
���ھֲ�������Ⱥ����Ϊ��̬�ɿ���
��ɷ�1����ΰ1, 2�����ڴ�1��������1, 2
(1. ���ִ�ѧ ͨ�Ź���ѧԺ������ ������130025��
2. ���ִ�ѧ ���̷����������ص����ʵ���ң����� ������130025)
ժ Ҫ��
��ϵͳ�ֲ���������������Ⱥ���ٶȶ�̬�ɿص����⡣�ھ���ʱ�������ٶȵ�Ⱥ�������ϵͳ�м�������̬�쵼�ߣ���ƻ��ھֲ���Ϣ�����ķֲ�ʽ��������Ϊ��֤����Ⱥ�����˽ṹͼ����������ͼ������Barbalat���������ȶ��Է�����֤���ھֲ���Ϣ������ͨ�����쵼��ʩ�ӿ��ƣ��ܹ�ʹϵͳ�е����и�����ٶ�ʸ��������ʱ������ֵ��ʹȺ���γ��ȶ��ṹ��ͬʱ֤�������쵼��Խ�࣬Ⱥ���ٶ�����Խ�졣����ʵ���������ÿ��Ʋ�����Ч��
�ؼ��ʣ�
Ⱥ����Ϊ�������̬�쵼�����ɿ������ֲ�ʽ�������ȶ��Է�����
��ͼ����ţ�TP24 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0536-08
Active controllability of flocking behavior based on local interaction
LI Cheng-feng1, Hong Wei1, 2, LIU Zong-chun1, Tian Yan-tao1, 2
(1. School of Communication Engineering, Jilin University, Changchun 130025, China;
2. Key Laboratory of Bionics Engineering, Ministry of Education, Jilin University, Changchun 130025, China)
Abstract: Active speed controllability for the swarm flocking system was studied without breaking the local interaction rules. First, multiple active leaders were introduced to the swarm non-autonomous system with time-varying expected speed, then a decentralized controller was designed based on local information interaction. In order to simplify the proof, the topology graph of swarm was divided into two types of subgraph, and the Barbalat Lemma was adopted in analysis of the system stability, and it is proofed that speed vectors of all robots can converge to the desired value through controlling the leaders and the swarm will form a stable structure following the local information interaction rules. It is also confirmed that the more leaders are introduced, the faster the swarm converges. Simulation results show that the designed control strategy is effective.
Key words: flocking behavior; multiple active leaders; controllability; distributed control; analysis of stability
����Ȼ���еĶ���Ⱥ����Ϊ[1]��������Ⱥ��ϵͳ���ڹ�ȥ�ļ����ڳ�Ϊ�����о�����[2-12]��Ⱥ�������ϵͳ��Ҫ����Ⱥ��ģ��������Ⱥ��һ������Ϊ����ˣ����зֲ�ʽ������֯��ӿ���Ե����ԡ�����������ϵͳȱ���ⲿ��Ϣ��������������֮�����Ϣ������ʹȺ��ģ�͵�һ���Դ�����һ�����������⣺����ƽ���������кܴ������ԣ����Ѵﵽһ������״ ̬[13]������������⣬����Ⱥ��ϵͳ�ġ��ɿ��ԡ�Ϊ���ڲ��ı�Ⱥ��ģ�����й��������£��ܹ�ȷ����Ӧ�Ŀ��Ʋ������㷨ʹ��Ⱥ��ﵽ�������ٶ�(�������ٺͱ��ٶ�)��Olfati-Sabe[14]�ڼ��������쵼�ߵ����÷�Χ��ȫ�ֵģ��������쵼���Ժ����˶�������£������һ�ֻ����캽������Ⱥ���㷨��ʹȺ���ܹ������������쵼�ߡ�Su��[15]�ڴ˻����ϣ��о���û���������������ľ��������쵼�ߵĶ�������Ⱥ������ʵ����Ҳֻʵ���˾ֲ�������Ⱥ������Ժ����˶��������쵼�ߵ��������û�и����Ա����˶��������쵼�ߵ����÷�Χ���Ǿֲ������۷�����Hong��[16]����˾ֲ������µ�Ⱥ����ٱ����˶����쵼�����⣬���Ծ�����һ��Ⱥ��ģ�͡�������������������⣬��Ⱥ���м��������ƻ�Ⱥ��ֲ�������쵼�ߣ��Ծ���ʱ�������ٶȵ�Ⱥ�������ϵͳ����ƾֲ����Ʋ��ԣ�������Barbalat����֤������Ƶķֲ�ʽ��������Ч��
1 Ⱥ�������ģ����ֲ�ʽ����
1.1 Ⱥ�������ģ��
�����ڶ�ά�ռ����˶���Ⱥ������ˣ�Ⱥ����N (N��1)����������ɣ���i������Ķ���ѧģ��Ϊ
![]() (1)
(1)
����i=1, 2, ��, N��xi![]() R2��vi
R2��vi![]() R2��ui�ֱ��ǻ�����i��λ�á��ٶȺͿ������롣��������ͨ����ʱ�ͣ�û���Ŷ��������ڸ����ϡ�����x=
R2��ui�ֱ��ǻ�����i��λ�á��ٶȺͿ������롣��������ͨ����ʱ�ͣ�û���Ŷ��������ڸ����ϡ�����x= ![]() ��
��![]() �ֱ��������Ⱥ���λ�ú��ٶȡ�
�ֱ��������Ⱥ���λ�ú��ٶȡ�
1.2 Ⱥ�����˹�ϵ
Ⱥ������N�������ˣ�M(M��1)���쵼�ߣ���N+M�����壬����佻����Ϣ�γ�ͨ�����ˡ�
����1��Ⱥ�������ϵͳ��2������i��j��Ϊ�ھӣ����ҽ�����ʽ������![]() ������d0Ϊ������������Ϊ�����˵�ͨ�ŷ�Χ�뾶�������ڴ˷�Χ�ڣ������˿���ȷ��֪���������˵���Ϣ�Լ��쵼�ߵ���Ϣ����ô����i���ھӼ���Ϊ��
������d0Ϊ������������Ϊ�����˵�ͨ�ŷ�Χ�뾶�������ڴ˷�Χ�ڣ������˿���ȷ��֪���������˵���Ϣ�Լ��쵼�ߵ���Ϣ����ô����i���ھӼ���Ϊ��
![]() (2)
(2)
����2��Ⱥ��ϵͳ���������˽ṹͼG�У�N+MΪ�������������˸�����EΪ�ߵĸ�����Ⱥ�����ھӷ�Χ��2������Ի�����ԡ������ǰʱ�̸���i�ܵõ�j����Ϣ���ͳƴ�j��i�ı������ӵģ������j��iû�����ӵıߡ�Ϊ��֤������ͼG�ֳ���ͼGi��![]() (l=N+1, N+2, ��, N+M)�����������л�������ɵ���ͼΪ����ͼG1���������ΪN���߸���ΪE1�������л�����֮��ֻҪ���ھӾͿ�ͨ�ţ������л����˺��쵼��l��ɵ���ͼΪ����ͼ
