
DOI�� 10.11817/j.issn.1672-7207.2019.09.013
RGB-D��MeanShift���ϵ�ʵʱĿ�����
������,���,���Ľ�,����
��½�����̴�ѧʯ��ׯУ�� ��������ϵͳʵ���ң��ӱ� ʯ��ׯ��050003��
ժ Ҫ��
hift�����㷨Ŀ�����ܵ���Χ���Ʊ���������ŵ����⣬����ͼ���RGB-D�������о���ʵ�ֽ��RGB-D��MeanShift��ʵʱĿ������㷨�����ȣ����һ����ӱ�������Զ��������Ż������;���(advanced quadratic-form distance��AQFD)����Σ�������ɫ�������������������Ȩ����������Ӧ�������ƺ�Ŀ��ģ���²��ԣ���Ը��㷨���з������������Jetson TX2ƽ̨ʵ�֡��о���������������㷨��Ŀ���ܵ���Χ���Ʊ������������������ܹ����Ŀ��������������Ƚ��㷨Staple���������õ�ȷ����³���ԣ������ܹ�Ӧ����ʵʱ���١�
�ؼ���:Ŀ����٣�MeanShift��RGB-D��ʵʱ����
��ͼ�����:TP391.4 ���ױ�־��:A ���±��:1672-7207��2019��09-2163-08
Real-time object tracking combined RGB-D with MeanShift
WANG��Guanglong, TIAN��Jie, ZHU��Wenjie, FANG��Dan
(Laboratory of Nanotechnology and Microsystems�� Shijiazhuang Campus of Army Engineering University, Shijiazhuang 050003, China)
Abstract: Arm to solve the problem that the object is susceptible to interference from similar surrounding background in MeanShift, RGB-D feature was introduced, and thus a real-time object tracking combined RGB-D with MeanShift was proposed. Firstly, a novel similarity measurement method, advanced quadratic-form distance (AQFD),was put forward. Secondly, the online self-adaptive adjustment mechanism of feature weights and updating strategy of object model were improved. Finally, the method was simulated based on Matlab and implemented on Jetson TX2. The results show that the proposed method which is better than Staple performs well in accuracy and robustness in the case that the object is disturbed by similar surrounding background, and it can be applied to real-time tracking applications.
Key words: object tracking; MeanShift; RGB-D; real-time tracking
Ŀ������Ǽ�����Ӿ��������Ҫ�о�����ͨ�����ڵ�Ŀ����ͷʵ�����ˡ��������ϰ����Լ���־���Ŀ����Ϣ�IJɼ�������Ŀ���ڳ�ʼ֡�е�λ�úʹ�С���������Ƴ�Ŀ���ں���֡ͼ���е�״̬�����ǣ���Ŀ����ͷ�ɼ���Ŀ��������Ϣ���ޣ���Ƚ϶��ԣ�˫Ŀ����ͷ���Ը���ȫ��ط�ӳĿ��������Ϣ����ȡ��ȷ�����������Ŀ����ٰ����������̵IJ���һ����Ի���Ϊ�б�ʽ����������ʽ����[1]���б�ʽ������Ҫ���������ࣺ��������˲������ѧϰ�ĸ����㷨��HENRIQUES��[2-8]������˲��о�������������Ҫ���ף������CSK��KCF/DCF��Staple��CN��DSST��C-COT[7]��ECO[8]���㷨���ֱ����������߶ȸ��¡����ͱ߽�ЧӦ��ģ���²��ԡ�����ѵ�����ȽǶȽ����Ż����������ѧϰ�ĸ����㷨�������죬ѧ���ǴӲ�ͬ�ǶȽ��ѵ������ȱʧ������[9-10]���б�ʽ�����㷨�����˱�����Ϣ��һ�������³���Ը�ǿ�������ѵ�������������̶Ƚϸߣ���ѵ������Ӱ�켫��MeanShift��������ʽ�����㷨������ڲ����١�³����ǿ���ٶȿ죬�ǵ�ǰĿ������������Ҫ�о�����֮һ[11]��VOT 2015�ٷ��Ƽ���ʵʱ�㷨�Ͱ�������MeanShift��ܵ�ASMS(scale-adaptive mean-shift)[12]��ƽ��֡�ʴ�125 ֡/s��Ȼ����MeanShiftֻ������Ŀ�����ɫֱ��ͼ��������Ŀ���뱳����ɫ���ʱ��������Щ��������ĸ��š�������[13-14]ͨ����������˲��ķ���������㷨�ķֱ������������˲�һ���̶���Ӱ�����㷨��ʵʱ�ԡ���������RGB-D������Խ��Խ���Ӧ����3D�˻���������Ӧ���У����ܹ�ʵ������ʶ��ȹ���[15]��2015������Stereolab��˾�Ƴ�3D�����ZED��������ʵʱ��ȡ����������ڴ˻����ϣ�����������˫Ŀ�������ZED����ͼ��RGB-D��������MeanShift��ܻ���������˻���RGB-D��ʵʱ�����㷨�����ȣ�����Ż������;���������Զ�����������Bhattacharyyaϵ��������˶����ĺ�������ȷ�ԣ���Σ�������ɫ�����������������Ȩ����������Ӧ�������ƺ�Ŀ��ģ���²��ԣ����ͨ�������ʵ������ķ�����֤�㷨����Ч�ԡ�
1 ����RGB-D��MeanShift��ʵʱ�����㷨����˼��
MeanShift��һ�ֳ��õ�Ŀ������㷨������㷨��Ŀ�����ܵ���Χ����������ŵ����⣬��������RGB-D�������������������ɫ�������ںϣ������ɫֱ��ͼ��ģʽ���������ͼ�����������ֱ��ͼ��ʵ���з��֣����ٹ����д���Ŀ�궪ʧ����һ���۲췢�֣���Ŀ�귢��Сλ��ʱ��Bhattacharyyaϵ����������仯��ij�ε��Թ�����ǰһ֡����ֵ�ߴ�0.898 6������һ֡����ʱͻ����0.588 3����������Bhattacharyyaϵ������ֱ��ͼ�����ӿռ������������µġ��ü����������������������ֱ��ͼ����ˣ����������һ����ӱ�������Զ��������Ż������;���(advanced quadratic-form distance��AQFD)����ֿ����˲�ͬ�ӿռ�֮�������ԺͿɷֱ��ԡ�������ɫ��������������������һ����������Ȩ������Ӧ�������ơ����ò�ͬ������Ļ����ԣ����ƥ��ȵͼ����ŶȲ���������и��£�ÿһ֡���ֻѡ��1�����������Ŀ��ģ�͵���Ӧ�����Ƚ��ԣ���һ��������Ŀ��ģ���²��ԡ�
������Ż��㷨������ͼ1��ʾ��
�����t֡���ٽ��Ϊ



Step 1 ����

Step 2 ����Ȩ��ͼ��


Step 3 ���ֳ߶�

Step 4 ����
Step 5 ������4�õ��Ľ�����沽��1�е�����������ظ�����1~4ֱ���ռ�ά�ͳ߶�ά��������ﵽָ������������
Step 6 ������²��ԵĽ���Ŀ��ģ�͵ĸ��¡�
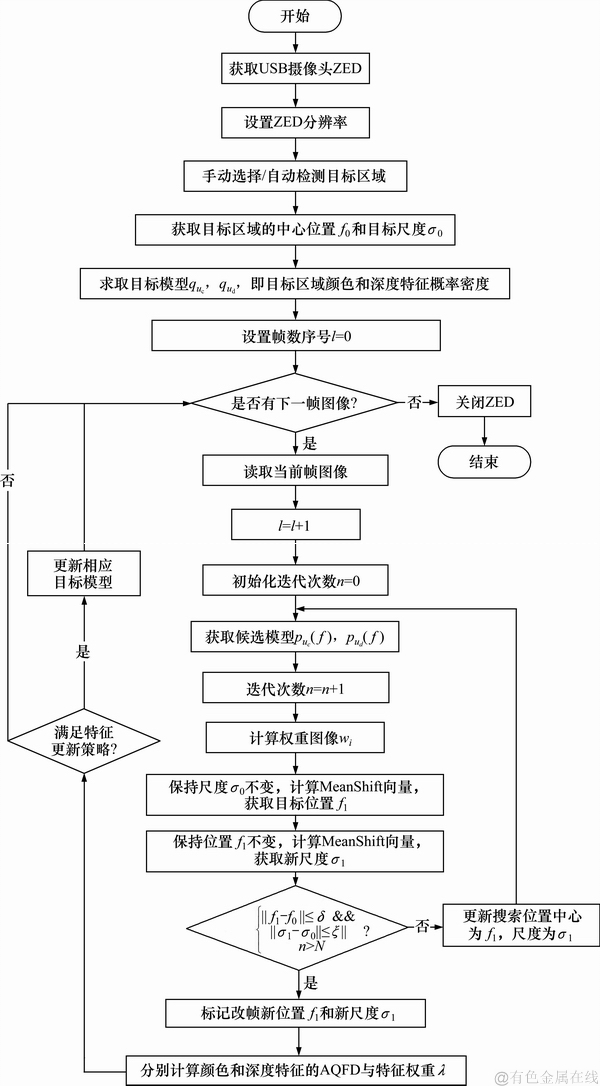
ͼ1���Ż��㷨����ͼ
Fig. 1��Flow chart of advanced algorithm
2 RGB-D��MeanShift���ϵĸ����㷨
2.1�������Ż������;���������Զ�������
���ڴ�ͳ�������Զ�������Bhattacharyyaϵ����ǰ�������Ǽ���ֱ��ͼ���ӿռ��������ģ������ֱ��ͼ������ü�����������ˣ����������һ���µ������Զ��������������;���(quadratic-form distance��QFD)��ֿ����˲�ͬ�ӿռ�֮�������ԣ���ͨ��Mahalanobis�����ݻ����ɣ�����Ϊ

ʽ�У�










��ȻQFD�������ӿռ�֮�������ԣ������ӿռ���������ֶȵͣ�Ϊ�ˣ������Ҿ�����QFD���ϣ�ּ����߸��ӿռ�Ŀɷֱ��ԡ����Ҿ��빫ʽΪ

ʽ(4)Ĭ��ֱ��ͼ���ӿռ�����������ʽ(3)����ʽ(4)�Ż�Ϊ

��


��Ϊ�Ż������;��롣��ʽ(2)��֪��ӵ��








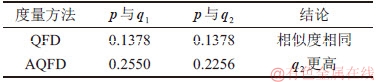
�Ż������;���ȿ����˲�ͬ�ӿռ�֮�������ԣ�ͬʱҲ������ӿռ�֮��Ŀɷֱ��ԡ�����˵������




��1��QFD��AQFD�����Զ�������Ա�
Table 1��Measurement results of QFD and AQFD
2.2��������ɫ���������������Ȩ������Ӧ����������Ŀ��ģ���²���
���ڶ�������MeanShift����������ֱ��ͼ����[17]���������Ϊ��������������ֱ��ͼһ����нϸ�ά����Ŀ�������ֲ�ϡ�裬���ܵ����ա��˶�ͼ��ģ�������ظ��š��ֱ������ɫ�����ֱ��ͼ����Ŀ��ģ�ͣ�����������Ӧ��������Ȩ�أ�����ӦĿ���ʵʱ�仯��
��





ʽ�У�
Ϊ��ӦĿ������Χ������ʵʱ�仯��������������Ȩ������Ӧ�������ƣ�����Ӧ��������





��ʽ(10)��֪��


ʽ�У�
��
ʽ(12)��������Ȩ��ֻ�����



ʵ��Ӧ�ù����У������ⲿ(���ա��ӽǵ�)�仯������(�α䡢��̬��)���ص�Ӱ�죬Ŀ��ģ�ʹ��ڽ���Ĺ��̣���ˣ�����������Ŀ��ģ���²���[18]�dz�ʱ����Ч����Ŀ��ı�Ҫ������������Ŀ��ģ���²��Լ���Ŀ�����Ӧ�����Ƚ���֮��Ѱ��ƽ�⣬������²������£�

ʽ�У�



���ڶ�����ģ�ͣ�����������֮��Ļ����Խ��ģ��Ư�����⡣��

���IJ��õ�Ŀ��ģ���²�����Ҫ���ƥ��ȵͼ����ŶȲ�������������ȿ��Ա������ĸ����������Ŀ��ģ�͵�Ư�ƣ��ֿ���ʹ��Ŀ��ģ�ͶԻ�������һ������Ӧ�ԡ��ֱ�Ϊ�Ż������;���������Ȩ��������ֵ



���ҽ�������ʽ(14)����ֵ����ʱ���Ÿ��¸�����ģ�ͣ����ֲ��䡣ÿһ֡���ֻѡ��һ���������£��Ա�������Ŀ��ģ��Ư�ơ�
3 ʵ�鼰�������
2015������Stereolab��˾�Ƴ���3D�����ZED�ǹ��������ܹ�Ӧ�����������ʵ�ִ�������ȼ����������ZED����Ϊ0.5~20.0 m������������Ϊ175 mm��30 mm��30 mm������Ϊ120 mm��֧�ֶ�֡�ʡ���ֱ��ʹ���ģʽ��֧��Linux��Windows��Mac����ϵͳ��֧��ARM�ܹ���X86�ܹ���������
3.1�����Ʊ����������ʵ��
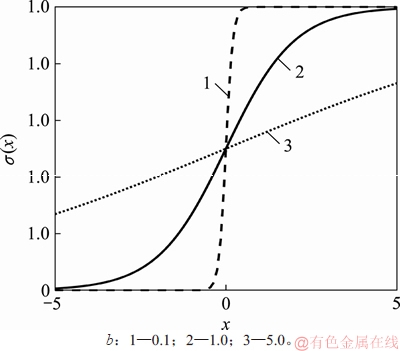
ͼ2��

Fig. 2��Function
��������ĸ����㷨��Ҫ����Ŀ�����������������й������������ǻ���2Dͼ�����У����ṩ�����Ϣ����ˣ����Ļ���ZED������ɼ��˲����������궨��ÿ֡ͼ����Ŀ��λ�õ���ֵ�����ڽ��в�ͬ�㷨�����ܵĶ����Աȡ���i5-7300HQ��������8GB�ڴ桢Matlab R2017b�����£��ֱ��������[19]�еľ���MeanShift�㷨�������㷨��Staple�㷨[4]����������A���ֱ��ȡ�˵�16֡��23֡��25֡��27֡��29֡ͼ����ڹ۲죬���㷨����Ч����ͼ3��ʾ��
��ͼ3��֪��MeanShift�㷨��Ŀ�걻�ڵ�ǰ����Ч�����ã���Ŀ�걻���Ʊ����ڵ���������ʧ�ܣ��������㷨��ȻҲ�ǻ���MeanShift��ܵģ�������������������Ժܺõ����ֿ�Ŀ������ɫ����ı�����������㷨�ı������ɿ��ԣ����Ŀ����������������������㷨��Staple���Ϻõ���������Ʊ����������ʵ�飬�Ա�ÿ֡ͼ��ĸ��ٽ������ֵ֮��ľ��룬���ÿ֡ͼ�������ƫ���ͼ4��ʾ������ÿ֡ͼ��ĸ����ʣ���


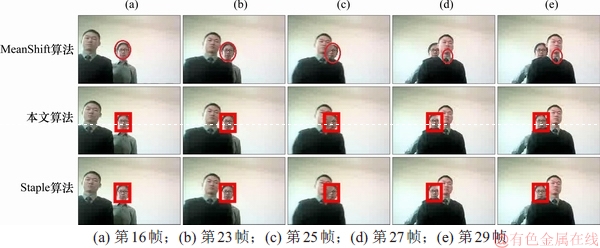
ͼ3��MeanShift�㷨�������㷨��Staple�ڲ�����A�еĸ��ٽ��
Fig. 3��Results of MeanShift, proposed method and Staple in benchmark A
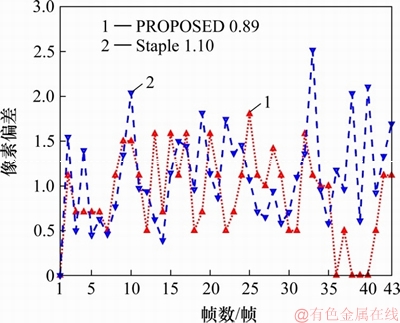
ͼ4�������㷨��Staple�㷨�ڲ�����A�е�����ƫ��
Fig. 4��Pixel error of proposed method and Staple in benchmark A
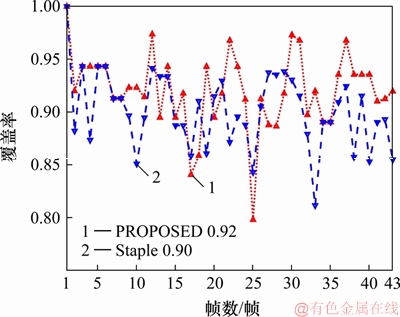
ͼ5�������㷨��Staple�㷨�ڲ�����A�еĸ�����
Fig. 5��Overlap rate of proposed method and Staple in benchmark A
Ϊ��һ��ʵ�鱾���㷨�ĸ���Ч��������һ�������Ѷ�ϵ�����ߵIJ�����B����������һ�������б������õ�Staple�㷨���жԱȣ��ֱ��ȡ�˵�10֡��25֡��28֡��30֡��33֡ͼ����ڹ۲죬����Ч����ͼ6��ʾ������ƫ������ʷֱ���ͼ7��ͼ8��ʾ��ʵ���������������㷨���ܵ����Ʊ�����������£����ܹ�ʵ��Ŀ����ȶ����ɿ����٣�չ���˽�ǿ��³���ԣ���Staple�㷨����ʧ�ܣ������㷨��Staple�㷨��ƽ������ƫ��ֱ�Ϊ14.82��86.14��ƽ�������ʷֱ�Ϊ0.72��0.51��

ͼ6�������㷨��Staple�㷨�ڲ�����B�еĸ��ٽ��
Fig. 6��Results of proposed method and Staple in benchmark B
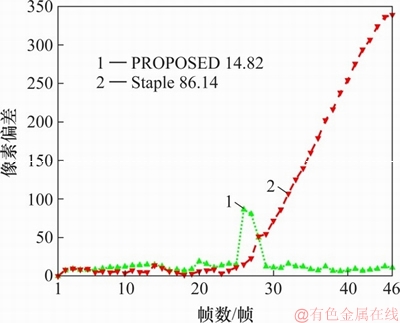
ͼ7�������㷨��Staple�㷨�ڲ�����B�е�����ƫ��
Fig. 7��Pixel error of proposed method and Staple in benchmark B
3.2��ʵ��ƽ̨���㷨ʵ��
ϵͳӲ��ƽ̨��Ҫ��Ƕ��ʽ�˹����ܳ�������ƽ̨Jetson TX2��3D�����ZED��ɣ�������������i5-4590 CPU��4GB�ڴ��Ubuntu14.04 64-bit����ϵͳ��ZED�ֱ�������Ϊ2 560��720�������㷨��ʵ�ֶ�����ѡ��Ŀ��ĸ��٣���ʵ���У�ѡ�������Ϊ�������Ŀ�꣬������������һ�����ȥ�ڵ�ԭʼĿ�꣬����Ч����ͼ9��ʾ��
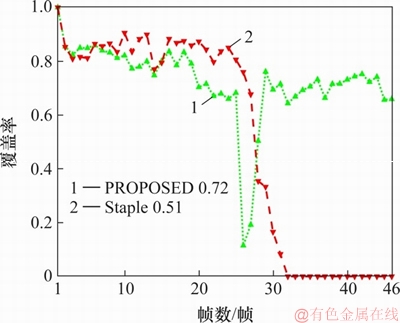
ͼ8�������㷨��Staple�㷨�ڲ�����B�еĸ�����
Fig. 8��Overlap rate of proposed method and Staple in benchmark B
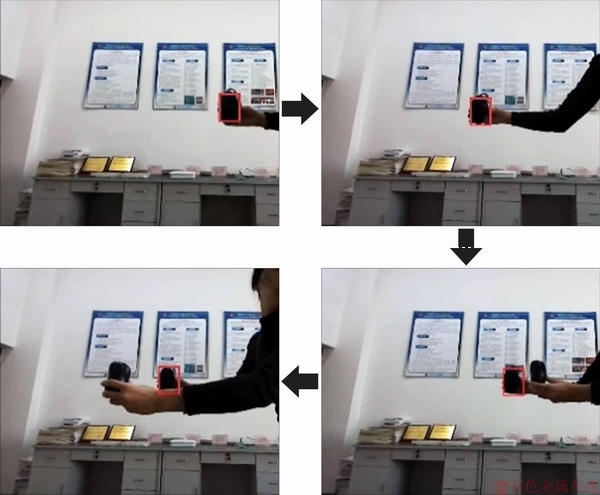
ͼ9��ʵʱ����Ч��ͼ
Fig. 9��Real-time tracking results
ʵ���������������㷨��ʵ������ѡ��Ŀ��ĸ��٣�ͬʱ�ھ��������ɫ�����ı�����������£���˳�������Ŀ���������չ���˽�ǿ��³���ԡ��ڷֱ���Ϊ2 560��720�������£�ƽ�������ٶ�ԼΪ30 ֡/s��������ʽҪ���24 ֡/s������ϵͳʵʱ��Ҫ��
4 ����
1) ����˫Ŀ�������ZED����RGB-D��������MeanShift��ܻ���������˻���RGB-D��ʵʱ�����㷨�����㷨�ǻ����Ż������;���������Զ���������ʵ��������Ȩ����������Ӧ������������Ŀ��ģ�͵ĸ��²��ԡ�
2) ��Ŀ�걻��Χ���Ʊ����������ʱ�������㷨���ܹ����Ŀ���������ƽ������ƫ������ʷֱ�Ϊ0.89��0.92������Staple�㷨��
3) �����㷨���Ѷ�ϵ�����ߵIJ����������ܹ��ȶ����ɿ������Ŀ���������ƽ������ƫ������ʷֱ�Ϊ14.82��0.72������Staple�㷨��
4) �����㷨����Jetson TX2ƽ̨�Ĵ����ٶȴ�30֡/s������ϵͳʵʱ��Ҫ��
�ο����ף�
[1] ������, �²�, ����, ��. �����Ӿ���Ŀ�������������[J]. �Զ���ѧ��, 2016, 42(10): 1466-1489.
YIN Hongpeng, CHEN Bo, CHAI Yi, et al. Vision-based object detection and tracking: a review[J]. Acta Automatica Sinica, 2016, 42(10): 1466-1489.
[2] HENRIQUES J F, CASEIRO R, MARTINS P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[M]// European Conference on Computer Vision. Berlin, Heidelberg: Springer, 2012: 702-715.
[3] HENRIQUES J F, CASEIRO R, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596.
[4] BERTINETTO L, VALMADRE J, GOLODETZ S, et al. Staple: complementary learners for real-time tracking[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition. New York, USA: IEEE, 2016:1401-1409.
[5] DANELLJAN M, KHAN F S, FELSBERG M, et al. Adaptive color attributes for real-time visual tracking[C]//Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, USA: IEEE, 2014: 1090-1097.
[6] DANELLJAN M, H GER G, KHAN F S, et al. Discriminative scale space tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(8): 1561-1575.
GER G, KHAN F S, et al. Discriminative scale space tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(8): 1561-1575.
[7] DANELLJAN M, ROBINSON A, KHAN F S, et al. Beyond correlation filters: learning continuous convolution operators for visual tracking[C]//European Conference on Computer Vision. Cham: Springer, 2016: 472-488.
[8] DANELLJAN M, BHAT G, KHAN F S, et al. ECO: efficient convolution operators for tracking[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition.New York, USA: IEEE, 2017: 6931-6939.
[9] WANG N Y, YEUNG D Y. Learning a deep compact image representation for visual tracking[C]//Proceedings of the 26th International Conference on Neural Information Processing Systems. Lake Tahoe, USA, 2013: 809-817.
[10] NAM H, HAN B. Learning Multi-domain convolutional neural networks for visual tracking[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition. New York, USA: IEEE, 2015:4293-4302.
[11] ���ҷ�, éҫ��, �����. ����Mean Shift���Ӿ�Ŀ������㷨����[J]. �������ѧ, 2012, 39(12): 16-24.
GU Xingfang, MAO Yaobin, LI Qiujie. Survey on visual tracking algorithms based on mean shift[J]. Computer Science, 2012, 39(12): 16-24.
[12] VOJIR T, NOSKOVA J, MATAS J. Robust scale-adaptive mean-shift for tracking[J]. Pattern Recognition Letters, 2014, 49: 250-258.
[13] ����, ������. �˻������е�����Ŀ������㷨[J]. �Ϻ���ͨ��ѧѧ��, 2015, 49(8): 1213-1219, 1230.
ZHANG Tie, MA Qiongxiong. Human object tracking algorithm for human-robot interaction[J]. Journal of Shanghai Jiao Tong University, 2015, 49(8): 1213-1219, 1230.
[14] ����, ������. ���ھֲ������������Ŀ�궨λ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2016, 47(9): 3040-3049.
ZHANG Tie, MA Qiongxiong. Target location and tracking based on local background feature points[J]. Journal of Central South University(Science and Technology), 2016, 47(9): 3040-3049.
[15] ҦԶ, ���ֽ�, ���ı�. RGB-Dͼ�����ֲ��������������ʶ��[J]. ��������������ͼ��ѧѧ��, 2013, 25(12): 1810-1817.
YAO Yuan, ZHANG Linjian, QIAO Wenbao. Hand part labeling and gesture recognition from RGB-D data[J]. Journal of Computer-Aided Design & Computer Graphics, 2013, 25(12): 1810-1817.
[16] COLLINE R T. Mean-shift Blob tracking through scale space[C]// IEEE Computer Vision & Pattern Recognition, Madison, USA: IEEE, 2003: 234-240.
[17] NING Jifeng, ZHANG Lei, ZHANG D, et al. Robust object tracking using joint color-texture histogram[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2009, 23(7): 1245-1263.
[18] COMANICIU D, MEER P. Mean shift: a robust approach toward feature space analysis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(5): 603-619.
[19] COMANCIU D, RAMESH V, MEER P. Real-time tracking of non-rigid objects using mean shift[C]//The IEEE Conference on Computer Vision and Pattern Recognition. Washington, USA: IEEE, 2000: 142-149.
���༭ �Կ���
�ո����ڣ� 2018-10-30; �����ڣ� 2019 - 0 2-24
������Ŀ(Foundation item)������Ԥ�л���������Ŀ(51327030104)(Project(51327030104) supported by the National Defense Pre-Research Foundation of China)
ͨ�����ߣ�����������ʿ�����ڣ����¼�����Ӿ����˹����ܡ�ͼ�����о���E-mail��ysdmhj@163.com
ժҪ:���MeanShift�����㷨Ŀ�����ܵ���Χ���Ʊ���������ŵ����⣬����ͼ���RGB-D�������о���ʵ�ֽ��RGB-D��MeanShift��ʵʱĿ������㷨�����ȣ����һ����ӱ�������Զ��������Ż������;���(advanced quadratic-form distance��AQFD)����Σ�������ɫ�������������������Ȩ����������Ӧ�������ƺ�Ŀ��ģ���²��ԣ���Ը��㷨���з������������Jetson TX2ƽ̨ʵ�֡��о���������������㷨��Ŀ���ܵ���Χ���Ʊ������������������ܹ����Ŀ��������������Ƚ��㷨Staple���������õ�ȷ����³���ԣ������ܹ�Ӧ����ʵʱ���١�
[1] ������, �²�, ����, ��. �����Ӿ���Ŀ�������������[J]. �Զ���ѧ��, 2016, 42(10): 1466-1489.
[11] ���ҷ�, éҫ��, �����. ����Mean Shift���Ӿ�Ŀ������㷨����[J]. �������ѧ, 2012, 39(12): 16-24.
[13] ����, ������. �˻������е�����Ŀ������㷨[J]. �Ϻ���ͨ��ѧѧ��, 2015, 49(8): 1213-1219, 1230.
[14] ����, ������. ���ھֲ������������Ŀ�궨λ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2016, 47(9): 3040-3049.
