
DOI: 10.11817/j.issn.1672-7207.2016.03.030
���»��ҵ綯��еȡ����߷�Ťװ�����
������1, 2��TALALAY P G1, 2��֣�δ�1, 2�����1, 2����Ʒ³1, 2���ڴ��1, 2��������1, 2�����1, 2
(1. ���ִ�ѧ ���蹤��ѧԺ������ ������130026;
2. ���ִ�ѧ �����о����ģ����� ������130026)
ժ Ҫ��
��Ťװ�ý����Ż���ƣ���������ͷʵ��ȷ����Ťװ����Ʋ����������Ťװ�����ԭ������Ťװ����ѧ����ģ�ͣ����Բ�ͬ��ǻ���ʽ��Ťװ�ý������ۼ��㣬�ó��侶��ѹ����Ť�ع�ϵ���ߣ�ȷ����ѵķ�Ť������������ƾ��������˻����Ļ���ʽ��Ťװ�ã�������ṹԭ�����������ɸն��뾶��ѹ�����ۼ���ģ�ͣ�����4�ָնȵ��ɽ�����ѡ���о�������������øն�Ϊ19.61 N/mm �ĵ���ʱ������ʽ��Ťװ�������Ͽ��ṩ73~94 N��m��Ť�أ�������»����������Ҫ��
�ؼ��ʣ�
��Ťװ������ѧģ����Ť�������»��������
��ͼ����ţ�TB64��TU472.9 ���ױ�־�룺A ���±�ţ�1672-7207(2016)03-0946-07
Design of antitorque system of cable-suspended electromechanical drill for subglacial bedrock coring
FAN Xiaopeng1, 2, TALALAY P G1, 2, ZHENG Zhichuan1, 2, ZHANG Nan1, 2, CAO Pinlu1, 2,
YU Dahui1, 2, HU Zhengyi1, 2, YANG Cheng1, 2
(1. College of Constructional Engineering, Jilin University, Changchun 130026, China;
2. Polar Research Center, Jilin University, Changchun 130026, China)
Abstract: Antitorque system with high antitorque was optimized and redesigned. The antitorque system design principle was proposed and the mathematical model was built up for calculation of its main parameters. Through theoretical calculation for double tips skates antitorque system, the dependence of radial force on torque was investigated, and the parameters of double tips skates antitorque system to provide high antitorque were obtained. A new antitorque system with six-bar mechanism was designed. The mathematical model for calculation of radial force provided by spring was built, and four kinds of spring were optimized. The results show that skates antitorque system with 19.61 N/mm spring can hold the antitorque in rang of 73-94 N��m theoretically. And these parameters can meet the requirement of armored cable-suspended electromechanical subglacial bedrock core drilling.
