
����D-S���ۺĽ��Ƴ�����·���滮�㷨
����ƽ1��������1�������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
���ۺĽ��Ƴ������ϵ�·���滮�㷨�����ö�����ɴ�����̽�������������ɴ�����̽��Ļ�����Ϣ�����ò�ȷ����֤������D-S���۽��������ںϣ��õ���ȷ�Ļ�����Ϣ���ڴ˻����ϣ����øĽ����Ƴ�����ʵ�ּ������������ϣ��˷��˹��Ƴ�����Ŀ��㸽�����ϰ���ʱ���ɴ��ȱ�㡣��VC����ƽ̨��2���㷨���з��棬��������֤���㷨����Ч�ԡ�
�ؼ��ʣ�
�������·���滮��D-S�������Ľ��Ƴ�����
��ͼ����ţ�TP391.9 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S2-0341-06
Path planning algorithm based on D-S theory and improvements potential field
WANG Sui-ping, GUI Wei-hua, PAN Tian-guo
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: A path-planning algorithm based on D-S theory and improved artificial potenial field was presented. The environment information was detected by multi-sonar sensors and was fused by D-S theory for acquiring more precision environment information. The navigation and obstacle-avoidance were realized by using improved artificial potential field. The problem that the vehicle can not reach the planning goal position when some obstacles exist near it is solved. The simulation and experiment were carried out using the developing platform VC and experiment system. The effectiveness of these two methods was verified by the simulating results.
Key words: mining machine; path planning; D-S theory; improved potential field
����̲��ŷḻ�Ŀ����Դ���俪���ֶε��о������ҹ������Դ�Ŀɳ������ü����ҵ�����ķ�չ������Ҫ��ս�����塣������������6 km ��ס���ϡ������������ʣ���ҵ����Ϊ����Ȼ�⡢����ѹ��δ֪���ӻ�������·���滮����ֱ�ӹ�ϵ������ɿ�ϵͳ���������ܺͲɿ�Ч�ʡ�
Ŀǰ��������·���滮��Ҫ�㷨���˹��Ƴ�����դ�����ɿռ䷨�ȵȡ��˹��Ƴ����ǽ��������ڻ����е��˶���Ϊһ��������˹��������е��˶������㷨�ṹ�����ڵײ��ʵʱ���ƣ���ʵ�ʱ��Ϻ�ƽ���Ĺ켣���Ʒ���õ��˹㷺��Ӧ�ã��䲻�����ڴ��ھֲ����Ž⣬���ײ�������������ʹ�������ڵ���Ŀ���֮ǰ��ͣ���ھֲ����ŵ㡣Ϊ����ֲ���Сֵ���⣬�Ѿ������һЩ�Ľ��㷨����Sato�����Laplace�Ƴ������Ľ��㷨��ͨ����ѧ�Ϻ��������Ƴ����̣�����֤�Ƴ��в����ھֲ���ֵ��դ���ƶ������˹��������ֽ��һϵ�о��ж�ֵ��Ϣ������Ԫ����¼������Ϣ�����ϰ���ĵط��ۻ�ֵ�Ƚϸߣ��ƶ������˾ͻ�����Ż��㷨�ܿ���դ���ֳ����õ����ܣ����÷������ڻ����ֱ����뻷����Ϣ�洢����ì�ܡ����ɿռ䷨��һ�־����·���滮���������ѻ��������ڵĻ����ռ�ֳ������֣������ɿռ���ϰ���ռ䡣�����������ɿռ����ҵ�һ����ij������ָ��滮�����İ�ȫ·�������ŵ��DZȽ�����ʼ���Ŀ���ĸı䲻�������ͨͼ���ع���ȱ���Ǹ��ӳ̶����ϰ���Ķ��ٳ����ȣ�����ʱ��������·����
���������������D-S���ۺĽ��Ƴ������ϵ�·���滮�㷨����������ɴ�����̽��Ļ�����Ϣ�����ò�ȷ����֤������D-S���۽��������ںϣ��õ���ȷ�Ļ�����Ϣ���ڴ˻����ϣ����øĽ����Ƴ�����ʵ�ּ������������ϣ��˷����˹��Ƴ�����Ŀ��㸽�����ϰ���ʱ���ɴ��ȱ�㣬ͨ��������֤���㷨����Ч�ԡ�
1 ����D-S���ۺĽ��Ƴ������ϵ�·���滮�㷨
D-S֤��������Dempster[1]��1967�����������Shafer[2]��������ͷ�չ���γɵIJ�ȷ���������������㷺Ӧ������Ϣ�ںϼ�ר��ϵͳ����������[1-3]�и����˾��嶨��ͻ������ۡ�D-S���۲������κ��������Ǹ�����Ϊ������ͨ����һЩ�¼��ĸ��ʼ���Լ���Խ������κ���������˵����ȷ�����Ի�õĸ��ʣ���Լ������Ϊ�ϸ�ĸ���ʱ��������Ϊ�����ۡ�
1.1 Dempster�ϳɼ��ж�����
��Dempster�ϳɷ�������������n��֤�ݹ�ͬ�����µĻ������Ŷȷ��亯������ˣ��жഫ�����������ںϡ�
����P������������һ���ഫ����ϵͳ�������д����������ںϵõ���s������As(s=1, 2, ������, K)���ഫ�����ںϺ���������Ŷȷ��亯��Ϊ��
 (1)
(1)
����ȷ���������ںϺ������Ŷȷ��亯��Ϊ��
 (2)
(2)
��֤���������֤�ݺ���ж������Ӧ�ý��ܹ���������Ŀ��ģʽ�ķ�����ߣ����ж�����Ϊ��
(1)�ж���Ŀ�����;��������ŶȺ���ֵ��
(2)�ж���Ŀ�����ͺ��������͵��ŶȺ���ֵ֮�����ij�����ޣ�
(3)��ȷ���ŶȺ���ֵ����С��ij�����ޣ�
(4)�ж�Ŀ�����͵��ŶȺ���ֵ���ڲ�ȷ���ŶȺ���ֵ��
��������ɱ�ʾΪ����![]() ������
������
![]()
![]()
����
��A1Ϊ�о���������У���1�ͦ�2ΪԤ���趨�����ޡ�
1.2 �����㷨
1.2.1 ����ϵ�任
���ö�ά�ѿ�������դ���ͼ�����������˻�����դ���С��ѡȡֱ�ӹ�ϵ�������㷨�ľ��ȣ����ǵ����������������ص��Լ������˵������ߴ磬ѡ��0.5 m��0.5 m Ϊһ��դ������������ϵ�����������˻���������ϵ��ѡȡ��ͼ1��ʾ��
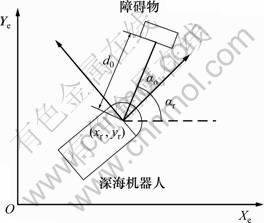
ͼ1 ����������ϵ����������ϵ��ӳ��
Fig.1 Map of robot coordinate system to environment coordinate system
������ʽ����������õ��ϰ�����Ϣӳ�䵽��������ϵ�У�
 (3)
(3)
ʽ�У� (x��e, y��e)Ϊ������ڻ�������ϵ�е����ꣻ(xr, yr, ��r)Ϊ�������ڻ�������ϵ�е�λ�ˣ�d0Ϊ������������ԭ��ľ��룻��oΪ�����ʸ���ڳ�������ϵ�е�ʸ���ǡ�����������ϵ��ԭ��ѡ�ڻ�����ǰ�������е㡣������ʽ������(x��e, y��e)ӳ�䵽��������ϵ����Ӧ��դ��ceil(I, j)�ϡ�
![]() (4)
(4)
ʽ�У�i��jΪդ����ţ�wΪդ����ȡ�
1.2.2 �������ɴ������Ļ�������
�ڼ����ģ�ͳ��Ͼ������0.28 m��ͬһˮƽ150��Բ���ϰ�װ7�����ɴ�������ÿ��������������Ϊ30�㣬��Ч������ΧΪ0.15~10.70 m��ÿ���������������Ϊ23�㣬���Ը��ǻ�������ΧԼ180��Ŀռ䡣�ٶ���װ�ڻ������ϵ�ijһ��������̽��ֵΪr�����ݳ��������������������ԺͲ��ԭ�����ϰ����Ͼ��봫���������һ�㷢�����������䣬�˵�Ӧ�ô���һ��Բ���ϣ���Բ���뾶Ϊr���Ƕ�Ϊ�����ǡ�Ϊ�˼��㣬�û���Ӧ���ҽ��ƴ��满�����ڳ��������صľ��봦�������������Ƕ�Ӧ�Ļ�����Χ�ڴ����ϰ��ĸ��ʳʾ��ȷֲ����Ҹ����ܺ�Ϊ1��ijһ������������ijһʱ�̶Ի�������̽�⣬��(i, j)��դ����3�ֿ���״̬���������ϰ���(full)���������ϰ���(empty)��ȷ������ͼ2��ʾ��
�����ڳ��������صľ��봦�������������Ƕ� Ӧ���ϵ�( i, j) ��դ������ϰ���Ļ������ʸ�ֵ Ϊ��
![]() (5)
(5)
���У�rΪ������̽��ϰ���ľ��룻��Ϊ�����ǵ�һ�롣�������ϰ���Ļ������ʸ�ֵΪ��
![]() (6)
(6)
�����ڴ������������ڵ�����դ����Ȼ�������ϰ����
![]() (7)
(7)
![]() (8)
(8)
���ڸ�դ���״̬���ɶ���һ��������={E, F}��E�����������ϰ��F���������ϰ��{E, F}����״̬��ȷ�������ݼ�![]()
![]() {E, F}}����mΪʶ���ܦ��ϵĻ������Ŷȷ��䣬
{E, F}}����mΪʶ���ܦ��ϵĻ������Ŷȷ��䣬![]()
![]() ��m(A)��ΪA�Ļ��������������ڸ�դ����
��m(A)��ΪA�Ļ��������������ڸ�դ����
![]() (9)
(9)
![]() (10)
(10)
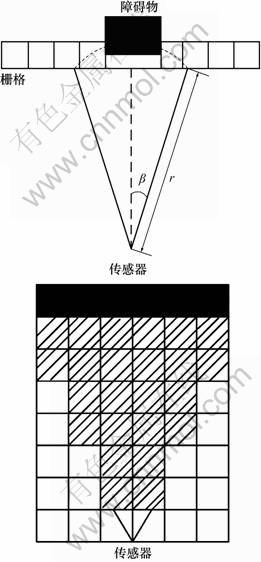
ͼ2 ���ɴ���������̽����ʸ�ֵ
Fig.2 Making probability value for environment detecting of sonar sensors
��ˣ�ֻҪ֪��mij(E)��mij(F)���������mij({E, F})�����ݴ�������ģ�ķ�����mij(E)��mij(F)�ڻ����˵�k���������IJ�����Χ�ڵĸ�ֵ���£�
![]() cell(I, j)�ʻ����������ڵĻ���1�� k ��7�����ǵ���������
cell(I, j)�ʻ����������ڵĻ���1�� k ��7�����ǵ���������
![]()
![]() cell(i, j)�ʴ��з�Χ�ڵ���Ч����
cell(i, j)�ʴ��з�Χ�ڵ���Ч����
������������ÿ��һ����������������ȡһ�鴫�з�Χ�ڵĻ�����Ϣ���ݣ����õ�һ��դ��Ļ������Ŷȷ��䡣�Դ��Ŷ����ڴ�֮ǰ�ۼƵ�ͬһդ��Ļ������Ŷ�ֵ����D-S�ϳɹ����֤���������������ںϣ��Ϳ��Եõ����з�Χ�ڸ��º�Ļ���״̬���ںϹ�ʽ���£�
![]()
![]() (11)
(11)
ͬ���ɵã�
![]() (12)
(12)
���У�mp(g)��ʾ�����˴ӳ�ʼ����ǰ��֮ǰ��̽������Ͼ��ںϵõ���ijһդ��Ļ�����������mc(g)��ʾ�����˴������ڵ�ǰ��̽��õ���ͬһդ��Ļ��������������û��ڻ������ʸ�ֵ�ľ��߷���[4]�ж�ijһդ���Ƿ�����ϰ����ж��������£�
![]() ����
����
![]() (13)
(13)
![]() (14)
(14)
����
(15)
��A1Ϊ�о���������У���1�ͦ�2ΪԤ���趨��ֵ��
1.2.3 �øĽ����Ƴ������е����ͱ���
�˹��Ƴ�����Khatib��1986������ģ������˼�������˶��ռ��У�����������Ϊһ�ʵ㣬ʹ���ʵ��ܵ��˹��Ƴ��������ã��Ƴ��а������������������ͼ3��ʾΪ�������˹��Ƴ������У�OΪ�ϰ��GΪĿ�ꡣ
(1) ��������������������ѡȡ
���Ƴ��У������ϰ���������Ƴ��Ի����˲����ų����ã��Ҿ���Խ�����ų�����Խ��֮��ԽС�������Ƴ�����Ƴ��������Ƴ����ƣ������ɷ��ȣ��ʳ����ƺ���Ϊ��
 (16)
(16)
ʽ�У���Ϊ�����˾��ϰ���ľ���(m)����mΪ�Ƴ����õ����Χ(m)��KrΪ����ϵ����
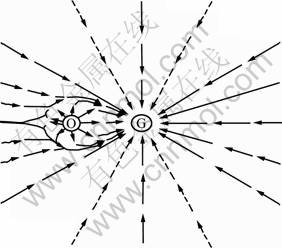
ͼ3 �˹��Ƴ�
Fig.3 Artificial potential field
�������ܵ��ij���FrΪ��
 (17)
(17)
��![]() ʱ��
ʱ��![]() �������������ϰ�������ʱ���ܵ��ij���Ϊ�����Ϊ������������ϰ����������趨һ����С��ȫ�����0����
�������������ϰ�������ʱ���ܵ��ij���Ϊ�����Ϊ������������ϰ����������趨һ����С��ȫ�����0����![]() ʱ��
ʱ��![]() ��ͬʱ��ΪʹFr������Fr��Ϊ��
��ͬʱ��ΪʹFr������Fr��Ϊ��
 (18)
(18)
��0����m�Ĵ�Сȡ���ڻ����˵ijߴ硢�ٶȼ��������ϰ����ϡ��̶ȡ�
Ŀ��G���ƺ���U��ͬ��Ҳ�ɻ��ھ���ĸ��ȡ�ƺ���Ϊ��
![]() (19)
(19)
ʽ�У�K��Ϊ����ϵ��������F��Ϊ��
![]() (20)
(20)
���ű�ʾ��������ָ��Ŀ��㡣������һ��������ѡȡһ�����ʵ�ֵ��ʹ�������ں����������´ﵽĿ��㡣����Ϊ��
![]() (21)
(21)
(2) �����ƺ����ĸĽ�
ʵ���ϣ�����������������ƻ�����ʱ�����Ŀ�����ϰ����Ӱ�췶Χ֮�ڣ��������ʼ�ղ��ܵ���Ŀ�ꡣ��Ϊ����������Ŀ�꿿��ʱ�������ϰ���ҲԽ��Խ���������������Ӻܿ죬�������ܵ��ĺ���Ϊ���������ܵ���Ŀ�ꡣ������ΪĿ��㲻�������Ƴ���ȫ����С�㡣����ڻ�������Ŀ��ƽ�ʱ���������������㣬��ôĿ��㽫�������Ƴ���ȫ����С�㡣��ˣ�����һ���µij���������������������������ǻ�������Ŀ��֮�����Ծ��룬�Ӷ�ȷ�������Ƴ���Ŀ���ȫ����С���Ľ��ij����ƺ���Ϊ��
 (22)
(22)
![]() Ϊ�����˵�Ŀ���ľ��룬����Ϊ��
Ϊ�����˵�Ŀ���ľ��룬����Ϊ��
 (23)
(23)
��ʽ(23)��ʽ(18)��ȣ������˻�������Ŀ��֮�����Ծ��룬���Ż�������Ŀ��Ŀ�����������С���������㣬�����������������´ﵽĿ�ꡣ
2 ����
���������㷨������VC����ƽ̨���з��档ʵ���ϣ�ÿ�������ܹ�����һ���Ƕȷ�Χ��̽���������ԣ�ֻʹ��7�����ɾͿ�����Ҫ�����������������ʹ�õ���ģ������̽�ⷽʽ����ijһ��ֱ�� �������ɫ��̽���ϰ���ģ������ܼ��̽������Χһ���Ƕȵ��������ԣ�7��̽������ԶԶ���� �ģ���ˣ��ڷ����в���13��̽���ߣ��䲼����ͼ4��ʾ��
�ڼ���������У��ϰ������ɫ����Ļ���趨Ϊ��ɫ����Rightcolor = RGB(255, 0, 0)��������ʼ���ظ����ķ�����������ص���ɫ������ij���ص����ɫΪRGB(255, 0, 0)ʱ�����¼�õ�����꣬����õ㵽�����˵�ǰλ�õľ��벢���ء�����̽������0�ŵ�6��(�ڷ����������0�ŵ�12��̽����)���˶���绷������̽�⣬��ͼ5��ʾ��ͼ5(a) Ϊ������ͼ5(b)��ʾΪ���ӻ�����Ŀ��㸽�����ϰ�����������������㷨��ʹ�����˰�ȫ�Ĵ���ʼλ��Sͨ��δ֪�����ﵽĿ��λ��G��
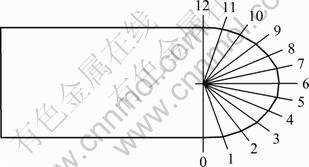
ͼ4 ���������̽���ߵIJ���ͼ
Fig.4 Layout of probe cable in simulation experiment
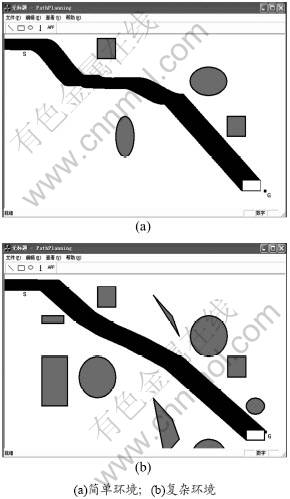
ͼ5 �������ڸ��ӻ�����ʵ�ֵ����ͱ���
Fig.5 Robot navigation and avoid obstacles in complex environments
3 ����
����D-S���۶�7�����ɴ�����̽��Ļ�����Ϣ�����ںϣ��õ��Ƚ�ȷ�Ļ�����Ϣ���ڴ˻����ϣ����øĽ��˹��Ƴ�����ʵ�ּ�����ĵ����ͱ��ϣ��˷����˹��Ƴ�����Ŀ��㸽�����ϰ���ʱ���ɴ��ȱ�㡣��������֤�˸��㷨����Ч�ԡ�
�ο����ף�
[1] Dempster A P. Upper and lower probabilities induced by a multivalued mapping[J]. The Annals of Mathematical Statistics, 1967, 38(1): 325-339.
[2] Shafer G. A mathematical theory of evidence[M]. Princeton: Princeton University Press, 1976: 77-85.
[3] ������. ֤�����������, �˹�����[M]. ����: �й������ѧ������, 1993.
DUAN Xin-sheng. Evidence theory and decision, artificial intelligence[M]. Beijing: China Renmin University Press, 1993.
[4] ����. �ഫ������Ϣ�ںϼ�Ӧ��[M]. ����: ���ӹ�ҵ������, 2000: 20-97.
HE You. Multiple sensor information fusion and its application [M]. Beijing: Electronics Industry Press, 2000: 20-97.
(�༭ ����Ƽ)
�ո����ڣ�2011-06-15�������ڣ�2011-07-15
������Ŀ�����ʺ��������о�������ʮ�塱��Ŀ(DY105-03-02-06)��������Ȼ��ѧ����������Ŀ(60505018)
ͨ�����ߣ�����ƽ(1956-)���У����Ͻ����ˣ���ʿ�����ڣ������˹����ܡ�������ˡ��ֳ��������������ϵͳ���о���E-mail: wangsp@csu.edu.cn
ժҪ���������D-S���ۺĽ��Ƴ������ϵ�·���滮�㷨�����ö�����ɴ�����̽�������������ɴ�����̽��Ļ�����Ϣ�����ò�ȷ����֤������D-S���۽��������ںϣ��õ���ȷ�Ļ�����Ϣ���ڴ˻����ϣ����øĽ����Ƴ�����ʵ�ּ������������ϣ��˷��˹��Ƴ�����Ŀ��㸽�����ϰ���ʱ���ɴ��ȱ�㡣��VC����ƽ̨��2���㷨���з��棬��������֤���㷨����Ч�ԡ�
