
�����������ʶ���ƶ������˺������У����
�ڽ�ϼ1, 2, ������1, ��С��1, ������1, 3
(1. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ, ���� ��ɳ, 410083;
2. ����������ѧ �������ѧ�뼼��ѧԺ, ���� ����, 454003;
3. �ع�ѧԺ �������ѧϵ, �㶫 �ع�, 512003)
ժҪ: ������E-Core RD1100�����������ݵ�����������, �������RBF��������Ŵ��㷨ʵ�ֹ�������Ư�����ģ�͵ı�ʶ�� ͨ��ʵ���ý����������ѵ������, ��RBF�������ѵ����, ����˻���Elitist�������Ƶ��Ŵ�����ѵ�������� RBF��������к�ǿ�ľֲ��ƽ�����, ���Ŵ��㷨����������ȫ���������Ż�����, �Ӷ��ܹ���Ч�ض��������ķ�������ʱ���������н�ģ���ʶ�� ʵ��������: �÷�������ȼ����˹������ݵ����, �Ӷ�������ƶ������˵�����λ�ľ��ȡ�
�ؼ���: �ƶ�������; ��������; ���������������; �Ŵ��㷨; ���ž�������
��ͼ�����:TP24 ���ױ�ʶ��:A ���±��: 1672-7207(2005)05-0745-06
Calibration method for heading error of mobile robot based on neural networks identification
YU Jin-xia1, 2, CAI Zi-xing1, ZOU Xiao-bing1, DUAN Zhuo-hua1, 3
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. Institute of Computer Science and Technology, Henan Polytechnic University, Jiaozuo 454003, China;
3. Department of Computer Science, Shaoguan University, Shaoguan 512003, China)
Abstract: The basis of error occurrence of E-Core RD1100 interferometric fiber optic gyros (FOG) was analysed. Radial basis function neural network (RBFNN) and genetic algorithm (GA) were adopted to realize the identification of error model for FOG. The training samples were obtained by experiments and the genetic evolutionary method based on elitist rule was presented for neural network training. RBFNN has a good capacity of local approximation, while GA is efficient in global optimization. So this method can be used to realize the nonlinear and time-varying error modeling and identification. The experimental results show that it can reduce the error of FOG to a great extent and enhance the localization precision of mobile robot navigation.
Key words: mobile robot; fiber optic gyros; radial basis function neural network; genetic algorithm; elitist rule
���ƶ������˶�λ������, ���������Ѿ���Ϊδ֪�������ƶ������˵�����λ����Ҫ����[1]�� ������Ϊ��������Ĺؼ�����, ���ڲ����ƶ������˵ĺ����, ���������ںܴ�̶���ֱ��Ӱ�����ƶ������˺���ľ���[2, 3]�� ������, ��������(FOG)����DZ�ڵ����ƺ�Ӧ��ǰ������������, �㷺Ӧ�����ƶ������˵�������ϵͳ��[4, 5]��
����, �������ݴ����ۻ�Ư�����, ���ܻ�����Ӱ��ܴ�, ���ģ�;���ʱ����[5, 6]�� ���, ���ڹ������ݵ�Ư�Ƹ��ƶ���������ɵĺ��������Ҫ��ȷ��ʶ��������ЧУ���� ���������ڹ�������Ư��������������У���о�������, �������RBF��������Ŵ��㷨�������Ľ���������ʵ�ֹ�������Ư�����ģ�͵ı�ʶ, ���������ƶ������˺���������У���� RBF�������к�ǿ�ľֲ��ƽ�����[7, 8], ���Ŵ��㷨����������ȫ���������Ż�����[9, 10], �Ӷ��ܹ���Ч�ض����ݵ������н�ģ���ʶ�� ��RBF�������ѵ����, �������Elitist�������ƵĽ���ѵ������, ���нϿ������Ч�ʡ� ͨ��ʵ��, ֤���÷������Դ���ȼ��ٹ������ݵ����, �Ӷ�����ƶ������˵�����λ�ľ��ȡ�
1 ������������������
1.1 ������
��������Ư�ƵIJ���ԭ��Ƚϸ���, ��������ʿ��Է�Ϊ���Ư�ƺ���Ư; ������ԭ����Է�Ϊ���ⲿ����(���¶ȱ仯�� ������ת)���ڲ�����(��Ԫ�����IJ���Ư�ơ� ��������)�ֱ���������; �����ܲ������ְ�����Ư�� ������������Զȡ� �Ƕ�������ߡ� ���������ȡ� ��ɹ�������Ư�����ӵ�ԭ���Ǹ��������������Ӱ�졣 ʵ���в��õ�E-Core RD1100��������ٶ������ǵ�����ø�������Ĺ����ٶȴ�����[11]�� ͼ1��ʾΪδ���κ�У���ľ�̬E-Core RD1100�������������ԭʼ��������, ��ͼ1���Կ��������ʱ仯���Ǻ�����, ���Ƕ�ȴ��50 min��Ư����150��, �����ɸ��ƶ������˵Ķ�λ�͵������������ѡ� ͨ�����۷�����ʵ��, ���ֹ������ݶ��ƶ������˺��������������Ӱ��������ҪΪ:
a. ��Ư;
b. ��������ķ����Զ�;
c. �����¶������ϵͳ��ʱ�����ԡ�
1.2 ������
1.2.1 ��Ư
��Ư����������ת������Ϊ��ʱ, ���������Χ�����ֵ����ɢ�̶ȡ� ��Ư�����ݵĹ������, ����ͨ��������ƽ���� һ�ֳ��õIJ��������������ݴ��ھ�ֹû�����κι���֮ǰ�ռ�һЩ��ֹ���������Ư������(����10~20 s), ������ǵ�ƽ��ֵ��Ϊ��Ư, ���к���IJ���ʱ�Ӷ����м�ȥ��ƫ��ֵ��
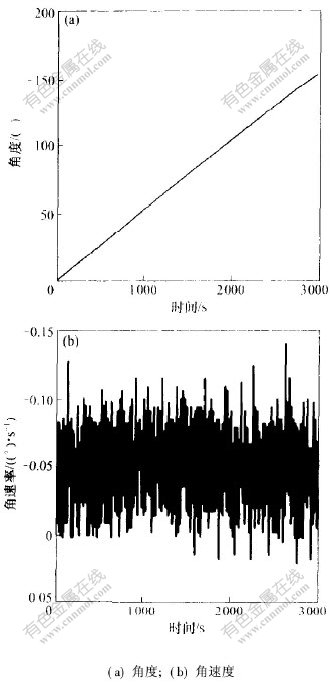
ͼ 1 δ��У����FOG�ǶȺͽ������������(�¶�: 28.20~34.40 ��)
Fig. 1 Output of angle and angular rate of FOG without any calibration
1.2.2 ������������Զ�
������������Զ�(��ƿ̶��������)��ָ����������ʷ�Χ��, ������������������С���˷����ֱ�ߵ����ƫ��ֵ����������֮�ȡ� ͨ��KVH��˾�ṩ��E-Core RD1100�������ݵ����ܲ�������, �Լ������ڵ��ת̨������ٶ�Ϊ-25~+25 (��)/s֮��ı�����������ԶȽ��в��ԡ� �������, ���ת̨������ٶ�Ϊ-25~+25 (��)/sʱ, RD1100�������ݵı�����������Զȷdz�С�� ��˵��������������Զȶ������Ƶ��ƶ������˵ĺ���Ӱ�첻��
1.2.3 ����Ӱ������
ͨ���о�����, ���ڹ������ݵ����ݲ�������Ϊ0.1 s, ϵͳ����������ͨѶ������Ҫ0.1 s, �����ƶ������˵�ǰ��õĹ�����������ʵ������0.2 sǰ�ĺ���Ƕȡ� Ҳ����˵, �ƶ�������ϵͳ����0.2 s��ʱ�͡� Ϊ�˽����һ����, �����˶�̬ϵͳ�Ħ�-���˲���״̬Ԥ�ⷽ�̶��ƶ�ϵͳ������ϵͳ����״̬������ �����˼��μ�����[12]��
ͨ�����Ϸ���������У��, �ڻ����¶ȱȽ��ȶ��������, ���������ݵĽǶ�Ư�ƿ�����15~26 (��)/h�� ����, ���ڹ�������ʹ�õ�ʵʱ�ԺͶԻ����¶ȱ仯��������, ʹ���ƶ����������ù������ݽ��к�������ʱ��Ȼ���ɱ���ش��ں�����
2 �������ʶ����
����������ͺܶ�, ����RBF��������б�ĿǰӦ�ýϹ㷺��BP�������ǿ�ıƽ���������������ٶ�, ����ѡ��RBF��������ʵ�ֹ�������Ư�����ķ����Ա�ʶ�� ����RBF���������������Ԫ�����������Ʋ����϶�, ��ͳ��ѧϰ�㷨����ֱ�Ӷ���Щ�ڶ����������Ч�ع��ơ� ����GA���ڷ������������ʹ�Χ�ռ�����������ص�����, ����ѡ��GA��ȷ������Ľṹ�Ͳ�����
2.1 RBF������ģ��
RBF����������ǰ������������, ������㡢 ������������3����ɡ� ����n�������һ�������RBF��������ͼ2��ʾ, ��������Ϊnάʸ��X:
X=[x1,x2,��,xn]T��
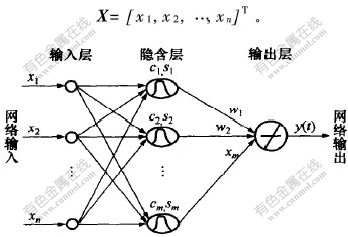
ͼ 2 RBF������Ľṹͼ
Fig. 2 Structure of RBFNN
ѡ�ø�˹������Ϊ���������, ���j�����ڵ��������ʸ��X�ľ��������Ϊ
![]()
����: cj=(cj1, cj2, ��, cjn), ���������j�����������������ʸ��; ��j=(��j1, ��j2, ��, ��jn)���������j����Ԫ�Ĺ�һ������, ����ȷ���������j����Ԫ��������ʸ��X֮�������Ӧ���������; j =1, 2, ��, m(mΪ��������Ԫ����)�� ����������Ϊ
![]()
����: wj���������j����Ԫ�ڵ㵽����������Ȩֵ�� ��ʽ(2)�ɼ�, RBF��������ͨ�������Ի��������������ʵ�ִ�Rn��Rm�ķ�����Ӱ�䡣
2.2 �����Ŵ��㷨������ѵ��
RBF������ѵ���Ĺؼ��Ǹ��ݸ���ѵ������, ������Ч��ȷ�����������������λ�á� ���Ⱥ������Ȩֵ���йز����Ĺ��ơ� �Ŵ��㷨��ģ������Ľ�������, �������ɵļ���ʱ��, �����Ŵ����Ӷ�Ⱥ���Ż�, ͬʱ��ȫ�ֲ������������������Ż�Ⱥ���е����Ÿ���, ���������Ҫ������Ž�����Ž�{13-15]�� ���ǻ������ž������Ƶĸ��������㷨�� �����Ŵ��㷨�Ż�RBF������ʱ, һ����Ҫ����, ȷ����Ⱥ��ģ, ȷ����Ӧ�Ⱥ���, ѡ�����, �������, ��������Լ�ȷ����ֹ�����ȼ���������ʵ�֡� ������㷨���¡�
2.2.1 ����
�Ŵ��㷨���볣�õ��ж����Ʊ����ʵ�����롣 �������ʵ������, �Ա�����ö����Ʊ���ʱ, �����Ĺ��Ʋ����������ֺܳ�, �Ӷ��뾫��Ҫ����ì�ܵ����⡣ RBF������Ľṹ�����������������������λ��cji�� ���Ȧ�ji�������Ȩֵwj�ȡ� ����: i=1, 2, ��, n; j =1, 2, ��, m, �����Ʋ�������Ϊ2mn+m�� ����G������Ϊ:
G��={(w1, ��, wm, c11, ��, c1n, cm1, ��, cmn,
��11, ��, ��1n, ��m1, ��, ��mn}|wj, cji, ��ji��R;
i=1, 2, ��, n; j=1, 2, ��, m}
2.2.2 ��Ⱥ��ģ
��Ⱥ�Ĺ�ģֱ��Ӱ���Ŵ��㷨�����ս���Լ��㷨��ִ��Ч�ʡ� ����Ⱥ̫С, ����������ֲ����Ž�, �Ż�Ч������; ������Ⱥ̫��, ����㸴�Ӷ����, ��������⡣ ���ݾ���, ����ȡ��Ⱥ��ģΪPsize=10, ����P={G<sub>��k|k=1, 2, ��, Psize}��
2.2.3 ��Ӧ�Ⱥ���
��Ӧ�Ⱥ������㷨�Ը���G�����û��������۱�, ȡֵΪ���� �������RBF�������Ŀ�꺯����Ϊ��Ӧ�Ⱥ���, ��

����: xk(t)Ϊ�������ݵ�ʵ�����ֵ; yk(t)Ϊ�������Ԥ�����ֵ; NsizeΪѵ������������
2.2.4 ����
�Գ�ʼ��Ⱥ�и�����Ӧ�Ⱥ���ѡ�γ��������Ÿ�����Ϊ��ʤ��, ����Ωһ������Ⱥ���������彻���Ȩ��; �²����ĸ�������ʤ�߾���, ʧ��һ����Ϊ��ͨ���塣
2.2.5 �Ŵ�����
����ѡ��, ����ͱ��졣 ѡ����ָ��ͨ���尴������Ӧ�Ⱥ���������ĸ�����̭, ��������������¸���ȡ��, ��ά��ԭ�е���Ⱥ��ģ�� ����G��������̭�ĸ���Ϊ
������õ��㽻�淽ʽ, ����ȵĸ���(0.5)����ǰ�����档 1�ν���ֻ����1���������, ���øø����滻��Ӧ�Ƚϵ͵�1���������塣 ������ð�λ���졣 ����������2������: һ���Ǹ���ı����뵱ǰ��ʤ�߱�����ͬʱ, ͨ������, �����㷨����; ��һ������ͨ������0.2�ĸ��ʽ��б��졣
�������ž������Ƶ��Ŵ��㷨����ͼ��ͼ3��ʾ�� ��Ⱥ�и�������Ϊ11��, ����10��Ϊ��ͨ����, 1��Ϊͨ�����ž�����ѡ��������ʤ�߸��塣 ������40��ѭ��û���ܹ������µ����Ÿ���ʱ, �����㷨��
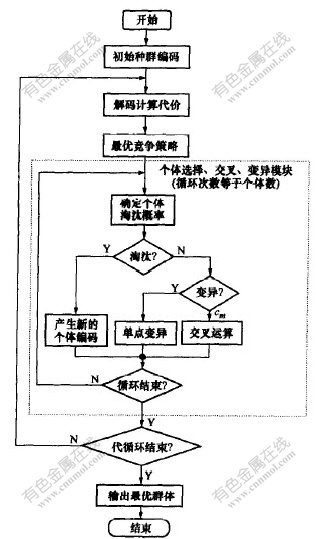
ͼ 3 �������ž������Ƶ�GA����ͼ
Fig. 3 Flow chart of GA based on elitist rule
3 ʵ�鷽������
3.1 ʵ�鷽��
Ϊ��ʵ�ֹ�������Ư�Ƶ�����, ���������ݵ������������Ϊ�����������, ��ȡ���ת̨����ת��������Ϊ�ο����, �Բ�ͬ�¶Ȳ�ͬ��ת�������¹������ݵ�������в����� ���Ե綯ת̨��ת���ٶ���-25~25 (��)/s��Χ����5 (��)/s�ļ����Ϊ1��������, �����ϵ��ӻ����¶���������1���ȶ��¶�, ͨ���ı����ݹ��������¶�, ����¶ȱ仯��ΧΪ10~40 �������, ����ѡȡ�¶ȱ仯���Ϊ0.1 ���100������֮����Ϊѵ������, �Ӷ�����������ѵ���������� �����Ŵ��㷨��RBF���������ѵ��, ����RBF������IJ���, ʹRBF������������ѵ���������IJο����֮��������С�� ��ѵ����ɺ�, ����RBF�����������õķ�������(�����в�ֵ����), ϵͳ�������øý�����������в����� Ϊ�˼���ѵ���õ�������������Ⱥ��ݴ�����, �����������Ƶ��ƶ���������������������Ԥ�ⲹ��Ĺ������ݽ���У�顣
3.2 ʵ��������
ѵ������������ָ��Ϊ���ƽ����(sum-squared error), ͼ4��ʾΪRBF�������ѵ������� ��ѵ��������Կ���, �����Ŵ��㷨ѵ��RBF��������нϺõ�����Ч���� ����261�����Ż���, ����Ѿ��������㹻С��
������, �ø������粹��ǰ, �¶���10 ��仯��45 ��, �������ݽ�����������¶�֮����ֳ�һ���̶ȵķ����ԡ� ���ݵ�Ư�Ʊ仯��15~26 (��)/h, �������в���, �����ƶ������˵ĵ�����λ�������ܴ���� �����������粹����, ��ͬ���IJ���������, ���ݵ�Ư�Ʊ仯������3~6 (��)/h, �Ѿ��ӽ��ڸù�˾�ṩ���ں��������¸ò�Ʒ�IJ��������(2~4 (��)/h)�� ͼ5��ʾΪӦ��ѵ���õ�������Բ�ͬ�¶ȶ��µĹ���������1 h�ڵ�Ư�������в����Ľ���� ��Ȼ, ��������Ϻõػ���˹������ݵ�������¶�֮����ϵ��֪ʶ, ����������н�ǿ��ѧϰ�ͷ��������� ����������Թ������ݵ��¶����ж����Խ��в���, ����ȵؼ����˻����¶ȱ仯�¹������ݵ�Ư��, Ϊʵ���ƶ�������ȷ�ĺ�������춨�˻�����
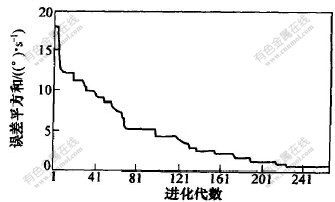
ͼ 4 RBFNN��ѵ�����
Fig. 4 Training results of RBFNN

ͼ 5 ��ͬ�¶��½���������У����Ĺ������ݵ����
Fig. 5 Output of FOG with evolutionary neural network calibration at different temperatures
4 �� ��
�ڹ�������������������У���о�������, �������RBF��������Ŵ��㷨�������Ľ���������ʵ�ֹ�������Ư�����ģ�͵ı�ʶ, �������˹������ݵ��ȶ��ԺͿ���������, �Ӷ������˹������ݵ����Ӱ��, ������ƶ������˵����Ķ�λ���ȡ� ͨ��ʵ��, ֤����Ӧ������������RBF��������ԺܺõضԹ�������Ư������ɵ��ƶ������˺���������У����
�����:
[1]������, �غ���, �º�. δ֪�������ƶ������˵��������о�����������[J]. ���������, 2002, 17(4): 385-390, 464.
CAI Zi-xing, HE Han-gen, CHEN Hong. Some issues for mobile robot navigation under unknown environments[J]. Control and Decision, 2002: 17(4): 385-390, 464.
[2]Barshan B, Durrant-Whyte H F. Inertial navigation systems for mobile robots[J]. IEEE Transactions on Robotics and Automation, 1995, 11(3): 328-342.
[3]Borenstein J. Experimental evaluation of a fiber optics gyroscope for improving dead-reckoning accuracy in mobile robots[A]. IEEE International Conference on Robotics and Automation[C]. Leuven: IEEE, 1998. 3456-3461.
[4]Bennett S M, Emge S, Dyott R. Fiber optic gyros for robotics[J]. American Institute of Aeronautics & Astronautics, 1998, 44(1): 1315-1321.
[5]Chung H, Ojeda L, Borenstein J. Accurate mobile robot dead-reckoning with a precision-calibrated fiber optic gyroscope[J]. IEEE Transaction on Robotics and Automation, 2001, 17(1): 80-84.
[6]����. ���ƶ������˶�λ�й��������ǵ��������뽨ģ[D]. ��ɳ: ���ϴ�ѧ��Ϣ��ѧ�빤��ѧԺ, 2004.
ZHU Guang-hui. Analysis and Modelling of FOG��s Drift in Mobile Robot��s Localization[D]. Changsha: School of Information Science and Engineering, Central South University, 2004.
[7]����ǿ, ������. һ�ֻ��ڲ����Ŵ��㷨�ķ�����ϵͳ��ʶ����[J]. ���������, 2003, 18(3): 368-370.
MENG Zu-qiang, CAI Zi-xing. Identification method of nonlinear systems based on parallel genetic Algorithm[J]. Control and Decision, 2003, 18(3): 368-370.
[8]Amir F A, Samir I S. A comparison between neural network forecasting techniques-case study: river flow forecasting[J]. IEEE Transactions on Neural Networks, 1999, 10(2): 402-409.
[9]��Ӣ, ����, ��佳�. һ�ֻ����ݻ��������Ԥ���㷨[J]. Ԥ��, 2003, 22(6): 66-69.
LI Ying, LI Wu, WANG Huan-chen. A forecasting algorithm based on evolutionary neural network[J]. Forecasting, 2003, 22(6): 66-69.
[10]��Сƽ, ������. �Ŵ��㷨�����ۡ� Ӧ��������ʵ��[M]. ����: ������ͨ��ѧ������, 2002.
WANG Xiao-ping, CAO Li-ming. Genetic Algorithm-theory, Application and Software Realization[M]. Xi��an: Xi��an Jiaotong University Press, 2002.
[11]KVH Industries Inc. Core 1000 Fiber Optic Gyro Technical Manual[R]. Middletown: KVH Industries Inc, 1999.
[12]����, ������, ½������, ��. �ഫ������Ϣ�ںϼ�Ӧ��[M]. ����: ���ӹ�ҵ������, 2000.
HE You, WANG Guo-hong, LU Da-jin, et al. Multisensor Information Fusion with Applications[M]. Beijing: Electronics Industry Press, 2000.
[13]֣ا��, ����. ����RBF����ĵݽ��Ŵ�ѵ���·���[J]. ���������, 2000, 15(2): 165-168.
ZHENG Pi-e, MA Yan-hua. A new hierarchical geneti algorithm for training of RBF neural networks[J]. Control and Decision, 2000, 15(2): 165-168.
[14]��С��, ������. ���ڴ�������Ϣ�Ļ����ǹ⻬��ģ��·���滮[J]. ��Ȼ��ѧ��չ, 2002, 12(11): 1188-1192.
ZOU Xiao-bin, CAI Zi-xing. Non-smooth environment modeling and global path planning based on the sensory information[J]. Progress in Natural Science, 2002, 12(11): 1188-1192.
[15]������, �γ�һ, ������, ��. RBF�������ѵ�����������[J]. ���ɹ������ѧѧ��, 2003, 18(4): 301-303.
JIANG Jing-qing, SONG Chu-yi, LIU Na-ren, et al. Training method of RBF neural network and its analysis[J]. Journal of Inner Mongolia University for Nationalities, 2003, 18(4): 301-303.
�ո�����:2005-01-28
������Ŀ:������Ȼ��ѧ����������Ŀ(60234030)
�����:�ڽ�ϼ(1974-), Ů, ���Ͻ�����, ��ʿ�о���, �������ܿ��ơ� �ƶ������˶�λ�뻷����ģ���о�
������ϵ��: �ڽ�ϼ, Ů, ��ʿ�о���; �绰: 0731-2655993(O); E-mail: melissa2002@163.com
[6]����. ���ƶ������˶�λ�й��������ǵ��������뽨ģ[D]. ��ɳ: ���ϴ�ѧ��Ϣ��ѧ�빤��ѧԺ, 2004.
[7]����ǿ, ������. һ�ֻ��ڲ����Ŵ��㷨�ķ�����ϵͳ��ʶ����[J]. ���������, 2003, 18(3): 368-370.
[9]��Ӣ, ����, ��佳�. һ�ֻ����ݻ��������Ԥ���㷨[J]. Ԥ��, 2003, 22(6): 66-69.
[10]��Сƽ, ������. �Ŵ��㷨�����ۡ� Ӧ��������ʵ��[M]. ����: ������ͨ��ѧ������, 2002.
[12]����, ������, ½������, ��. �ഫ������Ϣ�ںϼ�Ӧ��[M]. ����: ���ӹ�ҵ������, 2000.
[13]֣ا��, ����. ����RBF����ĵݽ��Ŵ�ѵ���·���[J]. ���������, 2000, 15(2): 165-168.
[14]��С��, ������. ���ڴ�������Ϣ�Ļ����ǹ⻬��ģ��·���滮[J]. ��Ȼ��ѧ��չ, 2002, 12(11): 1188-1192.
[15]������, �γ�һ, ������, ��. RBF�������ѵ�����������[J]. ���ɹ������ѧѧ��, 2003, 18(4): 301-303.
