
����D-H����任�ĸ�����ʽ�������������˶�ѧ
���£�����������������������
(�����Ƽ���ѧ ��е����ѧԺ��������100083)
ժ Ҫ��
���������õ����������������������ӵ���·���滮�轨��һ�������ġ����ڶഫ����ʵʱ�����Ϣ���˶�ѧģ�͡��Ը�����ʽ����������Ϊ�о�������D-H���꽨ģ����������ӵ��λ����������Ƶ����������������˶�ѧ���̣��õ������λ����Ϣ��������MATLAB����ó�����˶�ѧ�������ۼ������ߡ����˶�ѧ�����Ļ����ϣ�����ADAMS�������������������˶�ѧ����ģ�ͣ��õ�������˶�ѧ�����������ߡ�ͨ�����ۼ���ͷ�������Աȣ���֤���������˶�ѧģ�͵���ȷ�ԣ���Ϊ��������·���滮���˶����Ƶ춨�˻�����
�ؼ��ʣ�
������ʽ������������D-H����任���˶�ѧ�������˶�ѧ������
��ͼ����ţ�TP242.6 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S2-0324-06
Kinematics of composite wheeled submarine vehicle based on D-H coordinate transformation
JIANG Yong, FENG Ya-li, ZHANG Wen-ming, XU Ming-chong
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Abstract: To enable submarine vehicle having a good autonomous navigation to complete the simulation test in deep-sea complex terrain and rough terrain path, it is required to establish a reasonable kinematic model based on multi-sensor of a real-time monitoring information. Taking composite wheeled submarine vehicle as the research object, based on D-H transform modeling method and the feature of complex topographical environment in deep sea, the kinematical equation of the vehicle of deep seabed was deduced and the gesture information of vehicle was obtained, and relevant kinematic parameters curves were gained by using MATLAB tools. Based on the kinematic analysis, using AMAMS software to establish the kinematic simulation model of the vehicle, the kinematic parameters curves were obtained. By comparing theoretical calculations and simulation experimental results the correctness of the established kinematic model was verified, laying the foundation for path planning and motion control of the vehicle.
Key words: composite wheeled submarine vehicle; D-H coordinate transformation; kinematics equations; kinematic simulation
������ʽ������������ӵ��κͶ����ʻ�������������ʽ�н�����Ҫ�߱����õ�����������������ʵ��·���滮�ͱ��ϡ����⣬����Ҫ�������ڶഫ����ʵʱ�����Ϣ���˶�ѧģ�ͣ����ݼ�ʱλ�á������ٶȺͼ��ٶȣ��滮��һ���Ŀ��Ʋ���[1-3]��
�ں��׳��˶�ѧ�о���������о�����������ģ�;�����ƽ̹���⻬������λ���[4-6]����Щģ��ֻ�����ں����������ڶ�άƽ���е��˶����ƣ���X��Y�����ƽ�ƺ���Z���ת�������������������ƽ����ά����ӵ����ϵ��˶��������������һ�ֻ���D-H����任�ĸ�����ʽ�����������˶�ѧ��ģ�������Ƶ���������ʽ�������������˶�ѧ���̡�ͨ�����ۼ���ͷ���Աȿ�֪���÷��̿ɽϺõ������������������˶���������к�����̨��б�µ��������ά��������ʻ�ĺ������������˶�ѧ���⣬Ϊ������������·���滮���˶������ṩ���ۻ�����
1 ������ʽ�������������˶�ѧ
��ģ
������ʽ����������(ͼ1)����4������������൱�ڴ�ͳ��4��4������ÿ�������е�3�������ڸ��������������¿�ʵ��һ���̶ȵĿռ�ṹ�仯���Ӷ��������������ά��������ʻ�����ý½�ʽ���ܣ��˶��������ͨ�����ȶ��ԡ�
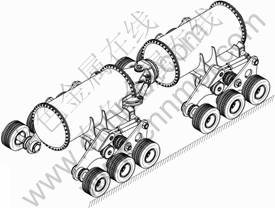
ͼ1 ��������ʽ�������Ļ����ṹ
Fig.1 Basic structure of composite wheeled submarine vehicle
�������������˶�ѧģ�ͽ����������˶��복��֮��Ĺ�ϵ���Ӷ�ȷ�������ڲ�ͬ�˶�״̬��λ�˺��˶�ѧ������Ϊ����ϵͳ�ṩ����[7-9]����ģ�������¼��裺(1)������������ޱ��Σ�(2)�����������֮��Ϊ��Ӵ���(3)�Ӵ���ļ�������λ�ڹ����ĵ�����淨����ӵز��Բ�ܵĽ��㡣
1.1 ����ϵ�Ľ���������任
Ϊ�����˶�ѧģ�ͣ����Ȳ���D-H����任�� ��[10]���ں������������ؽڴ�����һϵ������ϵ��������ϵ�����α任��ʾ(��ͼ2)��
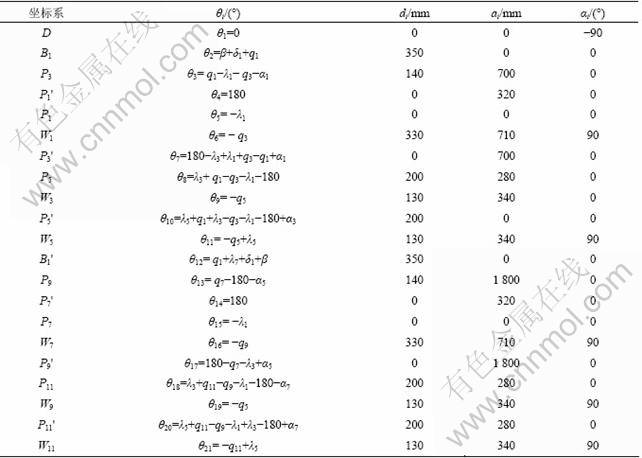
����D-H����任����i��ʾ��Zi-1����ת��Xi-1ת��Xi�ĽǶȣ�di��ʾ�ӵ�i-l����ϵ��ԭ�㵽Zi-1���Xi��Ľ������Zi-1�ľ��룻ai��ʾZi-1��ͺ����������˶�ģ�ͣ��õ�����������ϵ��Ӧ��D-H����(����1)��
�������϶����D-H��������������ϵi���������ϵi-l��λ�˱任����
 (1)
(1)
ʽ�У�C��ʾcos��S��ʾsin��
1.2 ���ǻ��Ƶ��ֵؽӴ�ģ��
�����뺣�ױ���ĽӴ������ͼ3��ʾ�������̶��ں��ױ��������ϵ������Xci��Ϊ�ؽӴ�����е㷽��Zci��Ϊ�ؽӴ���ķ��߷����ڳ��ֵ����Ĵ�����̶��ڳ������ϵ�����ϵ��RΪ���ְ뾶��Xwi����ˮƽ����Zwi������ֱ����Zwi���Zci��֮��ļнǦ�i����Ϊ�Ӵ��ǡ�
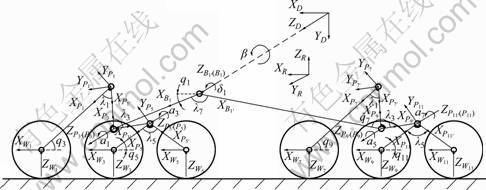
ͼ2 �����������������ϵ
Fig.2 Left coordinate of composite wheeled submarine vehicle
��1 D-H�������
Table 1 D-H coordinate parameters
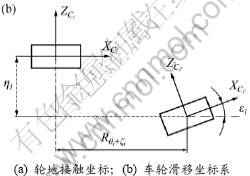
ͼ3 �ֵؽӴ�����ϵת��ģ��
Fig .3 Transformation model of wheel-ground coordinate
Wiϵ��Ciϵ֮�������任��������ɶ��ߵ���ת�任����![]() ���ƽ�Ʊ任�õ�����
���ƽ�Ʊ任�õ�����
 (2)
(2)
������Wi�ڵ���Ci���˶�ʱ�����ܴ���ת���Ʀ�i�������Ʀ�i�Լ����ֹ������Ʀ�i���õ���Ӧ������任����
 (3)
(3)
�Ǧ�=![]() Ϊ����������
����������
1.3 ��������任���˶�ѧ��ģ
������ϵ�Ķ��壬�����������˶�ģ�Ͳ��õ�����任����ͼ4��ʾ��
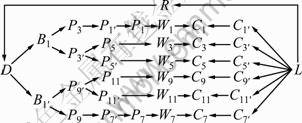
ͼ4 ����任��ϵͼ
Fig. 4 Coordinate transformation diagram
ͼ4�У�CiΪ��i�ֵؽӴ�������ϵ��WiΪ��i������������ϵ��DΪ�нڳ�������ϵ��RΪ�ο�����ϵBiǰ������½ӵ�����ϵ��PiΪ���ؽڵ�����ϵ��LΪ����������ϵ��
����ͼ2�����ij�������ϵ�Լ�ͼ4��ȷ��������任��ϵͼ���������������������Ĵ�Wiϵ����ڲο�����ϵR��λ��Ϊ��
 (4)
(4)
��ˣ�����1��D-H��������ʽ(4)����ȷ������������ο�����ϵ֮���λ�˹�ϵ��
�����������ĸ���������Wi����ں��ױ��������任����Ϊ��
![]() (5)
(5)
�����ֵؽӴ��任�����ֵػ��Ʊ任����������ο�����ϵ�복�ֽӵص�Ci�� ����ϵ֮���˲ʱλ�˹�ϵ[11-14]������֪�������ں�������˶�״̬����ɷ����õ�������˶�״̬����
![]() (6)
(6)
Ϊ�����������������˶���ʹ���������������ٶ�ʸ��![]() (
(![]() Ϊ����ǰ�������ٶȣ�
Ϊ����ǰ�������ٶȣ�![]() Ϊ��������ٶȣ�
Ϊ��������ٶȣ�![]() Ϊ�������·����ٶȣ�
Ϊ�������·����ٶȣ�![]() Ϊ����ƫ�����ٶȣ�
Ϊ����ƫ�����ٶȣ�![]() Ϊ���帩�����ٶȣ�
Ϊ���帩�����ٶȣ�![]() Ϊ���������ٶ�)������ο�����ϵ�ڻ��Ƶ�״̬�£�λ��
Ϊ���������ٶ�)������ο�����ϵ�ڻ��Ƶ�״̬�£�λ��
��������ת������![]() ������
������![]() ��ʱ���أ���
��ʱ���أ���![]() ��
��
![]() ��ʾ���׳��ij���ο�����ϵ�͵�i�����ֽӵص�����ϵ
��ʾ���׳��ij���ο�����ϵ�͵�i�����ֽӵص�����ϵ![]() ֮��ı任����
֮��ı任����
![]() (7)
(7)
�ٸ��ݾ���任�ֵĶ�����Եõ��任����![]() ����
����
 (8)
(8)
�ۺ���ʽ�ɵõ������������������˶��ٶȺͳ����˶��ٶ�֮������Ա任�Ĺ�ϵ�����ſ˱Ⱦ� ��[15-17]��
 (9)
(9)
ʽ�У�![]() Ϊǰ�������Ӱ���ת���ٶȣ�
Ϊǰ�������Ӱ���ת���ٶȣ�![]() Ϊǰ��������½ӵ���ת���ٶȣ�
Ϊǰ��������½ӵ���ת���ٶȣ�![]() Ϊ�ֵؽӴ����ٶȣ�
Ϊ�ֵؽӴ����ٶȣ�![]() Ϊ���ֹ������ٶȣ�
Ϊ���ֹ������ٶȣ�![]() Ϊ����ת�������ʣ�
Ϊ����ת�������ʣ�![]() Ϊ���ֲ��������ʣ�
Ϊ���ֲ��������ʣ�![]() Ϊ���ֹ����������ʡ�
Ϊ���ֹ����������ʡ�
2 ������ʽ���׳��˶�ѧ���۷����������֤
����D-H����任���˶�ѧ���̣���MATLAB�У�����n�ݹ�ţ��-ŷ�������ó�������ʽ����������������������X������ٶ���������(ͼ5)��X�����λ����������(ͼ6)��Y�����λ����������(ͼ7)��
��ADAMS/View�н���������ʽ������������ӵ��λ�������ʻ���˶�ѧ����ģ�ͣ��õ�����������X����ķ����ٶ�����(ͼ5)�ͷ���λ������(ͼ6)��Y����ķ���λ������(ͼ7)��
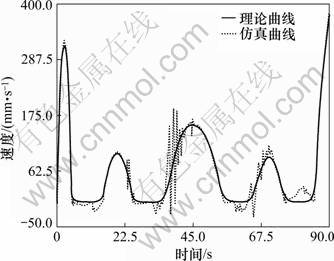
ͼ5 ������������X������ٶ�����
Fig.5 Curves of main body centre��s velocity along X direction
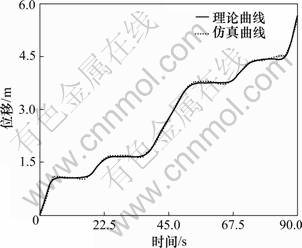
ͼ6 ������������X�����λ������
Fig.6 Curves of main body centre��s displacement along X direction
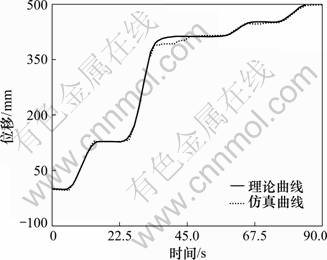
ͼ7 ������������Y�����λ������
Fig.7 Curves of main body centre��s displacement along Y direction
(1) ��Խ�Ϲ����е�5~15 s��25~35 s��55~65 s�Լ�75~85 s�������ڣ�����������λ�����߷�����һ���ĵ��˲�����˵����������Խ�Ϲ����з����������˵�����
(2) ��Խ�ϵ�5~15 s��25~35 s��55~65 s�Լ�75~ 85 s�������ڣ��ٶ����ߴ������²�����С����IJ��Σ�˵����������Խ�Ϲ��������ٶȲ��Ⱥ������˵�����
3 ����
(1) ���һ�ֻ���D-H����任�ĸ�����ʽ���׳��˶�ѧ��ģ������������Ӧ���ά���ӵ��λ������˶�ѧģ�ͣ��õ���ʱλ�á������ٶȺͼ��ٶȲ�����Ϊ����ϵͳ�ṩ������
(2) ��ADAMS/View�н���������ʽ������������ӵ��λ�������ʻ���˶�����ģ�ͣ����������˶�ѧģ�����ߵı仯���ƻ���һ�£������˶�ѧģ�Ϳ������������������˶�ѧ���ԣ�Ϊ������������·���滮���˶������ṩ���ۻ�����
�ο����ף�
[1] ����ȫ, ������, �ߺ���. ����̽�����ҡ�����ܵ��о��뷢չ[J]. �ѧ��, 2008, 29(6): 1655-1700.
DENG Zong-quan, LI Suo-jun, GAO Hai-bo. Research and development of passive rocker suspension of planetary exploration rover[J]. Journal of Astronautics, 2008, 29(6): 1655-1700.
[2] �ս���, ����ȫ, �ߺ���, ��. ��Բ��-Բ��ʽ�������[J].��������ҵ��ѧѧ��, 2006, 38(1): 4-7.
TAO Jian-guo, DENG Zong-quan, GAO Hai-bo, et al. Design of a lunar rover with six cylinder-conical wheels[J]. Journal of Harbin Institute of Technology, 2006, 38(1): 4-7.
[3] ����ȫ, �ߺ���, ���ٴ�, ��. ������ʽ����Խ����������[J]. �������պ����ѧѧ��, 2004, 30(3): 197-201.
DENG Zong-quan, GAO Hai-bo, WANG Shao-chun, et al. Analysis of climbing obstacle capability of lunar rover with planetary wheel[J]. Journal of Beijing University of Aeronautics and Astronautic, 2004, 30(3): 197-201.
[4] Alexander J C, Maddocks J H. On the kinematic of wheeled mobile robots[J]. International Journal Robotics Research, 1989, 8(5): 15-26.
[5] Kanayama Y. Two-dimensional wheeled vehicle kinematics[C]// Proceedings of the 1994 IEEE International Conference on Robotics and Automation. San Diego: IEEE, 1994: 3079-3084.
[6] Borenstein J. Control and kinematics design of multi-degree of freedom mobile robots with compliant linkage[J]. IEEE Transactions Robotics and Automation, 1995, 11(1): 21-35.
[7] ��С��, ̸����, �����, ��. ȫ������ʽ�ƶ������˵��˶�ѧ��ģ�����[J]. ��е����ѧ��, 2008, 44(6): 148-154.
SONG Xiao-kang, TAN Da-long, WU Zhen-wei, et al. Kinematics modeling and analyses of all-terrain wheeled mobile robots[J]. Chinese Journal of Mechanical Engineering, 2008, 44(6): 148-154.
[8] ����ΰ, ����, �����. ��������̽��˶�ѧ��ģ����� [J]. �ѧ��, 2003, 24(5): 456-462.
WANG Zuo-wei, LIANG Bin, WU Hong-xin. Kinematical modeling and analysis of six-wheel lunar rover[J]. Journal of Astronautics, 2003, 24(5): 456-462.
[9] ������, �����, ������. HIT-1�������˶�ѧ����[J]. ��������ҵ��ѧѧ��, 2003, 35(9): 1098-1101.
CAI Ze-su, HONG Bing-rong, L? De-sheng. Kinematic analysis of HIT-1 lunar rover[J]. Journal of Harbin Institute of Technology, 2003, 35(9): 1098-1101.
[10] ����. ������ѧ[M]. ����: ����������ѧ������, 2001: 85- 87.
ZHANG Tie. Robotics[M ]. Guangzhou: South China University of Technology Press, 2001: 85-87.
[11] Richard V. Rover technology development and mission infusion [C]// IEEE ICRA 2005 Planetary Rover Workshop. Barcelona, 2005.
[12] Nohmi M, Miyaharat A. Modeling for lunar lander by mechanical dynamics software[C]// AIAA Modeling and Simulation Technologies Conference and Exhibit 2005. California: AIAA, 2005: 61-68.
[13] LI Yong-quan, LIU Jian-zhong, YUE Zong-yu. NAO-1: Lunar highland soil simulant developed in China[J]. Aerosp Engrg, 2009, 22(1): 53-57.
[14] Lizuka K. Experimental study of wheeled forms for lunar rover on slope terrain[C]// Proceedings of the 9th IEEE International Workshop. 2006: 266-271.
[15] Baller R, Leung W, Barfoot T. Experiment and simulation results of wheel soil interaction for planetary rovers[C]// Proceedings of IROS. Edmonton, 2005: 586-591.
[16] Volpe R, Balaram J, Ohm T, et al. Rocky 7 Mars rover prototype[C]// Proceedings of IEEE International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE, 1996: 1558-1564.
[17] ��ΰ��, ��˴��, ������. ����̽�����ʽ�ƶ�ϵͳ�ṹ��Ƽ��˶�����[J]. ��е��ѧ�뼼��, 2009, 28(7): 881-885.
SHANG Wei-yan, LI Shun-ming, BAO Qing-yong. Structure design and kinematics modeling of a new compound moving system of an exploration robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2009, 28(7): 881-885.
(�༭ ����Ƽ)
�ո����ڣ�2011-06-15�������ڣ�2011-07-15
������Ŀ��������Ȼ��ѧ����������Ŀ(50874006)�����ʺ����������о�������ʮһ�塱��Ŀ(DYXM-115-04-02-03)
ͨ�����ߣ�������(1967-)��Ů�������ˣ����ڣ��������������о����绰��010-62332467��E-mail: ylfeng126@126.com
ժҪ��Ϊʹ�����������������õ����������������������ӵ���·���滮�轨��һ�������ġ����ڶഫ����ʵʱ�����Ϣ���˶�ѧģ�͡��Ը�����ʽ����������Ϊ�о�������D-H���꽨ģ����������ӵ��λ����������Ƶ����������������˶�ѧ���̣��õ������λ����Ϣ��������MATLAB����ó�����˶�ѧ�������ۼ������ߡ����˶�ѧ�����Ļ����ϣ�����ADAMS�������������������˶�ѧ����ģ�ͣ��õ�������˶�ѧ�����������ߡ�ͨ�����ۼ���ͷ�������Աȣ���֤���������˶�ѧģ�͵���ȷ�ԣ���Ϊ��������·���滮���˶����Ƶ춨�˻�����
