
DOI�� 10.11817/j.issn.1672-7207.2020.10.014

�����ɶȻ���3D��ӡ��������˶�ѧ����
�ſ����س��ǣ����ڷɣ�������
(���ݴ�ѧ ��е���̼��Զ���ѧԺ������ ���ݣ�350116)
ժ Ҫ��
��ӡ�������һ�������ɶȻ���3D��ӡ������������˶�ѧ��������3D��ӡ�������˹���Ϊ2UPR&2RPS�IJ��������Ͷ����ɶ�ʮ���˶�ƽ̨��ɣ����ص�����ʵ��xyz�����˶���ͬʱ��ͨ�����������˶�����

�ؼ��ʣ�
3D��ӡ���������������˶�ѧ�������ռ���������������3D��ӡ��
��ͼ����ţ�TH112 ���ױ�־�룺A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±�ţ�1672-7207��2020��10-2822-12
Design and kinematic analysis of a 5-DOF hybrid 3D printer
ZHANG��Jun, CHI��Changcheng, TANG��Tengfei, FANG��Hanliang
(School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350116, China)
Abstract: To meet the demand of multi-directional 3D printing, a 5-DOF of hybrid 3D printer was proposed and its kinematics was analyzed. The 3D printer was consisted of a parallel manipulator with the topological arrangement of 2UPR&2RPS and a 2-DOF cross motion platform. The printer achieved the ability of multi-directional 3D printing through 

Key words: 3D printer; parallel manipulator; kinematics; workspace; singularity; multi-directional 3D printing
3D��ӡ�����Ч����ࡢ���������ʸߵ��ŵ㣬�ѱ���Ӧ��������ҽѧ�����Ӳ�Ʒ���������[1-3]��Ŀǰ����Ϊ�����3D��ӡ���������ڳ�������(FDM)������ѡ���ս�(SLS)����̻�����(SLA)�ȡ����У�FDM��ʽ��3D��ӡ�������Եͳɱ�����Ч�ʡ���ӡ·���ͽṹ���ص�õ��㷺Ӧ�ã�Ȼ�������ִ�ӡ�����Դ���һЩȱ��[4-5]��1) ��ӡ�IJ�Ʒ���澫�Ȳ��ߣ��׳���̨��ЧӦ��2) ��ӡͷ��̬�̶��������ɽϸ��ӵ��㲿��������Ҫ�϶��֧�Ų��ϣ�3) �����Ѵ�ӡ�IJ�Ʒ���ܽ��ж������ȡ�������ѧ��������ö���3D��ӡ���������������ӡ�����г��ֵ����⣬Ŀǰ���ڶ���3D��ӡ����������2��������ʵ�֣�1) ����3D��ӡ������ĩ��ִ���������ɶȣ���LEE��[6-7]����˻�������ӹ��Ϳ��ٳ���һ��Ļ�����ͨ��ת������̨�ʹ�ӡͷʵ�ֶ���3D��ӡ����Ч������˴�ӡ��������Ӣ��[8]�����һ����ʵ�ִ�Χ�ƶ���ת���������ɶ�3D��ӡ�����ˣ������һ�㲢�����������ռ�С��ת������������⣬����ʹĩ��ִ�������ж���3D��ӡ��������SONG��[9]����������Ӧ����3D��ӡ��ʹ��ĩ��ִ��������б�Ƕ��˶�������ʵ�ֶ����ӡ��YE��[10]���ڿ��ع����������Ŀ��ع����ԡ��߸նȺ��˶����Եȣ����һ�ֶ���3D��ӡ�Ŀ��ع�������������ʵ��������������������IJ��������ܺܺõ���ɶ���3D��ӡ����2) ͨ����ת��ӡƽ̨ʵ�ֶ���3D��ӡ����SINGH��[11]�������Ի���Ϊ����ƽ̨�����xyz�����˶��Ĵ�ӡͷ��ʵ�ֶ���ֲ��ӡ��GAO��[12]�����RevoMaker 3D��ӡ��ͨ��ת������ƽ̨ʵ�ֶ���Ͷ��3D��ӡ��ʵ�ֶ��ƻ��Ͷ��ģ�͵Ĵ�ӡ��Ŀǰ��3D��ӡ��һ���ֲ��ô���ʽ�Ļ��������Ǹ��������������ۻ������۸նȵ͵��ص㣬��ӡЧ���������롣�����ò���ʽ�Ļ�����Delta��Stewart�����������׳����ܲ������������ṹ���ơ������ռ�С�����⣬ʹ�ô�ߴ��Ʒ�Ĵ�ӡ�ܵ�Լ��[13]����ˣ��о����������3D��ӡ�IJ�������������Ҫ���塣�ڲ����������У�2R1T�����ಢ�������Ի���/�˶�ѧ���������ס������ռ�ϴ���ص㱸������[14-18]�����ڷɵ�[19]��������Exechon��Exechon���������˶�ѧ���ܣ����ָò����������нϺõ��˶�ѧ���Ժͽϴ�Ĺ����ռ䣬�ܹ�����������̬���ﵽ��ͬ����Ӧ�õ�Ŀ�ġ��������ಢ�������Ĵ���̬ת�Ǻ����õ��˶�ѧ���ԣ������������һ�������ɶȻ���3D��ӡ�������У����˹���Ϊ��2UPR&2RPS������������������Ϊ�����ģ�飬��ʵ�ִ�ӡͷ���ˡ�Ϊ������3D��ӡ�����ռ�Ϳ˷�����������xy�����˶���Χ�����ƣ���ϴ���ʮ���˶�ƽ̨�ڱ�֤����3D��ӡ��ͬʱ��������ȵ���������״��ӡ��Ʒ�ijߴ硣��������߶�����Ƶ������ɶȻ���3D��ӡ�������ɶȡ��˶�ѧ����⡢�����ռ䡢�����Ժ��˶�����������˶����ܽ����о�������Ϊ����3D��ӡ�ṩһ���µļ���������

ͼ1�������ɶȻ���3D��ӡ����������ģ��
Fig. 1��Virtual prototype model of the 5-DOF hybrid 3D printer
1 �ṹ���������
ͼ1��ʾΪ�����ɶȻ���3D��ӡ��ģ�͡����幹���ɶԳƲ��õ�2UPR&2RPS����������ʮ���˶�ƽ̨���ϼܡ�����������ӡͷ�ͻ�����ɡ��ϼ��ϵĴ�ӡ����ͨ�������������ڲ���������ƽ̨�ϵ�ĩ��ִ����(����ӡͷ)�ϣ���ӡͷͨ������������ʮ���˶�ƽ̨��Эͬ����ʵ�ֶ���3D��ӡ��
Ϊ������3D��ӡ�����ɡ�ģ�黯�������������ģ��Ϊ2UPR&2RPS�IJ�����������ͼ2��ʾ���ɼ��ò��������ɶ�ƽ̨����ƽ̨(����ӡͷ)��2���ԳƷֲ���RPS֧����2��UPR֧����ɡ���4��֧���У��ڲ��ı�֧���˶����ʵ�����£��Խ���֧�����˶�����Ϊ��ҪĿ�꣬����̼��ά��Ϊ֧����ʽ����ģ�黯�Ļ��˽¡�ת���ؽڡ������ϳ�UPR��RPS��֧������ʽ��ʵ��֧������������ģ�黯֧�������˼·��

ͼ2��2UPR&2RPS����������������ģ��
Fig. 2��Virtual prototype model of 2UPR&2RPS parallel manipulator
���У�UPR֧���Ļ��˽�(





���������Ĵ�ӡ�г̺ʹ�ӡ�ռ�һ����ܵ���ṹ�����ƣ�ʹ�ô�ߴ��Ʒ�Ĵ�ӡ���ޣ�Ϊ�ˣ�����������ͼ3��ʾ��ʮ���˶�ƽ̨���˷�����������xy�����˶��IJ��㣬��������3D��ӡ���˶���Χ��ʮ���˶�ƽ̨��Ҫ��x�����ƶ�ƽ̨�����y�����ƶ�ƽ̨����ʹ�ӡ������ɡ���ӡ���̰�װ��x�����ƶ�ƽ̨�����ֱ�ߵ��췽���ƶ�(1T)������y�����ƶ�ƽ̨���ʵ�ִ�ֱ����ֱ�ߵ�����ƶ�(1T)�����ˣ���ӡ���̾���2����ֱ������ƶ����ɶȡ�

ͼ3��ʮ���˶�ƽ̨��������ģ��
Fig. 3��Virtual prototype model of the cross motion platform

ͼ4������3D��ӡ������ͼ
Fig. 4��Schematic diagram of the 5-DOF hybrid 3D printer
����3D��ӡ���Ļ�����ͼ��ͼ4��ʾ��ͼ4�У���






























2 �˶�ѧ����
2.1�����ɶȷ���
Ϊʵ�ּȶ��˶����ɶȣ��趨ͼ4��ʾ���������и��˶����ĵ�λ������������Լ��������

������λ���£�֧��1���˶�����ϵ�ɱ�ʾΪ

ʽ�У�

��ʽ(2)��������

ʽ�У�

ͬ�����ɵõ�֧��2���˶�����ϵ����ͨ������������õ�Լ������ϵΪ

ʽ�У�


֧��3���˶�����ϵΪ

ʽ�У�

��ʽ(5)��������

ͬ�����ɵõ�֧��4���˶�����ϵ����ͨ������������õ�Լ������ϵΪ

4��֧��ʩ�Ӹ���ƽ̨��6��Լ����������Ϊ����������ƽ̨��Լ������ϵ��������Լ������ϵ�������ɵõ�����ģ�鶯ƽ̨���˶�����ϵ��

ʽ�У�




�ṹ��Լ�ʮ���˶�ƽ̨��2�����ֱ��ֱ���˶�������ɣ���������ʵ����
2.2���˶�ѧ���
��ӡ�����˶�ѧ���������£���֪��ƽ̨�ϴ�ӡͷĩ�˵�P����ڴ�ӡ�����ϵ�
Ϊ���ô�ӡ���Ļ�����⣬����ֽ�Ϊ2���ջ�ʸ�������ֱ�Ϊ����ƽ̨��ʮ���˶�ƽ̨����ӡ��Ʒ�Ķ�ƽ̨����ӡ��Ʒ�ıջ�ʸ����L����ƽ̨��2UPR&2RPS֧������ƽ̨����ӡͷ�Ķ�ƽ̨����ӡͷĩ�˵�ıջ�ʸ����N��
��ƽ̨����ϵ



ʽ�У�


��ȫ������ϵ





���ʽ(1)���ɵ�����Լ��������

��ʽ(10)����(11)�ɵõ�

���ˣ�����������λ����
��ӡͷ������

ʽ�У�
�ɱջ�ʸ����N�ɵô�ӡͷĩ�˵�

ʽ�У�

����

ʽ�У�
���ӡͷĩ�˵�




�ɱջ�ʸ����L�ɵã���ӡͷĩ�˵�

ʽ�У�
��ʽ(14)��ʽ(17)����ɵ�

�ڱջ�ʸ����N�У��ɱջ�ʸ����·�����ɵõ����������ջ�ʸ�����̣�

ʽ�У�


ʽ�У�






ͨ������ʽ(18)��ʽ(19)������˶�ѧ���Ϊ

ʽ�У�
��ӡ����ԭ��

��֪��ӡͷĩ�˵�P��

2.3���˶�ѧ����
ͨ��ʽ(21)�����












��ʽ(23)~(26)�ɵù���

ʽ�У�


Ϊ���ʽ(27)����

ʽ�У�





����ʽ(1)��Լ��������֪


������

��ʽ(29)����ʽ(23)~(26)�������ɵã�


��ʽ(29)~(31)����ʽ(22)�ɵ�



3 �����ռ�Ԥ��
�����ռ�Ԥ�����жϴ�ӡͷ��ҵʱ�����ܴﵽ���Χ����Ҫָ�ꡣ������÷ֲ���Ƭ������˼�룬������ӡ���ڴ�ӡ����
1) ��֧��

ʽ�У�



2) ����������R��U��S����ת��Լ�������ֱ����¡�
ת����R��ת��Ϊ

ʽ�У�



���˽�U��ת���Ƕ�Ϊ

ʽ�У�


���S��ת���Ƕ�Ϊ

ʽ�У�



��3D��ӡ�������ռ������������ͼ5��ʾ��
����ͼ5��֪��ӡ�������ռ������������¡�
1) ��





2) �������˶�ѧ�����ر�����ͨ����֧���ƶ������ȡ�ʮ���˶�ƽ̨�����г̡�U����S����R����ת��Լ���������ж���ɢ���Ƿ����乤���ռ��ڡ�

ͼ5�������ռ���������
Fig. 5��Flowchart of workspace researching
3) ������Լ�������Ŀ��е��¼���ֱ���Ƴɴ�ӡװ������̬�����ռ��Լ�λ�ù����ռ䡣
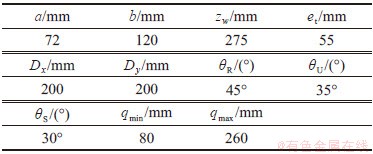
��ͼ1��ʾ�Ļ���3D��ӡ��Ϊ����������������Ԥ���乤���ռ䣬�伸�μ��ṹ�������1��ʾ��
��1������3D��ӡ���ļ��μ��ṹ����
Table 1��Geometric and structual parameters of the hybrid 3D printer
�������ռ��������̵õ�3D��ӡ���ڴ�ӡ����







ͼ6�������ռ�ʾ��ͼ
Fig. 6��Schematic diagram of workspace
��ͼ7(a)��֪����ӡͷ��









ͼ7����̬�����ռ����ͼ
Fig.7��Cross section of orientation workspace

ͼ8��λ�ù����ռ����ͼ
Fig.8��Cross section of position workspace
4 �����Է���
����3D��ӡ���У�ʮ���˶�ƽ̨����������λ�ã������ȷ������ģ�鲢������������λ���DZ����ӡ��ҵ�����г����˶�ͻ��Ĺؼ���
��˲ʱ����ϵ



��4�������������ٶ�

��ʽ(38)����ʽ(39)�ɵõ�

ʽ�У�
��ƽ̨�ϵ�

����2��UPR֧�������й����˽����ĵ�





��ˣ���ʽ(38)��ʽ(41)�ֱ����

���⣬2��UPR֧��������һ����ֱ��


���ʽ(42)��ʽ(43)���ɵã�

ʽ�У�
����2��UPR֧��������Լ������Լ����ż����Լ�2��RPS֧��������Լ����Ҳ��ȣ����ȥԼ���ſ˱���ȵ��������õ�Լ���ſ˱Ⱦ������������ؾ���

��ʽ(40)��ʽ(44)���кϲ����ɹ��첢��������ȫ�ſ˱Ⱦ���

��һ������£������Ϊ2����������������Լ�����졣��Լ���ſ˱Ⱦ������С��

�������ſ˱Ⱦ���


ͼ9��������������λ��
Fig.9��Singular position of parallel manipulator
��ʽ(46)��ȫ�ſ˱Ⱦ���

ͼ10��������������λ��
Fig.10��Singular position of parallel manipulator
�����������õ��ò����������ڽṹ���죬������Լ�����졣�������ṹ����λ�ó����ؽ�ת�ǵ�Լ����Χ���ʿ����жϣ���3D��ӡ��ҵ�Ĺ�����Χ�ڲ���������λ�ã��������˴�ӡ�����г����˶�ͻ�������
5 �˶���������֤
Ϊ����֤����3D��ӡ����ƵĿ������Լ��˶�ѧ���۵���ȷ�ԣ�����SolidWorks������������˶�������֤��Ϊ��ʧһ���ԣ��ڿɴ﹤���ռ���ѡ��3����
��2���ڹ����ռ��ڵĵ���λ��
Table 2��Typical poses within workspace


ͼ11����SolidWorks�����в������λ������
Fig. 11��Position vector of measured point in the SolidWorks software
����3D��ӡ���ķ�����֤������ͼ12��ʾ���ɸ������¡�

ͼ12���˶�������֤����
Fig. 12��Verification flow of motion simulation
1) �ӱ�2��ѡ�����趨�ĵ���λ�ˣ���λ�˴����˶�ѧ��ⷽ�̣���ò���������֧�����ƶ�������
2) ������

3) ���ڲ���1)ѡ��λ���µõ���


4) ���ݲ���2)�����õĵ�Pλ��ʸ���ʹ�ӡͷ����ʸ���Ľ���벽��3)���ۼ��������ɷֱ����P��ϵ

5) ���ز���1)��ѡ����һ������λ�ˣ��ظ�����2)~4)��
��SolidWorks���������õ�λ��ʸ���뷽��ʸ����Matlab���������3��ʾ��λ��ʸ���뷽��ʸ�������Ϊ�㣬��֤ʵ����Ƶ�3D��ӡװ���Ŀ����Ժ��˶�ѧ�����Ƶ�����ȷ�ԡ�
��3���˶�������֤���
Table 3��Verification results of motion simulation

6 ����
1) �����һ�������˹���Ϊ2UPR&2RPS�IJ���ģ��;���2�����ɶȵ�ʮ���˶�ƽ̨��ɵľ���5�����ɶȵĻ���3D��ӡ�����û���3D��ӡ����ʵ��xyz�����˶���ͬʱ��ͨ��
2) �����������۵ķ�����֪�û���3D��ӡ��������ת������ƽ�����˶�����(2R3T)���ɱջ�ʸ����·���õ��˻�����ӡ���˶�ѧ��⣬������ⷽ���Ƶ����˶�ѧ���ⷽ�̡�
3) ���÷ֲ�������˼�룬�õ��˻���3D��ӡ����λ�ù����ռ����̬�����ռ䣬��������������Է�������������û��������˲�����ʵ����ƽ���ķֲ��ӡ�������ܹ�ͨ���ı��ӡͷ����̬ʵ�ֶ���3D��ӡ���ڹ����ռ���������λ�á�
4) ����SolidWorks���������Matlab��д���˶�ѧ������жԱȺͷ�����֤ʵ����3D��ӡ����ƵĿ����Ժ��˶�ѧ�����Ƶ�����ȷ�ԡ�
�ο����ף�
[1] POOLE S, PHILLIPS R. Rapid prototyping of small wind turbine blades using additive manufacturing[C]// 2015 Pattern Recognition Association of South Africa and Robotics and Mechatronics International Conference (PRASA-RobMech). Port Elizabeth, South Africa: IEEE, 2015: 189-194.
[2] ����, ����, ���, ��. 3D��ӡ�ķ�չǰ��: ������֯��ӡ[J]. ��е����ѧ��, 2018, 54(1): 197-204.
WANG Ling, FANG Ao, SHEN Hao, et al. The development frontier of 3D printing: the brain-like tissue printing[J]. Journal of Mechanical Engineering, 2018, 54(1): 197-204.
[3] REN Xiangyuan, SHAO Huiping, LIN Tao, et al. 3D gel-printing: an additive manufacturing method for producing complex shape parts[J]. Materials & Design, 2016, 101: 80-87.
[4] ������, ��Ծ��, Ҷΰ. ˫���3D��ӡ����������˵���������[J]. ��е����ѧ��, 2017, 53(7): 39-46.
CHANG Dingyong, FANG Yuefa, YE Wei. Design and analysis of a double output 3D printing decoupling parallel manipulator[J]. Journal of Mechanical Engineering, 2017, 53(7): 39-46.
[5] WULLE F, COUPEK D, SCHAFFNER F, et al. Workpiece and machine design in additive manufacturing for multi-axis fused deposition modeling[J]. Procedia CIRP, 2017, 60: 229-234.
[6] LEE W C, CHUNG S C. Design of a hybrid 5-axis machine tool with fused-deposition-modeling capability[J]. Applied Mechanics and Materials, 2013, 446/447: 566-570.
[7] LEE W C, WEI C C, CHUNG S C. Development of a hybrid rapid prototyping system using low-cost fused deposition modeling and five-axis machining[J]. Journal of Materials Processing Technology, 2014, 214(11): 2366-2374.
[8] ��Ӣ, ��Ծ��, ������. �����ɶ�3D ��ӡ������������Ƽ�����[J].�й���е����, 2016, 27(17): 2273-2279.
PAN Ying, FANG Yuefa, WANG Congzhe. Design and analysis of five DOF 3D printing parallel robot[J]. China Mechanical Engineering, 2016, 27(17): 2273-2279.
[9] SONG Xuan, PAN Yayue, CHEN Yong. Development of a low-cost parallel kinematic machine for multidirectional additive manufacturing[J]. Journal of Manufacturing Science and Engineering, 2015, 137(2): 021005. DOI: 10.1115/1.4028897.
[10] YE Wei, FANG Yuefa, GUO Sheng. Design and analysis of a reconfigurable parallel mechanism for multidirectional additive manufacturing[J]. Mechanism and Machine Theory, 2017, 112: 307-326.
[11] SINGH P, MOON Y, DUTTA D, et al. Design of a customized multi-directional layered deposition system based on part geometry[C]// Annual Solid Freeform Fabrication Symposium. Austin, 2003: 266-278.
[12] GAO Wei, ZHANG Yunbo, NAZZETTA D C, et al. RevoMaker: enabling multi-directional and functionally-embedded 3D printing using a rotational cuboidal platform[C]// Pcoceedings of the 28th Annual ACM Symposium on User Interface Software and Technology. Charlotte, USA: ACM Press, 2015: 437-446.
[13] �ܻ�, ����, ������, ��. �������3D��ӡ�Ļ������������˶�����[J]. �й���е����, 2017, 28(5): 505-511.
ZHOU Hui, DING Rui, QIN Youlei, et al. Hybrid kinematics mechanisms and its kinematic analysis oriented to multi 3D printing[J]. China Mechanical Engineering, 2017, 28(5): 505-511.
[14] GAN Dongming, DAI Jiansheng, DIAS J, et al. Optimal design of a metamorphic parallel mechanism with reconfigurable 1T2R and 3R motion based on unified motion/force transmissibility[C]// Proceedings of ASME Conference on ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Charlotte, USA, 2016: 1-10.
[15] ZHANG Jun, DAI Jiansheng, HUANG Tian. Characteristic equation-based dynamic analysis of a three-revolute prismatic spherical parallel kinematic machine[J]. Journal of Computational and Nonlinear Dynamics, 2015, 10(2): 021017. DOI: 10.1115/1.4028416.
[16] BULEJ V, URICEK J, POPPEOVA V, et al. Study of the workspace of hybrid mechanism Trivariant[J]. Applied Mechanics and Materials, 2013, 436: 366-373.
[17] �ſ�, ���ڷ�, ������. ������ͺ��սṹ���Ļ�����������ϵͳ�����������������[J]. ������ͨ��ѧѧ��, 2019, 53(1): 1-10.
ZHANG Jun, TANG Tengfei, FANG Hanliang. Conceptual design and performance evaluation of a hybrid flexible manufacturing system for large scale aeronautic components[J]. Journal of Xi'an Jiaotong University, 2019, 53(1): 1-10.
[18] �Ը�Ⱥ, ��ʢ, ������, ��. �������ಢ�������ĸ����ܻ�����������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2019, 50(1): 67-74.
ZHAO Fuqun, GUO Sheng, XU Zichun, et al. Design and analysis of high performance machine tool based on redundant parallel mechanism[J]. Journal of Central South University��Science and Technology), 2019, 50(1): 67-74.
[19] ���ڷ�, ������, �ſ�. ��Exechon��������ģ����ع�����������˶�ѧ����[J]. ����ѧѧ��(��Ȼ��ѧ�빤�̼�����), 2019, 52(7): 733-744.
TANG Tengfei, FANG Hanliang, ZHANG Jun. Conceptual reconfigurable design and kinematic analysis of the Exechon-like parallel kinematic machine[J]. Journal of Tianjin University (Science and Technology), 2019, 52(7): 733-744.
(�༭ �����)
�ո����ڣ� 2020 -01 -23; �����ڣ� 2020 -03 -23
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51875105)������ʡ��У��ѧ������Ŀ(2019H6006) (Project(51875105) supported by the National Natural Science Foundation of China; Project(2019H6006) supported by Industry-Academy Cooperation Program of Fujian Province)
ͨ�����ߣ��ſ�����ʿ�����ڣ����»�����ѧ����������ѧ�о���E-mail: zhang_jun@fzu.edu.cn
ժҪ��Ϊ�������3D��ӡ�������һ�������ɶȻ���3D��ӡ������������˶�ѧ��������3D��ӡ�������˹���Ϊ2UPR&2RPS�IJ��������Ͷ����ɶ�ʮ���˶�ƽ̨��ɣ����ص�����ʵ��xyz�����˶���ͬʱ��ͨ�����������˶�����
[2] ����, ����, ���, ��. 3D��ӡ�ķ�չǰ��: ������֯��ӡ[J]. ��е����ѧ��, 2018, 54(1): 197-204.
[4] ������, ��Ծ��, Ҷΰ. ˫���3D��ӡ����������˵���������[J]. ��е����ѧ��, 2017, 53(7): 39-46.
[8] ��Ӣ, ��Ծ��, ������. �����ɶ�3D ��ӡ������������Ƽ�����[J].�й���е����, 2016, 27(17): 2273-2279.
[13] �ܻ�, ����, ������, ��. �������3D��ӡ�Ļ������������˶�����[J]. �й���е����, 2017, 28(5): 505-511.
