
���������С�������͵���ѧϰ�㷨
���1, 2��������1
(1. ����ʦ����ѧ ��������Ϣ��ѧѧԺ������ ��ɳ��410081��
2. ��������ҽѧ�ߵ�ר��ѧУ ������������ģ����� ������422000)
ժ Ҫ��
ժ Ҫ������1���·����Ի���ʱ�����ڶ��������ܺ��������ŵ���ѧϰ�㷨�����о��������÷���ʵ���Ը÷���������֤���÷����Ļ���ԭ���ǣ�������ѧϰ�������������С��ΪĿ�꣬���Կ��������Ķ�������Ϊ�����õ��µ����ܺ������з�������ƣ��о�ȷ���Լ���ȷ����������ɢϵͳ�����ŵ���ѧϰ�ɡ������ܵ���ѧϰ�ɵ�����Ż����⡣�о�������������������·�����ʹ�������С��������֤���˸��㷨����ȷ�Ժ���Ч�ԡ�
�ؼ��ʣ�
LMI����������ѧϰ���������㷨�������
��ͼ����ţ�TP391 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2008)02-0356-06
A new iteration learning algorithm based on smallest erroneous
XIAO Qing-gang1, 2, ZENG Yang-su1
(1. College of Physics and Information Science, Hunan Normal University, Changsha 410081, China;
2. Center of Computer Network, Hunan Shaoyang Medicine College, Shaoyang 422000, China)
Abstract: A new optimal iterative learning algorithm was proposed in the time domain of a linear quadratic performance function, and it is used to simulate some examples. The main contents of this method are as follows: optimizing question to the iteration learning control, aiming at the smallest outlet error of the entire learning process, analyzing and designing new performance function based on punish function of control��s increase of a linear quadratic. The results show that the output error is the smallest using the new method. Simulation results prove the algorithm is accurate and valid.
Key words: LMI method; iteration learning; function; algorithm; error
����ʱ�����ڶ��������ܺ�����ɢϵͳ����![]() �����ŵ���ѧϰ�㷨
�����ŵ���ѧϰ�㷨
��ƣ��������ϻ���ʵ��Ӧ�����Ǻ��м�ֵ���� ��ġ����⣬W. G. Seo��[1-5]�������ܺ���![]()
![]()
��������һ�����ŵ���ѧϰ�����跨��������ƻ�����ֱ�۽��;��ǣ�����������uk+1(i)�ľ�����ʽ��ʹ
�õ�k+1�ε�����������ѧϰ����[0, N]�ڵľ����ʹﵽ��С��ͬʱ����uk+1(i)�����uk(i)��������Ϊ���������ڴˣ��������ߴ�ѧϰ���������������ǵ���ѧϰ���Ƶ����Ż����⣬��������ѧϰ�������������С��ΪĿ�꣬���Կ��������Ķ�������Ϊ�����������ǣ��õ��µ����ܺ�����ɢϵͳ��
![]()
![]() �� (1)
�� (1)
�������������![]() ���õ��������϶��������ܺ�����
���õ��������϶��������ܺ�����
![]()
![]() �� (2)
�� (2)
ʽ�У�Q��R��Ϊ�����Գƾ���
�������ڶ��������ܵ����Ż����⣬���ǻ������ܺ���(1)��(2)����µĵ���ѧϰ�ɣ�ʹ������J�� J(i)(![]() )��С���������ܺ���(1)��(2)������ƿ��Ժܷ���ص���ѧϰ�ٶȣ����ܾ���R���QԽС��ѧϰ�ٶ�Խ�졣
)��С���������ܺ���(1)��(2)������ƿ��Ժܷ���ص���ѧϰ�ٶȣ����ܾ���R���QԽС��ѧϰ�ٶ�Խ�졣
1 ϵͳ����
Ϊ���������㣬�ȿ�����������ϵͳ��
![]() (3)
(3)
ʽ�У�![]() ��x(t)��y(t)��u(t)�ֱ��ʾϵͳ״̬��������������롣��k�ε���ʱ��ϵͳģ�Ϳɱ�ʾΪ��
��x(t)��y(t)��u(t)�ֱ��ʾϵͳ״̬��������������롣��k�ε���ʱ��ϵͳģ�Ϳɱ�ʾΪ��
![]() (4)
(4)
��ʽ(4)�õ����ģ�ͣ�
![]() (5)
(5)
��ʽ(4)��(5)�ã�
![]() (6)
(6)
ʽ�У�![]() ��
��![]() ��
��![]() ��
��![]() ��
��![]() ��
��
���ǣ��������ܺ���(2)����������ϵͳ(3)�����ܺ�����
![]() �� (7)
�� (7)
���ϵͳ(3)��Ҫʵ�ֵ���ѧϰ���ƹ������Ż���Ҳ���������Ӧ�ĵ���ѧϰ�ɣ�ʹ�ö�������![]() ����k����ʱ��J(t)�ﵽ��С��
����k����ʱ��J(t)�ﵽ��С��
�ٿ���һ����ʽ��������ɢϵͳ��
![]() (8)
(8)
ʽ�У�![]() ��״̬����
��״̬����![]() Rn���������
Rn���������![]() Rm���������
Rm���������![]() Rr��A��B��C��DΪ��Ӧά����ϵ��������ʽ(6)�У�
Rr��A��B��C��DΪ��Ӧά����ϵ��������ʽ(6)�У�
![]() ��
�� ![]() (9)
(9)
![]()
![]() �� (10)
�� (10)
![]()
![]()
![]() �� (11)
�� (11)
����i��2��![]() , j��i��
, j��i��
![]() ��
��
��ʽ(9)~(11)�õ�k�ε���ʱ��״̬����� ��
![]() �� (12)
�� (12)
![]() �� (13)
�� (13)
![]()
![]()
![]() �� (14)
�� (14)
����i��2��![]() ��
��![]()
![]()
![]() ��
��![]() ��xd(i)��ud(i)��yd(i)�ֱ��ʾ��i����ʱ��ϵͳ״̬���������������������ֵ����ʽ(12)~(14)�ɵã�
��xd(i)��ud(i)��yd(i)�ֱ��ʾ��i����ʱ��ϵͳ״̬���������������������ֵ����ʽ(12)~(14)�ɵã�
![]() �� (15)
�� (15)
![]()
![]() �� (16)
�� (16)
![]()
![]() +
+
![]() �� (17)
�� (17)
���У�i��2��![]() ����ʾ��i����ʱ�̣���k+1�ε���ʱ�Ŀ�����������ڵ�k�ε�������������������������ʽ��Ϊ����Ҫ��ȡ�ĵ���ѧϰ�ɡ�
����ʾ��i����ʱ�̣���k+1�ε���ʱ�Ŀ�����������ڵ�k�ε�������������������������ʽ��Ϊ����Ҫ��ȡ�ĵ���ѧϰ�ɡ�
����ʽ(1)�������ܺ�����
![]() �� (18)
�� (18)
��д��������ʽΪ��
![]() �� (19)
�� (19)
�������![]() ����������������
����������������![]() �����ܲ�������
�����ܲ�������![]() ��
��![]() �ֱ�ΪN+1��Q��R��ɵķֿ�ԽǾ���ͬ��Ҳ�������ԳƵġ����ŵ���ѧϰ�㷨����������Ѱ��
�ֱ�ΪN+1��Q��R��ɵķֿ�ԽǾ���ͬ��Ҳ�������ԳƵġ����ŵ���ѧϰ�㷨����������Ѱ��![]() �ľ����ʾʽ��ʹ�����ܺ���J��С��
�ľ����ʾʽ��ʹ�����ܺ���J��С��
2 ȷ����ϵͳ���ŵ���ѧϰ�㷨���
����������������������������ɢϵͳ(6)���������ģ�Ϳɱ�ʾΪ��

��ʾ����2�ε�����ʼ��λ���ʧһ���ԣ��ڴ���ʱ����Ϊ��ֵΪ�㡢����Ϊ![]() �����������
�����������
�����ԣ�ϵͳ(20)������������ɢʱ��ϵͳ��ͬ�Ľṹ��ʽ����������ɢϵͳ��سɹ�[6-9]���������ܺ���(19)���Ż��ĵ���ѧϰ����ƿ��ɶ���1 ������
����1 ������2�ε�����ʼ��λ��![]() ������õ���ѧϰ�ɣ�
������õ���ѧϰ�ɣ�
3 ��ȷ����ϵͳ�����ܵ����㷨���
ʽ(21)�������ĵ���ѧϰ��Ҫ��ȷ��֪��ϵͳģ��G����ģ�Ͱ�����ȷ�����![]() ʱ��ϵͳ(20)��ת��Ϊ��
ʱ��ϵͳ(20)��ת��Ϊ��

![]() ��ʾ�ɻ�õ�ϵͳ���ģ�ͣ�
��ʾ�ɻ�õ�ϵͳ���ģ�ͣ�![]() Ϊ��ȷ������Ƚ������¼��衣
Ϊ��ȷ������Ƚ������¼��衣
����1 ϵͳģ�Ͳ�ȷ����![]() �������½ṹ��ʽ��
�������½ṹ��ʽ��

�����ǰ�������������¶����붨����
����1 ��ϵͳ(23)������ָ��(19)�������ھ���K�������Գƾ���P��ʹ�ö����з����Ek�����㣺

��![]() ��Ϊϵͳ(23)��һ���������ܾ���P�ı����ܵ���ѧϰ�ɡ�
��Ϊϵͳ(23)��һ���������ܾ���P�ı����ܵ���ѧϰ�ɡ�
�����ܵ���ѧϰ�ɡ��������ڶ������Լ�ϵͳ����ָ��֮��Ĺ�ϵ�����¶�����ʾ��
����2 ��![]() ��ϵͳ(23)������ָ��(19)��һ���������ܾ���P�ı����ܵ���ѧϰ�ɣ�������������IJ�ȷ���ԣ��������ϵ����ģ���ڵ��������Ƕ����ȶ��ģ�����Ӧ������ָ��ֵ����
��ϵͳ(23)������ָ��(19)��һ���������ܾ���P�ı����ܵ���ѧϰ�ɣ�������������IJ�ȷ���ԣ��������ϵ����ģ���ڵ��������Ƕ����ȶ��ģ�����Ӧ������ָ��ֵ����![]() ������E1��ʾ��1�ε���ʱ��ϵͳ��
������E1��ʾ��1�ε���ʱ��ϵͳ��
![]() (27)
(27)
����3 ![]() ��ϵͳ(23)�ı����ܵ���ѧϰ�ɣ����ҽ������ڳ����ţ�0������
��ϵͳ(23)�ı����ܵ���ѧϰ�ɣ����ҽ������ڳ����ţ�0������![]() �ͶԳ���������Pʹ��
�ͶԳ���������Pʹ��

4 �����ܵ���ѧϰ�ɵ��Ż�
����3�����ı����ܵ���ѧϰ�������һ������²�һ����Ωһ�ģ����¶������������ܵ���ѧϰ�ɵ��Ż���Ʒ�����
����4 �������Ż����⣺
5 �� ��
Ϊ����֤������������Ч�ԣ�ѡȡ������ɢϵͳ��Ϊ����ʵ����
�����������������õ�ϵͳ(4)�ڵ�������������ʽ�����ģ�͡���������(19)��ʾ�����ܺ���������ϵͳ�������yd(i)=i2/100-i+200���ڼٶ�ϵͳ(29)ȷ���벻ȷ��2������£��������·��档
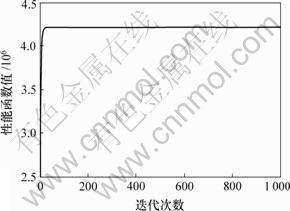
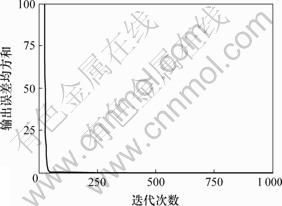
����1 ��a=-0.8��b=0.5��c=1��d=1.2�����ݶ���1������ŵ���ѧϰ�ɣ���ѡ��Q=3I��R=I��IΪ21��21��λ��������MATLAB����TOOLBOX�еĺ������ɵ�ϵͳ���ܺ���ֵ�����ѧϰ�����Ĺ�ϵ������ͼ1��ʾ����Ӧ��ϵͳ����������������ѧϰ�����Ĺ�ϵ������ͼ2��ʾ���������ܺ�����ȡQ=3I��R=0.1I����õ���ͼ3��ʾ�����ܺ���ֵ�����ѧϰ�����Ĺ�ϵ���ߣ���Ӧ��ϵͳ����������������ѧϰ�����Ĺ�ϵ������ͼ4��ʾ��
�Ƚ�ͼ2��ͼ4���Կ��������ܾ���R����ھ���QԽС������������Խ�졣��������ñ��ķ�����Ƶ���ѧϰ�ɣ����Ժܷ���ض�ѧϰ�ٶȽ��е��ڡ�
�Ƚ�ͼ1��ͼ3��֪������R�ļ��٣����ܺ����������Ե�����Ч������ͼ2��ͼ4���Կ��������ܾ���R����ھ���QԽС�������������ٶ�Խ�죬������������С��

ͼ1 Q=3I��R=Iʱ���ܺ���ֵ�����������ϵ����
Fig.1 Relationship between properties value and iterative times when Q=3I and R=I
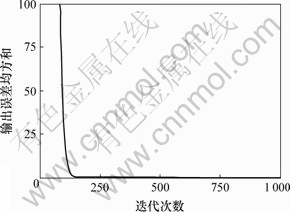
ͼ2 Q=3I��R=Iʱ����������������������ϵ
Fig.2 Relationship between average error of output and iterative number when Q=3I and R=I
ͼ3 Q=3I��R=0.1Iʱ���ܺ���ֵ�����������ϵ����
Fig.3 Relationship between properties value and iterative number when Q=3I and R=0.1I
ͼ4 Q=3I��R=0.1Iʱ����������������������ϵ
Fig.4 Relationship between average error of output and iterative number when Q=3I and R=0.1I
����2 ��һ������ϵͳ(29)�IJ�ȷ���ԣ�����ϵͳ���ģ�Ͳ����ֱ�Ϊ��a=-0.8��b=0.5��c=1��d=5���ɼ���1֪��ϵͳģ�Ͳ�ȷ����![]() �������½ṹ��ʽ��
�������½ṹ��ʽ��
��������������(29)��������̲���d�ı仯����![]() �����ѡȡ
�����ѡȡ![]() ��
��![]() (IΪ21��21��λ����)�����ݶ���3�Ͷ���4��Ʋ��Ż�����ѧϰ�ɣ�ȡ���ܾ���
(IΪ21��21��λ����)�����ݶ���3�Ͷ���4��Ʋ��Ż�����ѧϰ�ɣ�ȡ���ܾ���![]() ��
��![]() ������
����ã���![]() ʱ����Բ�ȷ����ϵͳ(23)�����ܺ���(19)���ɵõ����ű����ܵ���ѧϰ��
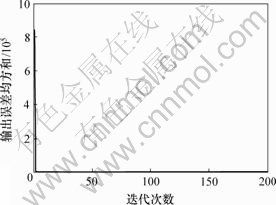
ʱ����Բ�ȷ����ϵͳ(23)�����ܺ���(19)���ɵõ����ű����ܵ���ѧϰ��![]() ����ʱ�����ܺ���ֵ������������������ѧϰ������ϵ���߷ֱ���ͼ5��ͼ6��ʾ���ɼ����������ܺ�������������ʵ����������ܺ���ȡ�úõ�����Ч������������ﵽ��С��
����ʱ�����ܺ���ֵ������������������ѧϰ������ϵ���߷ֱ���ͼ5��ͼ6��ʾ���ɼ����������ܺ�������������ʵ����������ܺ���ȡ�úõ�����Ч������������ﵽ��С��

ͼ5 L=0.3I��Q=3I��R=Iʱ���ܺ���ֵ������������ϵ����
Fig.5 Relationship between properties value and iterative number when L=0.3I, Q=3I and R=I
ͼ6 L=0.3I��Q=3I��R=Iʱ����������������������ϵ
Fig.6 Relationship between average error of output and iterative number when L=0.3I, Q=3I and R=I
6 �ᡡ��
a. �ڵ��������ȶ����˶��������ܺ���������µ����ܺ���ָ���о���ȷ������ȷ����������ɢϵͳ�����ŵ���ѧϰ�ɡ������ܵ���ѧϰ�ɵ�����Ż����⣬ʹ���������С���ﵽ��Ԥ�ڵ�Ч����
b. ������IJ�ȷ����ϵͳ�����Ļ���LMI�����ı����ܵ���ѧϰ����Ʒ�����������������������֤��ͬʱ����ʹ��MATLAB�����䷽�㡢������⡣
c. ͨ���ʵ��������ܺ����еIJ�������ʹ���ܾ���R����ھ���Q�������٣��Ӷ�ʹ������ܿ���������������С��ͬʱ�����Ƶ�����ѧϰ�ٶ�Ҳ�õ���ߡ�
�ο����ף�
[1] Seo W G, Park B H, Lee J S. Intelligent learning control for a class of nonlinear dynamics systems[J]. IEE Proc Control Theory Application, 1999, 146(2): 165-170.
[2] �� ��, �� ��. ����ѧϰ��������[M]. ����: ������ҵ��ѧ������, 1998.
LIN Hui, WANG Lin. Control theory of iterative learning[M]. Xi��an: Press of Northwest Industrial University, 1998.
[3] л��, ������. �ֲ�����ϵͳĿ����ٵĶ���P ��ѧϰ�㷨[J]. ���ϴ�ѧѧ��, 1998, 16(1): 42-47.
XIE Zheng-dong, LIU Yong-qing. Distributed parameter system target tracking two steps P learning algorithm[J]. Journal of Jinan University, 1998, 16(1): 42-47.
[4] ��ʤԾ, ����ƽ, ������, ��. ����LMI�����ı����ܵ���ѧϰ�㷨���[J]. �Զ���ѧ��, 2006, 32(4): 578-585.
YANG Sheng-yue, FAN Xiao-ping, NIAN Xiao-hong, et al. Designing of guaranteed cost iterative learning algorithms based on LMI method[J]. Acta Automatica Sinica, 2006, 32(4): 578-585.
[5] �� ӱ, ������, ������. ����ͼ���ؽ��ĵ����㷨�о�������[J]. ��е�������Զ���, 2006(4): 37-39.
LIU Ying, LI Zheng-fei, XIAO Guang-yu. Study and simulation on the ART algorithm of figure image reconstruction[J]. Mechanical Engineering and Automation, 2006(4): 37-39.
[6] �� ��. ��ȷ����ɢϵͳ�����ű����ܿ���[J]. ����������Ӧ��, 1999, 16(5): 639-642.
YU Li. Indefinite separate system optimal performance control[J]. Control Theory and Application, 1999, 16(5): 639-642.
[7] �����, �콨��. ���Ի������˵Ŀ���[J]. ����������Ӧ��, 1994, 11(2): 226-228.
ZHOU Qi-jie, XU Jian-min. Control of flexibility machine robot[J]. Control Theory and Application, 1994, 11(2): 226-228.
[8] ����ƽ, �콨��, �����, ��. ���Ի����˵Ķ���ѧ��ģ������[J]. ����������Ӧ��, 1997, 14(3): 318-329.
FAN Xiao-ping, XU Jian-min, ZHOU Qi-jie, et al. Dynamics modeling and control of flexible robot[J]. Control Theory and Application, 1997, 14(3): 318-329.
[9] YU Li, WANG Jin-cheng, CHU Jian. Guaranteed cost control of uncertain linear discrete-time systems[C]//Proceedings of American Control Conference. Albuquerque, 1997: 3181- 3184.
[10] Gunnarsson S, Norrlof M. On the design of ILc algorithms using optimization[J]. Automatica, 2001, 37(12): 2011-2016.
[11] Norrlof M. An adaptive iterative learning control algorithm with experiments and industrial robot[J]. IEEE Transactions on Robotics and Automation, 2002, 18(2): 245-251.
[12] Frueh J A, Phan M Q. Linear quadratic optimal learning control[J]. International of Control, 2000, 73(10): 832-839.
[13] CHENG Shao, RONG Gao-fu, YANG Yi. Robot stability of optimal iterative learning control and application to injection molding machine[J]. Automatica, 2003, 29(1): 73-79.
[14] ������, ���Ļ�, ��ս��. һ�ָĽ��ķ�������ɢϵͳ����ѧϰ�����㷨[J]. ��ѧ�����빤��, 2007, 22(7): 5776-5780.
CHEN Ruo-zhu, AI Wen-huan, LI Zhan-ming. Improved iterative learning control algorithm for nonlinear discrete systems[J]. Science and Technology and Engineering, 2007, 22(7): 5776-5780.
�ո����ڣ�2007-07-16�������ڣ�2007-09-26
������Ŀ������ʡ��Ȼ��ѧ����������Ŀ(05F0018)
ͨ�����ߣ�Ф���(1956-)���У����������ˣ������ڣ�˶ʿ�о��������¼����Ӧ�ü�������Ϣ�����о����绰��0739-5395956��E-mail: shaojiew@163.com
