
DOI: 10.11817/j.issn.1672-7207.2016.02.013
����ҡ������ϵȡ���������ƥ�����Ż�
����1��Ԭ��ǿ1�����1�����2
(1. ���ִ�ѧ ��е��ѧ�빤��ѧԺ������ ������130022��
2. ���ִ�ѧ ������ũҵ����ѧԺ������ ������130022)
ժ Ҫ��
ũ�յ�Ҫ������ʽ��ֲ��Ӧ���ڸ���ˮ������������ϵ��ת�����У����һ����������ҡ������ϵȡ���������������ˮ������������ҡ������ϵȡ������Ľṹ�ص����ԭ��������ȡ���������ѧģ�ͣ�ͨ��MATLAB��̶�ȡ������ľ��켣�����˷������Ż�����Ӱ�����й켣�˶����Ե�4����Ҫ�����ֱ�ѡȡ��ͬ����ֵ�����Ż����õ��ʺϸû���������ũ��Ҫ���һ�����Ų�����ȡ�������ʼλ�ý�a5=-6.05e-2(��)�������ְ뾶R=78 mm����ֲ�۳���lc=112.51 mm����ֲ�۵ij�ʼλ�ý�a6=22.73e-2(��)�������Ż��������ȡ���������ά��������ģ�͡�ͨ��RecurDyn����ѧ��������۷���������֤�����������������顣�о������������ȡ���������ѧ�������á�
�ؼ��ʣ�
���ٲ�����������ƥ����ȡ��������켣�Ż���
��ͼ����ţ�S223.91 ���ױ�־�룺A ���±�ţ�1672-7207(2016)02-0443-07
Parameters matching and optimization of seedling pick-up mechanism with crank-rocker planetary gear train
SHANG Tao1, YUAN Ruiqiang1, TIAN Cong1, WANG Xin2
(1. College of Mechanical Science and Engineering, Jilin University, Changchun 130022, China;
2, College of Biological and Agricultural Engineering, Jilin University, Changchun 130022, China)
Abstract: In order to fulfill the agronomic demand of rice planting��the transplanting arms with grippers were applied to the planetary rotation mechanism of high-speed rice transplanter, and a new seedling pick-up mechanism with crank-rocker planetary gear train was designed. The structural features and working principle of seedling pick-up mechanism with crank-rocker planetary gear train was discussed, and the mathematical model of the seedling pick-up mechanism was established. The static trajectory of seedling pick-up mechanism was analyzed and optimized through MATLAB programming, four main parameters influencing the trajectory characteristics of seedling pick-up arms were optimized by choosing different numbers, and a series of optimal structural parameters fulfilling the agronomic demand of rice planting were obtained. The initial position angle of seedling pick-up mechanism (a5) was -6.05e-2(��), the radius of the planet wheel (R) was 78 mm, the length of seedling pick-up arms (lc) was 112.51mm, and the initial position angle of seedling pick-up arms (a6) was 22.73e-2(��). The virtual model of the proposed seedling pick-up mechanism was built with the optimization result, The theoretical analysis was verified by RecurDyn dynamic simulation and prototype test. The results show that the kinematical properties of the seedling pick-up mechanism are better.
Key words: high-speed transplanter; parameter matching; seedling pick-up mechanism; trajectory optimization
���ٲ����������ǰ��ʽ�ֲ��������תʽ�ֲ�����Ǹ���ˮ���������ձ���õĹؼ�����������Ҫ���������ȡ���Ͳ��������Ĺ������ܾ����˲������IJ���������Ч��[1]��ȡ�������ȡ��������Ҫ������צʽ������ʽ2�֡���צʽȡ�������ṹ�����������˺��ϴ�[2]������ʽ�˶������϶ࡢ������Ը��ӣ����������˺�С�������ڶ�[3-4]��Ŀǰ���ڸ��ٲ����������ƫ�ij�������ϵ����צʽ��ֲ�����ϵķֲ����[5-7]���Էֲ�����о�Ҳ�༯�������۷������Ż�����[8-15]������������Ҫ�������ʽ��ֲ��Ӧ��������ҡ������ϵȡ������ϵIJ���ƥ������о����������������ҡ������ϵȡ�������ͨ������ƥ���Ż�[16]���о���ͬ�����Ը���ˮ���������Բ�Ч����Ӱ�죬��������ƥ��ǰ�Ͳ���ƥ��켣�ı仯������Ż����о��켣�Ͷ��켣���ߣ��Ӷ�ƥ����ʺϸ���ˮ�������������Ų�����
1 �ṹ����빤��ԭ��
����ҡ������ϵȡ�������ͼ��ͼ1��ʾ����ȡ�������Ҫ������ҡ�˻�����������ϵ2��������ɡ�����ҡ�˻����ɲ�����6��̫����4���������ߵ�����5���ɣ����в�����6�ǡ���������̫����4��Ϊ��ҡ�ˡ���ͨ�����ó�����ʵ������ҡ�˻��������á�������ϵ����������ϵ(2��������1��2���м���2��̫����4)�����Ǽ�7��ɣ�̫����4��������3��ͬһ�����ϣ��������ó�������������ҡ�˵������ʵ�ָ��ٲ�����ͬʱҲ����С��ȡ������ڲ��������е���[17]��ȡ���������ʱ���ɶ������ݸ�������6��������6������5����̫����4ת�������Ӱ�쵽��װ��������1�ϵ�����ʽ��ֲ��8��ת����ʹ�����γɷ���ũ��Ҫ��IJ�ֲ�켣��
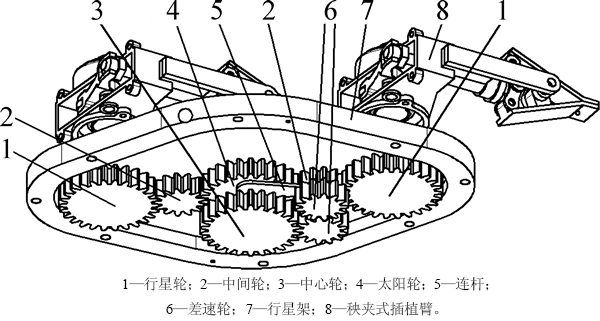
ͼ1 ����ҡ������ϵȡ�������ͼ
Fig. 1 Schematic drawing of seedling pick-up mechanism with crank-rocker planetary gear train
2 ȡ�������ѧģ��
2.1 ����ҡ�˻�����ѧģ��
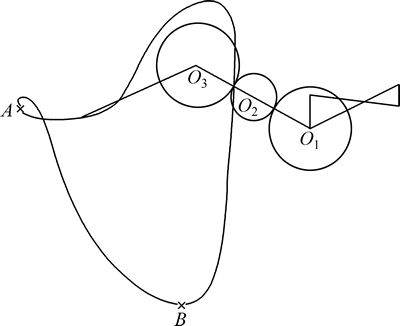
����ҡ������ϵȡ������Ļ�ת�����ǶԳƵģ����ֻ�����һ����ֲ�۵��˶��켣���ɣ�ͼ2��ʾΪȡ��������˶�����ͼ���ֱ�Ϊ��������ϵYO1X������ҡ������ϵYO2X������������ϵYO3X�����У���O1��O3��O4�ֱ�Ϊ���ܡ�������ϵ����ֲ�۵Ļ�ת���ģ�O1O4O3Ϊ���Ǽܣ�����ҡ�˻�����ҡ��Ҳ�Ƶ�O1���ڶ����������Ƶ�O2����ת�˶���C��Ϊ��ֲ������ĩ��λ�õ㣬O3CΪ��ֲ�ۡ�
Ϊ�˷�����㣬ѡȡ����ҡ�˻������е���������ͼ3��ʾΪ����ҡ���˶�����ͼ��
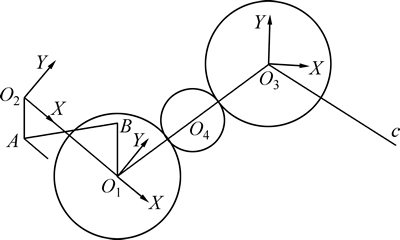
ͼ2 ȡ��������˶�����ͼ
Fig. 2 Analysis of motion of seedling pick-up mechanism
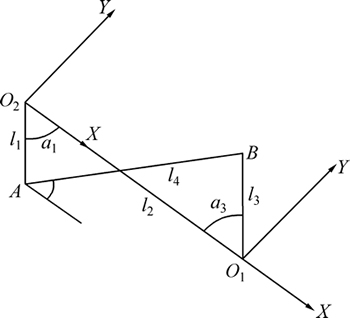
ͼ3 ����ҡ���˶�����ͼ
Fig. 3 Analysis of motion of crank-rocker
ͼ��AO2Ϊԭ�������ԵȽ��ٶ�w1(rad/s)ת�������������ȷֱ�Ϊl1(mm)��l2(mm)��l3(mm)��l4(mm)����r1��r2��r3��r4�ֱ�ΪAO2��O2O1��O1B��BA�ĵ�λ��������
AO2=l1r1��O2O1=l2r2��O1B=l3r3��BA=l4r4 (1)
��û����ķ��ʸ������Ϊ
 (2)
(2)
��ʸ��i��j�ֱ���ʽ(2)��
 (3)
(3)
r3=Mr1+Nr2 (4)
ʽ�У�M��N��Ϊδ֪����
��r1��r2�ֱ���ʽ(4)������
 (5)
(5)
�����μ����ʽ(4)����ʽ(2)���ɵ�
 (6)
(6)
�����ϸ�ʽ��֪��AO2��BO1��������֪��l1(mm)��l2(mm)��l3(mm)��l4(mm)��r1��r2��a1(��)��ʾ�������Ӷ�ȷ��������ҡ�˻�����λ�Ρ�
2.2 ��ֲ����ѧģ��
ͼ4��ʾΪ����ʽ��ֲ�۵��˶�����ͼ��ͼ��ȡ�������ʼλ�ýǼ�O1O3��x��������н�Ϊa5(��)�������ְ뾶O1O3ΪR(mm)����ֲ�۳���O3CΪlc(mm)����ֲ�۵ij�ʼλ�ýǼ���ֲ��O3C��x��������ļн�Ϊa6(��)����ͼ4��֪������������ϵYO3X��������ڻ�������ϵYO1X����ת�˶�����һ����ƽ���˶���
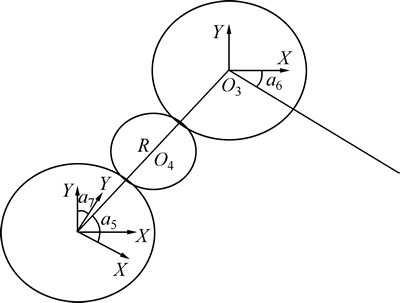
ͼ4 ��ֲ���˶�����ͼ
Fig. 4 Analysis of motion of transplanting arms
ȡ����������ϵ������һ��[x y]T����˵��ڻ�������ϵ�е�����Ϊ
 (7)
(7)
���У���Ϊ���Ǽܵ���ת�ٶȣ���ˣ��ڻ�������ϵYO1X�У���ֲ������гֵ�C������Ϊ[xC yC]T��
 (8)
(8)
ȷ���˲�ֲ������ĩ�˵�����˶����̺;����˶����̺�ͨ����ֵ�������ֱ�Է��������������������ĩ�˵�����ٶȺ;����ٶȡ�
3 �����Ż���������
3.1 ȡ�������ֲ�۹켣�������Ż�
��ȡ�������������гֵ�C�����귽��(8)�Լ��Ըû���ģ�ͽ��нṹ�����ķ�����֪�����������ȡ���������Ĺ���ѭ�������У�Ӱ�����й켣�˶����Ե���Ҫ�����У�ȡ�������ʼλ�ý�a5�������ְ뾶R����ֲ�۳���lc����ֲ����x��������ļн�a6��
Ϊʹ����ʽ��ֲ����ȡ���Ͳ�������������ˮ����ֲũ�յ�Ҫ���������ĩ�˵��˶��켣���в����Ż���������Ż�Ŀ�����£�
1) Ϊ��֤ȡ�������е��ȶ��Լ����������ֱ���ԣ�������ȡ���Ͳ�������������Ӧ��ȡ����(ȡ��ʱ��צ��ˮƽ�ߵļн�)�Ͳ�����(��������ʱ���к�ˮƽ�ߵļн�)�����㣺ȡ����Ӧ��5��~25��֮�䣬������Ӧ��60��~80��֮�䣬�ǶȲ�ԼΪ55�㡣
2) Ϊ�˷�ֹ����������ֵ�����Ư�����������켣��Ѩ�ڳ���s���Ϊ20~30 mm��
3) Ϊ������������г��֡����š�������צ�����켣�ĸ߶ȱ�����ڻ����200 mm��
4) �ڲ�����س̹����У���צҪ�����ϲ������˶����ƣ�������צ�����Ѳ�õ����硣
5) ����צʽ��ֲ���ڲ��������в��ܷ����˶����档
6) ����ȡ�������в��������Ų������档
7) Ϊ��Сȡ�����������ж�������˺�������ȡ��ʱӦ���������䱣�ִ�ֱ��
��������7���Ż�Ŀ�꣬ͨ��MATLAB��д�˶�ѧ�����켣�Ż�����[18-19]����Ӱ�����й켣�˶����Ե�4����Ҫ�����ֱ�ѡȡ��ͬ����ֵ�����Ż����棬�����ͼ5��ʾ����ͼ5���Կ������ı䵥һ���������켣���ᷢ����ͬ�̶ȵı仯�����ң��ı䲻ͬ�IJ��������켣�ı仯����Ҳ��ͬ����ͬʱ�ı�������������Լ�������������£����������֮��Ҳ���Ӱ�졣
ͨ��MATLAB�Ż���Ʒ�����������ȡ��������й켣Ӱ����������˳�ֵķ������Ż��������յõ��ʺϸ�ȡ�����������ũ��Ҫ���һ�����Ų�����a5=-6.05e-2(��)��R=78 mm��lc=112.51 mm��a6=22.73e-2(��)��
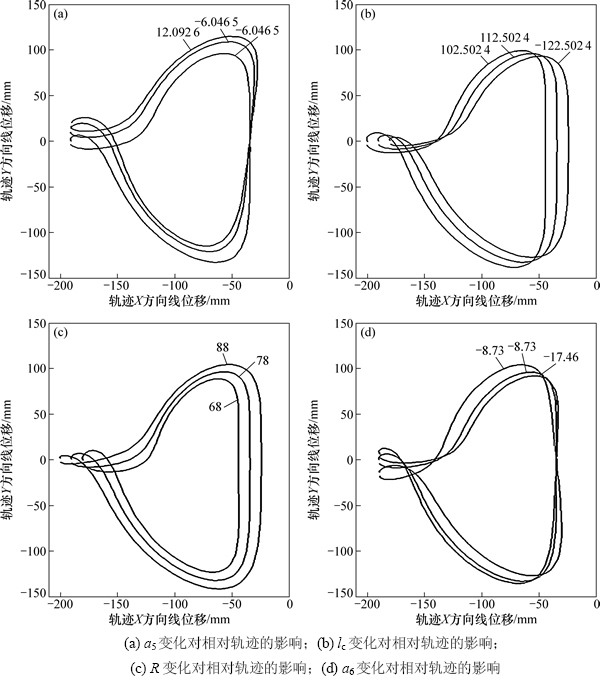
ͼ5 ȡ����������仯����Թ켣��Ӱ��
Fig. 5 Effects of variation of parameters to relative track of seedling pick-up arm
ͼ6��ʾΪ����ҡ������ϵȡ��������켣�Ż�ǰ���Ż���ĶԱȡ�ͼ7��ʾΪ�����Ż����ȡ������������켣�����Ż���IJ����켣�п�֪��A��Ϊ���е�ȡ���㣬ȡ����ѡȡΪ13.03�㣬��ȡ�������У���������һ�����ϵ��ػض�������ʵ�������д�����������ȡ�����������Լ��ٶ�������˺������ұ�֤����������B�㼴Ϊ���еIJ����㣬���в�����Ϊ68.43�㣬����ȡ���Ͳ�����Ҫ��������Բ�ֲ��������צ���������Ա�֤�������������Ż���IJ������켣�п��Եó������켣�߶�Ϊ260 mm�����Ա��������������ŵ����������켣�IJ���Ѩ�ڳ���Ϊ28 mm���ɷ�ֹ��������Ư��������ķ�����
�趨���200 mmʱͨ��RecurDyn�������ܵõ������еĶ��켣����ͼ8��ʾ����ͼ8�ɼ������а����Ų����켣���в�������֤�˲����ľ��ȡ�
3.2 �����������
�����Ż����õĽṹ��������RecurDyn�����н�����ȡ�������������װ��ģ�ͣ��Ը�ȡ�������άģ�͵��˶��켣���з������[20]���õ���ֲ�۾��켣��ͼ9��ʾ����ͼ9���Եó�RecurDyn����ľ��켣��������ǰ��ʽȡ��������еĹ켣Ҫ����������ȡ���ǣ����Ҽ�С�˲����ǣ��������˲����켣Ҫ���ֱ�֤�˲���Ч�ʡ�
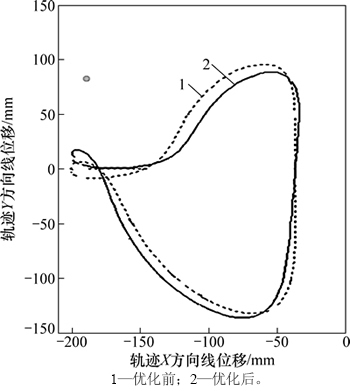
ͼ6 ���۹켣���Ż��켣�Ա�
Fig. 6 Comparison of theoretical trajectory and optimum trajectory
ͼ7 ȡ��������켣
Fig. 7 Static trajectory of seedling pick-up mechanism
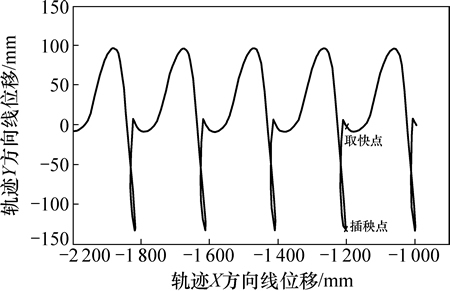
ͼ8 ���еĶ��켣
Fig. 8 Dynamic trajectory of seedling pick-up mechanism
�س̹����У���צ��һ�����ϲ������˶����ƣ����������צ�����Ѳ����������������й��������У�������ˮƽ����ļн���0��~70��֮��仯�������˸��ٲ�����ȡ�����ȡ���Ͳ�����������ĽǶȡ�
3.3 ������֤
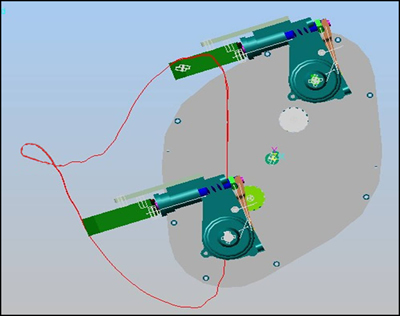
Ϊ��֤�����������ĺ����ԣ��ӹ���ȡ�����ʵ��ģ�ͣ����ø����������ȡ����������������������˶�1�ܵ��˶��켣��ͨ��VB����ʵʱ����ͼ�õ������е��˶��켣����ͼ���õ���ʵ��ģ�Ͳ������켣��ͼ10��ʾ����ͼ10���Կ�������ҡ������ϵȡ�������ʵ�ʲ����켣��������������õIJ����켣����һ�¡�
ͼ9 ȡ������������켣
Fig. 9 Static trajectory of seedling pick-up mechanism
ͼ10 ʵ��ģ�Ͳ������켣
Fig. 10 Static trajectory of physical model
4 ����
1) ��������ˮ��������ǰ��ʽ����ҡ������ϵȡ������Ľṹ�ص����ԭ����������Ӧ����ѧģ�͡�
2) ������ҡ������ϵȡ������������й켣�Ż���������ȡ��������˶�ѧӰ��������з������Ż������õ�һ�����㹤��Ҫ��Ľṹ������
3) �û����ܹ�ʵ�ֲ���ʱ����������˶�ѧĿ�꣬ȷ������ƥ����������ѧ�������á�
�ο����ף�
[1] ����, ����, �����, ��.ˮ���������ִ���������뷽��[J].ũҵ��еѧ��, 2011, 42(3): 65-68, 43.
ZHAO Yun, ZHAO Xiong, ZHANG Weiwei, et al. Modern design theory and method of rice transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(3): 65-68, 43.
[2] κԪ��, ������, ������, ��. ����ֲ�������˶������������[J]. ũҵ��еѧ��, 2012, 43(Z1): 116-119, 145.
WEI Yuanzhen, LI Qiyun, CAO Shuhong, et al. Experiment on motion law of being cutted maize stalk[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(Z1): 116-119, 145.
[3] ���. ����ˮ������������ƥ���о�[D]. ����: ���ִ�ѧ��еѧԺ, 2013: 30-45.
TIAN Cong. Study on parameters matching of high-speed rice transplanter[D]. Changchun: Jilin University. College of Mechanical Engineering, 2013: 30-45.
[4] OHSUMI A, FURUHATA M, MATSUMURA O. Varietal differences in biomass production of rice early after transplanting at low temperatures[J]. Plant Production Science, 2012, 15(1): 32-39.
[5] �䴫��, ����, ������. ����������ҡ�˷ֲ�������˶����Ժ��Ż�����[J]. ��е���, 2002, 19(11): 37-38, 49.
WU Chuanyu, ZHAO Yun, JIANG Huanyu. Kinematical properties and optimal analysis of separate-planting mechanism with crank-rocker epicylic gear[J]. Journal of Machine Design, 2002, 19(11): 37-38, 49.
[6] ������, ������, ����. ƫ�ı�λ�����ڷֲ�����е���Ƽ�Ӧ��[J]. ��е����, 2013(1): 105-108.
FAN Suxiang, HOU Shulin, ZHAO Yun. Design and application of the eccentric modified gears in planetary transplanting mechanism[J]. Journal of Mechanical Transmission, 2013(1): 105-108.
[7] ��ߺ�, �����, ����, ��. ƫ�ij���-��Բ����������ϵ�ں����תʽ�ֲ�����е�Ӧ��[J]. ũҵ����ѧ��, 2011, 27(4): 100-105.
YU Gaohong, ZHANG Weiwei, SUN Liang, et al. Application of planetary gear train with eccentric gears and non-circular gear in backward rotary transplanting mechanism[J]. Transactions of the CSAE, 2011, 27(4): 100-105.
[8] ����, �ƾ���, �Ź���, ��. ������Բ���ֲַ�����˶��������Ż�[J]. ũҵ��еѧ��, 2011, 42(4): 48-52, 61.
ZHAO Yun, HUANG Juming, ZHANG Guofeng, et al. Kinematic analysis and optimization of transplanting mechanism with deformable elliptic gears transmission[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(4): 48-52, 61.
[9] ��ߺ�, Ǯ�ϲ�, ����, ��. ƫ�ij���-��Բ��������ϵ�ֲ�����˶���������[J]. ũҵ��еѧ��, 2009, 40(3): 81-84.
YU Gaohong, QIAN Mengbo, ZHAO Yun, et al. Analysis of kinematic principle of transplanting mechanism with eccentric gears and non-circular gears[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(3): 81-84.
[10] ��ߺ�, ��С��, Ҷ����, ��. ��תʽˮ���������Ի����Ļ�������������Ż�[J]. ũҵ����ѧ��, 2013, 29(3): 16-22.
YU Gaohong, HUANG Xiaoyan, YE Bingliang, et al. Principle analysis and parameters optimization of rotary rice pot seedling transplanting mechanism[J]. Transactions of the CSAE, 2013, 29(3): 16-22.
[11] �ƾ���. ������Բ���ִ��������תʽ�ֲ���������۷������Ż����[D]. �㽭������ѧ��еѧԺ, 2011: 25-37.
HUANG Juming. Theoretical analysis and optimization of transplanting mechanism with deformable elliptical gears transmission[D]. Institutes of Technology of Zhejiang. College of Mechanical Engineering, 2011: 25-37.
[12] ����. ũҵ��е�������ۺ�[M]. ����: ��е��ҵ������, 2009: 56-78.
ZHAO Yun. Analysis and synthesis of agricultural machinery[M]. Beijing: China Machine Press, 2009: 56-78.
[13] Ҷ����, ��ߺ�, ��־��, ��. ƫ�ij���-��Բ��������ϵȡ��������˶�ѧ��ģ������Ż�[J]. ũҵ����ѧ��, 2011, 27(12): 7-12.
YE Bingliang, YU Gaohong, CHEN Zhiwei, et al. Kinematics modeling and parameters optimization of seedling pick-up mechanism of planetary gear train with eccentric gear and non-circular gear[J]. Transactions of the CSAE, 2011, 27(12): 7-12.
[14] �½���, ��ǰ��, ��Ӣ, ��. �������Ի���Բ��������ϵֲ������˶�ѧ��ģ�����[J]. ũҵ����ѧ��, 2012, 28(5): 6-12.
CHEN Jianneng, HUANG Qianze, WANG Ying, et al. Kinematics modeling and analysis of transplanting mechanism with planetary elliptic gears for pot seedling transplanter[J]. Transactions of the CSAE, 2012, 28(5): 6-12.
[15] ZHAO Y, SUN L, YU G H, et al. Innovation, optimization, virtual testing, and industrialization of a walking-type rice transplanting mechanism[J]. Transactions of the ASABE, 2012, 55(6): 2035-2042.
[16] �ƹ���, ������, ������, ��. �綯ˮ�����������ʷ���������Ż�[J]. ����ũ�ֿƼ���ѧѧ��(��Ȼ��ѧ��), 2012(12): 225-229.
YAN Guoqi, ZHANG Tiemin, WEN Lili, et al. Power allocation and parameter optimization of electric rice transplanter[J]. Journal of Northwest A&F University (Natural Science Edition), 2012(12): 225-229.
[17] LITVIN F L, GONZALEZ-PEREZ I, FUENTES A, et al. Design and investigation of gear drives with non-circular gears applied for speed variation and generation of functions[J]. Computer Methods in Applied Mechanics and Engineering, 2008, 197(45): 3783-3802.
[18] ����, �ܳ�ʡ, �����, ��. ����ϵ�ֲ�����������ƽ̨��ơ�����LabVIEW��MATLAB[J]. ũ�����о�, 2013, 35(3): 100-102.
ZHANG Min, ZHOU Changsheng, WU Chongyou, et al. Simulation analysis platform for planet gears transplanting mechanism based on LabVIEW and MATLAB[J]. Journal of Agricultural Mechanization Research, 2013, 35(3): 100-102.
[19] ׯ����, ����, ����. ���� MATLAB ��ũ����Ϣ���ӻ�ʵ��[J]. ũ�����о�, 2011, 33(6): 137-140.
ZHUANG Weidong, WANG Chun, WANG Xi. The visual implementation of field information based on MATLAB[J]. Journal of Agricultural Mechanization Research, 2011, 33(6): 137-140.
[20] ������, �����, �۾�. ����RecurDyn���ּ��������������[J]. ��е������о�, 2012, 28(3): 13-16.
TIAN Yongli, LUO Zhenjun, ZOU Huijun. Simulation and analysis of cam thread-cutting mechanism based on RecurDyn[J]. Journal of Machine Design and Research, 2012, 28(3): 13-16.
(�༭ �°���)
�ո����ڣ�2015-02-13�������ڣ�2015-04-20
������Ŀ(Foundation item)�����Ҹ����о���չ�ƻ�(863�ƻ�)��Ŀ(2013AA063903)(Project (2013AA063903) supported by the National High-tech R&D Program of China (863 Program))
ͨ�����ߣ���꿣���ʿ�����ڣ�����ʳƷ������ʳƷ��е�����о���E-mail��wx@ jlu.edu.cn
ժҪ��Ϊ����ˮ����ֲũ�յ�Ҫ������ʽ��ֲ��Ӧ���ڸ���ˮ������������ϵ��ת�����У����һ����������ҡ������ϵȡ���������������ˮ������������ҡ������ϵȡ������Ľṹ�ص����ԭ��������ȡ���������ѧģ�ͣ�ͨ��MATLAB��̶�ȡ������ľ��켣�����˷������Ż�����Ӱ�����й켣�˶����Ե�4����Ҫ�����ֱ�ѡȡ��ͬ����ֵ�����Ż����õ��ʺϸû���������ũ��Ҫ���һ�����Ų�����ȡ�������ʼλ�ý�a5=-6.05e-2(��)�������ְ뾶R=78 mm����ֲ�۳���lc=112.51 mm����ֲ�۵ij�ʼλ�ý�a6=22.73e-2(��)�������Ż��������ȡ���������ά��������ģ�͡�ͨ��RecurDyn����ѧ��������۷���������֤�����������������顣�о������������ȡ���������ѧ�������á�
[1] ����, ����, �����, ��.ˮ���������ִ���������뷽��[J].ũҵ��еѧ��, 2011, 42(3): 65-68, 43.
[2] κԪ��, ������, ������, ��. ����ֲ�������˶������������[J]. ũҵ��еѧ��, 2012, 43(Z1): 116-119, 145.
[3] ���. ����ˮ������������ƥ���о�[D]. ����: ���ִ�ѧ��еѧԺ, 2013: 30-45.
[5] �䴫��, ����, ������. ����������ҡ�˷ֲ�������˶����Ժ��Ż�����[J]. ��е���, 2002, 19(11): 37-38, 49.
[6] ������, ������, ����. ƫ�ı�λ�����ڷֲ�����е���Ƽ�Ӧ��[J]. ��е����, 2013(1): 105-108.
[8] ����, �ƾ���, �Ź���, ��. ������Բ���ֲַ�����˶��������Ż�[J]. ũҵ��еѧ��, 2011, 42(4): 48-52, 61.
[9] ��ߺ�, Ǯ�ϲ�, ����, ��. ƫ�ij���-��Բ��������ϵ�ֲ�����˶���������[J]. ũҵ��еѧ��, 2009, 40(3): 81-84.
[10] ��ߺ�, ��С��, Ҷ����, ��. ��תʽˮ���������Ի����Ļ�������������Ż�[J]. ũҵ����ѧ��, 2013, 29(3): 16-22.
[11] �ƾ���. ������Բ���ִ��������תʽ�ֲ���������۷������Ż����[D]. �㽭������ѧ��еѧԺ, 2011: 25-37.
[12] ����. ũҵ��е�������ۺ�[M]. ����: ��е��ҵ������, 2009: 56-78.
[19] ׯ����, ����, ����. ���� MATLAB ��ũ����Ϣ���ӻ�ʵ��[J]. ũ�����о�, 2011, 33(6): 137-140.
[20] ������, �����, �۾�. ����RecurDyn���ּ��������������[J]. ��е������о�, 2012, 28(3): 13-16.