Key words: antitorque system; mathematical model; torque; subglacial bedrock drilling
��ȡ�ϼ����¸ʲ����ɷ�ɽ�����������о��ϼ��������������γɣ�̽�������ɹŴ�½�ݻ���ʷ������Ҫ�Ŀ�ѧ����[1]��Ŀǰ����Ȼ��������������������ر��»��ң����ڱ�����������ȡ��������Ʒ[2-6]���������������Ϊ��߽ṹ���յ����ƶ�����ֹͣ�����ܺܺõ�Ӧ���ڼ��ر��»���������Ӳ��ȡ����̽�У���˱���������������»���ȡ����̽ϵͳ������װ���µ綯��е��������������ᡢЧ�ʸߡ��ܺ�С������ŵ��Ϊ��Ƶ���ѡ[7-8]������װ�������û�������ƽ�����������Ť�أ�����������Ϸ����ר�ŵķ�Ťװ�ã���װ�ñ�������㹻��ķ�Ť������ֹ�ϲ���ߵķ�ת����֤������������������̽�����Ť��ԶԶ���ڱ�����������Ť�أ�Ŀǰ���������еı�����߷�Ťװ�ò���������»����������Ҫ������������ṩ��Ť�صķ�Ťװ�þͳ�Ϊ��װ���±��»���������ƵĹؼ�������
1 ȷ����Ťװ����Ʋ���
��Ťװ����ƵĹؼ�����Ϊ�������ṩ�����Ť�أ�����Ť��ֵȡ���������õ���ͷ���͡�������װ���±����Ŀ���ǿ�Ⱦ����˱��»�����ߵ����ز���̫����ˣ����ṩ������ʯ��ͷ�������Ĵ���ѹ�����������ܹ���С��ѹ��ȡ�ø����Ч�ʵ���ͷ��
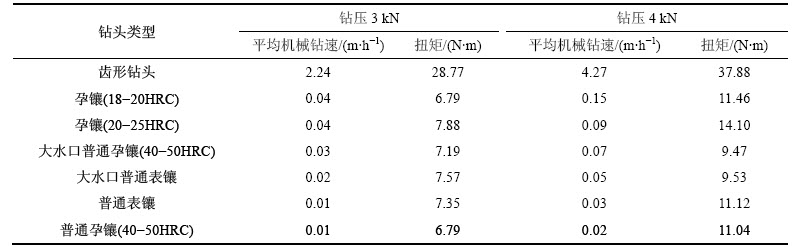
Ϊ�ˣ���Ի���������˶�������С��ѹ��ͷ������һ�������飬��1��ʾΪ����ͬת�����⾶59 mm�IJ�ͬ������ͷ�ڲ�ͬ��ѹ�µĻ�е���ٺ�Ť�ء������������ݵó��״���Ϊ���ε�������ʯ��ͷ���ɻ�ýϸߵ����Ч�ʣ�����ѹΪ3~4 kNʱ����е����Ϊ2.24~4.27 m/h�����Ť�ؽ���28.77~37.88 N��m֮�䣬����������������㼫���ֳ������Ҫ����ˣ�ȷ����֮���ķ�Ťװ�ñ����ܹ��ṩ��С��40 N��m�ķ�Ť�ء�
2 ��Ťװ�����
Ŀǰ��װ�������ʹ�õķ�Ťװ����Ҫ��4������(��ͼ1)���ֱ��ǰ��ʽ��˫ҶƬʽ������ʽ��ϳ��ʽ[10-14]��˫ҶƬʽ��ϳ��ʽ��Ťװ�ò��ܸ��ݿ��ڹ�����ʱ���ڷ�Ť�أ�����Ӧ�����׳��ֿ����¹ʣ����ʽ��Ťװ���ܰ�ɲ��ʺ��α�̶�Ӱ�죬�ṩ�ķ�Ť�ؽ�С��U�ΰ��ʽ��Ťװ����Ӧ���з��֣�U�ΰ���������������α䣬��ɷ�ŤʧЧ�����⣻��Զ��Ի���ʽ��Ťװ������һ������������ѹ����㣬�����ṩ�ϴ�ķ�Ť�أ����Ҹ�Ť�ص��ڷ��㡣���ѡ��ʽ��Ťװ��Ϊ�����ṩ��Ť�ط�Ťװ�����ͣ�����������Ż���ơ�
��1 С��ѹ��ͷ�Ļ�е���ٺ�Ť��[9]
Table 1 Penetration rate and torque of small drill load drill bits[9]
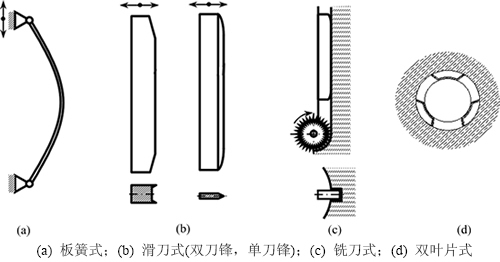
