
�װ��Ͻ��ػ�ǣ��ϵͳ����ʻ���Է���
���ܽ������첩��������
(���������̴�ѧ ���繤��ѧԺ�������� ��������150001)
ժ Ҫ��
��ǣ��ϵͳ����ʻ���Խ��з�����������ǽ�����ҡ����ҡ�ʹ���3�����ɶȵ�����˶���ǣ��ϵͳ�����Ĺ����������������ɶ�ʱ�䡢������ǣ����-�ɻ�ϵͳ����ѧģ�͡�����Matlab/Simulink�Լ�����ϵͳ����ѧ�������о��װ���ǣ��ϵͳ����ʻ���Ի���������ǣ��ϵͳ�ڲ�ͬ����������״������ʻ�ٶȵ������µı������������۷����ͷ����������������Լ�������Ӱ�콢�ػ�ǣ��ϵͳ��ʻ���Ե���Ҫ���ء���ϵͳ�Բ�ͬ�ٶ���ʻʱ�ܹ��ܿ�شﵽ�ȶ�״̬����ʹ�ڲ���Ŷ����Ա��ֳ����õIJ����ȶ��ԡ�
�ؼ��ʣ�
���ػ���ǣ���˶���ǣ����������ѧģ������ʻ������
��ͼ����ţ�TP391.9��V351.34 ���ױ�־�룺A ���±�ţ�1672-7207(2013)06-2304-07
Moving characteristics analysis of carrier-based aircraft traction system on deck
WANG Nengjian, LIU Hongbo, ZHOU Lijie
(College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China)
Abstract: To study on the moving characteristics of a tractor-aircraft system, considering the inertial force on the aircraft traction system produced by coupled roll-pitch-heave motion of ship, a time varying, nonlinear 3DOF tractor-aircraft system dynamic model was established. By means of the control software MATLAB/Simulink and the multi-body dynamics software, the inspection of mechanism of the tractor-aircraft moving behavior on deck was researched and the main experimental characteristics of expression in various marine environment, different load status and running speeds were recounted. Investigation of the carrier-based aircraft towed moving performance shows the influence factors of the tractor-aircraft system. Theoretical verification and experimental results indicate that the first two factors significantly influence the moving performance of the tractor-aircraft system. Responses of system to running speeds regain steady-state quickly. Traction system performs well in handling stability even with crosswind disturbance.
