
DOI: 10.11817/j.issn.1672-7207.2019.01.010
�������ಢ�������ĸ����ܻ�����������
�Ը�Ⱥ1����ʢ1��������2�����1
(1. ������ͨ��ѧ ��е����ӿ��ƹ���ѧԺ��������100044��
2. �������պ����ѧ ��е���̼��Զ���ѧԺ��������100191)
ժ Ҫ��
�ھֲ����ܼӹ�ʱ�ĵ�����̬�������˶����ܣ�ͨ���������������ķ�ʽ�����һ������2R (R)/S-2RS�ṹ���ಢ�����������Ի������н������Ժ�λ�������㣬����Լ���˳��������������ٶ�������������̼��ٶ�ӳ������ݽ������ԶԻ��������˶�������⣬�Ա������������ͬԼ���������������Ĺ����ռ䡣�����ſɱȾ��Ի������նȺ��������˶����ܽ��з�����ͬʱ���������������������������ܽ��жԱȡ��о����������ͨ���������������ķ�ʽʹ�������ܵõ���������Բ������Ϊ�˶��켣���Ի�������Բ���켣�˶����̽��з��棬������֤������ƵĿ������Լ���������ʵ�������������
(R)/S-2RS�ṹ���ಢ�����������Ի������н������Ժ�λ�������㣬����Լ���˳��������������ٶ�������������̼��ٶ�ӳ������ݽ������ԶԻ��������˶�������⣬�Ա������������ͬԼ���������������Ĺ����ռ䡣�����ſɱȾ��Ի������նȺ��������˶����ܽ��з�����ͬʱ���������������������������ܽ��жԱȡ��о����������ͨ���������������ķ�ʽʹ�������ܵõ���������Բ������Ϊ�˶��켣���Ի�������Բ���켣�˶����̽��з��棬������֤������ƵĿ������Լ���������ʵ�������������
�ؼ��ʣ�
�����������ṹ�������˶�ѧ�������������켣��
��ͼ����ţ�TH112 ���ױ�־�룺A ���±�ţ�1672-7207(2019)01-0067-08
Design and analysis of high performance machine tool based on redundant parallel mechanism
ZHAO Fuqun1, GUO Sheng1, XU Zichun2, LI Dian1
(1. School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China;
2. School of Aeronautic Science and Engineering, Beijing University of Aeronautics and Astronautics, Beijing 100191, China)
Abstract: To improve the performance such as adjusting orientation of parallel mechanism in local precision machining ability, a novel 2R(R)/S-2RS structural redundant parallel mechanism was proposed by adding redundant actuation method. The decoupling property and position solution were calculated for the mechanism. Based on the link constraint equation derivation method, the velocity input-output equation and velocity Jacobian matrix were obtained. The parasitic motion of the proposed mechanism was solved by decoupling property. The workspace comparison between the redundant mechanism and non-redundant mechanism under the same constraints was given. And the static stiffness and dexterity performance of the redundant mechanism were analyzed based on Jacobian matrix. The performance of the mechanism was compared with that of non-redundant mechanism. The results show that the performance of the mechanism is improved by adding redundant actuators. Taking circular curve as a trajectory, the simulation of the circular trajectory motion process of this mechanism is carried out. The simulation results verify the feasibility of this design and show the ability of the mechanism to realize implement motion.
Key words: parallel machine tool; structural redundancy; kinematics; performance evaluation; trajectory
���ں��պ��������㲿���ʹ������ṹ�ߴ�ϴ���Ӳ�Ƚϸߡ��ڼӹ������У�����Ҫ��ӹ��������и����ܵ�Ҫ���ӹ�ʱִ�л������߸ն�Ҫ��ĩ�˵�������Ҫǿ�����ں��������㲿�����ܼӹ��У�����������Ϊ����ִ�мӹ������ĩ�˻�����ͨ���ƶ���Ԫ����ӹ�λ�ã��ɲ����������㲿�����оֲ��ӹ����ڲ�������Ӧ���ھֲ��ӹ�ʱ�������ھֲ��ӹ��и߸ն����ܺ��ڼӹ�λ��ʱ��ƽ̨�ĵ��������Dz���������ƺ�Ӧ���迼�ǵ���Ҫ���⡣���������о���ͨ���������������뵽���������У��Ի������ܵ���߽����˷������о�[1-5]��GOSSELIN��[6-7]�Ⱥ�����˶�ƽ̨������ת��ƽ�����ಢ������������Gs����ת�ǵĿռ����ಢ���������˷��˲�������ת�������IJ��㡣XIE��[8]����˾������������Ļ�����������������ϳ���ӹ�ʵ���о�����֤���Ʋ�ϼ��[9]����������ͽṹ����2�ֻ��������ݴ����ܽ������о�����ʾ��������������ݴ����ơ���־����[10-11]ͨ��������������֧���ķ�ʽ���о���֤���˴�������Բ��������նȵ�������Ŀǰ�����ಢ�������ɷ�Ϊ��������ͽṹ����2��[12]���������������������ؽ��滻һЩ����ϵͳ�б����ؽڵķ���������ơ�����������������������˻���������λ�ͣ������ı�ԭ�в��������Ĺ����ռ䣬���������ӷ�ʽ�����˲�����Ӧ���Ŀ��ܡ��ṹ������ͨ�����������ṹ�����������Ԫ���˶���֧�������˶�֧���ϣ��ڻ��������ӽṹ������Ա����˶�ѧ�����ԣ��Ż������ռ䣬��߾ֲ������������Եȣ�ͬʱ���Ա������������²�����Ӧ����������ṹ����������������һЩ����Ҫ����˶�[13-15]�������������2R(R)/S-2RS������������3-RS��������Ϊ������壬ͨ���ڵ�֧������������������֧�Եõ��ṹ���ಢ�����������������˶�֧����Ԫ���ñջ���·���̴���ϵ�������ķ���������⡣ͬʱ�������ſ˱Ⱦ���ͨ���Ա���3-RS�����˶�ѧ���ܣ���ʾ���������Ի����˶�ѧ���ܵĸ���Ч�����Բ�������Ӧ���ڻ����ӹ��е�Բ���ι켣Ϊ�����Ի��������˶����棬���Ϊ����������һ��Ӧ���ڻ�������ƺ������ṩһ�ַ�����
1 �������������ɶȼ���
1.1 �����ṹ����
ͼ1��ʾΪ����2R(R)/S-2RS���ಢ��������ģ�ͼ�ͼ��P��ʾ�����ؽڣ������ʾ�����ؽڣ�(R)��ʾ����ת������֧��1~3�ֱ��붨ƽ̨����ת�������������붯ƽ̨������������֧��1��2�������˼�����ת������������֧����Բ�ܶԳƲ��á�ͼ1��Ai��B��D���ʾ��֧��ת���������ĵ㣬��֧�������ĵ���Si��ʾ���ֱ����̶�����ϵOxyz�Ͷ�����ϵPuvw��֧��1�и�ת����������x��ƽ�У�������ϵ���ĵ�ֱ��붨ƽ̨�Ͷ�ƽ̨���ĵ��غϡ�
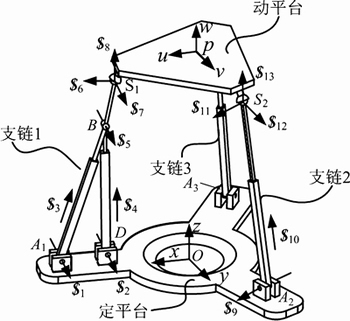
ͼ1 ����2R(R)/S-2RS��������ģ�ͼ�ͼ
Fig. 1 Schematic description of 2R(R)/S-2RS parallel mechanism
1.2 ���������붯ƽ̨���ɶȼ���
�������ʼλ��Ϊ��ƽ̨ƽ���ڶ�ƽ̨����ͼ1��ʾ������ϵ�£�֧��1�и�ת�������ĵ�����ɼ�Ϊ




֧��1��ת�������߷�����y�᷽��ƽ�У�����������[16-17]�ɵã���֧��1�и����˶����Ĺؽ��˶������ɱ�ʾΪ
 (1)
(1)
��֧��1���˶�����ϵ�ɼ�Ϊ
 (2)
(2)
������ɵ�֧��1ĩ��Լ��������
 (3)
(3)
ʽ�У� ��ʾ��y�᷽��֧��1�������ĵ��Լ������
��ʾ��y�᷽��֧��1�������ĵ��Լ������
ͬ���ɵ�֧��2��֧��3��Լ������Ϊ��
 (4)
(4)
 (5)
(5)
��ʽ(3)~(5)����֧���Զ�ƽ̨�ֱ��ṩ1��Լ������Լ�����ķ������Ӧ��֧����ת����������ƽ�У���ͨ����Ӧ��֧���������ĵ㡣���ڻ�����ʼλ��Ϊ��ƽ̨������ƽ�У���ˣ�������ʸΪ�����ϵ������3�����㽻�ҹ��������ʸΪ�����أ������������ۣ���ƽ̨��Լ�����˶�Ϊƽ����x��y����ƶ�����z�᷽���ת�����ɴ˿ɵã�������ƽ̨�����ɶ�Ϊ��x��y�����߷����ת����ƽ����z����ƶ���
���ں���֧���ṹ�IJ�����������ͨ������������G-K��ʽ����õ����������ɶȣ�
 (6)
(6)
���У�MΪ�����������ɶȸ�����dΪ����������d=6-�ˣ���Ϊ��������Լ��������nΪ����������֮�ͣ�gΪ�����˶�����֮�ͣ�fiΪ�˶���i���е����ɶȸ�����vΪ������ȥ����Լ����Ŀ�������Լ��������
֧��1�У��ֱ��$1��$3�Լ�$2��$4�������ɵõ�2��������ϵ�У�3�鷴������ͬ��֧��1��������Լ������ĿΪ3����ʽ(6)��v=3������ʽ(6)�ɵó���
 (7)
(7)
��ˣ�������������ɶȵ���4����ƽ̨�������ɶ���Ϊ3��������2R(R)/S-2RS����Ϊ�ṹ���ಢ��������
2 �����˶�ѧ
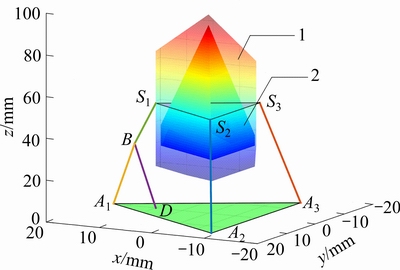
����2R(R)/S-2RS���������ṹ��ͼ��ͼ2��ʾ����ת����D�����ĵ㵽����ԭ��O����Ϊl����ת����A1�����ij���Ϊl5���ֱ���������A1B��BD��A2S2��A3S3��Ϊl1��l2��l4��l6����BS1��Ϊl3�����������붨ƽ̨�нǷֱ�Ϊqi (i=1,2,3)��������BD�붨ƽ̨�н�Ϊh����BS1��ˮƽ��нǣ���ƽ̨���㵽������ϵԭ�����Ϊr��
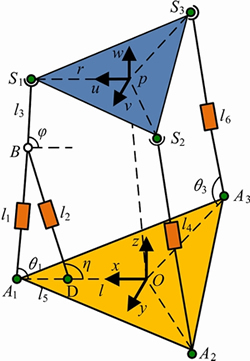
ͼ2 ����2R(R)/S-2RS���������ṹ��ͼ
Fig. 2 Schematic diagram of 2R(R)/S-2RS parallel mechanism
����Z-Y-X��ŷ���任�Զ�ƽ̨��̬���б���[13]������a�� ��g����ƽ̨����̬������������ʽ��Ϊ
��g����ƽ̨����̬������������ʽ��Ϊ
 (8)
(8)
���֧�������ĵ�Si�ڶ�����ϵ�Ͷ�����ϵ�����������ֱ�Ϊsi��sPi����
 (9)
(9)
ʽ�У�p=(x,y,z)T��ʾp���ڹ̶�����ϵ�µ�λ��ʸ����
����3��֧��ΪԲ�ܶԳƲ�����ʽ����֧���ֱ�ֻ���˶��� ��
�� ��
�� ƽ���ڣ��������ĵ�����������ϵ��
ƽ���ڣ��������ĵ�����������ϵ��
 (10)
(10)
�ɴ˿ɵã���ƽ̨���˶�������Ϲ�ϵΪ
 (11)
(11)
ͨ��ʽ(11)����������(z,a ,b)T��ƽ̨λ�˲���(x, y, z,a ,b ,g)T���ȷ����
2.1 ����
��ת�������ĵ�Ai��B��D�����������ֱ�Ϊai��b��d�������ĵ�S1���������ɱ�ʾΪs1= [r(cos����cos��+sin��)+r/2(cos2��)(cos��-1),0,-r��cos��sin��]T����֧��1�У���֪D����������Ϊd=[l,0,0]T��A1����������a1=[l1+l5,0,0]T����ôB�������ͨ���˳�A1B��BD��Լ��������ã�
 (12)
(12)
����BS1�˳�Լ����ϵ�ɽ�������Ϊ
 (13)
(13)
��ʽ(13)�ɵó������������˳��붯ƽ̨λ�˵Ĺ�ϵʽ��
 (14)
(14)
ʽ�У� ��
�� ��
��
ʽ(14)�к���l1��l2 2��δ֪����ֵ��ȷ������һ��δ֪���������������һ������ֵ��
֧��2�У�A2������������ʾΪ �������ĵ�S2������ϵ�е����������ɼ�Ϊs2������A2S2�˳�Լ����ϵ�ɽ�������Ϊ
�������ĵ�S2������ϵ�е����������ɼ�Ϊs2������A2S2�˳�Լ����ϵ�ɽ�������Ϊ
 (15)
(15)
�ڶ�����ϵ��A2�����ꡢS2�������Ϊ��֪�������˳�l4��ͨ��ʽ(15)ֱ����á�ͬ����֧��3�������˳�l6��ͨ��ͬ���ķ�����á�
2.2 �ٶ�ӳ�估�ſɱȾ���
���ڽṹ����������ڸ���3�����ֵ�Ժ����ڻ�������4������ֵ��֧��1�������������ֵ���÷�ʽ��������ſɱȾ���ʱ�����֧��1�е�����һ��������и�����ͬ2.1�ڸ���l2Ϊ��ֵ���������ֵ���ٶȾ���Ϊ ����ƽ̨�ٶȾ���Ϊ
����ƽ̨�ٶȾ���Ϊ ������ֵ�ٶ��붯ƽ̨�ٶ�֮���ϵ�ɱ�ʾΪ
������ֵ�ٶ��붯ƽ̨�ٶ�֮���ϵ�ɱ�ʾΪ
 (16)
(16)
��ʽ(13)��ʽ(15)�Լ�֧��3ͬ��֧��2��ʽ��Լ�����̷ֱ��ʱ��t�������ɵ�
 (17)
(17)
��ʽ(17)������ֵ�Ͷ�ƽ̨�˶������ķ��������������q��x��ϵ������A��B�ɷֱ��ʾΪ
 ��
��
ʽ�У�r11��r22��r33��aij�ֱ�Ϊ���ڻ����ṹ�����Լ�z��a���ĺ�����i =1, 2, 3��j=1, 2, 3��
��ʽ(16)���б��Σ�
 (18)
(18)
 (19)
(19)
ʽ�У�JΪ�ſɱȾ�����������ƽ̨���ٶȲ�����ͨ��ʽ(18)����ô�ʱ����ֵ���ٶȡ�
3 ��������
3.1 �����ռ����
�����ռ䷶Χ��Ҫ���ɻ������˶��ؽ�ת�Ƿ�Χ�ͽṹ�������ơ�Ϊ����֤��3-RS����[18]ͨ�����������������γɵ�����2R(R)/S-2RS���������ܷ���õ����������ڸ�������������ͬ�ṹ������Լ�������µĿɴ﹤���ռ䷶Χ���趨l=20��l3=70��l5=10��r=10����λ��Ϊmm���趨3-RS����֧��1�е�������ΪA1S1���������ռ�ʱ����A1S1Ϊl1��֧��2��֧��3����������������ͬ�������߶�Լ������Ϊ�� ��
�� ��
�� ��
�� ����λ��Ϊmm���ؽڵ�Լ������Ϊ��
����λ��Ϊmm���ؽڵ�Լ������Ϊ�� ��
�� ��
�� ��
�� ��
��
 ��
�� ��
�� ��
�� ����λ��Ϊ(��)�������˳���ת�Dz�����ʾ��ͼ2��ʾ��ͼ3��ʾΪ�������ڸ���Լ�������¹����ռ�ĶԱȡ���ͼ3���Կ���������2R(R)/S-2RS���������Ĺ����ռ�����ͬԼ�������±�3-RS�Ĺ����ռ䷶Χ����
����λ��Ϊ(��)�������˳���ת�Dz�����ʾ��ͼ2��ʾ��ͼ3��ʾΪ�������ڸ���Լ�������¹����ռ�ĶԱȡ���ͼ3���Կ���������2R(R)/S-2RS���������Ĺ����ռ�����ͬԼ�������±�3-RS�Ĺ����ռ䷶Χ����
3.2 ���նȷ���
���ڵ�2.3�����þ���J����ʽ(18)��������ʽ���б���[19]��
 (20)
(20)
ͼ3 ����2R(R)/S-2RS����������3-RS�������������ռ�Ա�
Fig. 3 Workspace comparison of 2R(R)/S-2RS and 3-RS parallel mechanisms
���У���X��ʾĩ�˹�����������λ�ơ�����ĩ�˹�������������
 (21)
(21)
�ɵã�
 (22)
(22)
ʽ�У�kΪ��Ч�ĵ���ϵ��������ȡk=1 000 N/mm[20]��
��������2R(R)/S-2RS��������ͬһ�߶Ȳ����µ�λ�ͣ���ʱ���ڼ�������2R(R)/S-2RS���������ն�ʱ���趨l2=20 mm���ֱ�ѡȡ�����������ռ���z=60 mm�Ľ��档����ƽ̨ת��ʱ��a��b�ᷢ���仯���նȾ��������ֵҲ��ı䣬�նȾ����еı�������Ϊa��b��ͼ4��ʾΪ����2R(R)/S-2RS������3-RS����ͬԼ�������µĸնȾ������С����ֵEȡֵ�����
��ͼ5��֪���նȾ������С����ֵ�����ĵ㴦��������ĵ�����Χ��С�����У���z=60 mm��ͬ���洦������2R(R)/S-2RS�����նȾ��������ֵȡֵ��ΧҪ���Դ���3-RS��������ֵ��ȡֵ��Χ�������ڻ���֧�����������������������ն����ܵõ����������Ӷ��������ִ����ӹ�����ľ��ȡ�
3.3 �����Է���
����������ͨ�������ſɱȾ�����㣬����������ͨ���������м���[19]���������£�
 (23)
(23)
ʽ�У�

ͼ4 ��ƽ̨��x, y�����ƶ���ת�Ǧ�, �µĹ�ϵ
Fig. 4 Relation of translational motion along x, y and ��, �� rotation angle of moving platform

ͼ5 ��ͬԼ�������»����ն����ܶԱ�
Fig. 5 Stiffness performance comparison of both mechanisms under the same constraint condition
 (24)
(24)
��ʽ(24)��������ȡƽ���ã�
 (25)
(25)
����JTJ��������ֵ��Ϊ����J����������ʾΪ ��ͬ��������JTJ��С����ֵ�ĵ���ΪJ-1����������ʾΪ
��ͬ��������JTJ��С����ֵ�ĵ���ΪJ-1����������ʾΪ ����
����
 (26)
(26)
ѡȡ�����������ռ���z=60 mm�Ľ��棬�������ڴ�Լ�������µ�������ȡֵ��ͼ6��ʾΪ�������ڽ���z=60 mmʱ���ſ˱Ⱦ����������ȡֵ����a ��b ȡֵ�仯�������
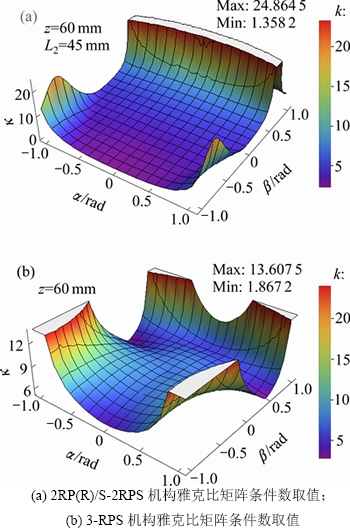
ͼ6 ��ͬԼ�������»����������ܶԱ�
Fig. 6 Dexterity performance comparison of both mechanisms under the same constraint condition
��ͼ6��֪������2R(R)/S-2RS������������������СֵΪ1.358 2�����ֵΪ24.864 5������ȡֵ��С������������СֵС��3-RS��������Сֵ��ͬʱ���Ա�ͼ6(a)��ͼ6(b)���Կ�������֧��1����������������������ֵ��ֵ��������������ù����ռ䷶Χ��ԭ�л����������ӡ�
Ϊ�ۺ϶Ա�3-RS������2R(R)/S-2RS�����������ܣ��˴���һ�������˹����ռ�ĵ������ն���С����ֵ��ֵ����������ֵ�����У������ɴ﹤���ռ����û�����Լ�����������������ĵ������м��㣬���߶Ⱥؽڲ�������������λΪ1�������ռ������ΪN���ն���С����ֵ��ֵΪ���������������Χ�ڸ���ն�����ֵ��ƽ��ֵ����Ϊ�ģ���������ֵΪ���������������Χ�ڸ�����������ƽ��ֵ����Ϊ�ӡ���1��ʾΪ����������ͬ�ṹ�����¸������ܵ��ۺ϶Ա������
��1 3-RS������2R(R)/S-2RS�������ۺ����ܶԱ�
Table 1 Comprehensive comparison of 3-RS mechanism and 2R(R)/S-2RS mechanism

�ӱ�1��֪����3-RS����������������֧�����乤���ռ����N���ն���С����ֵ��ֵ�ĺ���������ֵ�ӽϳ�ʼ������������Լ2�����Ӷ��������������ܵõ�������
4 �˶�ʵ�����
4.1 ����·���滮
Ϊ֤����ƿ����Լ�����ʵ��Ӧ�õ����������ڶԻ���ģ��Ӧ���ڻ���Բ���μӹ��켣���������˶��켣�滮�����о������ȣ�������P1����м����˶���P2�㣬����P2������˶���P3���ٶ�Ϊ0 mm/s��Ȼ����ĩ��ƽ̨��P3����Բ���켣�����˶���P4�㣬����Բ��������P1���ٶ�Ϊ0 mm/s����ͼ7��ʾ��
���ݸ��˶��θ������������ü��ٶȷ���Ϊ���ζ���ʽ����ƽ̨��x��y����ļ��ٶȿɱ�ʾΪ
 (27)
(27)
ʽ�У�j=1, 2, 3��
����ĩ�˵��ٶ�vij(t)������λ��sij(t)���̿ɶ�ʽ(27)ͨ������2�λ��ֵõ���j=x, y�����ݸ��θ���Ҫ����˶������ڲ�ͬ������Ҫ�����ϵ��ͨ������aij(t)��vij(t)��sij(t)������ʱ���λ�Ʋ����������������̱���ʽ��
4.2 ��ֵʵ����֤
ͼ4��ʾΪ������ƽ̨���ĵ�x, y����λ�ƶ�Ӧ��ת����Χ������MATLAB�����Ի�������ʵ�ֹ�ҵ�г�����Բ���켣���з��棬����ƽ̨���ĵ���Ϊ����λ�ã��趨Բ���ι켣�뾶Ϊr1=4 mm�����·����������ʱ��Ϊ8 s������ʱ�䶨Ϊ16 s��������Ϊ500����1�������ڣ�ǰ4 s��ƽ̨���ĵ��P1���ȼ��ٺ�����˶���P3�㣬��4 s��P3�㷵�ص�P1�㡣ͨ��ʽ(14)��ʽ(15)�ɼ���õ���ƽ̨���ĵ��˶��켣����Ӧ�ĸ������˳��ı仯��ͼ8��ʾΪ���ø�����ֵ�ı仯���ߡ�
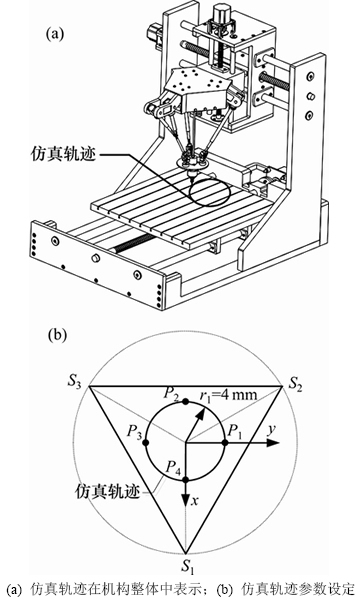
ͼ7 �����˶��켣
Fig. 7 Motion trajectory of simulation
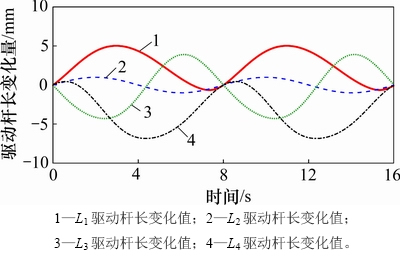
ͼ8 �������ø������˳��仯����
Fig. 8 Simulation curves of driving length changes
��ͼ8��֪���������øߴμ��ٶȺ������������Բ���켣�˶�������ͼ4��x��y�����ƶ���ת����Ϲ�ϵ����֪��ѡȡԲ���ι켣�뾶Ϊr1=4 mmʱ��Ӧ�ϴ��ת�Ƿ�Χ���������õ��ĸ������˳���������ƽ�ȣ���δ���ּ���ͻ�䡣֤������ƻ�������ʵ�������˶��ͻ���Ӧ���ھֲ��ӹ��㲿�����˵�������
5 ����
1) Ϊ��߲��������������ܣ��ڴ�ͳ3-RS������֧������������������֧�������һ������2R(R)/S-2RS���ಢ��������������������������ĩ�����ɶ�Ϊ3�����õ�������������ɶȵ���4�������������������Լ����֤��������2R(R)/S-2RS����Ϊ�ṹ���ಢ��������
2) �Ի��������˾��նȺ��������ܵ��˶�ѧ�������ۣ������ý������������õ��˻��������˶��Ĺ�ϵ���Ա��˷������������ͬԼ�������µ��˶����ܣ�֤��3-RS���������������������γɵ�2R(R)/S-2RS���������ܵõ���������
3) Ϊ��������2R(R)/S-2RS���ಢ�������Ŀɲ����ԣ���Բ���ӹ��켣Ϊ����ʵ�����Ի��������ռ��ڽ����˹켣���档�õ��ĸ������仯��������ƽ�ȣ���δ���ּ���ͻ�䣬֤��������ʵ�������˶�������Ӧ���ں�������ȼӹ���
�ο����ף�
[1] JIANG Yao, LI Tiemin, WANG Liping. Dynamic modeling and redundant force optimization of a 2-DOF parallel kinematic machine with kinematic redundancy[J]. Robotics and Computer-Integrated Manufacturing, 2015, 32(C): 1-10.
[2] SHIN H, KIM S, JEONG J, et al. Stiffness enhancement of a redundantly actuated parallel machine tool by dual support rims[J]. International Journal of Precision Engineering and Manufacturing, 2012, 13(9): 1539-1547.
[3] �߳���, ��־��, �Դ��, ��. Һѹ�������ಢ��������������������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2017, 48(11): 2897-2905.
GAO Changhong, YANG Zhidong, CONG Dacheng, et al. Internal force analysis and rejection of hydraulically driven redundant parallel mechanism[J]. Journal of Central South University (Science and Technology), 2017, 48(11): 2897-2905.
[4] ����, ����, ����, ��. 6PUS�����������˶�ѧ�����궨[J]. �������պ����ѧѧ��, 2016, 42(5): 871-877.
FAN Rui, LI Xi, WANG Dan, et al. Integral kinematic calibration of 6PUS parallel mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(5): 871-877.
[5] �Ը�Ⱥ, ��ʢ, ������. һ�����;��бջ���Ԫ�ĸ߸ն����ಢ������[J]. ��е����ѧ��, 2017, 53(9): 30-37.
ZHAO Fuqun, GUO Sheng, QU Haibo. Novel high stiffness redundant parallel mechanism with closed-loop units[J]. Journal of Mechanical Engineering, 2017, 53(9): 30-37.
[6] GOSSELIN C, SCHREIBER L T. Kinematically redundant spatial parallel mechanisms for singularity avoidance and large orientational workspace[J]. IEEE Transactions on Robotics, 2017, 32(2): 286-300.
[7] GOSSELIN C, LALIBERTE T, VEILLETTE A. Singularity- free Kinematically redundant planar parallel mechanisms with unlimited rotational capability[J]. IEEE Transactions on Robotics, 2017, 31(2): 457-467.
[8] XIE Fugui, LIU Xinjun, ZHOU Yanhua. Development and experimental study of a redundant hybrid machine with five-face milling capability in one setup[J]. International Journal of Precision Engineering and Manufacturing, 2014, 15(1): 13-21.
[9] �Ʋ�ϼ, սǿ, ½��. ����������ṹ����IJ����������ݴ�����[J]. �������պ����ѧѧ��, 2010, 36(12): 1407-1411.
YAN Caixia, ZHAN Qiang, LU Zhen. Fault tolerance of parallel manipulator with actuation or structure redundancy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(12): 1407-1411.
[10] ��־��, ����һ. ��¸նȼ���ģ�ͼ�������֧��ʵ�ֲ��������նȵĸ���[J]. ��е����ѧ��, 2006, 42(10): 142-146.
BAI Zhifu, CHEN Wuyi. Stiffness computation model of spherical joints and PKM��s stiffness improvement by redundant leg[J]. Chinese Journal of Mechanical Engineering, 2006, 42(10): 142-146.
[11] ������, �����, ��Ծ��, ��. 4-RRS�������沢�������ľ���ѧ��նȷ���[J]. ��е����ѧ��, 2015, 51(11): 8-15.
QU Haibo, LIANG Yihan, FANG Yuefa, et al. Statics and stiffness analysis of 4-RRS redundant spherical parallel mechanism[J]. Chinese Journal of Mechanical Engineering, 2015, 51(11):8-15.
[12] EBRAHIMI I, CARRETERO J A, BOUDREAU R. 3-PRRR redundant planar parallel manipulator: Inverse displacement, workspace and singularity analyses[J]. Mechanism and Machine Theory, 2007, 42(8): 1007-1016.
[13] ALAGHEBAND A, MAHMOODI M, MILLS J K, et al. Comparative analysis of a redundant pentapod parallel kinematic machine[J]. Journal of Mechanisms and Robotics, 2015, 7(3): 034502.
[14] ZHOU Xin, XU Yundou, YAO Jiantao, et al. Stiffness modelling and comparison of the 5-UPS/PRPU parallel machine tool with its non-redundant counterpart[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2016, 231(9): 1-12.
