
DOI�� 10.11817/j.issn.1672-7207.2020.09.010
����װ�ػ�����Һѹϵͳ�������Է���
�½���1, 2��������1����˼Զ1��κ��3����־ΰ1
(1. ���ִ�ѧ ��е�뺽�պ��칤��ѧԺ������ ������130022��
2. ���ִ�ѧ ������������ƹ����ص�ʵ���ң����� ������130022��
3. ����ְҵ����ѧԺ ְҵ������������ ������130033)
ժ Ҫ��
����������Һѹϵͳ��̬����ƥ��ĺ����ԣ��о���������Һѹϵͳ�Ĺ������ԣ���ij�ͺŻ���װ�ػ�Ϊ��������������Һѹϵͳԭ�������������Ĺ��ʷ�������ģ�ͣ�����AMESim������Virtual Lab Motion���嶯��ѧ�������������Ķ���������Ϸ���ģ�ͣ������������»���װ�ػ�����Һѹϵͳ�Ĺ������ԣ���ͨ��ʵ����֤����ģ�͵�ȷ�ԡ��о��������������ת��뾶�ļ�С������װ�ػ�����ϵͳ���������������װ�ػ�ֱ����ʻʱ������ϵͳ���Ĺ��ʽ�С������ת��ʱ��ת���ڲ�ֻ�����������ʣ�˫��ת��ʱ������ϵͳ���Ĺ��ʽӽ�����������ʡ�
�ؼ��ʣ�
����װ�ػ�����������������ϵͳ�����Ϸ�����ʵ����֤��
��ͼ����ţ�TH243 ���ױ�־�룺A
���±�ţ�1672-7207��2020��09-2451-09
Analysis of power characteristics of traveling hydraulic system of skid-steer loader
CHEN��Jinshi1, 2, HUO��Dongyang1, LIU��Siyuan1, WEI��Xing3, ZHANG��Zhiwei1
(1. School of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China;
2. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China;
3. Vocational Foundation Department, Changchun Vocational Institute of Technology, Changchun 130033, China)
Abstract: To improve the rationality of dynamic power matching between skid-steer loader engine and hydraulic system, the power characteristics of the traveling hydraulic system of skid-steer loader were studied, and taking a certain model of skid-steer loader as an example, the theoretical model of power characteristics was established. AMESim software and Virtual Lab Motion multi-body dynamics software were used to establish the corresponding joint simulation model, and the power characteristics of the traveling hydraulic system of the skid-steer loader under typical working conditions were simulated and analyzed. The accuracy of the simulation model was verified through experiments. The results show that with the decrease of steering radius, the output power of the traveling system of skid-steer loader increases gradually; the traveling system consumes less power when skid-steer loader runs straight; there is parasitic power in the inner steering wheel when the vehicle is of unilateral steering; the power consumption of the traveling system is larger when the vehicle is of bilateral steering.
Key words: skid-steer loader; power characteristics; traveling system; co-simulation; experimental verification
�����������ҹ�������ʩ���費�����ƣ����·�����ݽ���ά���εı����£�С���̻�е��չѸ�١�����װ�ػ�ƾ����ṹ���ա���ҵ���ɹҽӸ��ֹ���װ������Ӧ��ͬ����ҵ���������ƣ�Խ��Խ�ܵ��г�������[1]��Ŀǰ��������͵Ļ���װ�ػ������ܡ��ͺĵȷ����ձ�ȹ��ڻ��͵��ţ�ռ���Ÿ�����г��ݶ����ԭ���ǹ��ڳ����ڶԻ���װ�ػ��������ʱ��ͨ��ֻ���������ľ�̬����ָ�꣬�������������Ķ�̬����[2]�����¹��ڻ��͵Ļ���װ�ػ���������Һѹϵͳ�Ĺ���ƥ������Խϲ��λ���ʵ�ȼ���������Աȹ���ͬ�ȶ�λ���͵ĸߣ�ȱ���г����������ֽΣ�����̻�е���о��ѱȽϳ��죬�з��ص��༯�������������������Լ�����ƥ������ϣ���Ŀ����Ҫ��������������������ʣ������ͺġ�KIM��[3]����Matlab /Simulink��������ʽװ�ػ����嶯��ѧģ�ͣ������˵������������Ķ�̬�����������ԣ�LEE��[4]�о��˻�϶����ھ����ϵͳ���ü����ʿ��Ʋ��ԣ�����������ϵͳЧ�ʣ�CUI��[5-6]���ڷ�����������������С�ͺĵ�ƥ��ԭ���о��˷�������Һ���������Э�����ԣ�ʵ����Һ��-��е�����ƥ�䡣�ڹ��ڹ��̻�е��ҵ����٩��[7]����������ƽ�峵���й����еĹ��ʷ��䣬�����ʵ�ַ������ʹ���ϵͳͬ�ⲿ����֮�䱣�ֺ���ƥ��Ŀ��Ʒ����������Ľ��ܿ��ƹ��ɣ�����ɽ��[8]����Ť��ƥ�䷨�����÷�����ת�ٿ���ʵ����ȫҺѹ��������������Һѹ�õĺ���ƥ�䣻����ƽ��[9]���Һѹ�ھ����ҵ�����еĸ��ܺ����⣬����˷������붯��Һѹϵͳ����ƥ����ܿ��Ʋ����Լ�ʵ�ָò��Ե�ģ�������㷨�����Կ��������Ź��̻�е��ҵ�IJ��Ϸ�չ�������Ľ�������ŷ�����Խ��Խ�ܵ����ӣ����������Ĺ�������ֱ�ӹ�ϵ�ŷ�������Һѹϵͳ����ƥ����Ʋ��Ե��ƶ�������߷������Ķ����Ժ�ȼ�;����Ծ�����Ҫ����[10-13]��Ȼ�������еĹ���ƥ���о������ڷ�������Һѹ�õ�������ԣ���δ�����������ⲿ���ء���ˣ����������Ի���װ�ػ�Ϊ�о������������˶�ѧ������ѧ����ģ�ͷ��������Ĺ������ԣ���������Ӧ�Ķ����������Ϸ���ģ�ͣ�ģ��������ʻ�����е��ֵظ������ԣ��������۷�������̬�����ʵ����֤���ϵķ����������������»���װ�ػ�����Һѹϵͳ�Ķ�̬�������ԣ�Ϊ���������������Һѹϵͳ�Ĺ���ƥ���Ż��ṩ�ɿ����ݡ�
1 ����Һѹϵͳԭ��
ij�ͺŻ���װ�ػ���ѹ����ϵͳԭ����ͼ1��ʾ���������߱�����1��6Ϊͬ�ᴮ��ʽ���������ã�ͨ�������ȵ���a��b��c��d���Ʊ�����2��5�������������Ʊ����õ�������ʵ�ֻ���װ�ػ���ǰ�������ˡ�ת���ͣ����
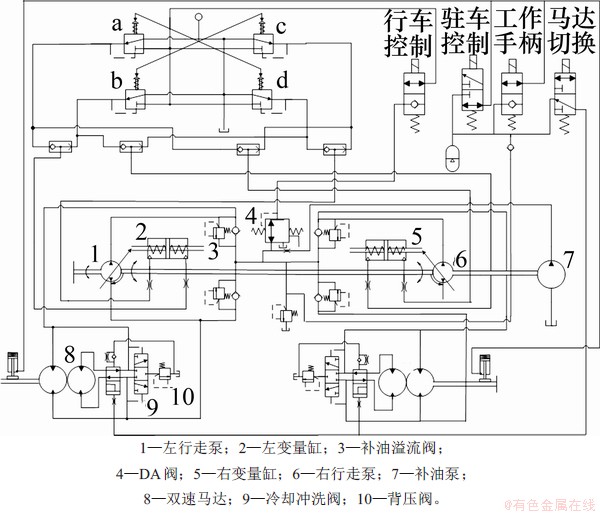
ͼ1������װ�ػ�Һѹ����ԭ��
Fig. 1��Hydraulic driving principle of skid-steer loader
����װ�ػ���ʻ�����У�����Һѹϵͳ��Ҫ�������������߿��ơ�פ���ƶ���˫�������л��Լ����͡����У�˫�������л�ָ������Բ�ͬ·��״̬������װ�ػ�������������������в�ͬ�����Ĺ���״̬���������ڸ���·����ʻʱ������8�л���������״̬����ʱ��������ת�ٽϵͣ����Ť�ؽϴ�������ƽ̹·����ʻʱ������8�л���С����״̬����ʱ��������ת�ٽϸߣ����Ť�ؽ�С��
����ϵͳ��Ҫ�ɲ��ͱ�7��DA��4��������������3��ɣ��书�ܳ���������Һѹϵͳ��ѹ�ಹ�͡�Ϊ������·�ṩ�㶨ѹ���Ŀ������⣬���ܸ��ݷ�������ʵʱת�٣��������߱����õ�������ʵ�ַ��������⸺�ص�ƥ����ơ�
2 ����ϵͳ�������۷���
Ϊ�˽�������������Һѹϵͳ���ʷ�������ģ�ͣ�����Ӧ�����¼��裺�����ھ��ȡ�ƽ����Ӳ�ʵ�������ʻ��������������Ӱ�죻ÿ���������ܵľ����غ���ͬ��ֻ���dz�����ֹʱ��̥�ľ�����Ρ�
2.1������ϵͳ�˶�ѧ
����װ�ػ���ʻ�������˶�ѧʾ��ͼ��ͼ2��ʾ������̥���˶�������1) ������ǰ������Ļ�ת���ƣ�2) �ش�ֱ��ǰ������IJ�����3) �������ӵ�������ĵ�
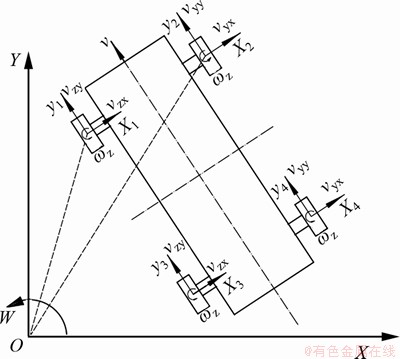
ͼ2������װ�ػ��˶�ѧ����
Fig. 2��Kinematics analysis of skid-steer loader
1) ������װ�ػ�ֱ����ʻʱ������ֻ��������ǰ������Ļ�ת���ƣ���ʱ�����ٶ�Ϊ��
2) ������װ�ػ�ת����ʻʱ������̥������
3) ������װ�ػ�ת����ʻʱ������̥������
����










2.2������ϵͳ����ѧ
�ڻ���װ�ػ���ʻ�����У�����������ƽ�ⷽ��Ϊ[14]

����

������װ�ػ�ֱ����ʻʱ���ڹ��������������£���������ֵ�������Ϊ
����



������װ�ػ�ת����ʻʱ��������ת������������̥Ħ��ƫת������ƫת������


����
����ӡ�����ⶨ����װ�ػ���ʻ��������̥�Ľӵ���״��ͼ3��ʾ[16-17]�������Ҳ�ͼΪ���ͼ��Ӱ���ֵķŴ�ͼ����ת����ʻʱ����̥�ӵ�������һ���Ħ��ƫת������Ϊ

��Ϊ

ʽ�У�




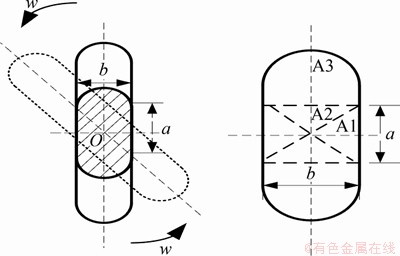
ͼ3����̥�ӵ���״ʾ��ͼ
Fig. 3��Schematic diagram of tire grounding shape
ת����ʻʱ����̥������


��

ʽ�У�





����


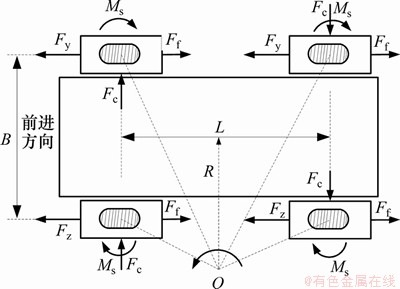
ͼ4����뾶ת��ʱ������������
Fig. 4��Force analysis of skid-steer loader during large radius steering
������װ�ػ�����С�뾶ת��(

��ʱ������װ�ػ�������ͼ5��ʾ���Ҳ����������ǰ����������������������෴����ʱ������װ�ػ�����������̥�������ֱ�Ϊ
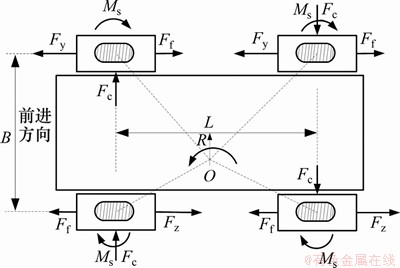
ͼ5��С�뾶ת��������������
Fig. 5��Force analysis of skid-steer loader during small radius steering
��ʽ(11)��(13)���Կ���������װ�ػ�ת����ʻ�����У�����ת��뾶�ļ�С��ת������ϵ����������������ת��������������
2.3����̥��������
��������ϵͳ�˶�ѧ������ѧ���۷������Եó���������װ�ػ�ֱ����ʻʱ����������ֵ���������Ϊ

ʽ�У�

��������뾶��ת��ʱ����������ֵ���������Ϊ

������С�뾶��ת��ʱ����������ֵ���������Ϊ

��ʽ(16)��(17)���Կ�����С�뾶ת���£�����װ�ػ���������������ʼ��Ϊ����������ת��뾶�ļ�С��������������뾶ת���£�����װ�ػ�������������Ϊ�����ڲ������������������������ϵ��


3 ���������ʵ���о�
3.1���������
����װ�ػ�����ϵͳ�ɷ���������ѹ����ϵͳ��Һѹ����ϵͳ�������������߸���5������ɣ����漰Һѹ�����ơ���̥������ѧ�ȵĶ����������ϵͳ�������Ķ��嶯��ѧģ�ͻ�AMESimģ�Ͳ���ȷ��������ʵ�ʵĹ�����������[18-19]����ˣ���������Virtual Lab Motion���嶯��ѧ������AMESim�����������Ϸ��棬������װ�ػ�Һѹ����ϵͳ����������ϵ������ȷģ��������ʻ�����еĹ������ԡ����Ϸ���ʱ������������Һѹϵͳ���Ϸ���ģ����ͼ6��ʾ��
�ڶ�����ҺѹϵͳAMESim����ģ���и�Ԫ��������������ʱ����Ҫ���ݻ���װ�ػ�����ϵͳʵ�ʽṹ������ֵ�����趨����ֱ�֤ģ�͵�ȷ�ԡ��Ի���װ�ػ����ж��嶯��ѧ��ģʱ����Ҫ������������������λ�ã�����ʵ�ʳߴ硢���϶��������н�ģ��ͬʱ�����ڲ��ķ�������Һѹ����ȫ�������趨Ϊ�����غɣ���֤��������������λ�õ�ȷ�ԡ�
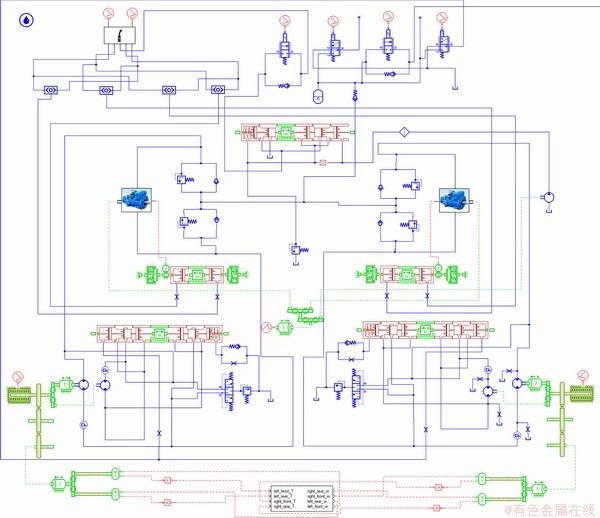
ͼ6������ϵͳ���Ϸ���ģ��
Fig. 6��Traveling system model in co-simulation
����ģ�⻬��װ�ػ�ֱ����ʻ��������������Ϊ����װ�ػ�����1.2 t�����������ڶת��״̬(2 400 r/min)��ǰ���ȵ��������Ծ�źţ������õ��������ٴﵽ�����һ��ʱ����ȵ���λ�ƽ�ԾΪ0��ģ������������������ֱ����ʻ���ƶ�ȫ���̣�����������ͼ7��ʾ��
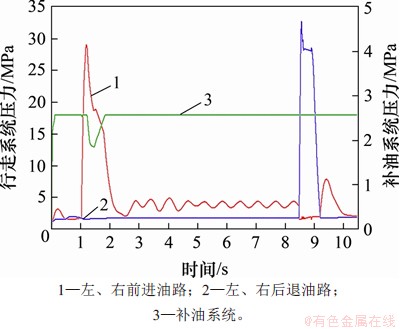
ͼ7��ֱ����ʻϵͳѹ����������
Fig. 7��Pressure simulation curve of straight driving
3.2��ʵ���о�
���ݻ���װ�ػ�����Һѹϵͳ��ʵ���������װѹ�����������Բ�����ʽ����Һѹϵͳ�и����ѹ���źš��������������������ѹ���ͽ����ڡ������������߱ñ��������ס����ͱó��ڡ�ʵ��������㲼����ͼ8��ʾ�����У�P1Ϊ�Ҳ����߱�����ǰ����·ѹ����㣬P2Ϊ�Ҳ����߱����ú�����·ѹ����㣬P3Ϊ������߱����ú�����·ѹ����㣬P4Ϊ������߱�����ǰ����·ѹ����㣬P5Ϊ���ͱó���ѹ����㣬P6Ϊ������߱�����ǰ����·������������ѹ����㣬P8Ϊ�Ҳ����߱�����ǰ����·������������ѹ����㣬P9Ϊ�Ҳ����߱����ú�����·������������ѹ����㣬P10Ϊ������߱����ú�����·������������ѹ����㡣ʵ������ͼ9��ʾ��
������ʵ�����Ա����1��ʾ���ӱ�1���Կ�����������ʵ���ֱ����ʻ���������кܸߵ������ԣ����ھ������ֵ����һ�����죺ʵ�������ϵͳ����ѹ����ֵ��ǰ����������·ѹ����ȷ������ĵ͡���Ҫԭ����Ŀǰ���̻�е��ҵ��̥ȱ�����ұ���û�б�Ҫ�ij������飬���·������漰����̥����նȡ���ƫ�նȵȲ����ο�������ҵ���������ʵ��������ڲ��졣
�ܵ���˵�������������������ʵ���ֱ����ʻ��������������ʵ�������и߶�һ���ԣ�����ģ��ȷ�ɿ���
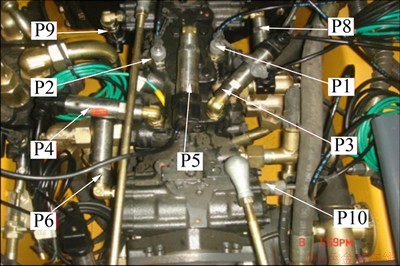
ͼ8������Һѹϵͳ��������װ����ͼ
Fig. 8��Sensor installation of traveling hydraulic system
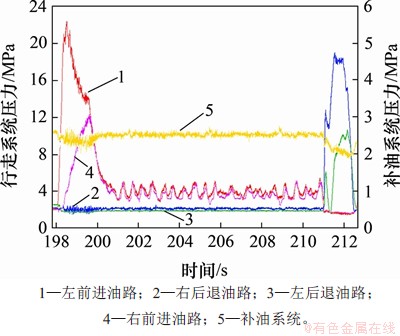
ͼ9��ֱ����ʻ����ϵͳѹ��ʵ������
Fig. 9��Traveling system pressure experimental curve of straight driving
��1��ֱ����ʻ�����·�����ʵ�����Ա�
Table 1��Comparison of simulation and experimental results of straight driving

4 �������Է���
4.1��ֱ����ʻ
����ģ�⻬��װ�ػ�ֱ����ʻʱ�����Ĺ������ԣ���������ͬ�ϣ�����������ͼ10��ʾ��
��ͼ10���Կ���������װ�ػ������Σ��������ﵽ��������58 kW���������߱����õ������Ϊ24.4 kW��������ʻ�Σ�������ƽ���������ԶС�������ʣ�Ϊ16.8 kW��������������ϵͳƽ���������Ϊ4.16 kW������ϵͳ���������1.83 kW������ϵͳ�������Ϊ0.62 kW���ƶ��Σ������������߱����õ��϶����÷�����ת�����·�������������������Ϊ��ֵ��
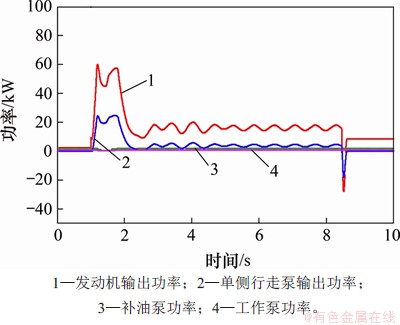
ͼ10��ֱ����ʻҺѹϵͳ��������
Fig. 10��Power characteristics of traveling hydraulic system for straight driving
4.2������ת��
����ģ�⻬��װ�ػ�����ת��ʱ�����Ĺ������ԣ���������Ϊ����װ�ػ����أ����������ڶת��״̬(2 400 r/min)������������ͼ11��ʾ���������ȶ��������33.5 kW��������߱������������25.2 kW������ϵͳ�������1.83 kW������ϵͳ�������0.6 kW����������Ϊ0.25 kW��
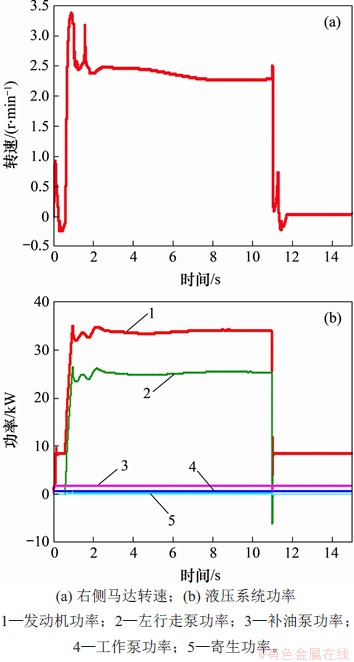
ͼ11������ת������Һѹϵͳ����
Fig. 11��Traveling hydraulic system characteristics of unilateral steering
��ͼ11(a)���Կ�����������װ�ػ�����ת��ʱ��ת���ڲ���������й¶������ǰ�����Ĺ��̣���ʱ�ڲ�ֱ��������ڲ�������϶����ã��������ѹ��Һ����Ӧ���������������������õġ���-���������ͬʱ�����������ʡ��������ʲ�����ԭ��Ϊ������ת���£�����װ�ػ�������ת��뾶��ͬ������ת��뾶��ת��Ϊ�����ܹ�Ϊ����ת���ṩ�����������ڲ��ת��뾶С����ת��Ϊ������ת������л����һ���ƶ������ƶ����복�������ٶȵij˻���Ϊ�������ʡ�
4.3��˫��ת��
����ģ�⻬��װ�ػ�˫��ת��ʱ�����Ĺ������ԣ���������Ϊ����װ�ػ����أ����������ڶת��״̬������������ͼ12��ʾ��
��ͼ12���Կ���������װ�ػ�˫��ת��ʱ���������ﵽ��������58 kW��������߱������������Ϊ26 kW���Ҳ����߱������������Ϊ23 kW���������߱����õ�ѹ��Ƚ��ȶ�������ϵͳ�������Ϊ1.83 kW���������������Ϊ0.62 kW�����Կ������ڻ���װ�ػ�����˫��ת������У����������˷���ת������������ͬ����������Ϊ�˻�ÿ��ء����ز�ͬ�������������õ���ʻ���ܣ�ͨ������װ�ػ����������������IJ����غϣ�����ת������д�����������
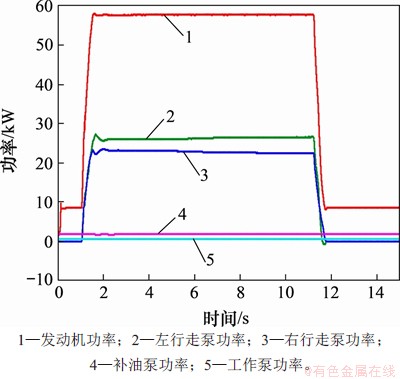
ͼ12��˫��ת������Һѹϵͳ����
Fig. 12��Traveling hydraulic system characteristics of bilateral steering
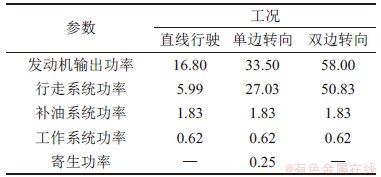
�ۺ����Ϸ�������������ij�ͺŻ���װ�ػ����ʷ������2��ʾ���ӱ�2���Կ������ڵ������£�����װ�ػ�����Һѹϵͳ�������������ת��뾶�ļ�С����������ϵͳ��Ҫ�˷���ת�������������ڵ���ת���£�ת���ڲ���ƶ����϶��ڲ�ֱ����ò�����ѹ��Һ����Ӧ������������ͬʱ����һ���ļ������ʣ��������۷������һ�¡�
��2��������������Һѹϵͳ�������
Table 2��Output power of traveling hydraulic system under typical working conditions kW
5 ����
1) �����˻���װ�ػ�����ϵͳ������������ģ�ͣ����۷����������������װ�ػ�������������ת��뾶�ļ�С������뾶ת���£�ת���ڲ�ֻ�����������ʡ�
2) ����AMESim������Virtual Lab Motion���嶯��ѧ���������˻���װ�ػ���Һ���Ϸ���ģ�ͣ���������ʵ��������������֤��ģ�͵���ȷ�ԡ�
3) ͨ���ɼ��������µķ������ݣ������˻���װ�ػ��Ĺ��ʷ����Լ�����Һѹϵͳ�Ĺ������ԣ�Ϊ�����װ�ػ���������Һѹϵͳ�Ĺ���ƥ���Ż��ṩ������������֧�š�
�ο����ף�
[1] ��ΰ. ����ת��װ�ػ���Ӧ���뷢չ[J]. ������е��, 2011, 32(9): 20-23.
LIU Wei. Application and development of skid-steer loader[J]. Construction Mechanization, 2011, 32(9): 20-23.
[2] ������. ����װ�ػ�Һѹϵͳ���ʶ�̬����[D]. ����: ���ִ�ѧ��е�뺽�պ��칤��ѧԺ, 2014: 1-2.
ZHANG Yongxiang. Dynamic analysis on power of skid steer loader hydraulic system[D]. Changchun: Jilin University. School of Mechanical Aerospace Engineering, 2014: 1-2.
[3] KIM H, OH K, KO K, et al. Modeling, validation and energy flow analysis of a wheel loader[J]. Journal of Mechanical Science and Technology, 2016, 30(2): 603-610.
[4] LEE H J, SUL S K, KWAK S Y, et al. System configuration and control strategy for compound type hybrid excavator with ultra capacitor[C]// The 2010 International Power Electronics Conference-ECCE ASIA, Sapporo, 2010: 820-826.
[5] CUI Hongwei, WEI Wei, YAN Qingdong. Software development of steady numerical computational method of matching between hydrodynamic torque converter and engine[J]. Advanced Materials Research, 2011, 199/200: 323-328.
[6] SUN Wei, MA Bing, MA Jin, et al. Dynamic matching analysis of engine and torque converter in tracked coach car[J]. Advanced Materials Research, 2014, 945/946/947/948/949: 314-318.
[7] ��٩, �Ծ�һ. ����ƽ�峵Һѹϵͳ�뷢��������ƥ���о�[J]. �й���е����, 2009, 20(6): 745-749.
LI Kan, ZHAO Jingyi. Research on hydraulic system and engine power matching for heavy transporter[J]. China Mechanical Engineering, 2009, 20(6): 745-749.
[8] ����ɽ, ���, ���, ��. ȫҺѹ��������������Һѹ��ƥ���о�[J]. ������е��, 2009, 30(12): 6, 49-52.
JIANG Youshan, ZOU Guangde, XU Gang, et al. Matching research of engine and hydraulic pump of full-hydraulic bulldozer[J]. Construction Mechanization, 2009, 30(12): 6, 49-52.
[9] ����ƽ, ���, �����, ��. Һѹ�ھ������ϵͳ����ƥ�估����ܿ���[J]. ��е����ѧ��, 2014, 50(5): 152-160.
YANG Shiping, YU Hao, LIU Jingang, et al. Research on power matching and energy saving control of power system in hydraulic excavator[J]. Journal of Mechanical Engineering, 2014, 50(5): 152-160.
[10] ������, Ҧ����, ����, ��. ZL50װ�ػ�Һѹ��е���ϴ�������ϵͳ�����о�[J]. ���������Ƽ���ѧѧ��(��Ȼ��ѧ��), 2015, 47(1): 141-146.
WANG Haifei, YAO Shuxin, KONG Yan, et al. Simulative research on hydraulic mechanical composite transmission energysaving system for ZL50 loader[J]. Journal of Xi'an University of Architecture & Technology(Natural Science Edition), 2015, 47(1): 141-146.
[11] ��־��, �Զ�ѡ, ������, ��. �����Զ����ٵĻ�϶���װ�ػ����Ʋ���[J]. ������ѧѧ��(��Ȼ��ѧ��), 2015, 36(4): 532-536.
ZHANG Zhiwen, ZHAO Dingxuan, LI Tianyu, et al. Control strategy based on automatic transmission for hybrid loader[J]. Journal of Northeastern University (Natural Science), 2015, 36(4): 532-536.
[12] ���ٻ�. Һѹ�ھ������ƥ�����ϵͳ�о�[J]. ������Һѹ, 2015, 43(10): 111-115.
LIU Ronghua. Research on the power matching control system for the hydraulic excavators[J]. Machine Tool & Hydraulics, 2015, 43(10): 111-115.
[13] �����, ������, ����, ��. �������뾲Һѹ������ƥ�������[J]. ��е����, 2010, 34(3): 64-67.
ZUO Delong, YIN Wenqing, HU Fei, et al. Match and simulation of engine and HST[J]. Journal of Mechanical Transmission, 2010, 34(3): 64-67.
[14] ������, ����, ����, ��. ����װ�ػ�ԭ��ת����ѧ����[J]. ������Һѹ, 2015, 43(8): 65-67.
FAN Yongchao, LIU Bo, LIU Xiang, et al. Dynamics analysis of pivot turning of skid-steer lorder[J]. Machine Tool & Hydraulics, 2015, 43(8): 65-67.
[15] ���dz�, �ƺ���. ��̥ʽ����װ�ػ�ת�������ط���[J]. ��ɽ��е, 2012, 40(8): 36-39.
GUO Yachao, HUANG Haidong. Analysis on steering resistance torque of wheeled skid loader[J]. Mining & Processing Equipment, 2012, 40(8): 36-39.
[16] FAUROUX J C, VASLIN P. Modeling, experimenting, and improving skid steering on a 6 �� 6 all-terrain mobile platform[J]. Journal of Field Robotics, 2010, 27(2): 107-126.
[17] FLIPPO D F, MILLER D P. Turning efficiency prediction for skid steering via single wheel testing[J]. Journal of Terramechanics, 2014, 52: 23-29.
[18] SUNG H P, KHAIRUL A, YOUNG M J, et al. Modeling and simulation of hydraulic system for a wheel loader using AMESim[C]// 2009 ICCAS-SICE. Fukuoka, 2009: 2991-2996.
[19] LIU Cui, TANG Zhiyong, ZHAO Xiaobao, et al. The modeling and simulation study of hydraulic intelligent power system based on AMESim[C]// Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference. Yantai, China: IEEE, 2014: 1530-1533.
(�༭ ����ƽ)
�ո����ڣ� 2019 -11 -14; �����ڣ� 2019 -12 -28
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51705189) (Project(51705189) supported by the National Natural Science Foundation of China)
ͨ�����ߣ��½��У���ʿ(��)�������ڣ��������崫��������о���E-mail:spreading@jlu.edu.cn
ժҪ��Ϊ�����װ�ػ���������Һѹϵͳ��̬����ƥ��ĺ����ԣ��о���������Һѹϵͳ�Ĺ������ԣ���ij�ͺŻ���װ�ػ�Ϊ��������������Һѹϵͳԭ�������������Ĺ��ʷ�������ģ�ͣ�����AMESim������Virtual Lab Motion���嶯��ѧ�������������Ķ���������Ϸ���ģ�ͣ������������»���װ�ػ�����Һѹϵͳ�Ĺ������ԣ���ͨ��ʵ����֤����ģ�͵�ȷ�ԡ��о��������������ת��뾶�ļ�С������װ�ػ�����ϵͳ���������������װ�ػ�ֱ����ʻʱ������ϵͳ���Ĺ��ʽ�С������ת��ʱ��ת���ڲ�ֻ�����������ʣ�˫��ת��ʱ������ϵͳ���Ĺ��ʽӽ�����������ʡ�
[1] ��ΰ. ����ת��װ�ػ���Ӧ���뷢չ[J]. ������е��, 2011, 32(9): 20-23.
[2] ������. ����װ�ػ�Һѹϵͳ���ʶ�̬����[D]. ����: ���ִ�ѧ��е�뺽�պ��칤��ѧԺ, 2014: 1-2.
[7] ��٩, �Ծ�һ. ����ƽ�峵Һѹϵͳ�뷢��������ƥ���о�[J]. �й���е����, 2009, 20(6): 745-749.
[8] ����ɽ, ���, ���, ��. ȫҺѹ��������������Һѹ��ƥ���о�[J]. ������е��, 2009, 30(12): 6, 49-52.
[9] ����ƽ, ���, �����, ��. Һѹ�ھ������ϵͳ����ƥ�估����ܿ���[J]. ��е����ѧ��, 2014, 50(5): 152-160.
[12] ���ٻ�. Һѹ�ھ������ƥ�����ϵͳ�о�[J]. ������Һѹ, 2015, 43(10): 111-115.
[13] �����, ������, ����, ��. �������뾲Һѹ������ƥ�������[J]. ��е����, 2010, 34(3): 64-67.
[14] ������, ����, ����, ��. ����װ�ػ�ԭ��ת����ѧ����[J]. ������Һѹ, 2015, 43(8): 65-67.
[15] ���dz�, �ƺ���. ��̥ʽ����װ�ػ�ת�������ط���[J]. ��ɽ��е, 2012, 40(8): 36-39.