Key words: carrier-based aircraft; traction motion; tractor; dynamic model; moving characteristic
����ǣ���������ú;����ϵķ��ٷ�չ����ǣ������ȫ�Ե�Ҫ��Ҳ�������ߡ��밶���ɻ�������ҵ��ͬ������Ӧ���½����ɻ�������ҵ���Ż�����ռ���խ��������ʩ������ص�[1-3]�����ػ��ӻ�����мװ����վλ�����վλ�ĵ�����ҵ�ںܴ�̶���Ӱ���Ž��ػ������Ӷ���������ս�������γɺ���ߡ�Ϊ�˱�֤ǣ��������խӵ���ij�������ҵ��ȫ��Ҫ������нϺõ���ʻ���ԡ������ڴ����ܺ���Ӱ�����ҡ�ڣ�ʹ���ػ�ǣ��ϵͳ���׳���ʧ��״�������Ը���Ҫע������ʻ���ܵ����⡣Ŀǰ���ڷɻ��ڽ����ϵ��о�����ɺ���½�Ķ���ѧ����Ϊ��[4-7]������ǣ���˶��ķ���Ҳ����½��Ϊ��ҵ����[8-12]������������Խ��ػ��и�ǣ��ϵͳ�ڽ���ҡ���µĵ����ص㣬���������ҡ����ҡ�����������ɶ�����˶�ģ�ͺͽ��ػ�ǣ��ϵͳ�Ķ���ѧģ�ͣ������װ���ǣ��ϵͳ����ʻ���Լ�����Ҫ��Ӱ�����ء�
1 �װ��Ͻ��ػ�ǣ��ϵͳ����ѧģ��
1.1 �����
��ͼ1��ʾ��ǣ�������ù�����������ʦЭ���ƶ��ij���������ϵoxyz�����ػ��˶�����ϵ����ŷ������ϵ�������˶�����ϵ�����촬���ֻ�����ѧ�����﹫���Ƽ�����ϵ[13]��
������������ϵogxgygzg�����ο�����ϵosxsyszs������˶�����ϵoixiyizi������os�Ƕ��������ģ�oi�Ǹ��������[14]��
ǣ���������ػ�������˶�����Ϊ���ο�����ϵosxsyszs����ڸ����˶�����ϵoixiyizi�IJ����˶��ͺ���˶���
���������Զ������ٶ�Vbi�����ٶȦ�bi��������������ϵoixiyizi�е�ͶӰ�ֱ�Ϊ
 (1)
(1)
 (2)
(2)
���У�rbiΪ�����˶�����ϵԭ����ڶ�������ϵ��ʸ�����ڶ�������ϵ�е�ͶӰΪrbi=[rbix rbiy rbiz]T��
����������˶�ѧ����Ϊ
 (3)
(3)
���У�AisΪ�����ٶ�����������ϵ��ͶӰ�����λ�˵����������任����TisΪ������ٶ���������������ϵ��ͶӰ�������̬�ǵ�����Ľ��ٶȱ任����Ais��Tis�ľ������ʽΪ

 (4)
(4)
 (5)
(5)
ʽ�У�s��ʾsin��c��ʾcos������ͬ��
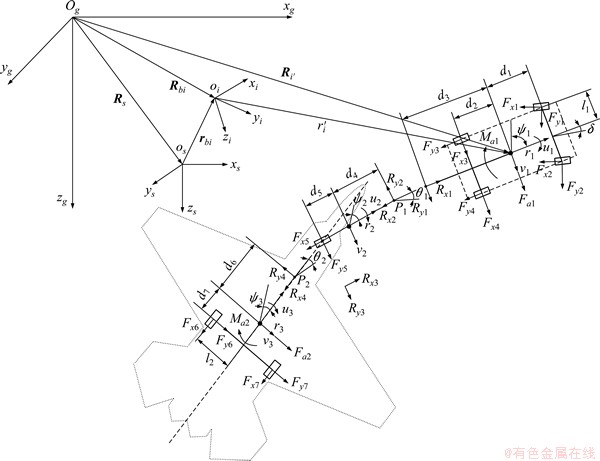
ͼ1 ���ػ�ǣ��ϵͳģ��
Fig. 1 Model of carrier-based aircraft traction system
1.2 �����˶�ģ��
�ڽ���ʵ�ʺ��й����У�ҡ���˶����ø����ڿռ�Ĵ������ᵴ���ݵ�����ҡ����ҡ����ҡ��6�����ɶ������������У�ֻ�к�ҡ����ҡ�ʹ������лָ���(��)���Ƶ�����ȫ�����˶�����Σ��Ҳ�Ƚϴ���ͨ�����뻯�����Ҳ���ģ�⽢����ҡ����ҡ�ʹ������˶����ɣ�
 (6)
(6)
ʽ�У���0����0��Z0�ֱ�Ϊ��ҡ����ҡ�������ķ�ֵ��T����T����Tz�ֱ�Ϊ��ҡ����ҡ�����������ڣ������������ͦ�z�ֱ�Ϊ��ҡ����ҡ�������ij�ʼ��λ�ǡ�
�����Ľ��ٶȡ��Ǽ��ٶ��ڽ�������ϵ�еı���ʽΪ
 (7)
(7)
 (8)
(8)
�������ٶȡ����ٶ��ڽ�������ϵ�еı���ʽΪ
 (9)
(9)
 (10)
(10)
���У�����任����Asg�ͽ��ٶȱ任����Tsgͬʽ(4)��(5)��
1.3 ǣ��ϵͳ����ѧ���˶�ѧģ��
���裺(1) ������֮�����Լнǽ�С��ǣ����ǰ��ת�ǽ�С��(2) ������ǣ�������ܡ��ɻ�����ܻ���ϵͳ�ĵ������ã����ֵĹ������������������Լ����������Ⱥ��Բ��ơ�
��ǣ��ϵͳ�����ֵĶ���ѧ���̺��˶�ѧ���̳��������ͳһ����ʽ��
 (11)
(11)
ʽ�У�Rbix��RbiyΪϵͳ��������Դ����λ�ã���iΪϵͳ��������Խ����װ�ƽ�����ת�Ƕȣ�Fiy��Miz�ֱ�Ϊǣ�����ͽ��ػ���̥�ܵ��IJ������Լ����������������أ� ��
�� �ֱ�Ϊϵͳ�������ܵ��IJ���Լ�����Լ�����Լ�������������أ�
�ֱ�Ϊϵͳ�������ܵ��IJ���Լ�����Լ�����Լ�������������أ� ��
�� �ֱ�Ϊϵͳ�������ܵ��Ĺ�������������������ز��������GiyΪϵͳ�������ܵ��������������(i=1�� 2��3)��
�ֱ�Ϊϵͳ�������ܵ��Ĺ�������������������ز��������GiyΪϵͳ�������ܵ��������������(i=1�� 2��3)��
���������������������ز�������ı���ʽΪ��
 (12)
(12)
 (13)
(13)


 (14)
(14)
ʽ�У�



2 ����ҡ��״̬��ǣ��ϵͳ��ʻ����
ǣ��ϵͳ�ڽ���ҡ��״̬���뽢��ƽ��״̬����Ⱦ��в�ͬ����ʻ���ԡ�Ӧ�ö���ϵͳ����ѧ�������з���ʵ�飬�趨ijǣ������5.4 km/h���ٶ�ǣ�����ػ��������̽ǽ�Ծ���뺯��Ϊstep(time��0��0��1��42 d)����������ͼ2��ʾ��
��1�ͱ�2������ǣ��ϵͳλ�˺�ǣ�������Բ�ֵ�Ա������
�ڹ̶���ת��ǽ�Ծ��������£����Ž���ҡ�ڷ��������������̣�ǣ��ϵͳ���ֳ�������ʻ���ԣ�
(1) ǣ���������ػ��ĺ�ڽ��ٶȡ������ٶ�������ǣ�����ͽ��ػ�����ʻ����Խ���ܵ�Ӱ�죻
(2) ǣ����ǣ������ǰ����ת����ֵ�IJ���������ҡ�ڳ̶����������������ǣ������������ǰ����ܹ�ת������⣻
(3) ����ҡ�ڸı���ǣ���������ػ��Ķ���ѧ������ʹ�����й켣����ƫ�������ǣ�����ͽ��ػ��������ơ���ײ�����⡣

ͼ2 ��ͬ�����µķ�����
Fig. 2 Simulation results on varying sea states
��1 ǣ��ϵͳ�ٶȺͽ��ٶȾ��Բ�ֵͳ��
Table 1 Absolute difference statistics of traction system velocity and angular rate
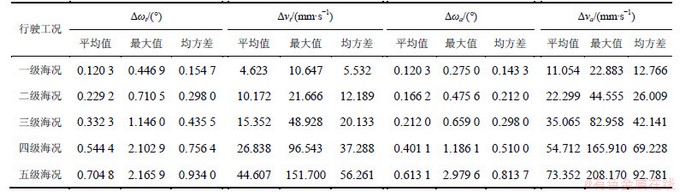
��2 ǣ��ϵͳλ�˺�ǣ�������Բ�ֵͳ��
Table 2 Absolute difference statistics of traction system pose and traction force
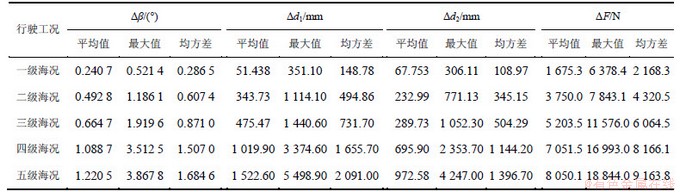
��ʱ���λ�˱仯��ǣ�����ͽ��ػ��ܵ����ϸı�Ĺ��������������ء������������ã�ֱ��Ӱ��ǣ�����ͽ��ػ��ٶȡ����ٶȱ仯���������̥ģ�����ۿ�֪�����������������ء����������ı仯��������̥�����غɵı仯��ʹǣ�����ͽ��ػ���̥�ܵ��IJ�����������������Ӱ�졣
3 ����״����ǣ���ٶȶ���ʻ���Ե�Ӱ��
3.1 ����״������ʻ���Ե�Ӱ��
�װ���ǣ�����п�����ʻ��ǣ�����ػ���ʻ2������״���������˷ɻ����п��غ���ҵ���������ȸ�������2��״����2��״�������������7 t��
3.1.1 ����״����ǣ������ʻ���Ե�Ӱ��
�趨ǣ���������ߺͽ���������ƽ��ʱ��ǣ������ת�Ƕ�Ϊ0�㣬˳ʱ����תΪ����ǣ�����ֱ������ʻ��ǣ�����ػ���ʻ����ͼ3��֪����Կ���ǣ����������ǣ�����IJ����ٶȡ���ڽ��ٶ���ֵ�仯����Ҫ������ʻ�켣�����ϴ�ƫ�롣����ҡ�ڶ������ĸ�������ͨ��ǣ���˴��ݸ�ǣ������ʹǣ�����ķ�ӳ�ٶȱ������ٶȺͽ��ٶȲ�����Χ�����ڽ���ҡ�ڵĸ��������£�����״̬��ǣ�����IJ����ȶ��Ա���ʻ��ȫ�Խ��͡�
3.1.2 ����״���Խ��ػ���ʻ���Ե�Ӱ��
һ������£�����������ķɻ���ǣ����ҵ�����������ܵ�����ҡ��Ӱ�죬�����ȶ��Ա���ʻ��ȫ�Խ��͡��ɷ�����ͼ4��֪������طɻ���ȣ�������������Ľ��ػ��IJ����ٶȺͺ�ڽ��ٶȱ仯���Ƚϴ�����ʻ·�������ϴ�仯��
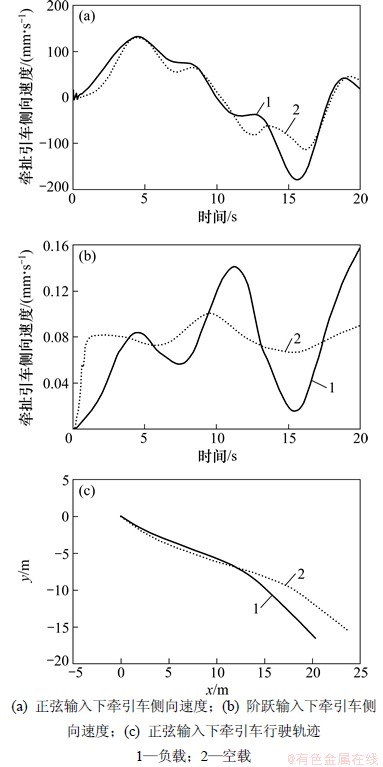
ͼ3 ����״����ǣ������ʻ���Ե�Ӱ��
Fig. 3 Effects of load status on tractor moving characteristic
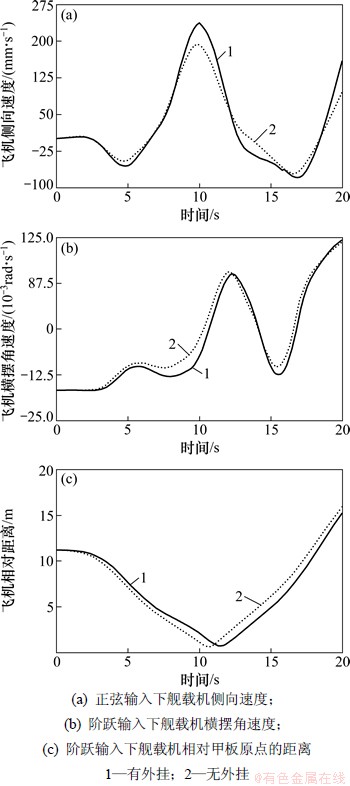
ͼ4 ����״���Խ��ػ���ʻ���Ե�Ӱ��
Fig. 4 Effects of load status on aircraft moving characteristic
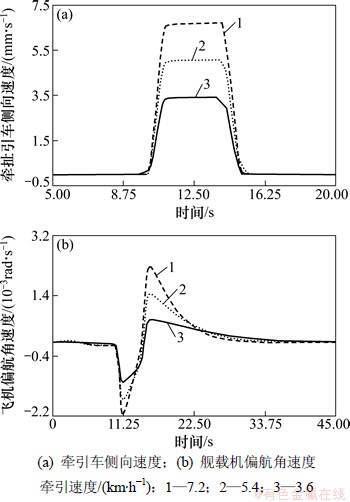
3.2 ǣ���ٶȶ���ʻ���Ե�Ӱ��
ǣ�����ֱ���3.6��5.4��7.2 km/h���ٶ���ֱ��ǣ�������ܵ�����IJ�������ĸ��ţ�����ʱ��Ϊ5 s���������ȡΪ0 m/s(����)��20 m/s(���)����ѹ���ķֱ���ǣ�������ġ����ػ������غϡ�
ǣ�����ͽ��ػ����ܲ�������ļ��㹫ʽΪ
 (15)
(15)
ʽ�У���Ϊ�����ܶȣ���=1.3 kg/m3��AiΪǣ������ɻ��IJ��������CiΪ����������ϵ����Ci=0.9��ViΪ����ٶȣ�m/s���±�i�ֱ����ǣ������ɻ���i=1��2��
���������������ʽΪstep(time��t1��0��t2��-Fwi)+step(time��t3��0��t4��Fwi)�������ڴ��������ǣ�����ܵ��IJ������Fw1Ϊ3 520 N���ɻ��ܵ��IJ������Fw2Ϊ17 550 N��
��ͬǣ���ٶ���ǣ�����IJ����ٶ���Ӧ�Լ����ػ���ƫ�����ٶ���Ӧ��ͼ5��ʾ����ͼ5��֪����ֱ����ʻ�����£���ʩ�Ӳ������ʱ�������ٶȺͺ�ڽ��ٶȻ�������ӵ�һ����ֵ�������������ʧ�����ٶȺͺ�ڽ��ٶ��ָֻ�����ֵ��˵��ǣ��ϵͳ�������õIJ����ȶ��ԣ��ڲ�ͬ����ʻ�ٶ��£�ǣ���������ػ��IJ����ٶȡ���ڽ��ٶȶԲ�������ĸ���������Ӧ��ͬ���ٶ�Խ�ߣ������ٶȺͺ�ڽ��ٶȵı仯����Խ��ǣ��ϵͳ����ʻ�ȶ��Խ��͡�
������������ϵͳ��ҡ�ڽ�����ͬ���ٶ���ʻ��ǣ�����ͽ��ػ���ʼ����Ϊ45�㣬ǣ����������ת�DZ���0�㣬��������ͼ6��ʾ���ڶ��ݲ��������ú�ǣ�����ͽ��ػ��IJ����ٶȡ���ڽ��ٶ�������������ʱ�ķ����������غϣ�ǣ��ϵͳ���нϺõIJ����ȶ��ԡ�
ͼ5 �����������ϵͳ����Ӧ
Fig. 5 Response curves of system to crosswind applied force
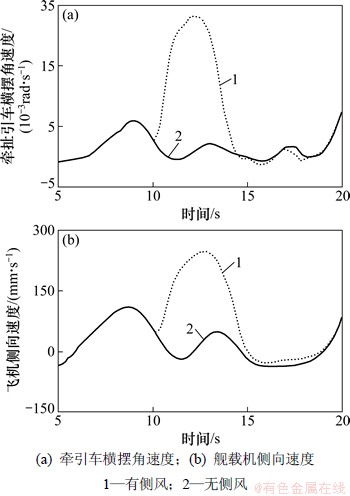
ͼ6 ������������ϵͳ��ʻ����
Fig. 6 Moving characteristic with crosswind interfere
4 ����
(1) ��Խ���ҡ������������ͨ����ѧ��ģ�о��˼װ���ǣ��ϵͳ��ʻ���Ե��γɻ�����
(2) ���ݷ��������ߣ�������ҡ��״̬�µĶ���ѧ������ƽ��״̬�¶���ѧ���������ľ��Բ�ֵ��Ϊ����ָ�꣬�����˺����ȼ�������״������ʻ�ٶȡ�������������ض�ǣ�����ͽ��ػ���ʻ״����Ӱ�졣Ϊ�Ľ���ʻ״̬�ṩ���������ݺͷ���Ϊ�о�ǣ��ϵͳ�����ȶ����ṩ�˲ο��ͽ����
�ο����ף�
[1] ����, �����, ������, ��. ���ػ�������ҵ�����Ż��о�[J]. ��ѧ�����빤��, 2010, 10(22): 5602-5605.
HAN Feng, YANG Bingheng, WANG Haidong, et al. The optimizing research on aircraft handling workflow[J]. Science Technology and Engineering, 2010, 10(22): 5602-5605.
[2] Diez H, Philipp K. Towing vehicle for an aircraft: United Stated: US, 6675920 B1[P]. 2004-01-13.
[3] ����, �ƶ���, ����. ���������Ż������ɻ�ǣ����[J]. ����������Ӧ��: ���˳���, 2010(4): 100-101.
ZHANG Tao, HUANG Dingzheng, YU Peng. Military vehicle: Aircraft-tractor[J]. Truck & Logistics. 2010(4): 100-101.
[4] �θ�, ����, ФС��, ��. �������˻���ɶ���ѧ�о������[J]. ���������, 2007, 24(7): 20-23.
REN Gang, ZHOU Zhou, XIAO Xiaojian, et al. Research and simulation of unmanned aerial vehicle onboard take-off dynamics[J]. Computer Simulation, 2007, 24(7): 20-23.
[5] SUI Chengcheng, YANG Yongtian. Modeling and simulation of takeoff and landing for fixed-wing aircraft on carrier[C]//Asia Simulation Conference on System Simulation and Scientific Computing/International Conference on System Simulation and Scientific Computing. Beijing, 2005: 23-26.
[6] Gian L G, Stefania G. Analysis of landing gear behaviour for trainer aircraft[C]//15th European ADAMS Users�� Conference. Rome, 2000: 145.
[7] ��Ƽ, ����. �������½��̬�������ģ�ͼ������Ż����[J]. �Ͼ����պ����ѧѧ��, 2003, 35(5): 498-502.
JIN Ping, NIE Hong. Dynamic simulation model and parameter optimization for landing gear impact[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2003, 35(5): 498-502.
[8] ������, ������, �Ž���, ��. ǣ����ǣ���˶����ȶ����о�[J]. �Ϻ���ͨ��ѧѧ��, 2005, 39(9): 1470-06.
REN Shaoyun, ZHANG Yunxia, ZHANG Jianwu, et al. The stability analysis of towing behavior for towing tractor[J]. Journal of Shanghai Jiaotong University, 2005, 39(9): 1470-06.
[9] XU Guan, SU Jian, SU Lili, et al. Experiments on the stability steering performance of semi-trailer model[C]//2009 International Conference on Computer and Communications Security. Hong Kong, 2009: 96-99.
[10] Romano M. D, Richard H, Olivier A, et al. Experimental stabilization of tractor and tractor-trailer like vehicles[C]// Proceedings of the 2002 IEEE International Symposium on Intelligent Control. Vancouver, Canada, 2002: 188-193.
[11] Rifford L. Stabilization problem for nonholonomic control systems[J]. Advances in Mathematics for Applied Sciences, 2008, 76: 260--269.
[12] ���ܽ�, ������. �ɻ�ǣ�����Զ�ת������о�[J]. ���������̴�ѧѧ��, 2011, 32(10): 1346-1351.
WANG Nengjian, ZHOU Lijie. Research on the active steering control of an aircraft tractor[J]. Journal of Harbin Engineering University, 2011, 32(10): 1346-1351.
[13] ����. �����˶��뽨ģ[M]. 2��. ����: ������ҵ������, 2008: 1-148.
LI Dianpu. Motion and modeling of ship[M]. 2nd ed. Beijing: National Defence Industry Press, 2008: 1-148.
[14] ������, ���ܽ�, �ŵ¸�. ����ֱ�����װ�ǣ��ϵͳ�˶��ȶ��Է���[J]. ���Ͻ�ͨ��ѧѧ��, 2011, 46(3): 409-414.
ZHOU Lijie, WANG Nengjian, ZHANG Defu. Motion stability analysis of carrier helicopter traction system on deck[J]. Journal of Southwest Jiaotong University, 2011, 46(3): 409-414.
(�༭ ����ƽ)
�ո����ڣ�2012-06-14�������ڣ�2012-10-15
������Ŀ���������пƼ������˲��о�ר���ʽ�(2012RFXXG039)
ͨ�����ߣ����첩(1987-)��Ů���������������ˣ���ʿ�о��������·ɻ�ǣ��ϵͳ�ȶ��Է����������о����绰��13654506426��E-mail��lhbcims10@163.com
ժҪ���Լװ��Ϸɻ��и�ǣ��ϵͳ����ʻ���Խ��з�����������ǽ�����ҡ����ҡ�ʹ���3�����ɶȵ�����˶���ǣ��ϵͳ�����Ĺ����������������ɶ�ʱ�䡢������ǣ����-�ɻ�ϵͳ����ѧģ�͡�����Matlab/Simulink�Լ�����ϵͳ����ѧ�������о��װ���ǣ��ϵͳ����ʻ���Ի���������ǣ��ϵͳ�ڲ�ͬ����������״������ʻ�ٶȵ������µı������������۷����ͷ����������������Լ�������Ӱ�콢�ػ�ǣ��ϵͳ��ʻ���Ե���Ҫ���ء���ϵͳ�Բ�ͬ�ٶ���ʻʱ�ܹ��ܿ�شﵽ�ȶ�״̬����ʹ�ڲ���Ŷ����Ա��ֳ����õIJ����ȶ��ԡ�
[1] ����, �����, ������, ��. ���ػ�������ҵ�����Ż��о�[J]. ��ѧ�����빤��, 2010, 10(22): 5602-5605.
[2] Diez H, Philipp K. Towing vehicle for an aircraft: United Stated: US, 6675920 B1[P]. 2004-01-13.
[3] ����, �ƶ���, ����. ���������Ż������ɻ�ǣ����[J]. ����������Ӧ��: ���˳���, 2010(4): 100-101.
[4] �θ�, ����, ФС��, ��. �������˻���ɶ���ѧ�о������[J]. ���������, 2007, 24(7): 20-23.
[7] ��Ƽ, ����. �������½��̬�������ģ�ͼ������Ż����[J]. �Ͼ����պ����ѧѧ��, 2003, 35(5): 498-502.
[8] ������, ������, �Ž���, ��. ǣ����ǣ���˶����ȶ����о�[J]. �Ϻ���ͨ��ѧѧ��, 2005, 39(9): 1470-06.
[12] ���ܽ�, ������. �ɻ�ǣ�����Զ�ת������о�[J]. ���������̴�ѧѧ��, 2011, 32(10): 1346-1351.
[13] ����. �����˶��뽨ģ[M]. 2��. ����: ������ҵ������, 2008: 1-148.
[14] ������, ���ܽ�, �ŵ¸�. ����ֱ�����װ�ǣ��ϵͳ�˶��ȶ��Է���[J]. ���Ͻ�ͨ��ѧѧ��, 2011, 46(3): 409-414.
