
DOI: 10.11817/j.issn.1672-7207.2016.12.021
���ڻ���·�����ƶ�ʽ��ȫ��ط���
����Ѻ��ǣ������ͣ��Ź�����������
(���ȴ�ѧ �������ѧ�뼼��ѧԺ������ ���ţ�361021)
ժ Ҫ��
Ƶ��ط�����������ͷ�����ڿ����ƶ���С���ϣ��Լ������ʵ����ѯʽ��ء�ͨ�����ƶ�����ͷ��·�����й滮�����һ�ֻ��ڻ���·��������ͷ�ƶ�·���滮�㷨��ʵ���ƶ�ʽ��Ƶ��ص�ԭ��ϵͳ���о�����������봫ͳ�̶�ʽ��ط�ʽ��ȣ�ϵͳ�㷨����������ԣ�����˼�ذ�ȫ�ԣ�����������ƶ�������ȣ�������˼��Ч�ʣ��ǶԴ�ͳ�̶�ʽ��Ƶ��ط�ʽ���������䡣
�ؼ��ʣ�
��Ƶ���������·�����ƶ�ʽ������������
��ͼ����ţ�TP393 ���ױ�־�룺A ���±�ţ�1672-7207(2016)12-4115-07
Secure mobile surveillance based on chaotic paths
WANG Tian, MIAO Haixing, JIANG Wenxian, ZHANG Guoliang, CAI Yiqiao
(College of Computer Science & Technology, Huaqiao University, Xiamen 361021, China)
Abstract: A mobile video surveillance method that cameras are mounted on mobile vehicles to patrol the area was introduced. Through scheduling the movements of cameras, an algorithm based on chaotic paths of mobile cameras was designed and a prototype system of mobile video surveillance was implemented. The results show that the proposed method can increase the randomness and improve the security compared with traditional surveillance methods. Moreover, when compared with the method with random paths of cameras, the proposed method can improve the efficiency, which is a powerful supplement to traditional fixed surveillance methods.
Key words: video surveillance; chaotic paths; mobile surveillance; randomness
�����ġ�911���¼����������������г�������ը����Ӣ���صĵ�����ը�ȿֲ�Ϯ���ķ���ʹȫ���緶Χ�ڶ���Ƶ���ϵͳ�������ǰ���ǡ����г����鹫˾IMS ResearchԤ�⣬ȫ����Ҫ���Һ͵����İ�����Ƶ����豸���������뽫��������������ȫ���г����۶���2009��2013�걣��11.86%��������������ʣ���̫����������15%���ҵ�������[1]����Ƶ����Ѿ���Ϊ�ִ���ᰲ��ϵͳ��һ����Ҫ�İ�ȫ��ʩ������һЩ��Ҫ�����DZز����ٵġ�����Ƶꡢ���С�����ݵȳ�������Ҫ������ͷ�ļ����ȷ����ȫ����ֹ�ܵ��Ƿ����֡��ƻ��Լ�ΪһЩ��������ṩ��������Щ����ͷ���Խ��������ء�Ŀ��ʶ�𡢸���[2]�����Ѿ��������������ķ������档��Ȼ�������Ƶ��ط�չ�dz�Ѹ�٣�Ӧ�÷�Χ��Ϊ�㷺�����ǻ����ڲ������⡣һ���棬�ֽ��������ͷ���ڰ�ȫ���⡣��ͳ������ͷ�����϶���λ�ù̶��ģ�������ǰ���������ͷ���ױ�����������ͨ������ǰ�ȵ㣬�Ӷ���������ʱ��������ͷ�ļ�ء���һ���棬������Ǵ���ä�������ڴ��Ͳֿ��������ҵ��θ��ӣ���Ҫ�ص��صĵ���ܺܶ࣬��Ҫ�䱸�������ͳ�̶�ʽ������ͷ��Ч�ʲ��ߣ��Ҳ���������á���Դ�ͳ����Ĺ̶�λ�õ�����ͷ�����ڵ����⣬����ƶ�ʽ����ͷ��صķ�������������ͷ��װ�ڿ��Կ������ƶ���װ����(���ƶ��Ļ����ˡ�С��)[3-6]�������������������صķ�Χ��Ҳ��ʵ�ֶ�Ŀ��Ķ�Ƕȼ�ء��������������һ�ֻ���·���㷨��ʹ������ͷ���ƶ�·�����л�����(��ȷ���ĵ�����Ԥ֪���˶�״̬)��������İ�ȫ�ԡ����⣬��ʵ����ʵ���һ����µ��ƶ�ʽ��Ƶ���ԭ��ϵͳ��������ƶ�·�����ŵ�TSP(travelling salesman problem)�������÷���û���������ͼ��Ч�ʣ�����������ʵķ�����ȣ��������˼��Ч�ʡ�
1 �ƶ����
1.1 ·�������Ƶ��ƶ����
��2003�꣬���������¹�˾���ҹ��ƹ㳵���ƶ���أ�Ϊ���ڳ������������µķ�������������Ϊ�ִ����е���Ҫ��ͨ��ʽ��ͨ�����ߵ���Ƶ��ؿ���ʱ�̸�֪������������������߶�ͻ���¼��Ĵ���������Ԥ��Σ�յķ�����Ŀǰ���ٳ��˾��������˾�˾����Լ��������ٵȷ��գ����ؼ�ص�Ӧ���ܼ��پ��ķ��������Գ������ٵȶ����¹ʱ����㹻��֤�ݣ�Ϊ�ư����һس����ṩ������
1.2 �ɿ����ƶ�·�ߵļ��
�����ִ������˼����ķ�չ������ͨ���ڻ������ϴ�������ͷʵ�ּ�أ��Ӷ�ʹ����ͷ�߱����ƶ����������������ڴ�ͳ�Ĺ̶�����ͷ��һ���ƶ�ʽ��ء�PASQUALETTI��[8]�����һ�ֻ���Ȩ�ص�ЭͬѲ�߲��ԣ���ÿ����ص�ķ��ʼ����ΪȨ�أ�ʱ����Խ��ķ������ȼ���Խ�ߡ�LEE��[8]�����һ��Ⱥ������˻���ʱ��仯��Ѳ�߷�������Ӧ��ÿ����ص㶼ͨ���������㵱ǰ�İ�ȫ�ȼ�����ȫ�ȼ�Խ�͵�Խ���ȷ��ʡ�KOLLING��[9]���һ�ֶԼ���������ͼ�ָ�ķ��������ǽ���ص������ʾΪͼ����ʽ��FRANCHI��[10]���һ���������ͼ��˼�룺�Ը�����ص㽨��һ�������ͨͼ��TOMIOKA��[11]�����һ������·����ѡ���㷨���÷����ǻ�������ͷ���ӽǺ��Ӿ࣬Ч�����ڻ���TSP�ķ���[12]������·���̶������Ϸ�����Ȼ�������ƶ�ʽ����ͷ����������ͷ�ƶ�·��һ����ƺú���ǹ̶�����ģ���ȫ�Բ��ߡ�����Ѹ��[13]�����һ�ֻ����Ŵ��㷨�ľ���Ѳ���㷨����Ȼ·��������Ч���Ϻã���û���ἰ������ɢ���Ѳ��������ʷ��[14]����Ļ���������Ե����˻�Ѳ��·���滮�㷨��ͨ��������������ķ����滮���·������ͬ�ȵ�Ƶ�ʷ��ʸ����ڵ㣬�Է���Ƶ����Ϊһ����Ҫָ�ꡣ�ɴ˿ɼ���Ϊ��ʹ�����ػ�ø��ߵİ�ȫ�ԣ�·����ѡ���㷨������Ҫ������·���㷨�������Ƶ��صĿɱ�·��ѡ�����÷���ͨ�����·�����������Ӧ��ȫ���⣬����˼��Ч�ʵ����⡣
2 ������ⶨ��
��һ��L��L�Ĵ����ƽ������������ֲ���k�������Ĺؼ��㣬��Ϊn1(x1��y1)��n2(x2��y2)������nk(xk��yk)��һ������������ͷ���ƶ�С������Щ�ؼ��������ѯʽ��أ��ƶ�����Ϊv������С���Խڵ�ni���ʹ�m�Σ�ÿ�α����ʵ���ʱ�̷ֱ�Ϊt1��t2������tm��Ŀ���ǣ�
1) С���Բ���Ԥ֪��·�������������ڵĹؼ��㣬�������ķ������к�ÿһ�ֵķ���ʱ����������(��ȫ��Ŀ��)��
2) ��ÿһ�ֵķ���ʱ�価���ܵ�С(Ч��Ŀ��)��
ͼ1��ʾΪС�����η��ʹؼ����·��ͼ��ͼ����6���ؼ��㣬�ƶ�ʽ����ͷ��Ҫ����Щ�ؼ��������ѯʽ��ء�����С����1�ִ�n1�ؼ��㿪ʼ���ʣ�����·����ͼ1(a)��ʾΪn1��n2��n4��n5��n6��n3�������ʽڵ�n3����һ�����n3�ڵ㿪ʼ���ʣ�����·����ͼ1(b)��ʾΪn3��n2��n6��n5��n1��n4�����һ�����n4�ڵ㿪ʼ���ʣ�����·����ͼ1(c)��ʾΪn4��n2��n1��n5��n3��n6��
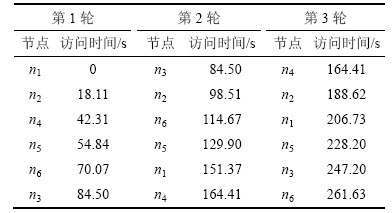
���ؼ���n1��n2��n3������n6������ֱ�Ϊ(10��44)��(46��48)��(30��25)��(8��18)��(30��6)��(58��18) m��С���ƶ�����v=2 m/s����1��ʾΪС�����ʸ������ʱ�䡣�ɼ���ÿһ�ֵ��ƶ�·�����Dz�һ���ģ�����ʱ��Ҳû�����ԵĹ����ԡ�
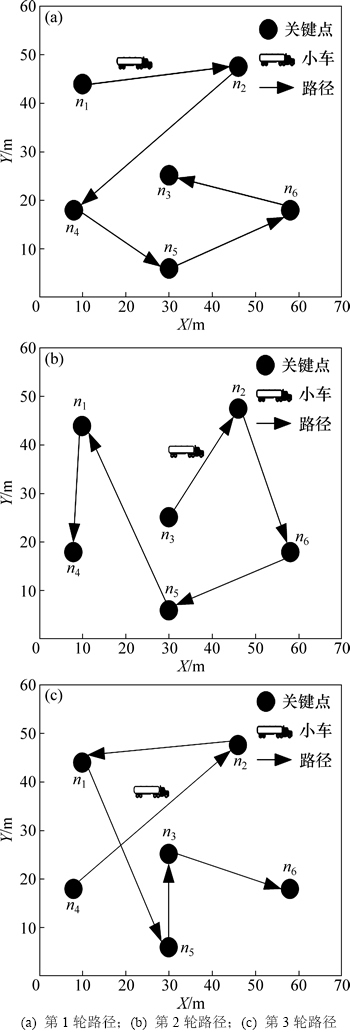
ͼ1 С�����η��ʹؼ����·��ͼ
Fig. 1 Paths of movements of car
��1 С������ʱ��
Table 1 Visiting time of car
3 �㷨���
3.1 �㷨����
���ڶ�����Ľ�ģ������Ľ��������Ҫͬʱ���㰲ȫ��Ŀ���Ч��Ŀ�ꡣ�����Ļ���˼�����ȸ������м�����������1�����ŵ�TSP·����Ȼ��ÿ��������������������TSP·���ϵ���������ľ�����������������������ķ��ʸ��ʡ���ij�����㱻���ʺü���ͻ���ݷ��ʸ���ѡ����һ��������з��ʣ��Դ����Ʋ��ϵض������ڵĹؼ�����з��ʡ��㷨���¡�
�㷨1 ������ԭ���Ļ���·���滮�㷨
���룺n��λ����֪�Ľڵ㣬һ������Ϊn��blacklist����
�����M�ֵĽڵ��������
1:����1��TSP�㷨���1��������У�w1��w2��w3������wn��
2:��ÿ���ڵ�wi�������������n-1���ڵ�ķ��ʸ���;
3:k=1;
4:���ѡȡ1���ڵ���Ϊʼ����;
5:while (k<=M) do
6: ���blacklist������ʼ�������blacklist����;
7: while(blacklistû����)do
8: ���ݼ�����ķ��ʸ��ʣ�ѡ����һ��δ��blacklist�еĽڵ���Ϊ���ʽڵ�;
9: ���õ����blacklist;
10: end while
11: ���blacklist�е����У������һ���ڵ�Ϊʼ���㣻
12: k++;
13:end while
14:END
������n��λ����֪�ļ���w1��w2������wn��������Ϊn����Ϊblacklist�Ķ������ڴ洢ÿһ�����Ѿ����ʹ��Ľڵ㣬ʹ��ÿһ�ֱ������еĽڵ㡣
����1 ���ݼ�������꣬�������е�TSP����㷨(����Ⱥ�㷨)����1��TSP·������ÿ���ڵ�wi�������������n-1������ľ��롣��Ҫǿ�����ǣ�����ڵ��ľ���ļ��㲻������֮���ŷʽ���룬����TSP·��������֮��ij��ȡ�
4���ڵ��TSP·����ͼ2��ʾ���ɼ���ͨ��TSP�㷨�õ���·��Ϊw1��w2��w3��w4��w1�����У�w1����w3�ľ���D13����D13+ D23����ǰ�ڵ㵽�����ڵ�ķ��ʸ����Ǹ���ǰ�ڵ㵽�����ڵ�ľ��볤�ȳɷ��ȣ�������㷽�����£�
 (1)
(1)
���У�ָ����Ϊ��������Ҫͨ��ʵ��õ�һ������ֵ��DijΪTSP·���Ͻڵ�i���ڵ�j�ľ��룻PijΪ�ڵ�i���ڵ�j�ķ��ʸ��ʡ�

ͼ2 4���ڵ��TSP·��
Fig. 2 TSP path of four nodes
����2 ���ѡ��һ������wi��Ϊ�ƶ�����ͷ��ʼ���㣬���blacklist���У�����ʼ�������blacklist�����С�
����3 ��blacklist����δ��������ݷ��ʸ��ʣ�ѡ��һ��δ��blacklist�ļ�����Ϊ�ƶ�����ͷ��һ��Ҫ����ļ��㲢����blacklist�����С�����ִ�в���3ֱ��blacklist���ж��������blacklist���е�Ԫ�ؾ��ǵ�1�ַ��ʵ�·������ʱ�����blacklist���У�����������blacklist�еļ�����Ϊʼ���㣬�ظ�����1~3�����ڶ�����TSP·���ϵĽڵ㣬������ķ��ʸ��ʸߣ�����Զ�ķ��ʸ��ʵͣ�������ԭ���еġ�����ԶС������˱��ĵ��㷨ȡ��Ϊ������ԭ���Ļ���·���滮�㷨��
3.2 ���ܷ�����
���õ�����Ⱥ�㷨���TSP���⣬ʱ�临�Ӷ�ΪO(Tmn2)������TΪ�����ܴ�����mΪ���ϵ�������nΪ̽�ýڵ��������������Ĺ�ģ������ÿ�ֹ����У�������ѡȡn�νڵ㣬���ÿ���㷨��ʱ�临�Ӷ�ΪO(n)���ܵ�ʱ�临�Ӷ�ΪO(Tmn2+n)����Ҫָ�����ǣ�����Ⱥ�㷨����TSP���⣬ֻ��Ҫ�ڳ�ʼ�μ���1�Σ�ʵ��ÿһ�ε���ѯ�����е�ʱ�临�ӶȽ�ΪO(n)��
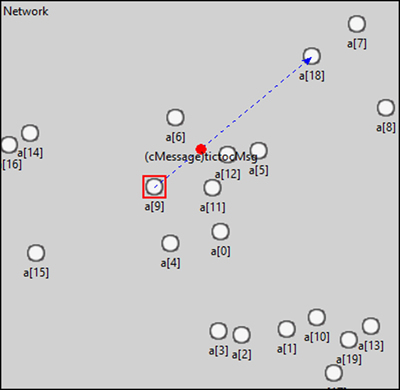
4 ��ʵϵͳ
�����һ���ƶ�ʽ����ͷ��ص�ԭ��ϵͳ��ͼ3��ʾΪϵͳ�ṹͼ��ͼ4��ʾΪԭ��ϵͳ�����ƶ�С����������ͷ��ͨ���������������������绷���½���Զ�̿��ƣ�С����TP-Link·��������Ƭ����Сϵͳ���������������ͷ����ء���ģ�������Ӧ�����豸��ɡ�·��������ͨ������PC�˷�������������нű������ʹ������ݣ��Ӷ�����Ӧ�Ķ���ָ�����Ƭ����ʵ�ֶ�С���Ŀ���(�ƶ�������ơ�����ͷת���)������ʹ�������л����Ƴ���ģʽ��ʹ�䰴Ԥ�������ʻ·��Ѳ�ߡ���Ƭ����СϵͳҲ����С���ĺ��Ŀ��Ʋ�����ʵ�ֶ���ز����Ĵ������������оƬ����С����ǰ��2�����ʹ������������ʻ(ԼΪ2 m/s)����ǰ����Ϊ����ת���֣�����ͷ�����Χ����ʵʩ��ء������յ��Զ���ʻ�������С��������ѭ���㷨�İ����£�ͨ�������Ӧ��ʵ���Զ�ѭ���Ӷ�����Ԥ�����·�߽����ƶ���ء�
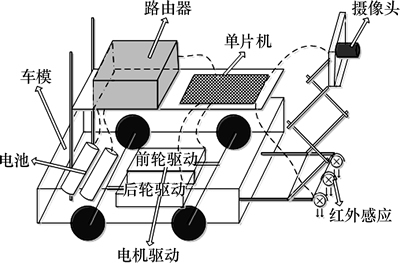
ͼ3 �ƶ�ʽ���ϵͳ�ṹͼ
Fig. 3 Structure of mobile surveillance system
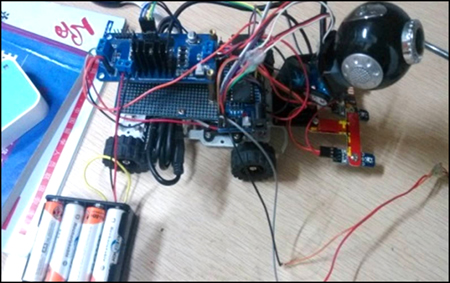
ͼ4 �ƶ�ʽ���ԭ��ϵͳ
Fig. 4 Prototype system of mobile video surveillance
5 ʵ������
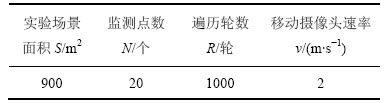
Ϊ���ڽϴ��ģ�ij���������ϵͳ���㷨�����ܣ����ԭ��ϵͳ����ͨ��omnet++4.0������ʵ��������ʵ��ij����������2��ʾ�������ƶ����ʵȻ�������ȡ����ʵʵ��ƽ̨��Ϊ�˽��жԱȣ����Ļ�ʵ���˴�ͳ�Ļ���TSP·���ķ���(��Ϊ�̶�ʽ�����㷨)�Լ��������·���ķ���(����ͷÿ�������ѡ��һ���ڵ���Ϊ���ʵ���һ���ڵ�)��Ϊ�˼�С��ʵ����ȡ10��ʵ��õ����ݵ�ƽ��ֵ��
��2 ʵ�����
Table 2 Experiment parameters
ͼ5 ʵ�鳡��
Fig. 5 Experimental scene
���ȣ�ȷ��ʽ(1)�Цµ�ȡֵ��Ϊ�˶Ԧ´�1��ʼ���ԡ���������Ե������Dz����ķ��ʵĽڵ���ŵ�����Ժ�ÿһ�ֵķ���ʱ�������ԡ���ȡ�γ̼��ķ�����������Եļ�⡣����������������Լ����Ƕ�ij������ȡֵ�����Ƿ�������м��飬Ҳ��Ϊ�γ̼���(Run����)�����������ΪH0������Ϊ��������������ġ�����������������Լ���ͨ���γ�����ʵ�֡�
Ȼ������SPSS19.0.0������������Բ��ԡ���SPSS����������������Լ����У��������γ̹���Zͳ��������������̬�ֲ���������Ӧ�������ʡ���������С�ڻ�����û���������ˮƽ������Ӧ�ܾ������H0����Ϊ����ֵ�ij��ֲ�������ģ��������ʴ���������ˮƽ�����ܾܾ������H0����Ϊ�����ij���������ġ�
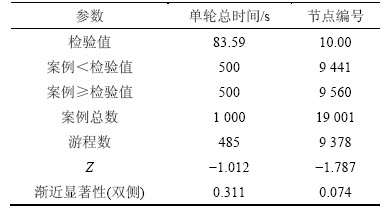
��3��ʾΪ��=1.5ʱ��SPSS�����õ����γ̲��Խ�����ɽ��������Կ�֪����������ˮƽΪ0.05�£��ƶ�����ͷ���ʹؼ���ĵ�����ʱ��ͽڵ��Ų�����������������ԡ�
ͼ6��ʾΪ�ڲ�ͬ�Ħ��»���·���㷨1 000�ַ��������ѵ���ʱ�䡣��ͼ6��֪�����Ŧµ�������ʱ���ڲ��ϼ��٣�Ҳ����˵��Խ��Ч��Խ�ߡ�������Ϊ��ֵԽ�滮��·����Խ�ӽ�TSP·���������ڦ£�1.6���γ̲��Ե�֪��ʵ��õ��ķ���������0.05������ˮƽ�²���������Ե�Ҫ���ڦ�=1.5���£�1.5��ͨ�����γ̲��ԣ���ˣ��µ�ȡֵӦΪ1.5��
��3 �γ̲��ԵĽ��(��=1.5)
Table 3 Result of runs test (��=1.5)

ͼ6 �ڲ�ͬ�Ħ��»���·���㷨1 000�ַ��������ѵ���ʱ��
Fig. 6 Total time of 1 000 rounds in chaotic paths algorithm with different ��
ͼ7��ʾΪ���·���㷨�����·���㷨ǰ10�ַ��������ѵ�ʱ�䡣��ͼ7��֪������·���㷨�����ѵ�ʱ�������������·���㷨(ԼΪ���ߵ�60%)�����ң����·���㷨ÿ��ʱ����������ڻ���·���㷨ƫ����ˣ���Ч���ϻ���·���㷨�Ϻá�
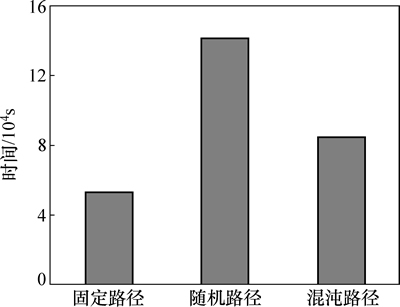
ͼ8��ʾΪ3���㷨�ֱ����1 000�ֺ���ʹ�õ���ʱ��ĶԱ�ͼ����ͼ8��֪���̶�·���㷨�����ѵ�ʱ�����٣��������ڹ̶�·���㷨���ƶ�����ͷ����TSP·�������ƶ���ÿ�ֵ�·����û�б仯������ʱ����̡����·���㷨�����ѵ�ʱ����࣬����·���㷨����ʱ�������·���㷨��2/3���ҡ�
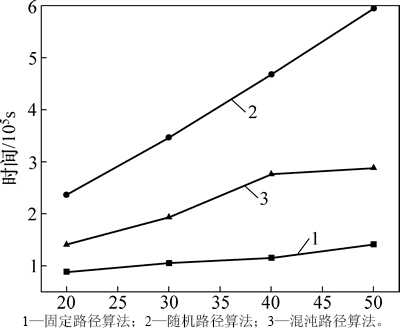
ͼ9��ʾΪ3���㷨�ڱ߳�Ϊ50 m�������γ���������1 000��ʱ��������ʱ����ڵ����ı仯��ϵͼ����ͼ9�ɼ������ų�����ģ����������ʱ��Ҳ�����ӡ����������·���㷨���ӵķ���Ҫ������2���㷨��Ķࡣ�ڽڵ���Ϊ50��ʱ�����·���㷨������ʱ����594 797.420 3 s������·���㷨������ʱ��Ϊ288 083.820 6 s����ʱ���Ч��������·���㷨������50%���ҡ��ɼ������Ź�ģ�������㷨���ƽ���Ϊ���ԡ�
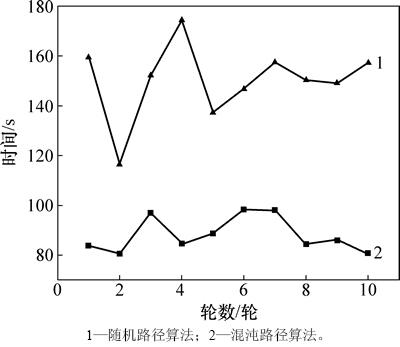
ͼ7 ���·���㷨�����·���㷨��ǰ10��ʱ��Ա�
Fig. 7 Comparison of time of first ten rounds for Random paths algorithm and Chaotic paths algorithm
ͼ8 3���㷨����1 000�ַ��������ѵ���ʱ��Ա�
Fig. 8 Comparison of 1 000 rounds interview total time of three algorithms
ͼ9 �ڲ�ͬ�ڵ��ģ��3���㷨��Ч��
Fig. 9 Comparison of three algorithms with different node numbers
6 ����
1) ��Դ�ͳ��Ƶ����д��ڵİ�ȫ����(����ͷλ�ù̶�����ش���ä����)�������ƶ�ʽ����Ƶ��ط�ʽ���ڿ��ƶ�װ��(С���������)�ϴ�������ͷ������С�����ƶ�����ִ�м�������ǵ���صİ�ȫ�Ժ�Ч�ʣ������һ�ֻ��ڻ���·�����ƶ���Ƶ����㷨��������ƶ�ʽ���ԭ��ϵͳ��
2) �����·���㷨��ȣ����㷨�ļ��Ч��������50%������С���ƶ������ķ������к�ÿһ�ֵķ���ʱ��ͨ�����γ̲��ԣ�֤����Ƶ�·�����������Ҫ����ˣ��÷��������������Ƶ���ϵͳ�İ�ȫ�ԣ�����Ӧ���ڶԼ���нϸ߰�ȫҪ���Ӧ���С�
�ο����ף�
[1] ������. ������ҵ���ؼ汸��Ƶ��ع�˾���п�ͷ[EB/OL]2014-08-01. http://news.hexun.com/2010-07-10/ 124207578.html.
JIANG Yiman. Both offensive and defensive video surveillance security industry are most worth seeing[EB/OL]2014-08-01. http://news.hexun.com/2010-07-10/124207578.html.
[2] HU W, TAN T, WANG L, et al. A survey on visual surveillance of object motion and behaviors[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2004, 34(3): 334-352.
[3] ��Ԫ, ��˧, ����. ������Ϣ�ںϵ��ƶ������˶�λ��·���滮[J]. �����Ӧ��, 2010, 30(11): 3091-3096.
LUO Yuan, SHAO Shuai, ZHANG Yi. Location and path planning of mobile robots based on data fusion[J]. Journal of Computer Applications, 2010, 30(11): 3091-3096.
[4] ��־��, ��. ������ͷ����ѭ���ƶ��г�����ϵͳ�о�[J]. ������ҵ��ѧѧ��, 2010, 30(3): 287-292.
ZHANG Zhiwen, CUI Jian. The research of control system of self-tracking target vehicle with camera[J]. Journal of Xi��an Technological University, 2010, 30(3): 287-292.
[5] ������, ���챣. ���������㷨�����ͻ�����·���滮�㷨[J]. С���ͼ����ϵͳ, 2014, 35(7): 1631-1635.
XU Xiaoqing, ZHU Qingbao. A new mobile robot path planning based on shuffled frog leaping algorithm[J]. Journal of Chinese Computer System, 2014, 35(7): 1631-1635.
[6] ��¶, ������, ����, ��. �ƶ�������·���滮���������㷨�о�[J]. С���ͼ����ϵͳ, 2014, 35(6): 1437-1440.
HONG Lu, GONG Shenglong, WANG Jingzhuo, et al. Immune network algorithm for mobile robot path planning[J]. Journal of Chinese Computer System, 2014, 35(6): 1437-1440.
[7] PASQUALETTI F, DURHAM J W, BULLO F. Cooperative patrolling via weighted tours: performance analysis and distributed algorithms[J]. IEEE Transactions on Robotics, 2012, 28(5): 1181-1188.
[8] LEE J, KWON J W, JI S H. Time-varying patrolling scheme for multi-robots[C]//2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence. Daejeon, Korea: IEEE, 2012: 341-343.
[9] KOLLING A, CARPIN S. The graph-clear problem: definition, theoretical properties and its connections to multirobot aided surveillance[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, USA: IEEE, 2007: 1003-1008.
[10] FRANCHI A, FREDA L, ORIOLO G, et al. The sensor-based random graph method for cooperative robot exploration[J]. IEEE/ASME Transactions on Mechatronics, 2009, 14(2): 163-175.
[11] TOMIOKA Y, TAKARA A, KITAZAWA H. Generation of an optimum patrol course for mobile surveillance camera[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2012, 22(2): 216-224.
[12] LI Y, MA K, ZHANG J. An Efficient Multicore Based Parallel Computing Approach for TSP Problems[C]//The 9th International Conference on Semantics, Knowledge and Grids (SKG). Beijing, China: IEEE, 2013: 98-104.
[13] ����Ѹ, ���, ��һ��, ��. �����Ŵ��㷨�ľ���Ѳ���������[J]. �����Ӧ��. 2011, 31(6): 116-118.
GAN Ruoxun, L Rui, JIANG Yifei, et al. Slution to police car patrolling problem based on genetic algorithm[J]. Journal of Computer Application, 2011, 31(6): 116-118.
Rui, JIANG Yifei, et al. Slution to police car patrolling problem based on genetic algorithm[J]. Journal of Computer Application, 2011, 31(6): 116-118.
[14] ���ʷ�, ����. ����������Ե����˻�Ѳ��·���滮[J]. ����ѧ��(��Ȼ��ѧ��), 2012, 50(6): 787-791.
CAO Panfeng, CUI Sheng. UAV patrolling based on stochastic strategy[J]. Journal of Fudan University (Natural Science), 2012, 50(6): 787-791.
(�༭ �Կ�)
�ո����ڣ�2015-12-10�������ڣ�2016-03-17
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61672441��61572206)������ʡ��Ȼ��ѧ����������Ŀ(2014J01240��2016J01302)������ʡ�Ƽ��ƻ��ص���Ŀ (2014H01010199)������ʡȪ���пƼ��ƻ��ص���Ŀ(2014Z102)(Project(61672441, 61572206) supported by the National Natural Science Foundation of China; Project(2014J01240, 2016J01302) supported by the Natural Science Foundation of Fujian Province of China; Project(2014H01010199) supported by the Key Science and Technology Program of Fujian Province; Project(2014Z102) supported by the Key Science and Technology Program of Quanzhou City)
ͨ�����ߣ������ʿ���������������ƶ�������о���Email��wsnman@gmail.com
ժҪ�������ƶ�ʽ����Ƶ��ط�����������ͷ�����ڿ����ƶ���С���ϣ��Լ������ʵ����ѯʽ��ء�ͨ�����ƶ�����ͷ��·�����й滮�����һ�ֻ��ڻ���·��������ͷ�ƶ�·���滮�㷨��ʵ���ƶ�ʽ��Ƶ��ص�ԭ��ϵͳ���о�����������봫ͳ�̶�ʽ��ط�ʽ��ȣ�ϵͳ�㷨����������ԣ�����˼�ذ�ȫ�ԣ�����������ƶ�������ȣ�������˼��Ч�ʣ��ǶԴ�ͳ�̶�ʽ��Ƶ��ط�ʽ���������䡣
[3] ��Ԫ, ��˧, ����. ������Ϣ�ںϵ��ƶ������˶�λ��·���滮[J]. �����Ӧ��, 2010, 30(11): 3091-3096.
[4] ��־��, ��. ������ͷ����ѭ���ƶ��г�����ϵͳ�о�[J]. ������ҵ��ѧѧ��, 2010, 30(3): 287-292.
[5] ������, ���챣. ���������㷨�����ͻ�����·���滮�㷨[J]. С���ͼ����ϵͳ, 2014, 35(7): 1631-1635.
[6] ��¶, ������, ����, ��. �ƶ�������·���滮���������㷨�о�[J]. С���ͼ����ϵͳ, 2014, 35(6): 1437-1440.
[13] ����Ѹ, ���, ��һ��, ��. �����Ŵ��㷨�ľ���Ѳ���������[J]. �����Ӧ��. 2011, 31(6): 116-118.
[14] ���ʷ�, ����. ����������Ե����˻�Ѳ��·���滮[J]. ����ѧ��(��Ȼ��ѧ��), 2012, 50(6): 787-791.