[15] QU Haibo, GUO Sheng. Kinematics analysis of a novel planar parallel manipulator with kinematic redundancy[J]. Journal of Mechanical Science and Technology, 2017, 31(4): 1927-1935.
[16] ����, ������, ����ʯ. �ߵȿռ����ѧ[M]. ����: �ߵȽ���������, 2006: 10-15.
HUANG Zhen, ZHAO Yongsheng, ZHAO Tieshi. Advanced spatial mechanism[M]. Beijing: Higher Education Press, 2006: 10-15.
[17] ����, ������, ���鸮, ��. �����������۶�3-RS�����������˶�ѧ����������[J]. ��е��ѧ�뼼��, 2013, 32(1): 34-37.
ZHU Dachang, YAN Zhimin, CUI Xiangfu, et al. Kinematics analysis and simulation of 3-RS-type parallel robot based on screw theory[J]. Mechanical Science and Technology for Aerospace Engineering, 2013, 32(1): 34-37.
[18] ZHANG Jun, ZHAO Yanqin, DAI Jiansheng. Compliance modeling and analysis of a 3-RS parallel kinematic machine module[J]. Chinese Journal of Mechanical Engineering, 2014, 24(4): 703-713.
[19] �ھ���, ������, ��ϣ��, ��. �����˻���ѧ����ѧ����[M]. 2��. ����: ��е��ҵ������, 2008: 203-219.
YU Jingjun, LIU Xinjun, DING Xilun, et al. Foundation of Mathematics of Robot Mechanism[M]. 2nd ed. Beijing: China Machine Press, 2008: 203-219.
[20] GAO Zhen, ZHANG Dan. Performance analysis, mapping, and multiobjective optimization of a hybrid robotic machine tool[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1): 423-433.
(�༭ ����ƽ)
�ո����ڣ�2018-03-26�������ڣ�2018-05-08
������Ŀ(Foundation item)�������У��������ҵ���ר���ʽ�������Ŀ(2018YJS140)��������Ȼ��ѧ����������Ŀ(51475035) (Project(2018YJS140) supported by the Fundamental Research Funds for the Central Universities; Project(51475035) supported by the National Natural Science Foundation of China)
ͨ�����ߣ���ʢ����ʿ�����ڣ����»�����ѧ����������ѧ�о���E-mail: shguo@bjtu.edu.cn
ժҪ��Ϊ��߲��������ھֲ����ܼӹ�ʱ�ĵ�����̬�������˶����ܣ�ͨ���������������ķ�ʽ�����һ������2R(R)/S-2RS�ṹ���ಢ�����������Ի������н������Ժ�λ�������㣬����Լ���˳��������������ٶ�������������̼��ٶ�ӳ������ݽ������ԶԻ��������˶�������⣬�Ա������������ͬԼ���������������Ĺ����ռ䡣�����ſɱȾ��Ի������նȺ��������˶����ܽ��з�����ͬʱ���������������������������ܽ��жԱȡ��о����������ͨ���������������ķ�ʽʹ�������ܵõ���������Բ������Ϊ�˶��켣���Ի�������Բ���켣�˶����̽��з��棬������֤������ƵĿ������Լ���������ʵ�������������
[4] ����, ����, ����, ��. 6PUS�����������˶�ѧ�����궨[J]. �������պ����ѧѧ��, 2016, 42(5): 871-877.
[5] �Ը�Ⱥ, ��ʢ, ������. һ�����;��бջ���Ԫ�ĸ߸ն����ಢ������[J]. ��е����ѧ��, 2017, 53(9): 30-37.
[9] �Ʋ�ϼ, սǿ, ½��. ����������ṹ����IJ����������ݴ�����[J]. �������պ����ѧѧ��, 2010, 36(12): 1407-1411.
[10] ��־��, ����һ. ��¸նȼ���ģ�ͼ�������֧��ʵ�ֲ��������նȵĸ���[J]. ��е����ѧ��, 2006, 42(10): 142-146.
[11] ������, �����, ��Ծ��, ��. 4-RRS�������沢�������ľ���ѧ��նȷ���[J]. ��е����ѧ��, 2015, 51(11): 8-15.
[16] ����, ������, ����ʯ. �ߵȿռ����ѧ[M]. ����: �ߵȽ���������, 2006: 10-15.
[19] �ھ���, ������, ��ϣ��, ��. �����˻���ѧ����ѧ����[M]. 2��. ����: ��е��ҵ������, 2008: 203-219.