ͼ1 ��Ťװ������
Fig. 1 Different types of anti-torque system
2.1 ��Ťװ�����ۼ���
���ݷ�Ťװ�õĹ���ԭ�����������ױڵ�����ù��̿���ȷ����Ťװ����Ƶ�2������ԭ��1) ��Ťװ���ṩ�����Ť��Ӧ�ô������ת��������ʯ�����Ť�أ�2) ��Ťװ����ױڵ�Ħ����ӦС�������������ѹ֮���ʹ��������ʱ�����������䡣���ڷ�Ťװ�÷�Ť���Լ��ױ�Ħ�����IJ�����ȡ���ڷ�Ť����ױ�֮�侶��ѹ���������2������ԭ��ȷ���˻�����ױ�֮�侶��ѹ���������ޡ�ͼ2��ʾΪ������ױڽӴ�����������ͼ��

ͼ2 ������ױ��������������ͼ
Fig. 2 Schematic of forces application between skates and hole wall
2.1.1 ������ױھ���ѹ������
��������������α�Կױڲ�������ѹ��Fr����ѹ��ʹ��������ѹ��ױڱ���һ�����h��
 (1)
(1)
ʽ�У���Ϊ����ѹ��Ӳ�ȣ�Pa��sΪ������ױڵĽӴ������m2��
������ױڵĽӴ����Ϊ��
s=2hltan�� (2)
ʽ�У�hΪ��������ױڵ���ȣ�m��lΪ������ױڽӴ����ֵij��ȣ�m����Ϊ������ǣ�(��)��
��ʽ(1)��(2)�ɵ�
 (3)
(3)
�������ھ���ѹ��Fr������ѹ��ױ����Ϊhʱ�������ܲ��������Ť�ر�����������������Ť��M������
M��nFt(R+hcos��) (4)
ʽ�У�nΪ������������RΪ���װ뾶��m��������Ե��ױ�֮�������������FcΪ
Fc=2lhEs (5)
ʽ�У�EsΪ���㵥λ������鹦��MN/mm2��
����ʽ(3)~(5)�ɵû�����ױھ���ѹ��Ӧ������ʽ��
 ��
�� (6)
(6)
��Ϊ��ʵ���꾮�� ���� R��ʽ(6)�ɼ�Ϊ
���� R��ʽ(6)�ɼ�Ϊ
�� (7)
(7)
����ʽ(7)������ʽ��Ťװ�����辶��������ȡ���ڻ�����ױڵĽӴ�����L������Ҫ�ɱ�Ӳ�ȦҺ͵�λ���������Es)������BOGORODSKY��[15]�����ѹ��Ӳ�ȿɰ��ձ����Όѹǿ�ȵ�3�����㣬������Ϊ-3 ��ʱ�����Όѹǿ��Ϊ11.5 MPa����ˣ�ȡ��=34.5 MPa��UEDA��[16]�Ա����������ʵ��������ڱ���Ϊ-3 ��ʱ�����ĵ�λ������鹦EsΪ5 MN/mm2��ȡ�������û�������n=3�����װ뾶Ϊ67 mm����������������ʽ(7)�ɵã�
�� (8)
(8)
2.1.2 ������ױھ���ѹ������
Ϊ�˱�֤����������ʱ���������»���ͬʱ�ܹ���������������ѹ��Ҫ�����������������������ʽ��
G(1-kp)��pWOB+ f (9)
ʽ�У�GΪ������أ�N��kpΪж��ϵ��(���Һ�������ױ�������������ص�Ӱ��)��pWOBΪ�Ҳ����������ѹ��N��fΪ������Ťװ����ױڲ�����Ħ������N��
����ͼ2������������Ťװ����ױڲ�����Ħ����������ʽ���㣺
 (10)
(10)
ʽ�У���Ϊ������ױ�֮���Ħ��������
�ۺ�ʽ(9)��(10)�ɵû�����ױھ���ѹ��������Ϊ
�� (11)
(11)
ȡ�������G=4 kN��kp=0.15��������ͷ����ȡ��ѹ3 kN��������ױ�֮��Ħ������ �������¶��йأ������¶�Խ�ͣ�Ħ������Խ�������¶�Ϊ-4 ��ʱ����=0.02[17]��������ȡֵ����ʽ(11)�ã�
�������¶��йأ������¶�Խ�ͣ�Ħ������Խ�������¶�Ϊ-4 ��ʱ����=0.02[17]��������ȡֵ����ʽ(11)�ã�
�� (12)
(12)
�������������������Ʋ�ͬ��ǻ�������ѹ���������ṩ��Ť�ع�ϵ����ͼ����ͼ3��ʾ����2���г��˲�ͬ��ǻ����������ľ���ѹ�����ޡ�
��ͼ3��֪������ļ��ֲ�ͬ���˫���滬��ʽ��Ťװ���ڲ����������ѹ��ʱ�Կ��ṩ40 N��m���ϵķ�Ť�أ�����������װ���±��»��ҵ綯��еȡ�����Ҫ����Ťװ�����ṩ��ͬ��Ť��ʱ���������Խ�����辶��ѹ��ҲԽ��
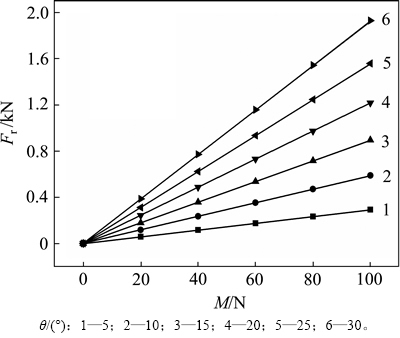
ͼ3 ��ͬ�Ƕ�˫��������ѹ����Ť�ع�ϵ����
Fig.3 Relationship between radial force and torque with different ��
��2 ��ͬ��ǦȻ����ľ���ѹ��Fr���ֵ
Table 2 Max value of Fr with different ��

2.2 ����ʽ��Ťװ�û�е���
�������ۼ�������֪����ͬ������ǻ������ṩ��ͬŤ��ʱ���Ƕ�Խ������ľ���ѹ��Խ�����ǻ������̫С��ǿ�Ⱥ��������ϵͣ����ѡ�ü��Ϊ20��Ļ���������ƣ���������ѡ��Ϊ350 mm����������������ʽ(8)��(10)�ɵü��Ϊ20��Ļ�����Ťװ�þ���ѹ�����»������뷴Ť�ع�ϵ��ʽΪ��
Fr=12.48M (13)
f=4.25M (14)
���ݹ�ʽ���㲢���Ƽ��Ϊ20��Ļ�����Ťװ�þ���ѹ�����»������뷴Ť�ع�ϵ����ͼ4��ʾ����ͼ4�ɿ��������÷�Ťװ�þ���ѹ���ﵽ���ֵʱ�����ṩ��Ť�شﵽ94 N��m����ʱ�»�����Ϊ399 N���������Ҫ��
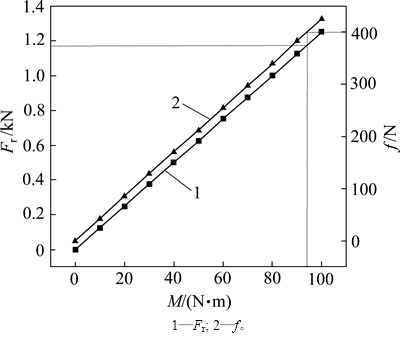
ͼ4 ���20�㻬������ѹ�����»�������Ť�ع�ϵ
Fig. 4 Relationship between radial force and friction and torque (angle of skate is 20��)
ͼ5��ʾΪ�����ɵķ�Ťװ�ýṹͼ��Ϊ�˱�֤����7�������˶��е�һ���ԣ��÷�Ťװ�û������Ϊ�����˻�����������֧��2�ͻ�����֧��4�̶������9�ϣ���������3���ڻ�����֧��2�ͻ�����֧��4�л��������������ĸ8ʱ����������3�����˶����Ӷ�ͨ��������֧��6��������5���������������ɵ�����ĸ8ʱ��������֧��6�ڵ���7���������´�������4�����ſ���
����������������3�����ɶ�����������á�Ϊ�����ӵ���7��ʹ��������ʹ��3��ͬ���ĵ�������֤�������ſ���ͬʱ���ɵ�ʹ�ÿ���ʹ�����Կ���������Ӧ�ԣ�������Ч��ֹ���ֿ����¹ʡ�
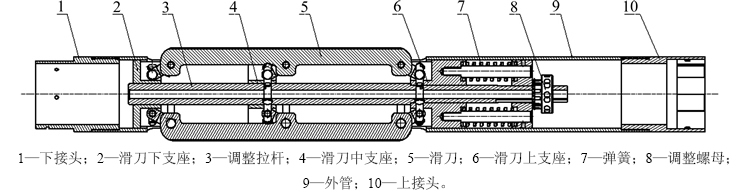
ͼ5 ����ʽ��Ťװ�ýṹͼ[18]
Fig. 5 Structure drawing of double tips skates antitorque system[18]
���ڻ�������ѹ����ʩ����ͨ�������α�����ģ����ɸնȵ�ѡ��Է�Ťװ�õ����ܾ��кܴ�Ӱ�죬����б�Ҫ�Ե����α��뾶��ѹ����ϵ���м��㡣���������ֲ���ͼ��ͼ6��
ͼ��BFΪ������������ױڽӴ�������ܵ������غ����ã������غɵĺ�����Ϊ����ѹ��Fr��
 (15)
(15)
ʽ�У�pΪ�����غɣ�N/m��lsΪ�������ȣ�m��
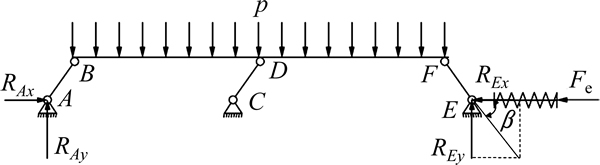
ͼ6 �����뵯����������ͼ
Fig. 6 Schematic of forces application between skate and spring
��AB��CD��EF�ֱ�Ϊ������3��֧�ˣ�֧��A��CΪ�̶�Լ����֧��E�����һ����������м��軬��Ϊ�����壬��CD��Ϊ��Լ��������Ի��������������á���A��E��������������ɵã�
 (16)
(16)
 (17)
(17)
ʽ�У�RAy��REy�ֱ�ΪA��E����y�᷽�������N��RAx��REx�ֱ�ΪA��E����x�᷽�������N�� Ϊ֧����x��нǣ�(��)��
Ϊ֧����x��нǣ�(��)��
E����x�᷽�����ɵ�����������λ����ˣ�
 (18)
(18)
 (19)
(19)
ʽ�У�FeΪ�����غɣ�N��kΪ���ɸնȣ�N/mm����hΪ�����α䣬m��
��ʽ(17)~(19)����(16)�ɵã�
 (20)
(20)
���ڻ�����������Ϊ�����˽ṹ����˵����ɷ����α�ʱ��Ҳ����֮�仯��ͼ7��ʾΪ����λ�ñ仯ʾ��ͼ��ͼ�У�ABCDEFΪ�����ſ����״̬λ�ã���ʱ���ɴ���ԭ��״̬��A��B��C��D��E��F��Ϊ��������λ�ã���ʱ����ѹ����ѹ������h= ��
��

ͼ7 �����ƶ�λ��ʾ��ͼ
Fig. 7 Schematic diagram of skate positions
����ͼ7���м��㣺
 (21)
(21)
������Ʋ�����֧��EF����Ϊ30 mm�����ɴ���ԭ��ʱ��=82�㣬����ֵ����ʽ(21)�ã�
 (22)
(22)
��ʽ(20)�������DZ任�ɵ�
 (23)
(23)
��ʽ(23)����ʽ(20)��
 (24)
(24)
�����⾶������ʽ���㣺
 (25)
(25)
ʽ�У�Dk Ϊ�����⾶��mm��l1ΪF�����뻬�����Ե���룬�������l1=25 mm��l2ΪE�����뷴Ťװ�������߾��룬l2=28 mm��
����ʽ(23)�仯�ã�
 (26)
(26)
��ʽ(26)����ز�������ʽ(25)�ã�
 (27)
(27)
��ʽ(27)����ʽ(24)�ɵã�
 (28)
(28)
ͨ��ʽ(28)�ɼ��㲻ͬ�նȵ��ɡ���ͬ�����⾶����»����Կױ��������ľ���ѹ������4�ֵ��ɸն������£��Ի����⾶�뾶��ѹ����ϵ���м��㣬���߹�ϵ������ͼ8��ʾ��
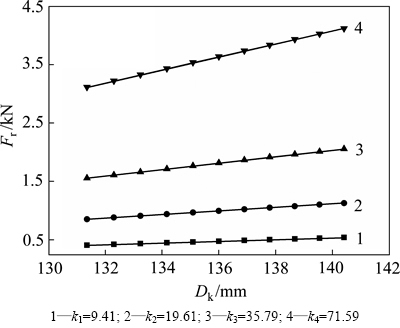
ͼ8 ��ͬ���ɸն��»����⾶Dk�뾶��ѹ��Fr��ϵ����
Fig. 8 Relationship between Dk and Fr in different springs
�������ϼ��ʲ����ɷ�ɽ����̽�У�������ֱ��Ϊ134 mm����ˣ�ͼ8����Ҫ�о��˻����⾶Ϊ131~141 mm��Χ�ڵ����ݣ���ͼ3�Աȿ��Կ������ն�Ϊk1�ĵ��ɣ������ľ�����������600 N�����ṩ��Ť����48 N��m���£����ն�Ϊk3��k4�ĵ��ɣ�������ԶԶ���ڻ���ʽ��Ťװ���������ķ�Χ��k2���ɲ����ľ���ѹ���Ƚ����У����ѡ��ն�Ϊk2�ĵ�����Ϊ����ʽ��Ťװ���õ��ɡ�
����ʽ(12)��(28)���㲢���Ʋ���k2���ɵ�20���ǻ���ʽ��Ťװ�ù������ߣ���Ͽ��;���ѹ��������ȷ���÷�Ťװ�õĹ���������ͼ9��ʾ��
��ͼ9���Կ�����������ѹ������������ֵʱ�������⾶���ɵ���142 mm�����ݸ÷�Ťװ�ÿ��Եֿ��ķ�Ť��Ϊ73~94 N��m��ԶԶ������ͷ�����Ҫ��Ť�أ�����������»�����߶Է�Ť�ص��������
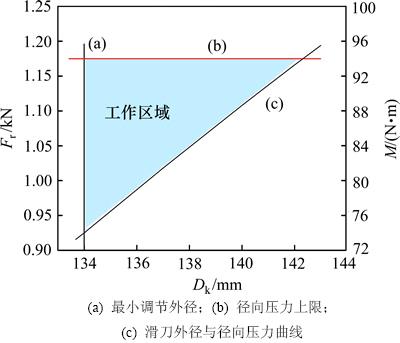
ͼ9 ����k2���ɵĻ���ʽ��Ťװ�ù�������
Fig. 9 Working area of 20�� skate antitorque system with k2 spring
3 ����
1) ������ͷʵ��ȷ����װ���±��»�����߷�Ťװ�����Ť��Ӧ����40 N��m��
2) ��������ʽ��Ťװ����ױ��������ѧģ�ͣ�ͨ������ó���ͬ��ǻ�����Ťװ�þ���ѹ����Ť�ع�ϵ��Ϊ����ʽ��Ťװ������ṩ�������ݡ�
3) �����һ�ֻ���ʽ��Ťװ�ã���������ṹԭ����4�ֵ��ɸնȲ����ľ���ѹ�����м��㣬��ѡ���ն�Ϊ19.61 N/mm�ĵ���Ϊ�÷�Ťװ����Ƶ���ѵ��ɡ���Ƶķ�Ťװ�ýṹ���٣������ɿ������ڲ�ж��ά�ޡ��������ۼ��㣬��Ť�ط�Χ�ɴ�73~94 N��m��������»�����̽��Ҫ��
4) Ϊ�˲�����Ƶķ�Ťװ�����ܣ�ͬʱ�������ۼ������ȷ�ԣ���һ��Ӧ��������̨������Ƶķ�Ťװ�ý���ʵ���о���
�ο����ף�
[1] ������, ������, ��Խ, ��. �ϼ���������ɽ�����ʼ�������ι���[J]. ����ѧ��, 2008, 29(3): 343-354.
HU Jianming, LIU Xiaochun, ZHAO Yue, et al. Advances in the study of the orogeny and structural deformation of Prydz tectonic belt in east Antarctica[J]. Acta Geoscientica Sinica, 2008, 29(3): 343-354
[2] BENTLEY C R, ROCI B R. Drilling to the beds of the Greenland and Antarctic ice sheets: a review[J]. Annals of Glaciology, 2007, 47: 1-9.
[3] WUMKES M A. Development of the U.S. deep coring ice drill[J]. Memoirs of National Institute of Polar Research, 1994, 49: 41-51.`
[4] ZAGORODNOV V, THOMPSON L G, GINOT P, et al. Intermediate depth ice coring of high altitude and polar glaciers with a light-weight drilling system[J]. Annals of Glaciology, 2005, 51(174): 491-501.
[5] UEDA H T. Byrd station drilling 1966-69[J]. Annals of Glaciology, 2007, 47: 24-27.
[6] TALALAY P G. Subglacial till and bedrock drilling[J]. Cold Regions Science and Technology, 2013, 86: 142-166.
[7] SHTURMAKOV A J, LEBAR D A, MASON W P, et al. A new 122 mm electromechanical drill for deep ice-sheet coring (DISC): 1. design concepts[J]. Annals of Glaciology, 2007, 47: 28-34.
[8] ������, ������������ά��, ��Ʒ³, ��. ����ֲ���ѭ���綯��е���꼼��[J]. ���ִ�ѧѧ��(�����ѧ��), 2012, 42(S3): 374-378.
HU Zhengyi, TALALAY P G, CAO Pinlu, et al. Investigations of near-bottom air reverse circulation in non-pipe electromechanical ice drill technology[J]. Journal of Jilin University (Earth Science Edition), 2012, 42(S3): 374-378.
[9] CAO Pinlu, TALALAY P G, ZHENG Zhichuan, et al. The diamond drilling bits test for sampling subglacial bedrocks in Antarctica[R]. Changchun: Jilin University. Polar Research Center, 2013: 5-10.
[10] KYNE J, MCCONNELL J. The prairiedog: a double-barrel coring drill for ��Hand�� augering[J]. Annals of Glaciology, 2007, 47: 99-100.
[11] YOSIO S. Light weight electro-mechanical drills[C]// HOLDSWORTH G. Proceedings of the Second International Workshop on Ice Drilling Technology. Calgary, 1984: 33-40.
[12] VASILIEV N I, TALALAY P G. Twenty years of drilling the deepest hole in ice[J]. Scientific Drilling, 2011(11): 41-45.
[13] YOSIO S. New counter-torque devices of a cable-suspended electromechanical drill[J]. Low Temperature Science, 1978, 37: 163-165
[14] ZAGORODNOV V, THOMPSON L G, MOSLEY-THOMPSON E. Portable system for intermediate-depth ice-core drilling[J]. Annals of Glaciology, 2000, 46: 167-172.
[15] BOGORODSKY V V, GAVRILO V P. Physical properties: modern methods of glaciology[M]. Leningrad: Gydrometeoizdat, 1980: 384.
[16] UEDA H T, KALAFUT J. Experiments on the cutting process in ice[R]. Hanover: USA CRREL Spec, 1989: 85.
[17] KIETZIG A M, HATZIKIRIAKOS S G, ENGLEZOS P. Physics of ice friction[J]. Journal of Applied Physics, 2010, 107(8): 081101-1-15.
[18] �ڳɷ�, ֣�δ�, TALALAY P G, ��. ����RecurDyn�ļ��ر��»���ȡ����߷�Ťװ�õ��˶����漰�˶�����[J]. ̽��: �������, 2013, 40(12): 21-24.
YU Chengfeng, ZHENG Zhichuan, TALALAY P G, et al. Motion simulation of antitorque device based on RecurDyn for coring tool used for sub-glacial bedrock in polar regions and the motion analysis[J]. Exploration Engineering: Rock & Solid Drilling and Tunneling, 2013, 40(12): 21-24.
(�༭ �Կ�)
�ո����ڣ�2015-04-13�������ڣ�2015-06-10
������Ŀ(Foundation item)�������ش���������豸����ר��(41327804) (Project(41327804) supported by the Major Research Equipment Development Project)
ͨ�����ߣ�֣�δ�����ʿ�������ڣ�������̽�豸�������о���E-mail: zhengzc@jlu.edu.cn
ժҪ�����ṩ��Ť�صķ�Ťװ�ý����Ż���ƣ���������ͷʵ��ȷ����Ťװ����Ʋ����������Ťװ�����ԭ������Ťװ����ѧ����ģ�ͣ����Բ�ͬ��ǻ���ʽ��Ťװ�ý������ۼ��㣬�ó��侶��ѹ����Ť�ع�ϵ���ߣ�ȷ����ѵķ�Ť������������ƾ��������˻����Ļ���ʽ��Ťװ�ã�������ṹԭ�����������ɸն��뾶��ѹ�����ۼ���ģ�ͣ�����4�ָնȵ��ɽ�����ѡ���о�������������øն�Ϊ19.61 N/mm �ĵ���ʱ������ʽ��Ťװ�������Ͽ��ṩ73~94 N��m��Ť�أ�������»����������Ҫ��
