
�Ǹ�˹�����µij���GPS�źŶ�λ�㷨
�������ӭ��
(���ϴ�ѧ ��Ϣ��������ѧԺ������ ��ɳ��410083)
ժ Ҫ��
ժ Ҫ����Գ���GPS��λ�㷨�п������˲����쳣�Ĺ۲������dz����У�����Ӱ�쳵��GPS��λ�ľ������⣬Ӧ��Bayes�����������۲�����������Ⱦ��̬�ֲ���Bayes�˲��㷨���о�������������˲��㷨�ܹ���Ч�������쳣�����Գ���GPS��λ�㷨��Ӱ�죻ʵ����������֤�˸��㷨����Ч�ԺͿɿ��ԡ�
�ؼ��ʣ�
�������˲����Ǹ�˹������Bayes����������GPS��λ��
��ͼ����ţ�TP301.6 ���ױ�־�룺A ���±�ţ�1672-7207(2010)04-1462-05
A Bayes filter algorithm with non-Gaussian noises based on
location of vehicular GPS
CHEN Yu-bo, SONG Ying-chun
(School of Info-Physics and Geomatics Engineering, Central South University, Changsha 410083, China)
Abstract: Based on the fact that the precision of location of vehicular GPS is significantly affected by the gross errors since Kalman filtering is very sensitive to them, a robust Bayesian estimator for the state parameters of one kind of dynamic models was given based on Bayesian theory with non-Gaussian noises. The results show that this Bayes filter algorithm can resist efficiently affection of abnormal noises. Example proves that the modified Kalman filter is effective and reliable.
Key words: Kalman filtering; non-Gaussian noises; Bayes estimation; location of vehicular GPS
�ڳ���GPS��̬��λ�У������ܶ�·��ЧӦ�������Ŷ���Ӱ�죬��������ƵƵ���������⣬����GPS;���ߴ�������ľʱ�����ź�����ϡ���ijһ��Ԫ��������1�����Ƿ���������Ҳ���ܼ�������ͬʱ��������(��ƶ���������)����̬�˲�ϵͳ������������Щ�ֲ�(����)��Ӱ�졣Ŀǰ�����ڴֲ����Ч��ʶ�����������������Ϻ�ʵ�ʹ����о�������һЩ��������Ե�ʵ�÷������翹��Kalman�˲���[1-3]������Ӧ�˲���[4-6]������Ӧ�����˲���[4, 7-8]�������춨�����۲ⷽ���еĴֲ�[9]����Դֲ������ӦKalman�˲���[10]�Լ��ֲ�̽������[11]��ʵ�������������Щ�����������ص����Ӧ��Ӧ�ó��ϣ�����δ���ǻ�����δ֪������������Ϣ��Ϊ�ˣ���������Ӧ��Bayes�����������۲�����������Ⱦ��̬�ֲ���Bayes�˲��㷨���Ա���Ч�������쳣�����Գ���GPS��λ�㷨��Ӱ�졣
1 ���������˲�
���ÿ������˲�������̬��λ���ݵ��˲�ģ�Ϳɸ���Ϊ��
![]() ��
��![]() (1)
(1)
���У�xkΪ״̬������zkΪ�۲�������![]() Ϊ״̬ת�ƾ���HkΪ�۲�ϵ������״̬����wk����������vk��ϵͳ�ij�ʼ״̬x0����������̬�ֲ������������Ӧ�Ŀ������˲���ʽΪ��
Ϊ״̬ת�ƾ���HkΪ�۲�ϵ������״̬����wk����������vk��ϵͳ�ij�ʼ״̬x0����������̬�ֲ������������Ӧ�Ŀ������˲���ʽΪ��
![]()
![]()
![]()
![]()
![]()
����![]() ��
��![]() ��
��![]() ��
��![]() ��
��![]() ��
��
���ǣ�ֻ�е�ϵͳ��״̬���̺����ⷽ�̵����б�������������̬�ֲ�������ʽ(1)�ĺ�����ϵΪ���Թ�ϵʱ���ɿ������˲���ʽ����õĹ���������Ч�ġ���ƫ�ģ���������С������ơ�Ϊ���������㣬����Ǻ�![]() ��ʾ��ֵΪ
��ʾ��ֵΪ![]() ������ΪP�Ķ�ά��̬�ֲ�����
������ΪP�Ķ�ά��̬�ֲ�����
![]()
![]() (2)
(2)
����[12] ��![]() �ǹ۲����ĸ�˹�ܶȷֲ�������
�ǹ۲����ĸ�˹�ܶȷֲ�������![]() ��״̬Ԥ��������˹�ܶȷֲ���������
��״̬Ԥ��������˹�ܶȷֲ���������
![]()
![]() (3)
(3)
����![]() ��
�� ![]() ��
��
2 �Ǹ�˹�����µ�Bayes�˲��㷨
��ʽ(1)��ʾ�����ⷽ���У���vk�ǷǸ�˹�������������һ��Ȩ��̬�ֲ�����αƽ�[13-15]����
![]() (4)
(4)
���ݶ�̬����ģ�͵�����֪ʶ����ʽ(4)��֪����xkʱ��zk�����������ֲ��ܶ�Ϊ��
![]() (5)
(5)
�����![]() ʱ��xk�����������ֲ��ܶ�
ʱ��xk�����������ֲ��ܶ�![]() �Լ�����
�Լ�����![]() ʱzk��Ԥ�������ܶȺ���
ʱzk��Ԥ�������ܶȺ���![]() ���ɵ�, ���˲���ʽΪ��
���ɵ�, ���˲���ʽΪ��
![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
![]() (9)
(9)
���У�![]() Ϊ���ۺ�������1����������������Ԫ��Ϊ
Ϊ���ۺ�������1����������������Ԫ��Ϊ
![]() (10)
(10)
![]() Ϊ���������Ԫ��Ϊ��
Ϊ���������Ԫ��Ϊ��
![]() (11)
(11)
���Կ�����![]() Ϊ���ۺ���
Ϊ���ۺ���![]() �ĵ�����
�ĵ�����
�������˲��㷨�У��ؼ���Ҫ����Ԥ��ĸ����ܶ�![]() ���������ȼ������
���������ȼ������![]() ʱxk�����������ֲ��ܶ�
ʱxk�����������ֲ��ܶ�![]() ����ʽ(5)��ͨ���������Եõ���
����ʽ(5)��ͨ���������Եõ���
![]()
![]() (12)
(12)
����![]() ��i=1, 2����
��i=1, 2����![]() ��
��![]() �����ǵ�
�����ǵ�![]() ����
����![]() ��ʽ(5)��(12)������û�еõ���kʱ�̲���ֵzkʱ�õ��ģ����õ�������ν��Ԥ�����̻�ʱ���������̡�����ʽ(10)~(12)������ã�
��ʽ(5)��(12)������û�еõ���kʱ�̲���ֵzkʱ�õ��ģ����õ�������ν��Ԥ�����̻�ʱ���������̡�����ʽ(10)~(12)������ã�
![]()
![]()
����
![]() ��
��
![]()
![]()
![]() ��
��
![]() ��
��
![]() ��
��
i=1, 2��![]() ��
��![]() (
(![]() )�ֱ�ΪZk��������������(��
)�ֱ�ΪZk��������������(��![]() )�ʹֲ�����(��
)�ʹֲ�����(��![]() )�ĺ�����ʡ�
)�ĺ�����ʡ�
3 ʵ���������
Ϊ����֤Bayes�˲��㷨��ʵ�ʽ����е�Ч��������һ�����GPS��̬ʵ�����ݣ�������2̨Trimble-4000SSE�ͽ��ջ���һ̨�̶��ڲο�վ����һ̨�����ڷɻ��ϡ�����10 min��ʼ�����ɻ���ɣ���������ʱ��ԼΪ90 min��Ϊ�˷����ͱȽ϶���Kalman�˲�����зɻ���ƽ���Ŷ�ʱ��״̬���Ƶ�Ӱ�죬�ø߾��ȵ��ز���λ˫�����Ϊ�ο�ֵ������C/A���˫��P����и����˲����㣬����������ο�ֵ���бȽϡ�Ϊ�˼��鿹����Ƶ�Ч����ÿ��500��Ԫ(���У���ԪΪʱ�䵥λ)��2��������Ϊ����30 m��λ�ֲ�˲�ģ�Ͳ��ó��ٶ�ģ�ͣ���λ�á��ٶȡ�C/A��P2��ij�ʼ����ֱ�ȡ0.2 m2��9��10-6 m2/s2��1 m2��1 m2���ٶȵ����ܶ�ȡ0.01 m2/s3��״̬ģ�ͷ���-Э������ֱ�Ӳ�������[7]�е�ģ�͡�
��Ϊ�����о����ص��ǷǸ�˹���������Σ����ֻѡ����һ�����ݽ�ƽ��(��������С)�����ݶΣ��ӵ�4 000��Ԫ��6 000��Ԫ���۲�ֵΪ3�����ϵ�λ�Ʋ��������ڲ�֪����Ⱦ�ʺ���Ⱦ�ֲ�����ز�����������Ⱦ��![]() ��
��![]() ����۲�ֵ����vk��Ⱦ��̬�ֲ�Ϊ��
����۲�ֵ����vk��Ⱦ��̬�ֲ�Ϊ��
![]()
���� ;
; ��
��
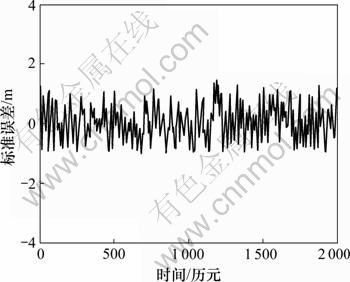
ͼ1~6��ʾΪ����Matalb��̽���Ľ����2���˲������ľ������(RMS)�ȽϽ������1��

ͼ1 ���������˲�X����ı����
Fig.1 Standard error of Kalman filtering in X direction

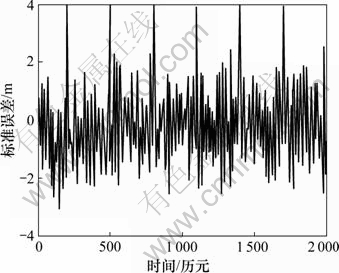
ͼ2 Bayes���˲�X����ı����
Fig.2 Standard error of Bayes filtering in X direction

ͼ3 ���������˲�Y����ı����
Fig.3 Standard error of Kalman filtering in Y direction
ͼ4 Bayes���˲�Y����ı����
Fig.4 Standard error of Bayes filtering in Y direction
ͼ5 ���������˲�Z����ı����
Fig.5 Standard error of Kalman filtering in Z direction

ͼ6 Bayes���˲�Z����ı����
Fig.6 Standard error of Bayes filtering in Z direction
��1 2���˲������ľ������(RMS)�Ƚ�
Table 1 RMS comparison of two filtering methods

��ͼ1��ͼ3��ͼ5���Կ�������X, Y��Z�������ڲ��������쳣�����ñ�Kalman�˲������ж�λ���㣬�нϴ��ƫ��ر���Z�����ƫ����� ���ԡ�
�Ƚ�ͼ1��ͼ2��ͼ3��ͼ4�Լ�ͼ5��ͼ6���Է��֣����Ѳ������������Ǵ�����Ⱦ��̬�ֲ��IJ�������ʱ�����ñ����ṩ��Bayes�˲������Ժܺõظ����˲������һЩ���ƫ���Ѿ���������
�ӱ�1���Կ����������ṩ��Bayes�˲������������ڱ�Kalman�˲������������������Ӧ�������˲���Bayes�˲�����Ҫȷ�����ʵĿ������Ӻ�Ȩ���ӡ�
4 ����
(1) Kalman�˲��㷨Ҫ����������Ǹ�˹������������GPS��̬��λ�۲�����ͨ���ǷǸ�˹�����������ؽ��ͳ���GPS��̬��λ�ľ��ȡ�
(2) ���۲������ǷǸ�˹����ʱ������GPS��̬��λ���ñ����ṩ��Bayes�˲��㷨��������Ч���Ƴ��ع۲������쳣��Ӱ�죬�Ӷ��õ����ߵĶ�λ���ȡ�
(3) ���ĸ�����״̬��������Ⱦ�ʺʹֲ��Э������֮��Ĺ�ϵ���ڿ�����Ƶ��о���һ�������� ���塣
�ο����ף�
[1] ��Ԫϲ. ��̬ϵͳ�Ŀ���Kalman�˲�[J]. ֣�ݲ��ѧԺѧ��, 1997, 14(2): 79-84.
YANG Yuan-xi. Robust Kalman filtering for dynamic system[J]. Journal of Zhengzhou Institute of Surveying and Mapping, 1997, 14(2): 79-84.
[2] �ܽ���. ������С���˷�[M]. �人: ����������ѧ������, 1997: 30-50.
ZHOU Jiang-wen. Robust least squares method[M]. Wuhan: Press of Huazhong University of Science and Technology, 1997: 30-50.
[3] Koch K R, Yang Y. Robust Kalman filter for rank deficient observation model[J]. Journal of Geodesy, 1998, 72(8): 436-441.
[4] Yang Y, He H, Xu G. Adaptively robust filtering for Kinematic geodetic positioning[J]. Journal of Geodesy, 2001, 75(2/3): 109-116.
[5] ��Ԫϲ, ��˫��. ���������е�ϵͳ����Э����������[J]. ���ѧ��, 2004, 33(3): 189-194.
YANG Yuan-xi, ZHANG Shuang-cheng. Fittings of systematic errors and covariance matrices in navigation[J]. Acta Geodaetica et Cartographica Sinica, 2004, 33(3): 189-194.
[6] ��Ԫϲ. ��̬��λ����Ӧ�˲��������[J]. ���ѧ��, 2003, 32(3): 189-192.
YANG Yuan-xi. Properties of the adaptive filtering for Kinematic positioning[J]. Acta Geodaetica et Cartographica Sinica, 2003, 32(3): 189-192.
[7] ��Ԫϲ, �κ���, �����. �۶�̬����Ӧ�˲�[J]. ���ѧ��, 2001, 30(4): 293-298.
YANG Yuan-xi, HE Hai-bo, XU Tian-he. Adaptive robust filtering for Kinematic GPS positioning[J]. Acta Geodaetica et Cartographica Sinica, 2001, 30(4): 293-298.
[8] YANG Yuan-xi, XU Tian-he, HE Hai-bo. On adaptively Kinematic filtering[C]//English Edition of Acta Geodetica et Cartographica Sinica. Beijing: Surveying and Mapping Press, 2001.
[9] ŷ����, ����, Ԭ�˱�. ����ӦѡȨ�˲�[C]//��ز����������ѧ��չ. �人: ��ѧ����������, 2004: 816-823.
Ou Ji-kun, CHAI Yan-ju, YUAN Yun-bin. Adaptive filtering for kinematic positioning by selection of the parameter weights[C]// Progress in Geodesy and Geodynamics. Wuhan: Science & Technology Press, 2004: 816-823.
[10] ������, �콨��. ���дֲ�۲�ֵ������Ӧ�˲�[J]. ���ͨ��, 2004(4): 19-21.
WANG Guo-fu, ZHU Jian-jun. Adaptive filtering under the observation contaminated the gross error[J]. Bulletin of Surveying and Mapping, 2004(4): 19-21.
[11] ��ӭ��, �콨��, ������. ��̬��λ�����в����ֲ��̽������[J]. ����ѧ, 2003, 31(5): 39-41.
SONG Ying-chun, ZHU Jian-jun, CHEN Zheng-yang. The detection and correction of gross error in observed value for Kalman filter[J]. Science of Surveying and Mapping, 2003, 31(5): 39-41.
[12] Fruhwirth R. Track fitting with non-Gaussian noise[J]. Computer Physics Communication, 1997, 100: 1-16.
[13] ���, Ф����. һ�ද̬ģ��״̬�������Ƚ���Ҷ˹����[J]. ����ͳ����Ӧ�ø���, 1995, 10(3): 35-42.
TIAN Zheng, XIAO Hua-yong. Robust Bayesian for the parameters of one kind of dynamic models[J]. Mathematical Statistics and Applied Probability, 1995, 10(3): 35-42.
[14] ��־��, ������. һ�ֶԳ�ƬҰֵ�����е�³���������˲�[J]. �廪��ѧѧ��: ��Ȼ��ѧ��, 1994, 34(1): 55-61.
DENG Zhi-dong, SUN Zeng-qi. Robust Kalman filtering insensitive to continuous outlier[J]. Journal of Tsinghua University: Science and Technology, 1994, 34(1): 55-61.
[15] ��־��, �콨��. ��Ⱦģ���µ����Ź���[J]. ���ѧ��, 1999, 28(1): 51-56.
WANG Zhi-jun, ZHU Jian-jun. Optimal estimation under contaminated error model[J]. Acta Geodaetica et Cartographica Sinica, 1999, 28(1): 51-56.
�ո����ڣ�2009-11-27�������ڣ�2010-04-29
������Ŀ��������Ȼ��ѧ����������Ŀ(40874005)�����ҽ�������ʿ�����������Ŀ(200805331086)�����ҽ�������ʿ�����������Ŀ(20090451489)
ͨ�����ߣ����(1966-)���У����������ˣ���ʿ�����³���GPS��λ��Ϣ�������о����绰��15308408228��E-mail: cyb@transfar.com
(�༭ �²ӻ�)
