
����ģ����������ͬ��������ٷ�����������
��˫��1���ż��1��������1������ǿ2
(1. �������´�ѧ ��Ϣ��ѧ����ѧԺ������ ������116026��
2. ����������ѧ ��������ѧԺ������ ������116024)
ժ Ҫ��
����������ķ����ԡ��������ǿ��ϵ��������ֱ��������Ӧģ��PI�����������ع�ģ������������ʸ��PI���ƻ������������ͬ���������Ӧģ��PI��������������Ƹ����л����Ե��Թ�ģ������������Ч�ؿ˷�����ͻ������Ŷ���Ӱ�죬���ϵͳ³���ԡ������ԣ���ʵ�ֿ��������������ߵ�������������������Ӧģ��PI�����������ڴ�ͳ��PI���ƣ�ͬʱ���ع�ģ���������ڹ̶��ṹģ�����ơ�
�ؼ��ʣ�
ģ��PI�������Թ�ģ���������л�����������ͬ�������
��ͼ����ţ�TP271+61 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-1032-05
Design and analysis of speed regulation of permanent magnet synchronous motor based on fuzzy logic
YU Shuang-he1, DU Jia-lu1, ZHOU Li-na1, YANG Zhen-qiang2
(1. School of Information Science and Technology, Dalian Maritime University, Dalian 116026, China;
2. School of Electrical Engineering, Dalian University of Technology, Dalian 116024, China)
Abstract: According to the nonlinear, multi-variable and strong coupled speed regulation problem of permanent magnet synchronous motor (PMSM), the adaptive fuzzy PI control and self-reconstructed fuzzy control were designed respectively. Based on the vector control of PMSM, the adaptive fuzzy PI control was firstly designed, and then the self-reconstructed fuzzy control with switching strategy was designed to overcome the parameter variation and load disturbance effectively. The proposed controllers can be adjusted online with improved robustness and fast response. Simulation results demonstrate that the proposed strategies are superior to the conventional PI control and fixed structure fuzzy control.
Key words: fuzzy PI control; self-reconstructed fuzzy control; switching strategy; PMSM
���Ž�����Ƶ�����ķ�չ������ͬ������ڻ����˺����ػ���������Ľ����ŷ�ϵͳ��Խ��Խ��ʾ����Խ�ԣ�����ߵĵ��پ��ȡ�����ĵ��ٷ�Χ�Լ��������Ӧ�ٶȵ�[1]��Ȼ������ͬ������������;��з����ԡ�ǿ����Ժ�ʱ���ԣ���֮ϵͳ����ʱ�����ܵ���ͬ�̶ȵ��ⲿ���ţ�ʹ�ó�����Ʋ��Ժ����������������ͬ������ŷ�ϵͳ�Ŀ���Ҫ��[2]��ʸ�����ƹ㷺Ӧ�õ�����ͬ������Ķ�λ����������У��ҹ㷺��������PI�㷨��ͨ�����Դﵽ����Ŀ���Ч ��[3]�����ſ������۵ķ�չ�����ܿ�����ģ�������������ʹ���ŷ��˶�ϵͳ����˸��õĿ����� ��[4-6]������ͬ������Ķ�̬�����ܵ��ڲ��������ر仯��Ӱ�죬���ѽ�����ȷ����ѧģ�͡���ģ��������Ʋ���Ҫ��ȷ����ѧģ�ͣ���˾��н�ǿ��³���ԣ��ܹ��ܺõؿ˷��ŷ�ϵͳ��ģ�Ͳ����仯�ͷ����ԵȲ�ȷ�����ء���ģ������Ӧ��������ʵ�����ߵ����������ܻ�����õĿ���Ч�������Ľ�������ͬ�����ʸ�����ƵĻ�������������Ӧģ�����ƣ������������ع����л����ԣ����봫ͳʸ�����ƺ̶��ṹ��ģ�����ƽ��бȽϣ�����ʾ������Ӧ�ԡ������ź�³���Եȿ���Ʒ�ʵĸ��ơ�
1 ����ͬ���������ѧģ��
�ں���������ĺʹ�·���͡��������������ڿռ�ԳƷֲ�����϶�ų��ʹ����ڿռ�Ϊ���ҷֲ�����£�����ͬ���������ϵͳ��ѧģ�Ϳɱ�ʾ���¡�
(1) ��ѹ����
![]() (1)
(1)
![]() (2)
(2)
(2) ��������
![]() (3)
(3)
![]() (4)
(4)
(3) ת�ط���
![]() (5)
(5)
(4) ��е�˶�����
![]() (6)
(6)
ʽ�У�ud��uqΪ���ӵ�ѹd-q�������id��iqΪ���ӵ���d-q�������Ld��Lq��d-q���ԸУ���d�ͦ�qΪ���Ӵ���d-q���������fΪת������������Ĵ�����RsΪ���ӵ��裻T eΪ������ת�أ�TL�Ǹ���ת�أ���mΪת�ӽ��ٶȣ�p�Ǽ���������=P��mΪת�ӵ���ٶȣ�JΪת��������BΪĦ����������ʽ(6)�ɿ���������ͬ�������ѧģ���Ƕ�����������Եģ����ж��ӵ�������id��iq�Լ���е���ٶȦ�m�ij˻���
2 ����Ӧģ��PI����
������ͬ�����ʸ��PI���Ƶ���ϵͳ�Ļ����ϣ�����������ͬ���������Ӧģ��PI����ϵ��ϵͳ�����ٶȻ��͵�����˫�ջ����ƣ�����������PI���������ٶȻ���������Ӧģ��PI����������ת�����e����仯��![]() ��Ϊ�����������PI�����ı仯��
��Ϊ�����������PI�����ı仯��![]() ��
��![]() Ϊ�����������������������������ҳ�PI 2������kp��ki��e��
Ϊ�����������������������������ҳ�PI 2������kp��ki��e��![]() ֮��Ĺ�ϵ������ģ���������k p1��k i1��ģ�����������������ӡ�ת�ٵ����e����仯��
֮��Ĺ�ϵ������ģ���������k p1��k i1��ģ�����������������ӡ�ת�ٵ����e����仯��![]() �Լ����
�Լ����![]() ��
��![]() �ı仯��Χ������Ϊģ�����ϵ�Ŀ������
�ı仯��Χ������Ϊģ�����ϵ�Ŀ������
e, ![]() ={-6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6};
={-6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6};![]() ��
��![]() ={-7, -6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6, 7}��
={-7, -6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6, 7}��![]() ��
��![]() ��e��
��e��![]() ģ���Ӽ�Ϊ{NB, NM, NS, ZO, PS, PM, PB},���Ӽ�Ԫ�طֱ���������С���С���㡢��С�����С�����e����ʵ����Ϊ[-1 500, 1 500]����������������k p1=6/1 500����
ģ���Ӽ�Ϊ{NB, NM, NS, ZO, PS, PM, PB},���Ӽ�Ԫ�طֱ���������С���С���㡢��С�����С�����e����ʵ����Ϊ[-1 500, 1 500]����������������k p1=6/1 500����![]() ����ʵ����Ϊ [-10 000, 10 000]������������k i1=6/10 000��
����ʵ����Ϊ [-10 000, 10 000]������������k i1=6/10 000��![]() ��
��![]() ��e��
��e��![]() �����������������������߷ֲ����ɴ˿ɼ������ģ���Ӽ��������ȣ�����ģ����������PI 2��������������������
�����������������������߷ֲ����ɴ˿ɼ������ģ���Ӽ��������ȣ�����ģ����������PI 2��������������������
3 �Թ�ģ������
���Թ�ģ������ϵͳ�У�ģ�������ֵ�ģ���������������ʽ��
Rj��if x1 is ![]() and
and![]() xn is
xn is ![]() then y is Sj
then y is Sj
���У�RjΪ��j��ģ������xi��y�ֱ�Ϊ��������������nΪ�ⲿ��������ĸ���![]() Ϊ��j�������ģ�����ϣ�SjΪ��ģ��ϵͳ�������
Ϊ��j�������ģ�����ϣ�SjΪ��ģ��ϵͳ�������
![]() (7)
(7)
![]() (8)
(8)
![]() (9)
(9)
ʽ�У�xiΪ���������x1=e (�ٶ�����ź�)��x2=![]() (�ٶ����仯��)����ji��mji�ֱ�Ϊ�����Ⱥ��������������xi����Ӧ�ĵ�j����˹�����ı���;�ֵ��
(�ٶ����仯��)����ji��mji�ֱ�Ϊ�����Ⱥ��������������xi����Ӧ�ĵ�j����˹�����ı���;�ֵ��
�Թ�ģ�����Ƶ�ѧϰ���̰���2�ࣺ��1���ǽṹѧϰ���ṹѧϰ��ʹ��2��Ѱ�ҵ����ʵ�������������ʹ���������������Ŀ���٣���2���Dz���ѧϰ�����ڷ�����������������������������Ȩֵ�����������Ⱥ����IJ���ֵ����ʹ������������������ﵽ��С��
3.1 �ṹѧϰ
�ڽṹѧϰ�����У�����Ҫȷ���Ƿ���Ҫִ�нṹѧϰ����emin��|e|����![]() ��|
��|![]() |�������emin��
|�������emin��![]() ΪԤ�����ֵ���������������������Ҫִ�нṹѧϰ����һ�������Ƿ�Ҫ����������������ֱ������µ��������������ڹ����������һ���µ�������������ζ��������һ���µ�ģ��������ʱ��������������������ɶ�Ӧ�������ź������������Ⱥ��ij̶ȡ�����������������������ǿ�Ȳ���������
ΪԤ�����ֵ���������������������Ҫִ�нṹѧϰ����һ�������Ƿ�Ҫ����������������ֱ������µ��������������ڹ����������һ���µ�������������ζ��������һ���µ�ģ��������ʱ��������������������ɶ�Ӧ�������ź������������Ⱥ��ij̶ȡ�����������������������ǿ�Ȳ���������
![]() j=1, 2, ��, M(k) (10)
j=1, 2, ��, M(k) (10)
ʽ�У�M(k)Ϊ��ʱ�Ѵ��ڵ�ģ��������Ŀ��ȡDj�����ֵDmax����
![]() j=1, 2, ��, M(k) (11)
j=1, 2, ��, M(k) (11)
���Dmax��![]() ����ôϵͳ������һ���µ�ģ����������������Ӧ���µ�������������������
����ôϵͳ������һ���µ�ģ����������������Ӧ���µ�������������������![]() ��ΪԤ����ٽ�ֵ���������Թ�ģ��ϵͳ�Ĵ�С���µ����������ľ�ֵ�����ֱ𱻸���Ԥ���趨�ij�ʼֵ
��ΪԤ����ٽ�ֵ���������Թ�ģ��ϵͳ�Ĵ�С���µ����������ľ�ֵ�����ֱ𱻸���Ԥ���趨�ij�ʼֵ![]() ��
��![]() ��Ϊ��ֹ�²����������������Ѵ��ڵ����������������ƣ���һ�����ƶȼ��ķ����Ը���������֮������Ƴ̶Ƚ����ж�������2��ģ������M��N�����Ե���������Ϊ��
��Ϊ��ֹ�²����������������Ѵ��ڵ����������������ƣ���һ�����ƶȼ��ķ����Ը���������֮������Ƴ̶Ƚ����ж�������2��ģ������M��N�����Ե���������Ϊ��
![]()
![]()
��m1��m2����
![]()
![]() +
+
![]() +
+
![]() (12)
(12)
![]()
![]() (13)
(13)
ʽ�У�h(x)=max{0, x}��m2��m1�ͦ�1����2�ֱ�ΪM��N�����������ľ�ֵ�ͱ�����ø����ƶȼ�ⷨ�����²��������������뼺�����������������ƶȲ����У�
![]() (14)
(14)
ʽ�У�![]() Ϊ��˹����������mji����ji�ֱ�Ϊ�����������ľ�ֵ�ͱ��M�ǵ�i�������ź�������������Ŀ�����Emax��
Ϊ��˹����������mji����ji�ֱ�Ϊ�����������ľ�ֵ�ͱ��M�ǵ�i�������ź�������������Ŀ�����Emax��![]() ��
��![]() ��
��![]() ΪԤ���趨��ֵ�����µ����������������ã���
ΪԤ���趨��ֵ�����µ����������������ã���
![]() (15)
(15)
��һ���µ�ģ���������ʱ�����µ�ģ�������������֮�佫����һ���µ�����Ȩֵwnew��wnewΪԤ���趨ֵ�������ֵ��
3.2 �����
���ڱ��ض���Ķ�̬��ȷ���ԣ����ڲ������仯���ⲿ�Ŷ��ȵȣ��ڲ���ѧϰ�����к��Ѿ�ȷ���![]() �Ϊ�˿˷�������Ⲣ�ӿ�ģ��ϵͳ�в�����ѧϰЧ�ʣ������л�������ѡ��һ�����ʵ��� ���
�Ϊ�˿˷�������Ⲣ�ӿ�ģ��ϵͳ�в�����ѧϰЧ�ʣ������л�������ѡ��һ�����ʵ��� ���
�����������������£�
![]() (16)
(16)
����![]() ����C��0��
����C��0��
(1) ![]() ��0������������л�����δ�õ����㣬��ʹ�����������Ϊs��
��0������������л�����δ�õ����㣬��ʹ�����������Ϊs��
(2) ![]() ��0������������л������õ����㣬��ʹ�����������Ϊ
��0������������л������õ����㣬��ʹ�����������Ϊ![]() ������
������![]() ���������������
���������������
Ϊ�˶��Թ������еIJ������е��������Ƕ�������л��������ĺ���Ei��
![]() (17)
(17)
ʽ�У�SRΪ�л����Կ��������������Ȼ��2�����������������
(1) ![]() ��0���л�����δ�õ����㣬��ʱ�������Ϊ
��0���л�����δ�õ����㣬��ʱ�������Ϊ
![]() (18)
(18)
(2) ![]() ��0���л������õ����㣬��ʱ�������Ϊ
��0���л������õ����㣬��ʱ�������Ϊ
![]() (19)
(19)
�����������л����Կ���������˱ȽϺ��ʵ������![]() ���������������������ݶ��½���ʹEi�����ﵽ��С���Ե���������Ȩֵ��
���������������������ݶ��½���ʹEi�����ﵽ��С���Ե���������Ȩֵ��
4 �����������
4.1 ����Ӧģ��PI����
���ñ�1����������������ͬ�����������Ӧģ��PI����ϵͳ�����������棬����ת��Ϊ1 200 r/min�����ת��Te��0.03 s��0.1 N/mͻ��Ϊ1 N/m������Ӧģ��PI�����봫ͳPI����ϵͳ����ͼ�ıȽ���ͼ1��ʾ��
��������ʵ��ͼ�ɵã�������ʱ����ͬ������£�����Ӧģ��PI����ϵͳ�봫ͳPI����ϵͳ��ȣ�ת�����������Ҳ����ֳ��������dz�С��������ĵ��ת��ͻȻ�仯ʱ������Ӧģ��PI����ϵͳ�ĵ��ת��ƽ������������ͳPI����ϵͳת����Ӧ���ֽϴ�ij�������������Ϊ�������ط����仯ʱ����ͳ��PI����������Ҫ���½��м����������������Ӧģ��PI����ϵͳ�е�ģ���������ڵ�������У�ʵʱ�����ת�ٺ���ֵ֮������e�������仯��![]() ����ͨ��ģ�����ƹ������ߵ�����������Ӧ��PI�������������Ӷ�ʵ���˱������PI���ơ�ʹ�������ϵͳ��������ʱ��̡�������³����ǿ�Ķ�̬���ܡ�
����ͨ��ģ�����ƹ������ߵ�����������Ӧ��PI�������������Ӷ�ʵ���˱������PI���ơ�ʹ�������ϵͳ��������ʱ��̡�������³����ǿ�Ķ�̬���ܡ�
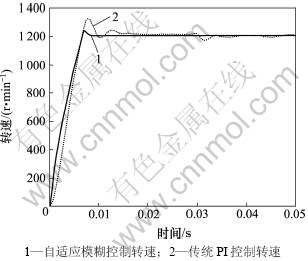
ͼ1 ��ͳPI����������Ӧģ��PIת����Ӧ����
Fig.1 Speed curves of traditional PI control and adaptive fuzzy PI control
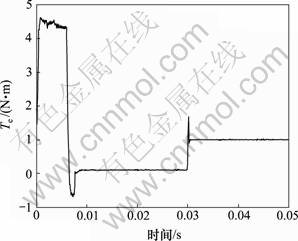
ͼ2 ����Ӧģ��PI����ת����Ӧ����
Fig.2 Electromagnetic torque curve of adaptive fuzzy PI control
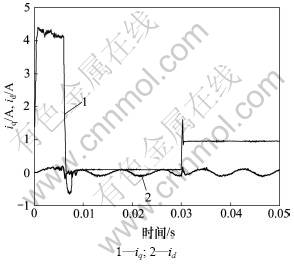
ͼ3 ����Ӧģ��PI���Ƶ�d-q�����
Fig.3 d-q axis current curve of fuzzy adaptive PI control
4.2 �Թ�ģ������
����ͬ��������ͬ�����������ʱ����ת��Ϊ 1 200 r/min�����ת��Te��0.03 s��0.01 N/mͻ��Ϊ0.5 N/m��ʹ���л����Ժ�δʹ���л����Ե�ת����Ӧ������ͼ6��ʾ��
��ͼ6��֪�����ߵ�����ʱ����ͬ������£�δʹ���л����Ե�ϵͳ�����˽ϴ�ij���������ת��ͻ��ʱ��ת���нϴ�IJ������ò�������ʱ�䳤��ϵͳ�ָ��ȶ�����ʱҲ��Խϳ�����ʹ���л����Ե�ϵͳ��ת����Ӧ������������ǿ���ܵ����ź��ܾ�����ٸ���ת�ٲ��ٴ��ȶ���
��1 ����ͬ������IJ���
Table 1 Parameters of PMSM

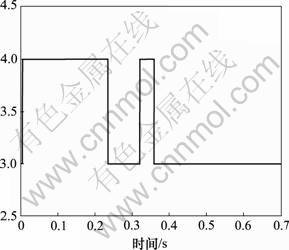
ͼ4 �Թ�ģ��������Ĺ���仯
Fig.4 Number of rules in self-control fuzzy neural network
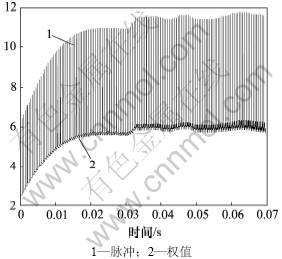
ͼ5 ���Ȩֵѧϰ����
Fig.5 Parameter learning process in weight value in output layer
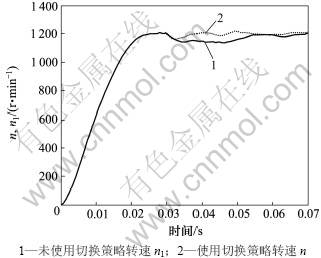
ͼ6 ʹ���л����Ժ�δʹ�õ�ת����Ӧ����
Fig.6 Speed curves of using and not using switching strategy
6 �ܽ�
����ʸ�����Ƶ�PI����ԭ�����ƺͷ���������Ӧģ��PI���������Թ�ģ�����Ƶ�������������ϵͳ���漰��������������������Ӧģ��PI���Ƶ�����ͬ�����ϵͳ�����������ڴ�ͳ��PI���ơ��Թ�ģ�����Ʋ������л����Լ��㷴��������Ч�ؿ˷��˲���ͻ������Ŷ������������ͬ��������ٸ�����Ŀ���Ч����
�ο����ף�
[1] ��־��. �����ŷ��˶�����ϵͳ[M]. ����: �廪��ѧ������, 2006.
SHU Zhi-bing. AC servo motion control system[M]. Beijing: Tsinghua University Press, 2006.
[2] Shyu K K, Lai C K, Tsai Y W, et al. A newly robust controller design for position control of permanent-magnet synchronous motor[J]. IEEE Transactions on Industrial Electronics, 2002, 49(3): 558-565.
[3] ׯΰ. ����dsPIC������ͬ�����ʸ������ϵͳ[D]. ����: ����������ѧ, 2007.
ZHUANG Wei. Vector control system of PMSM based on dsPIC[D]. Dalian: Dalian University of Technology, 2007.
[4] ������, ������, ����ϼ, ��. ����ͬ���綯������ģ��PI�����������[J]. ���ϴ�ѧѧ��, 2008(3): 272-275.
PENG Chang-hua, WANG You-li, SHEN Yan-xia, et al. Design of novel fuzzy PI controller for PMSM drive system[J]. Journal of Jiangnan University, 2008(3): 272-275.
[5] Jung J W, Choi Y S, Leu V Q, et al. Fuzzy PI-type current controllers for permanent magnet synchronous motors[J]. IET Electric Power Applications, 2011, 5(1): 143-152.
[6] Lin C J, Chen C H. A self-constructing compensatory neural fuzzy system and its applications[J]. Mathematical and Computer Modeling, 2005, 42(3): 339-351.
(�༭ �°���)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ�������������������˲�֧�ּƻ���Ŀ������ʡ�Ƽ��ƻ���Ŀ�������пƼ�������Ŀ��������Ȼ��ѧ����������Ŀ(51079013)
ͨ�����ߣ���˫��(1968-)���У������������ˣ����ڣ������Զ������о����绰��0411-84723025��E-mail: shuanghe@dlmu.edu.cn
ժҪ���������ͬ�������������ķ����ԡ��������ǿ��ϵ��������ֱ��������Ӧģ��PI�����������ع�ģ������������ʸ��PI���ƻ������������ͬ���������Ӧģ��PI��������������Ƹ����л����Ե��Թ�ģ������������Ч�ؿ˷�����ͻ������Ŷ���Ӱ�죬���ϵͳ³���ԡ������ԣ���ʵ�ֿ��������������ߵ�������������������Ӧģ��PI�����������ڴ�ͳ��PI���ƣ�ͬʱ���ع�ģ���������ڹ̶��ṹģ�����ơ�
