
DOI�� 10.11817/j.issn.1672-7207.2020.05.006
���������ά����ƽ���˶�ƽ̨��������
����,�ܺ���,������,��־ƽ,�μ���
�����ϴ�ѧ �����ܸ�����������ص�ʵ���ң����� ��ɳ��410083��
ժ Ҫ��
�ɶ��ۼӶ��ɵĶ����ɶ�ƽ̨��������ۻ���������ߵľ����ԣ����һ�ֻ���ֱ�ߵ��������X-Y��άƽ���˶�ƽ̨������1���������õ�ֱ����н���ƽ���˶����ʵ�ֶ�άƽ���˶�;����ֱ�ߵ������ѧģ�ͣ��Ƶ�ƽ̨�Ļ�������ģ�ͣ�����ƽ̨�ķ��������������һ�־��з���������ǰ��������PI���������о������������ȫ�г�(<19 mm)�˶������У�ƽ̨��ʵ��ƽ���˶���ͬʱ���ﵽ�����˶��г̺������˶����ȣ���֤��ƽ̨�Ŀɿ��ԺͿ���������Ч�ԡ�
�ؼ���:���ӷ�װ����ά����ƽ̨��ǰ������
��ͼ�����:TM921.5 ���ױ�־��:A
���±��:1672-7207��2020��05-1221-07
Design and control for electromagnetically driven two-dimensional precise plane motion platform
ZHANG��Wei, ZHOU��Haibo, HUANG��Zhenli, KONG��Zhiping, DUAN��Ji��an
(State Key Laboratory of High-Performance Complex Manufacturing, Central South University,Changsha 410083,China)
Abstract: In view of the limitation of multi-degree-of-freedom platform formed by the accumulation of multiple single-degree-of-freedom platforms,an X-Y two-dimensional planar motion platform driven by linear motor was proposed. A pair of orthogonal linear bearings were used to decouple plane motion and realize two-dimensional plane motion. Based on the mechanical model of linear motor, the basic control model of the platform was derived.Based on the nonlinear resistance of the platform, a PI controller with nonlinear damping feedforward compensation was proposed. The results show that when the platform is in full travel (<19 mm) motion,it can realize the plane motion and achieve the design goal of centimeter-scale travel and submicron precision,which verifies the reliability of the platform and the effectiveness of the controller.
Key words: electronic packaging; two-dimensional precision platform; feedforward compensation
������������λϵͳ�ѹ㷺Ӧ���ڹ���ӷ�װ���������������ӹ��ȹ��̿�ѧ����[1]������Щ�����У����г̺߶�λ�����Ƕ�λϵͳ�Ĺؼ�����[2]���ر������Ÿ���������ͨ���Ĺ���������������ǶԹ�������ϵͳ�ľ���Ҫ��Խ��Խ��[3]��Ŀǰ��������������ϵͳ��Ҫ�ɶ�������ɶ�ƽ̨��϶��ɣ��������ɶ��˶�ƽ̨���Խ�����ʵ�������Ķ�λ���ȣ��������ӳ���������ɶ�ϵͳʱ�����ڴ���װ������������������ȣ����ƽ̨���Ա���ԭ�ж�λ���ȺͶ�λ����[4-5]�����⣬��ʵ��Ӧ���У��߾��Ȳ����ͼӹ�ƽ̨��������
1 ƽ���˶�ƽ̨�ṹ��ƺͷ���
1.1��ϵͳ�ṹ���
ϵͳ����ṹ��ͼ1��ʾ��ƽ̨����������½ṹ���ײ�Ϊ1���������õ�����ģ�顣����ģ������Ķ���ͨ��1���������õ�ֱ����д��ݵ���ƽ̨��ʵ��ƽ���˶�����դ����ͷ�ͱ�߹���ƽ̨�IJ���ϵͳ����ɼ�����Сλ��Ϊ0.1 
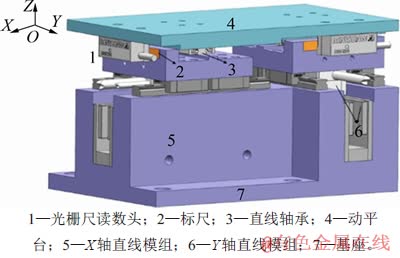
ͼ1����ά����ƽ���˶�ƽ̨����ṹʾ��ͼ
Fig. 1��Schematic diagram of overall structure of planar moving platform
ͼ2��ʾΪ��ƽ̨�Ľ���ԭ��ͼ������a������a����ֱ�����a������b�ͻ���b����ֱ�����b������a�ͻ���bͨ���ݶ��붯ƽ̨����ӣ�����a�̶���X��������ģ���ϣ�����b�̶���Y��������ģ���ϡ���ƽ̨��X�����˶�ʱ��X��������ģ�����ֱ�����a����ƽ̨��ֱ�����b�Ļ���b�˶���ͬ������ƽ̨��Y�����˶�ʱ��Y��������ģ�����ֱ�����b����ƽ̨��ֱ�����a�Ļ���a�˶���X(Y)��������ģ��ṹ��ͼ3��ʾ��ÿ����������ģ���������塢��Ȧ��ֱ���������֧�����õĻ�����ɡ�������̶��ڵ����ϣ�ֱ�������Ȧͨ����������ӡ�����Ȧͨ��ʱ�����ڴų����ܵ��������������ã����������ֱ�����a(b)�˶���
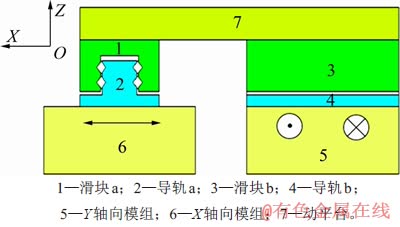
ͼ2������ԭ��ʾ��ͼ
Fig. 2��Schematic diagram of decoupling principle
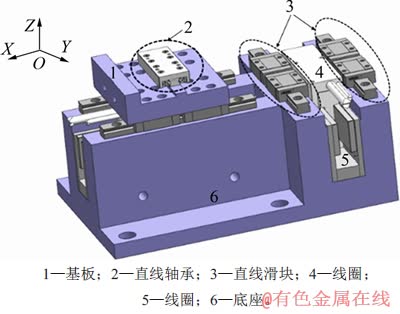
ͼ3������ģ��ṹʾ��ͼ
Fig. 3��Schematic diagram of drive module structure
1.2��ֱ�ߵ�����ӵĶ���ѧ����
ÿ��ֱ�ߵ��ͨ��������Ȧ�е��������Ƶ������������[16]֪������ֱ�ߵ�����˶�ƽ̨�ж��ӵĶ���ѧģ��Ϊ

����






��ʽ(1)���л��֣������������ĺ�������ʾ��άƽ���˶�����ϵͳ�ı��ض���

����













2 ���з���������ǰ����������PI���������
ƽ̨ʵ�ֵĶ�άƽ���˶���ʽ�ֱ�Ϊ��X��Y�����ƽ�ƣ���ˣ����ض���ƽ̨����2�������2��������ٶ�����ƽ̨��X��Y����ƽ�Ƶĵ����Ȧ�еĵ����ֱ�Ϊ

ʽ�У�








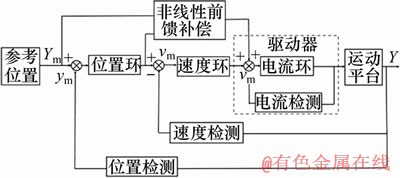
ͼ4������ϵͳʾ��ͼ
Fig. 4��Schematic diagram of control system
2.1��λ�û�������ٶȻ����
λ�û����ñ������ƣ���ѧ����ʽΪ

ʽ�У�








�ٶȻ�����PI���ƣ�����ѧ����ʽ���£�

ʽ�У�








2.2������������ǰ�����������
��ʽ(1)��֪���˶�ƽ̨������������Ҫ����Ħ�����Ͷ�λ�������У�
1) ��ȡ



����ʽ(6)�ɵ�
ʽ�У�

2) ��ȡ


���У�sgnΪ���ź�����Stribeck���������ٶ�������½��������ֵΪ��̬Ħ����




��ʽ(8)��֪

��������[14]����λ�����Ա�ʾΪ
����








����ʽ(1)����ƽ̨ʩ�ӵ���������Ϊ



����ʽ(9)��(11)��
ʽ�У�



3 ʵ����������
Ϊ����֤ƽ̨�ṹ�Ϳ���ϵͳ�����ܣ�����Matlab/Simulink�������Զ�άƽ���˶�ƽ̨����ʵ����ԡ�ʵ�����dsPACE���ֿ���ԭ��ϵͳ[17]����ϵͳ�Ŀ��ư�ΪDS1005��������ADC��DAC�ͱ������ӿڵ�·������������XL-80�������ϵͳ��Ϊ���������ߣ����⾫��Ϊ1 nm��
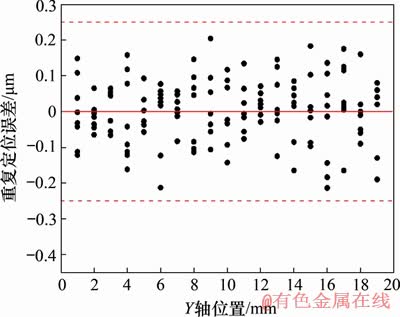
3.1���ظ��Զ�λʵ��
Ϊ����֤ƽ̨�˶���ͬһλ�õĿ��ظ��ԣ���ƽ̨�����ظ���λ���Ȳ��ԡ���ƽ̨���г̷�Χ�ڣ��������1 mmΪ���ȡ19��Ŀ��㣬ÿ��Ŀ���ɼ�8�����ݣ���ͬһĿ���ɼ�������ƽ��ֵΪ�ο�λ�ƣ�������ƽ̨�ڸ�Ŀ��λ�õ��ظ���λ���ȡ�ͼ5��ʾΪ��X���˶�������Ŀ���ʱ�����λ�������Է�����X��ȫ�г��˶�ʱ���ظ���λ���Ϊ��0.20
3.2��������Ӧ
Ϊ��˵����λ��ƽ̨�ĸ�����������ƽ̨��������Ӧ���в��ԡ���ƽ̨����Y���ƶ�100
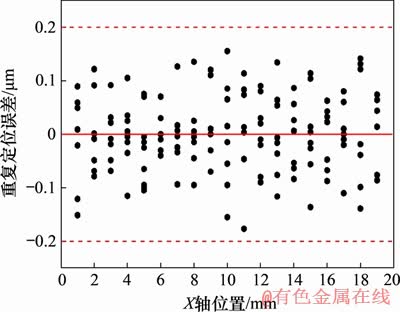
ͼ5��X���ظ���λ����
Fig. 5��Repeated positioning accuracy of X axis
ͼ6��Y���ظ���λ����
Fig. 6��Repeated positioning accuracy Y axis
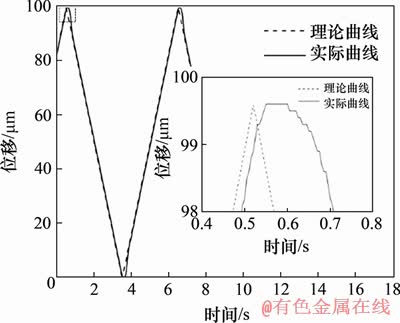
ͼ7��PI������������Ӧ����
Fig. 7��Triangle response curve of PI controller
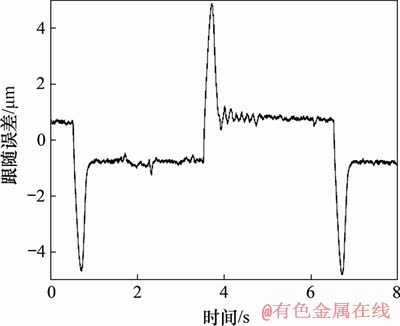
ͼ8��PI������������Ӧ�����������
Fig. 8��Triangular response follows error curve of PI controller
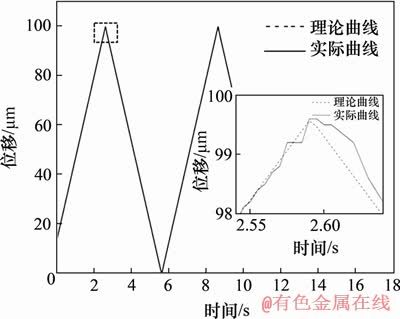
ͼ9��PI+ǰ��������������������Ӧ����
Fig. 9��Triangle response curve of PI and feedforward compensation controller
3.3���켣Բ
���ڸ�ƽ̨�ǽ�X��Y�˶�������ͬһƽ���ڣ��켣Բ���Լ����˶����ʽ�Ŀ����Ժ�ƽ̨���������ܣ�����X��Y�᷽��ĵ��ͬʱ�˶�����ͬһƽ���ڻ�1���뾶100
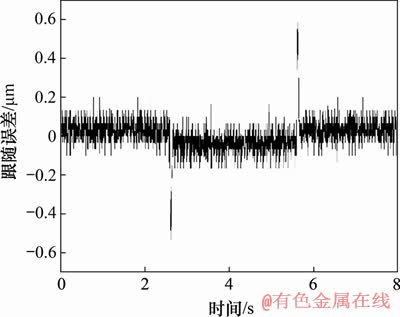
ͼ10��PI+ǰ�����������������������
Fig. 10��Error curve of PI and feedforward compensation controller
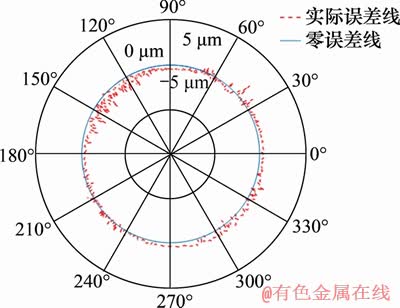
ͼ11���켣Բ
Fig. 11��Trajectory round
4 ����
1) ʹ��ֱ�ߵ��ֱ��������ƽ̨�������˶����ݲ���������ֱ����и��Խ��ʽ����С����ϵͳ���ӳ̶ȣ�ͬʱ��ϸ߷ֱ��ʵ�ֱ�߹�դ�ߣ���ƽ̨����ʵ��������άƽ���˶�ƽ̨��ơ�
2) ���ô�ͳPI��������ƽ̨���˶��������ı�ʱ��ƽ̨���ܺܺõؽ��б�����档����ֱ�ߵ������ԭ������ƾ��з���������ǰ��������PI��������ƽ̨�ĸ��澫������������ƽ̨����Ӧ�ٶ���ߡ�
�ο����ף�
[1] TAMADAZTE B, PIAT N F, MARCHAND E.A direct visual servoing scheme for automatic nanopositioning[J]. ASME Transactions on Mechatronics, 2012, 17(4): 728-736.
[2] DEVASIA S, ELEFTHERIOU E, MOHEIMANI S O R. A survey of control issues in nanopositioning[J]. IEEE Transactions on Control Systems Technology, 2007, 15(5): 802-823.
[3] ����, �μ���. ����ӷ�װ�������˶�ƽ̨ĩ����̬����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(5): 1290-1295.
YANG Bo, DUAN Jian. Opto-electronics packaging platform for ra-precision position and attitude adjustment[J]. Journal of Central South University(Science and Technology), 2011, 42(5): 1290-1295.
[4] LI Yangmin, XU Qingsong. A novel piezoactuated XY stage with parallel,decoupled, and stacked flexure structure for micro-/nanopositioning[J]. IEEE Transactions on Industrial Electronics, 2011, 58(8): 3601-3615.
[5] POLIT S, DONG Jingyan. Development of a high-bandwidth XY nanopositioning stage for high-rate micro-/nanomanufacturing[J]. ASME Transactions on Mechatronics, 2011, 16(4): 724-733.
[6] BRYAN J B, CARTER D L. Design of a new error-corrected co-ordinate measuring machine[J]. Precision Engineering, 1979, 1(3): 125-128.
[7] WANG H Y, FAN K C, YE J K, et al.A long-stroke nanopositioning control system of the coplanar stage[J]. ASME Transactions on Mechatronics, 2014, 19(1): 348-356.
[8] AWTAR S, PARMAR G. Design of a large range XY nanopositioning system[J]. Journal of Mechanisms and Robotics, 2013, 5(2): 21001-21008.
[9] ��֪��, ţ����, ��һȺ. 3-CRR�Ͳ��������˶�ѧ�������Է���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2017, 48(5): 1190-1197.
LIU Zhihui, NIU Junchuan, ZHOU Yiqun. Kinematics and singularity analysis of 3-CRR parallel mechanism[J]. Journal of Central South University(Science and Technology), 2017, 48(5): 1190-1197.
[10] MO Xixian, ZHANG Bo. Design and driving of a 3-DOF electromagnetic direct-drive nanopositioning stage with long stroke[C]//2017 IEEE International Conference on Manipulation,Manufacturing and Measurement on the Nanoscale(3M-NANO). Shanghai: IEEE, 2017: 236-241.
[11] GAO Wei, DEJIMA S, YANAI H, et al. A surface motor-driven planar motion stage integrated with an XY��Z surface encoder for precision positioning[J]. Precision Engineering, 2004, 28(3): 329-337.
[12] CHEN M Y, HUANG H H, HUNG S K.A new design of a submicropositioner utilizing electromagnetic actuators and flexure mechanism[J]. IEEE Transactions on Industrial Electronics, 2010, 57(1): 96-106.
[13] LEI Jin, LUO Xin, CHEN Xuedong, et al.Modeling and analysis of a 3-DOF Lorentz-force-driven planar motion stage for nanopositioning[J]. Mechatronics, 2010, 20(5): 553-565.
[14] ������, �ܺ���, �μ���, ��. һ�ֲ���ͬ�ͺŵ����Ϊ���ص�ֱ�ߵ�������������Է���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2017, 48(10): 2641-2648.
ZHOU Zhenyu, ZHOU Haibo, DUAN Jian, et al.Thrust fluctuation measurement of PMSLM by the same model motor of mutual load[J]. Journal of Central South University(Science and Technology), 2017, 48(10): 2641-2648.
[15] DU Haibo, CHEN Xiuping, WEN Guanghui, et al. Discrete-time fast terminal sliding mode control for permanent magnet linear motor[J]. IEEE Transactions on Industrial Electronics, 2018, 65(12): 9916-9927.
[16] VILLEGAS F J, HECKER R L, PENA M E, et al.Modeling of a linear motor feed drive including pre-rolling friction and aperiodic cogging and ripple[J]. The International Journal of Advanced Manufacturing Technology, 2014, 73(1/2/3/4): 267-277.
[17] ����, ������, �����. ����dSPACE������˫��ģPMSM���Ʒ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2015, 46(6): 2036-2043.
GAO Ya, LIU Weiguo, LUO Guangzhao. A new dual sliding mode PMSM control method based on dSPACE[J]. Journal of Central South University((Science and Technology), 2015, 46(6): 2036-2043.
���༭ �²ӻ���
�ո����ڣ� 2019 -11 -11; �����ڣ� 2020 -01 -12
������Ŀ(Foundation item)�������ص��з��ƻ���Ŀ(2017YFB1104800); ������Ȼ��ѧ����������Ŀ(51575534��51975590) (Project(2017YFB1104800) supported by the National Key R&D Program of China; Projects(51575534,51975590) supported by the National Natural Science Foundation of China)
ͨ�����ߣ��ܺ�������ʿ�����ڣ����»���ϵͳ��ơ���ģ������о���E-mail��zhouhaibo@csu.edu.cn
ժҪ:����ɶ�������ɶ��ۼӶ��ɵĶ����ɶ�ƽ̨��������ۻ���������ߵľ����ԣ����һ�ֻ���ֱ�ߵ��������X-Y��άƽ���˶�ƽ̨������1���������õ�ֱ����н���ƽ���˶����ʵ�ֶ�άƽ���˶�;����ֱ�ߵ������ѧģ�ͣ��Ƶ�ƽ̨�Ļ�������ģ�ͣ�����ƽ̨�ķ��������������һ�־��з���������ǰ��������PI���������о������������ȫ�г�(<19 mm)�˶������У�ƽ̨��ʵ��ƽ���˶���ͬʱ���ﵽ�����˶��г̺������˶����ȣ���֤��ƽ̨�Ŀɿ��ԺͿ���������Ч�ԡ�
