���������ͼ��Ч����Ȼ���øĽ�����䷽�(Otsu)��ȡ�DZ��Ķ�ֵͼ�����øĽ���Ƥ���Ӿ�ģ�Ͷ��DZ��ı�Ե������ȡ������ϹǼ�����ȡָ�룬����ͨ������ݶ��½����õ�ָ���ȷ������ʵ�����������÷����ɿ��ٻ�ȡ�DZ�ָ����������ܲ��д�������DZ����봫ͳ��Hough�任����С���˷�����ȣ����㷨�ڱ�֤�����ȵĻ����ϣ��������˴�����������ʡ�
�ؼ��ʣ�
������Ӿ�����ֵ�˲�����䷽��������Ӿ�Ƥ��ģ��������ݶ��½�����
��ͼ����ţ�TH709��TP39.41 ���ױ�־�룺A ���±�ţ�1672-7207(2014)05-1469-07
Recognition and test method of cockpit meters based on computer vision
HE Linyuan, BI Duyan, XIONG Lei, ZHOU Li
(College of Aeronautics and Astronautics Engineering, Air force Engineering University, Xi��an, 710038, China)
Abstract: Based on the theory of cockpit meters and standard recognize technique, a new recognizing technique that is based on computer vision was proposed. Some key points and the image processing methods were discussed. The homomorphic filter and self-adaption median-value filter were used to perfect the result of image, and the improved Otsu was used to obtain binary image. The improved intersect cortical model (ICM) was used to receive edge of meters, and the pointer was picked up with combining skeleton. Finally, by the max gradient search method, the exact value was obtained. The result shows that this method can quickly get the number of meters, and process the parallel data. Compared with the traditional Hough transform and the least squares fit methods, this method can quicken the recognition process of the pointer and ensure the accuracy and standard of method.
Key words: computer vision; median-value filter; Otsu; ICM; max gradient search method
�������ѧ̽��������ʵ����У������DZ�����֪�������Ҫ���ߺ��ֶΡ�������һ����ת����ϵ��ͨ�����������ѱ�����ת��Ϊ������ʾ���߽�λ������ʵ�ֶ������DZ����нṹ��ʹ�÷��㡢�۸���������ԣ������á����õ����������Ӧ�ü���㷺������Ի����豸���ԣ����豸�ֳ����ԡ�ʹ�á������澯������ѹ�����������ʡ�����������Ƶ�ʵȲ����ļ�⣬��Ҫ���DZ�Ϊ������ˣ��DZ���ȷ�ԶԻ����豸�Ŀɿ���������������Ҫ������[1]��Ŀǰ��ͨ�õ��DZ�У�鷽�������ɹ�Ϊ2�࣬һ��ɳ�Ϊ����ͳ���������һ���Ϊ�������ж�����������ͳ���������Ҫ���˹�����Ϊ����ͨ�����������۲����ȷ�ȡ��������ж�������Ҫ��Ӧ�ü���������ֶΣ����DZ�����ʶ���ж����Ӷ������DZ�ָ��Ķ���[2-3]��ǰ�����������б�ݡ������ŵ㣬�������Ҫ������������ȷ�ȡ���ȷ������������Ӱ��ϴ����������˹��ж������⣬����˹���Ч�ʡ��������DZ�ָ��ǧ����𣬶Բ�ͬ���DZ�����ͬ�ּ������ó���Ч�����á���������Ҳ�����˶��ֲ�ͬ���㷨�������Ƕ�ͼ��ָ�Ͷ���ʶ����2����������Ŷ�������ͽ����������Ҫ�����м�Ӱ����Hough�任������С���˷�������ͶӰ���Լ���Щ����������Ӧ��[4-5]����Щ�������и��Ե��ص㣬������ڼ���ȸ��ӣ����Ȳ����Ҳ������ڲ�ͬ���ָ���DZ������⡣���磬����ͶӰ����������Ѱ����Բ���̵ļ���ʶ��Hough�任��������ʱ��ϳ��ȵȡ���ˣ�����������ƿ�����һ�־����������õ��DZ��Զ�ʶ��ͼ��ķ�����
1 Ӳ��ƽ̨���
����ʵ����Ҫ�;��飬��ϵͳ�������ǹ�˾������S3C2440��Ϊƽ̨������������CCD����ͷ���DZ�����ʵʱ������㣬��¼���ͼ��ͨ�������������Ĵ���ת��Ϊָ�����ʵ��������ϵͳ������ͼ1��ʾ��
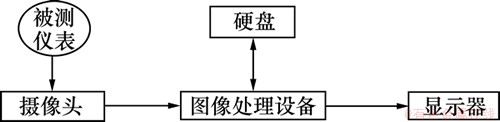
ͼ1 �DZ�ʶ����ϵͳ�ṹʾ��ͼ
Fig. 1 Schematic diagram for recognition and test of cockpit meters
1.1 ��Ҫ����
ʵ�ʲ���ʱ������ͷ��������DZ���������ͼ�����豸���������������Ԥ���������DZ�ͼ���йؼ�����зָ��ȡ��ͼ������������Ǽܣ����յó����ݣ������ݴ���Ӳ�̲�����ʾ������ʾ��ͼ����ƽ̨��Ҫ�Ի���Linux��OpenCVΪԴ�����⣬ �Ӷ�ʵ��ָ��̶ȵ�ʶ�𡣵�1��ʶ��ʱ���ɽ������������ݴ���Ӳ���У�����ģ�����ݿ⣬�Ա����ʶ��ÿ̶���ʱ�����ñ����������ݽ���ģ��ƥ�䡣����ʶ��õ��ĸ�ָ�����������һ�����ͨ�����LCDʵʱ��ʾʶ��������һ����Ҳ����ͨ�������ϴ����������ݿ⣬ʵ�������ָ���DZ���
1.2 ��������
�DZ��Զ�ʶ��ͼ��������ͼ2��ʾ���������£�
step 1�������DZ�ͼ��
step 2����ͼ����в�����
step 3������̬ͬ�˲�����ֵ�˲����ϵķ�����ͼ����н��봦����
step 4�����øĽ�����䷽�(Otsu)�����DZ�ͼ���ֵ������ö�ֵ��ͼ��
step 5����ͼ�����ϸ����ȷ����ָ�룬��ϸ���������ָ��ɵ����ؿ���ָ�룻
step 6�����øĽ��Ľ���Ƥ���Ӿ�ģ��(ICM)����ȡ�DZ���Ե��
step 7����������֪ʶ������ѧϰѵ����Ѱ���������������DZ����з���ȶԣ�
step 8�������ݶȷ�������ָ��ĽǶȣ�
step 9��ͨ���Ƕȣ����������֪ʶ��������ֵ�������д洢��ʾ��

ͼ2 �DZ��Զ�ʶ��ͼ������ͼ
Fig. 2 Flow chart for auto recognition and test of cockpit meters
2 ��������ʵʩ
�������Ի����DZ�Ϊ���������ڶ�ȡͼ����������̰��������������˲���ͼ���ֵ����ϸ������ȡ�DZ���Ե����ͼ��ϸ��(��ȡ�Ǽ�)���ж�ָ�����λ�úͼ���ָ��Ƕ���8���������̡�
2.1 ����
�豸�������DZ�Ӱ������������⾵�ڣ������豸�ڲ���ת���ɵ��ź�(ģ���ź�)������A/Dת����ת���������źţ����źŴ洢���ڴ��У�������������д���������Ϊ�˱������ڽǶȡ����յ�����������DZ�ָ��ƫ���ϱ�����Ӧ�õľ��廷����ѡ��ƽ�й�Դ������������ʽ�������ߴ��������䵽�DZ�������������ڹ�ķ��䷽���ϣ��������ο�˹�ز���������ǰ���£��Ը���Ƶ���н��еȼ�����������������ܹ����ͼ��㸴�Ӷȣ��������������������ʵ�֡�
2.2 �����˲�
�����DZ�������ͷת��Ϊ����ͼ��Ҫ������ѧ���䡢������ת�������ڣ���������������������Ӷ������DZ�����ʵ���Ⱥ�������ƫ�Ϊ�˽����������ţ�У�����շ�������Ļ��䣬���������ÿ���Ƶ�����ϵķ�ʽ(��̬ͬ�˲�����ֵ�˲�����)���DZ�ͼ����н��봦����̬ͬ�˲��������ն�-����ģ�Ϳ�����һ��Ƶ������ͨ�������Ҷȷ�Χ���Աȶ���ǿ����ͼ����н��롣��ֵ�˲���һ�־���ķ������˲�����[6-7]����ʵ�ʾ���������Χ���ػҶȲ�Ƚϴ�����ظ�ȡΪ����Χ���ؽӽ���ֵ���Ӷ��ﵽ�Թ����������ص��������Ԥ������Ч����ͼ3��ʾ������ʵ�ֲ������¡�
(1) ���ڹ��ձ仯��ָ����ɶ�ʵ��ָ�������Ӱ�죬ͨ��̬ͬ�˲��ķ���������ǿ�Աȶ����������յIJ������ã�
(2) ���ڴ���������������ͬ���������������룬ʹ�öԺ���ָ��Ͷ����Ŀ��ټ���������һ�������ѣ�Ϊ��������㣬��������������Ӧ��ֵ�˲�(ȫ��+�ֲ���ֵ����)�������������˳���

ͼ3 Ԥ������Ч��ͼ
Fig. 3 Effect drawing for preprocessing
2.3 ͼ���ֵ��
ͼ���ֵ���ǽ�ͼ���ϵĵ�ĻҶ���Ϊ0��255��ʹ����ͼ����ֳ����Եĺڰ�Ч������ʹ��Ҫ������ͼ���ü�������ϸ�ڲ���������������ͬʱ�Ը���Ȥ������ʶ������뱳�����÷����Ĺؼ�����ֵ��ѡȡ������ȡ��ֵ�ѻҶ�ͼ��ת��ɶ�ֵͼ����ֵ�����÷�Χ�����Է�Ϊȫ�ַ��;ֲ�����ȫ�ֶ�ֵ����ָ����ͼ��ֻ��1����ֵ�����ֲ���ֵ����ָ����ͼ���ж����ֵ����ֵ������С����ʹĿ��ͱ������벻�塣���лҶ�С�ڻ������ֵ�����ر���Ϊ��Ŀ�����壬������ֵ�����ر���Ϊ�DZ������ɼ�����ֵ��ѡȡ�������������ľ��ȡ�Ŀǰ��������Ҫ������䷽�(OSTU)[8]������ط�����С��[9]�ȷ�����ͼ����ж�ֵ�����������������������ʱ��ϳ������ڻҶȱ仯����ı�����Ŀ����ȡЧ�����Ǻ����롣Ϊ�ˣ����������øĽ���OSTU������ͼ����ж�ֵ������������������ͼ4��ʾ��
(1) ��ȡͼ������ͼ���С����ͼ���Զ��ָ�Ϊһϵ�пɱ��r��r����ͼ�����ͼ���������Ļ��֣�
(2) �������ڣ������DZ����ԣ������Ϊ2��(Ŀ�꼰����)��ͳ�Ƹ����ص�ĻҶȷֲ������Ҷȷ�Χ��Ϊ�ӽ��Ĺ�Ϊһ�࣬�����2�����������ѧ�����ͷ�����ݾ���OTSU���ҳ��ֲ���ֵT1(i)��
(3) �Ըô��ڽ��ж�ֵ�������������ѭ������B������ֱ������ͼ����ϣ�
(4) Ϊ����������Ե�ĵ�������У���ÿ��������Ϊ1�����ص㣬�ԻҶ�Ϊ��ֵT1(i)���������������������Э����ҳ�ȫ����ֵ�������е��������

ͼ4 ͼ���ֵ������ͼ
Fig. 4 Flow chart for image binarization
���㷨�����Զ����µķ���������ͼ��Ĵ�С����ͼ��ָ���Ӧ������ģ�壬����ͼ��Ϊ�ָ�Ķ������ǵ������Ե������ԣ�����Э������б�Ե��������ж���������㷨�ľ��Ⱥ��ȡ����ô˷������������ڱ�֤��ȡĿ��ͼ���ͬʱ�����������㷨�������ٶȣ���ýϺõĶ�ֵ������Ч������ͼ5��ʾ��
ͼ5 ��ֵ��Ч��ͼ
Fig. 5 Effect drawing for binarization
2.4 ϸ������
���ݲ���ԭ����֪���DZ�ָ���������ȡ�DZ�ʶ��ͼ�ⷽ����һ���൱��Ҫ�Ļ��ڣ�ͼ��ֵ����������ͼ���Ե�ֻ�б�������������������ͻ�����룬���Ϊ����ĺ��IJ��衣ϸ�������ɶ���ǼܵĹ��̡���ν�Ǽܣ���������Խ��ٵ���������ʾ�������״[10]����������DZ���Ҫ������ָ���ʾ�����ԣ��Ǽܵ���ȡ��������ָ�����ָ���λ�á�����ͳ��ȣ�����ϱ�Ե��������ȡ��Ϊ��һ���ж�ָ����ָ�Ķ�������Ҫ������ͳ��ȡ�Ǽܵķ���Ϊ����任������Ҫ����Ϊ��(1) ����ÿһ�����������������Ե����֮��ľ��룻(2) �������ͼ���������˹���ӣ����нϴ�ֵ�������������ᡣ�������ڴ�ͳ�����Ļ����ϣ������˵���ʽ��̬ѧ����������3��3ģ������ȡ�����DZ��ĹǼܡ�Stentifordϸ���㷨�е�ģ����ͼ6��ʾ�����巽��Ϊ��
(1) �ҵ�����(i, j)ʹͼ���е����غ�ģ��A�е�����ƥ�䣻
(2) ���������ز���һ���˵㣬������ͨ��Ϊ1�����ر��Ϊɾ����
(3) ������ƥ��ģ��A������������(1)��(2)��
(4) ���ζ�ģ��B��C��D�ظ�����(1)��(3)��
(5) �������ر����ɾ������������Ϊ��ɫ��ɾ����
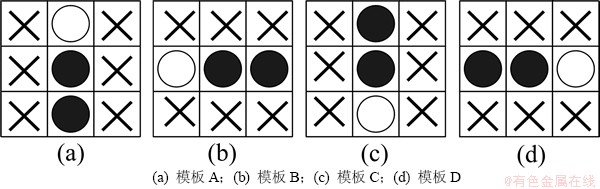
ͼ6 Stentifordϸ���㷨�е�ģ��
Fig. 6 Template for Stentiford algorithm
(6) �ظ�����(1)~(5)������ֹͣ��
��ɨ��ͼ���ģ�����ƥ��ʱ����һ����ɨ��˳��ƥ��ģ��A��Ŀ������Ŀ�������ϱ�Ե�ҵ������Ƴ������ص㣬�ʰ��մ������ҵ�˳�����ƥ�䣬���մ������µ�˳�����ƥ�䡣Bģ��ƥ��Ŀ���������أ������Ե����ϣ������ҵ�˳�����ɨ�衣Cģ��ƥ��Ŀ��ױ�Ե�����أ����մ��������Ե����ϵ�˳��ɨ�衣Dģ��ƥ���Ҳ����أ������Զ����£����������˳��ɨ�裬����һ��һ���������㣬�������������㷨����õĹǼ���ͼ7��ʾ��

ͼ7 ϸ��Ч��ͼ
Fig. 7 Effect drawing for thinning
2.5 ��ȡ��Ե
��Ե��Ŀ�����ͱ���֮��ı߽硣���ͼ���б�Ե����ȷ�ر�ʶ���������ô���еĶ�������Ա���λ�����Ҷ���Ļ�������(������ܳ�����״)�����Ա�������������������DZ������������DZ��ر���ָ���Ե����ȡ��Ϊ����ָ������Ĺؼ����衣һ����˵��������λĿ���Ե����3�ֳ������ӡ�(1) �������ӣ����ֳ���������ʶ������ǿ�ȱ仯�ĵط���(2) ģ��ƥ�䣬���б�Ե��һ����С��ͼ����н�ģ������Ϊ���������ı�Ե���ԣ�(3) ����һЩ����ı�Ե��ѧģ�ͣ����磺Marr-Hildreth��Canny Edge��Ե������ȡ�
��ͳ���ķ�����Ҫ������֪ʶ�٣�������Ӱ�����ձ仯��Ϊ���У��Ӷ�ʹ�㷨��ʵ�û����Եõ���֤����������Ϻ���ʵ����Ҫ�����ý����Ӿ�Ƥ��ģ��(intersecting cortical model)[11]�������DZ����зָ���ȡ���ڱ�֤�����ȵ�ͬʱ�������������е����ʡ�ICMԴ�����ǶԲ��鶯���Ӿ�Ƥ����Ԫ����ͬ����������о��ɹ�[12]����������ϵͳ�е���Ϣ�����ӳ��Ժͷ�������ϵ������ԣ����ӽӽ������Ӿ������磬�dz�������ͼ������������ͼ��ָ�����
ICM��Ԫ����ͻ�����������ӵ��ơ������������3�������[8]����ͻ���ֵ������ǽ�������������Ԫ��������Ϣ������������������ͨ���ͷ���ͨ��2������ɡ�������������ͨ���������Ծֲ�������Ԫͻ��������Ϣ������������ͨ�����˽������־ֲ�������Ϣ�⣬��ֱ�ӽ��������ⲿ�Ĵ̼���Ϣ���롣��Ԫ��ͨ��ͻ���������л������ɸ��ӵķ����Զ���ѧϵͳ������IJ���ȡ������ͻ�������Ƿ��伤����̬��ֵ��������ֵ����Ԫ���״̬�ı仯��Ӧ�ķ����仯��ͼ8��ʾΪICM��Ԫ�ܹ�ͼ��
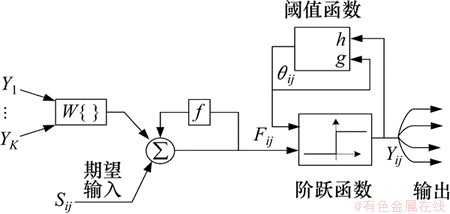
ͼ8 ICM��Ԫ�ܹ�ͼ
Fig. 8 Architecture diagram for ICM
ICM��ÿһ����Ԫ������һ��״̬Fij[n-1]���м��书����״̬Fij����ʱ��ı仯��������ݻᷢ��˥������˥���ٶ��ܵ�˥������f (f��1)��Ӱ�졣ICM����ѧ�������£�
 (1)
(1)
 (2)
(2)
 (3)
(3)
���У�SijΪ����ͼ���Ӧ���أ�i��jΪ�������ص�����ꣻWij{}Ϊ��Ԫ֮������Ӻ�����TijΪ��̬��ֵ��YijΪ��Ԫ�������f��g��h��Ϊ����ϵ����g��f��1����֤��̬��ֵ��������ջ������Ԫ��״ֵ̬��hΪһ�ܴ��������֤��Ԫ�����ܽϴ��������ֵ��ʹ��Ԫ���´ε�������������ICM��Ԫ���е������Ϊ ���ɼ���ICM��Ԫ������������뼤���йء�
���ɼ���ICM��Ԫ������������뼤���йء�
ICM����ͼ����ʱ����Ϊ�����ά�ֲ����ӵ����磬��Ԫ������ͼ�������ص�ĸ���һһ��Ӧ������ͼ���нϴ�����ֵ��Ӧ����Ԫ���ȵ��������壬����ֵͻ�����ϴ�ֵ����ʱ����ָ��˥����ֱ���ٴδﵽFij��Tijʱ����Ԫ��2�ε��ͬʱ�������Ԫͨ�����Ӻ���������������Ԫ�������ã�ʹ������������������Ԫ��̱�������ICMÿ�ε��������ͼ��ͬ�̶ȵذ���������ͼ�������Ե��Ϣ��
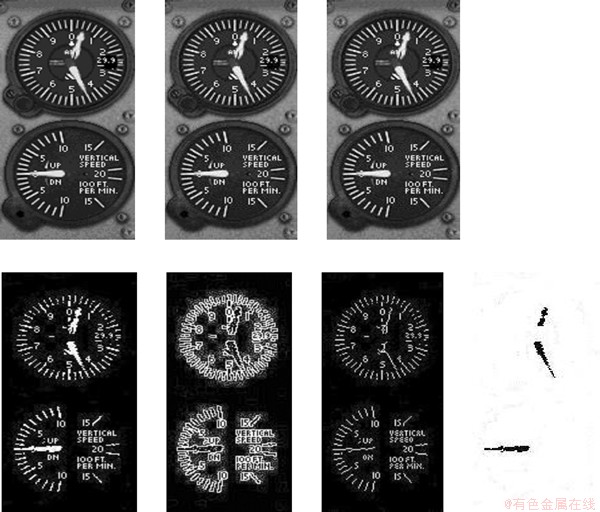
�ɼ��������Ӿ�Ƥ��ģ��(ICM)�߱���ɫ��ͼ��ָ���������ICMͼ��ָ�Ч������ȡ����ICM�������ĺ���ѡ��ȡ������ѷָ���ֵ��ѭ������������ȷ����ICM��Ԫ��ѭ������������Ҫͨ���˻�������ʽȷ�������ƻ���ICM����ѵ�����̵��ŵ��Լ�ICM�����ٶȿ����Խ�ԡ���ˣ�ѡ����ʵ������Զ���ȷ��ICM��Ԫ����ѷָ���ֵ�Լ�ѭ������������ICMͼ��ָ�Ĺؼ�������������ʵ����Ҫ�����ģ�����ϼ��صĸ�������Сģ���ȵ���ֵ����Ч�������DZ�ͼ����Զ��ָͼ9��ʾΪICM�ָ����DZ�ͼ��

ͼ9 �Ľ�ICM�ָ�ͼ
Fig. 9 Segmentation drawing for changing ICM
ICM�ָ�����¡�
����(1) �趨����f=0.8��g=0.8��h=1 000����ʼ��ֵ��=125����ͼ���ͳ�ģ�ͽ��е��
����(2) ��ɳ�ʼ�ָ��ȷ�������Ⱥ���������Ҷ�����Ϊ ��Ŀ��ĻҶ�����Ϊ
��Ŀ��ĻҶ�����Ϊ ��CΪ���ҶȺ���С�ҶȵIJ�ֵ����������X�ĻҶȺ���һ�����ص���ѧ����֮����ԽС����Ա����
��CΪ���ҶȺ���С�ҶȵIJ�ֵ����������X�ĻҶȺ���һ�����ص���ѧ����֮����ԽС����Ա���� ��Խ������ֵ
��Խ������ֵ ����Ա�����������£�
����Ա�����������£�
 (4)
(4)
����(3) ������ũ���� �������еĻҶ�
�������еĻҶ� ��ͣ�����N��M��ʾͼ���������������ZΪ�Ҷ�ֱ��ͼ������ģ�����ϵ���
��ͣ�����N��M��ʾͼ���������������ZΪ�Ҷ�ֱ��ͼ������ģ�����ϵ��� �������������趨�������������ֵ���ظ�����(1)��(2)����Ϊ��Сֵʱ��
�������������趨�������������ֵ���ظ�����(1)��(2)����Ϊ��Сֵʱ�� Ϊ��С��ģ���ȵ���ֵ��
Ϊ��С��ģ���ȵ���ֵ��
 (5)
(5)
 (6)
(6)
����(4) ���ﵽ��С����ֵ�ָ���ͼ����ж�ֵ���������Ա�����Ǽ�ͼ����ϣ��ҳ�ָ��λ�ã���ͼ10��ʾ��

ͼ10 ��ȡָ��ͼ
Fig. 10 Picture for picking up pointer
2.6 ģ��ƥ��
��������DZ��Ķ����ԣ�Ϊ�˿���ʶ��ͼ���������������������֪ʶ��ѧϰѵ�����ҳ�ij����Ļ�������(���̺���̶�λ��)����ɶԱ�������ľ��жϡ������������ж��DZ���ʶ�ķ��������DZ����й����[13]���ҳ��DZ�����ͨ������֪ʶ����֪�DZ������̡���̶Ⱥ����̶ȵľ���λ�ã�ͨ���ݶȷ���֪����С����������ϵĽǶ���Ϣ��Ϊ���ռ������Ƕȼ��������û�����
2.7 ����Ƕ�
��ȡָ��Ƕ�����������DZ��Զ�ʶ��ͼ��Ĺؼ����衣ͨ���Ե�ǰ�������㷨���о����֣������㷨�����Ų������ڲ������DZ�������ʱ���߳��ȱ�[14]����Դ����⣬����������sobel�ݶ�����������Ƕȣ��������ʾ��ͼ��ͼ11��ʾ������������ͼ��Ϊ��ֵ��ͼ�Ҷ�ֻ��0��255����Ϊ���������ȡָ��ĽǶ��ṩ�˱������������ȣ���ģ�忴��ijһ�������ϵ��ݶȣ������ض�Ӧģ�������λ�á��ر���ǣ��Խ����ϵ�Ԫ�ص�Ȩ�ر�ˮƽ����ʹ�ֱ�����Ԫ��Ȩ��С��X����ΪSx��Y����ΪSy������
Щ���������ݶȣ����� ���÷����൱����3��3�����е�ÿһ��2��2����Ӧ�����ӣ�Ȼ���������ƽ��ֵ����������Ϊ��
���÷����൱����3��3�����е�ÿһ��2��2����Ӧ�����ӣ�Ȼ���������ƽ��ֵ����������Ϊ��
(1) ���ָ�룬�ֱ���x��y�����ƫ������
(2) �õ���������ʾΪ���ش���ǿ�Ⱥͷ���
(3) ͨ������֪ʶ����֪��̶�������Ӧ��������
(4) ��ֵ���Ƕȡ�

ͼ11 �ݶ�����ʾ��ͼ
Fig.11 Map for gradient
3 ����������Խ��
���㷨�Ժ����DZ�Ϊ���Զ����ֲ��Խ����ͼ12��ʾ����1��ʾΪ�������ݡ��ӱ�1�ɼ���������ƫ���ֵ����������0.3%���ڣ����������ȸߡ����⣬ÿ��ͼ����������ʱ�����0.4 s���ڣ�����ʶ�����ʵʱ�������봫ͳHough�任����С���˷���������ͶӰ����ȣ����㷨����Ż����DZ��ļ�����Զ��ж����̣����������ж������ʡ�
ͼ12 ��Ŀ����ȡָ��
Fig. 12 Multi-target picking up pointer
��1 ��������
Table 1 Data for testing

4 ����
(1) ����Ŀǰ����ʶ���DZ������Ļ����ϣ����һ�����͵������DZ�ʶ��ͼ�ⷽ�������øĽ���Otsu������ͼ����ж�ֵ�����������õ���ʽ��̬ѧ������ȡ�DZ��Ǽܣ����ý����Ӿ�Ƥ��ģ����ȡ��Ե������sobel�ݶ�����������Ƕȵȡ�
(2) �DZ�ʶ������ص�������ȡ��Ե�Ǽܣ�ȷ��ָ���λ�á����øĽ��Ľ����Ӿ�Ƥ��ģ����ȡָ��ı�Ե���ڱ�֤�����ȵĻ�������������е����ʡ��ڼ���ָ�����ʱ�������ݶ�����½������������֪ʶ������Ƕȣ�����ʡ�������ʱ�䡣
(3) �������IJ��������ܹ��ﵽʶ����Ҫ��
�ο����ף�
[1] Ferrero A, Lazzaroni M, Salicone S. A calibration procedure for a digital instrument for electric power quality measurement[J]. IEEE Transactions on Instrumentation and Measurement, 2002, 51(4): 716-722.
[2] ��ӱ��. �����Ӿ��DZ�ʶ�����о���չ[J]. �Զ����DZ�, 2009, 30(8): 58-60.
HUANG Yingyi. Research progress of machine vision instrument recognition[J]. Process Automation Instrumentation, 2009, 30(8): 58-60.
[3] �ձ���, ������, ���. һ��ʵ�õ�ָ��ʽ�DZ�����ʶ��[J]. ��繤��, 2011, 38(4): 145-149.
TAO Bingjie, HAN Jiale, LI En. An applied method for reading recognition of index-instrument[J]. Opto-Electronic Engineering, 2011, 38(4): 145-149.
[4] Alegria F C, Serra A C. Automatic calibration of analog and digital measuring instruments using computer vision[J]. IEEE Transaction on Instrumentation and Measurement, 2000, 49(1): 94-99.
[5] Szeliski R. Computer vision: Algorithms and applications[M]. London: Springer, 2010: 10-50.
[6] ʱ����, ������. ����������������Ӧ��ֵ�˲��㷨[J]. ��������������, 2011, 32(9): 3115-3118.
SHI Junyan, LIU Shudan. Dynamic window-based adaptive median filter algorithm[J]. Computer Engineering and Design, 2011, 32(9): 3115-3118.
[7] ������, ���. �Ľ�������Ӧ��ֵ�˲�[J]. �����������Ӧ��, 2010, 46(3): 175-176.
WANG Xiaokai, LI Feng. Improved adaptive median filtering[J]. Computer Engineering and Applications, 2010, 46(3): 175-176.
[8] ������, �˵�¯, �ĵ���. ��άOtsu����Ӧ��ֵѡȡ�㷨�Ŀ���ʵ��[J]. �Զ���ѧ��, 2007, 33(9): 968-971.
WANG Haiyang, PAN Delu, XIA Deshen. A fast algorithm for two-dimensional Otsu adaptive threshold algorithm[J]. Acta Automatica Sinica, 2007, 33(9): 968-971.
[9] Rosenfeld A. From image analysis to computer vision: An annotated bibliography[J]. Computer Vision and Image Understanding, 2001, 84(2): 298-324.
[10] Gonzalez R C, Woods R E. Digital image processing[M]. NJ: Prentice Hall, 2003: 5-30.
[11] ����. ������������������ͼ�������������о�[D]. ����: �������ӿƼ���ѧ���ӹ���ѧԺ, 2011: 21-38.
LIU Qing. Research on several issues about image processing based on pulse coupled neural networks[D]. Xi��an: Xidian University. School of Mechano-Electronic Engineering, 2011: 21-38.
[12] Johnson J L, Padgett M L. PCNN models and applications[J]. IEEE Transaction on Neural Networks, 1999, 10(3): 480-498.
[13] Moghaddam R F, Cheriet M. A multi-scale framework for adaptive binarization of degraded document images[J]. Pattern Recognition, 2010, 43(6): 2186-2198.
[14] Palmer P L, Kittler J, Petrou M. Using focus of attention with the Hough transform for accurate line parameter estimation[J]. Pattern Recognition, 1994, 27(19): 1127-1133.
(�༭ �Կ�)
�ո����ڣ�2013-07-17�������ڣ�2013-10-12
������Ŀ��������Ȼ��ѧ����������Ŀ(61175029��61203268��61202339)
ͨ�����ߣ�����Զ(1983-)���У����������ˣ���ʿ�о�������ʦ�������źŴ�����ģʽʶ���о����绰��15291688114��E-mail: hal1983@163.com
ժҪ���ڼ�Ҫ���������DZ����䳣��ʶ���ⷽ���Ļ����ϣ����һ�ֻ��ڼ�����Ӿ��������DZ�ʶ����ķ��������������еļ����ؼ����ڼ����õ���ͼ�����㷨������̬ͬ�˲�������Ӧ��ֵ�˲����ϵķ���������ͼ��Ч����Ȼ���øĽ�����䷽�(Otsu)��ȡ�DZ��Ķ�ֵͼ�����øĽ���Ƥ���Ӿ�ģ�Ͷ��DZ��ı�Ե������ȡ������ϹǼ�����ȡָ�룬����ͨ������ݶ��½����õ�ָ���ȷ������ʵ�����������÷����ɿ��ٻ�ȡ�DZ�ָ����������ܲ��д�������DZ����봫ͳ��Hough�任����С���˷�����ȣ����㷨�ڱ�֤�����ȵĻ����ϣ��������˴�����������ʡ�
[2] ��ӱ��. �����Ӿ��DZ�ʶ�����о���չ[J]. �Զ����DZ�, 2009, 30(8): 58-60.
[3] �ձ���, ������, ���. һ��ʵ�õ�ָ��ʽ�DZ�����ʶ��[J]. ��繤��, 2011, 38(4): 145-149.
[5] Szeliski R. Computer vision: Algorithms and applications[M]. London: Springer, 2010: 10-50.
[6] ʱ����, ������. ����������������Ӧ��ֵ�˲��㷨[J]. ��������������, 2011, 32(9): 3115-3118.
[7] ������, ���. �Ľ�������Ӧ��ֵ�˲�[J]. �����������Ӧ��, 2010, 46(3): 175-176.
[8] ������, �˵�¯, �ĵ���. ��άOtsu����Ӧ��ֵѡȡ�㷨�Ŀ���ʵ��[J]. �Զ���ѧ��, 2007, 33(9): 968-971.
[10] Gonzalez R C, Woods R E. Digital image processing[M]. NJ: Prentice Hall, 2003: 5-30.
[11] ����. ������������������ͼ�������������о�[D]. ����: �������ӿƼ���ѧ���ӹ���ѧԺ, 2011: 21-38.