(l=N+1, N+2, ��, N+M)�����������л�������ɵ���ͼΪ����ͼG1���������ΪN���߸���ΪE1�������л�����֮��ֻҪ���ھӾͿ�ͨ�ţ������л����˺��쵼��l��ɵ���ͼΪ����ͼ![]() �����������ΪN+1���߸���Ϊ
�����������ΪN+1���߸���Ϊ![]() ���һ�����֮��û�бߣ�����ͼ
���һ�����֮��û�бߣ�����ͼ![]() ��ֻ�л������ܸ�֪���쵼����Ϣ���쵼�߲��ܻ�����Ӱ�죬�һ�����֮����ͨ�š�
��ֻ�л������ܸ�֪���쵼����Ϣ���쵼�߲��ܻ�����Ӱ�죬�һ�����֮����ͨ�š�
��ͼG1�Ĺ�������Ϊ��
![]() (3)
(3)
���� ��
��
��ͼ![]() ���ڽӾ���Ϊ:
���ڽӾ���Ϊ:
![]() (4)
(4)
����![]() ��
��
![]() ����ͼG1��������˹������ȻL1��
����ͼG1��������˹������ȻL1��![]() �ǶԳ����붨������L1���������Ĵ�������������ͼ�е���ͨ���֣��������ͨͼ�����е�һ��������ֵ��������Ӧ����������1��nά����1n [17]��
�ǶԳ����붨������L1���������Ĵ�������������ͼ�е���ͨ���֣��������ͨͼ�����е�һ��������ֵ��������Ӧ����������1��nά����1n [17]��
����1�����ļ�����ͼG1��ͼG��ͨ��
1.3 ���ܺ���
Ⱥ����һ������Ҫ�������ڸ��屣��һ����ࡣ��������̫С�����ǻ���ͼ�ֿ����������ھ�
�������á������i��j֮��ľ���Ϊ![]() ����
����![]() ��ʾ����i��j֮������ܺ���������������������1)�Ǹ����ɵ�����
��ʾ����i��j֮������ܺ���������������������1)�Ǹ����ɵ�����![]()
![]() ��2)��
��2)��![]() ʱ��
ʱ��![]() �����ֵ��3)��
�����ֵ��3)��![]() Ϊһ��ֵʱ��
Ϊһ��ֵʱ��![]() ����Сֵ���Ӷ���֪����i��������Ϊ��
����Сֵ���Ӷ���֪����i��������Ϊ��![]() ��
��
1.4 �ֲ�ʽ���Ʋ���
��ǰ�������ھ���N�������˵�Ⱥ�����M��������ͬʱ���ٶȵ��쵼�ߣ��쵼�߶���ѧģ��Ϊ��
![]() (5)
(5)
���У�l=N+1��N+2������N+M��vl��al(t)�ֱ��ǵ�l���쵼�ߵ��ٶȺͼ��ٶȣ�ve��ae(t)�ֱ���Ⱥ��Ⱥ��������ٶȺͼ��ٶȣ���ve��ae(t)�н硣��ʽ(5)���Կ�����Ⱥ������������쵼�߿ɿأ��Ӷ����Ը��ݲ�ͬ������Ҫ�������п��ƣ�����Ӱ������Ⱥ����˶�ʵ�ֿ���Ŀ�ꡣ
��������[2]����Ĺ�����ƻ��ھֲ���Ϣ�����ķֲ�ʽ���������£�
![]()
![]() (6)
(6)
���У�j=1, 2, ��, N+M��k=1, 2, ��, N��vi��vk�ֱ��ǵ�i���͵�k�������˵��ٶȣ�c1>0��c2>0��ʽ�е�1�֤Ⱥ�������и����ı�������2��ʵ�����и�����ٶ�ƥ�䣬��3��͵�4�֤Ⱥ��ϵͳ���ٶȿɿأ�����ʹȺ�������и���ﵽ�������ٶȡ���ʽ(6)���Կ������쵼�ߵļ���û���ƻ�Ⱥ���и���ľֲ������쵼�ߵ����÷�Χ����ȫ�ֵġ�
2 �ȶ��Է���
����(Barbalat)��������������ɵ��ĺ���
![]() ���½磬
���½磬![]() �븺������
�븺������![]() ����ʱ��t��һ�������ģ���ô��
����ʱ��t��һ�������ģ���ô��![]() ��
��
����(Ⱥ���ٶȿɿ���)��������N(N��1)����������ɵ�Ⱥ��ϵͳ����Ⱥ�м���M(M��1)���쵼�ߣ�������л����˵Ķ���ѧ������ʽ(1)ȷ�������ƹ�����ʽ(6)ȷ�����쵼�ߵ��˶�ѧģ����ʽ(5)ȷ������M���쵼�ߵ��ٶ�ʸ����ΪȺ���ʱ�������ٶ�ve�����ٶ�ʸ����Ϊ�������ٶ�ae(t)����ô���������1�������£�Ⱥ�������л����˵��ٶ�ʸ���������ڸ������ٶ�ve��
֤�����������л����˺��쵼��֮�������������Զ���֮�����£�
���������i��λ�ú��ٶ������ھӷ�Χ�ڵ��쵼��ƽ��λ�ú��ٶ�֮���ƫ�������ֱ�Ϊ��
 (7)
(7)
Ϊ��Ƿ��㣬��������Ⱥ���λ�ú��ٶ�ƫ��ֱ�Ϊ��
![]() ��
��
![]() ��
��
�����i�������˺��쵼��֮���λ��ƫ���������ٶ�ƫ�������ֱ�Ϊ��
![]() (8)
(8)
Ϊ��Ƿ��㣬��������Ⱥ���λ�ú��ٶ�ƫ��ֱ�Ϊ![]() ��
��![]() ����
����
![]() (9)
(9)
��![]() ����
����![]() ����Ȼ
����Ȼ![]() �����Ⱥ�����ܿ�дΪ
�����Ⱥ�����ܿ�дΪ![]() �����Ƶأ�������i�Ŀ���Э���дΪ
�����Ƶأ�������i�Ŀ���Э���дΪ
![]()
![]() (10)
(10)
���ҷǸ�ֵ��������(6)�ɼ�Ϊ��
![]() (11)
(11)
��ȻVe�����붨����������Ϊ
![]()
����
 (12)
(12)
��ΪL1(t)��![]() �������붨����c1>0��c2>0��c1L1(t)��
�������붨����c1>0��c2>0��c1L1(t)��![]() Ҳ�����붨������ˣ�
Ҳ�����붨������ˣ�![]() ���Ӷ��ɵ�
���Ӷ��ɵ�![]() ����Ve(t)���н�ģ�����ζ��
����Ve(t)���н�ģ�����ζ��![]() ��ev���н�ġ��ɴ˼�
��ev���н�ġ��ɴ˼�![]()
![]() ��
��![]() ��
��![]() ���н��Կ�֪
���н��Կ�֪![]() ���н�ģ�
���н�ģ�![]() ����ʱ��t��һ�������ġ���ô
����ʱ��t��һ�������ġ���ô
Ӧ��Barbalat�����ɵ�![]() ��
��
��ʽ(12)�еĵ�1��д�ɶ���ʽ����ʽ��
![]() (13)
(13)
����![]() ��
��![]() �ֱ���ev��X���Y��ķ���������ͼG1����ͨͼ����L1��Ӧ�ڵ�һ������ֵ��������
�ֱ���ev��X���Y��ķ���������ͼG1����ͨͼ����L1��Ӧ�ڵ�һ������ֵ��������
����1������![]() ���
���![]() ��
��
![]() ������
������![]() ����
����
![]()
��ʽ(4)֪����������i���쵼��l���ھӣ���![]() ����Ӧ�Խ�Ԫ��
����Ӧ�Խ�Ԫ��![]() Ϊ1������Ϊ0��������ǶԽ�Ԫ��ʼ��Ϊ0��Ϊ��ʧһ���ԣ��ɼ���N���������н���ǰNl(0<>l<>
Ϊ1������Ϊ0��������ǶԽ�Ԫ��ʼ��Ϊ0��Ϊ��ʧһ���ԣ��ɼ���N���������н���ǰNl(0<>l<>![]() ת����ǰNl���Խ���Ԫ�ض���1������Ԫ�ض���0�ľ���
ת����ǰNl���Խ���Ԫ�ض���1������Ԫ�ض���0�ľ���![]() ����
����
 (14)
(14)
��ʽ(12)�еĵ�2��
![]() (15)
(15)
���
![]() (16)
(16)
�Ӷ���ʽ(7)��(8)��(13)��(15)�ɵã���![]() ʱ����
ʱ����![]() ���ʶ������еĸ����ٶȣ���
���ʶ������еĸ����ٶȣ���
![]() (17)
(17)
����1(Ⱥ��ṹ�ȶ���)����ϵͳ�ȶ�ʱ��Ⱥ��������2����ͬ����i��j֮��ľ���![]() ���ֺ㶨��
���ֺ㶨��
֤����Ⱥ��������2����ͬ����i��j���ƽ��
![]() ��
��
![]()
��ʽ(17)��![]() ����
����
![]()
������2����ͬ����i��j֮��ľ����ƽ�����䣬Ҳ���ǵ�ϵͳ�ȶ�ʱ��Ⱥ��������2����ͬ����i��j֮��ľ���![]() ���ֺ㶨��
���ֺ㶨��
����2(Ⱥ������������)�� ���ڶ����е�Ⱥ��������ٶ�һ�µ��쵼��Խ��ʱ��Ⱥ��������ٶ�Խ�졣
֤�������ڶ�����Ⱥ���м���M(M>1)���쵼��ʱ�����������ĵ���Ϊ��
���ڶ�����Ⱥ���м���M-1���쵼��ʱ�����������ĵ���Ϊ��
��ô��![]() �����ɶ���֪
�����ɶ���֪![]() ��
��![]() ��
��
����Ϊ![]() �����붨����c2>0��
�����붨����c2>0��![]() Ҳ�����붨������ˣ�
Ҳ�����붨������ˣ�![]() �����֪�ڶ�����Ⱥ���м���M(M>1)���쵼�߱ȼ���M-1���쵼�������ٶȿ죬�Ӷ�����2��֤��
�����֪�ڶ�����Ⱥ���м���M(M>1)���쵼�߱ȼ���M-1���쵼�������ٶȿ죬�Ӷ�����2��֤��
����������1˵����������Ⱥ�����˽ṹ��ͨ�ļ��������£�Ⱥ����������쵼���ܹ��������и����ӽ������ٶȣ�ͬʱȺ��������2����ͬ����ļ�ౣ�ֺ㶨����ͨ�������쵼���ܹ�ʵ��Ⱥ���ٶȿɿص�Ŀ�ģ�����ʹȺ������˽ṹ�ﵽһ���ȶ�״̬������2˵��Ⱥ���м�����쵼�ߵĸ�����Ⱥ��������ٶ���Ӱ�죬���쵼�߸���Խ��Ⱥ�������ٶ�Խ�죬��˿�ͨ�������쵼�߸��������Ⱥ�������ٶȡ�
���Ͽɼ�������������Ƶķֲ�ʽ�����������£��ܹ�ʵ��Ⱥ�������Ⱥ��ϵͳ���ٶȿɿ��ԣ��ṹ�ȶ����Լ����������쵼��ʱ���еĿ��������ԡ�
3 ����ʵ�������
����ʵ����ģ���˷ֱ���в�ͬ��Ŀ�쵼�ߵ�Ⱥ��ϵͳ�ڶ�ά�ռ��е��˶�������ֱ������Ⱥ����˶��켣���ٶ��������ߺ��ٶ�ƫ����������֤���������۵���Ч�ԡ�
�ڱ�ʵ���У�Ⱥ���л����˵ĸ�����Ϊ30������ͨ�ŷ�Χ��Ϊd0=6 m�����л����˵ij�ʼλ���ڱ�֤����1��������������20 m��20 m�������������������ʼ�ٶ�Ҳ��0��1֮�������á�Ⱥ������������쵼�߸����ֱ�Ϊ1����2����3�����������쵼�ߵ�λ�ó�ʼλ��Ҳ�ڱ�֤����1��������������20 m��20 m����������������������쵼�ߵ��ٶȾ�����Ϊ��ʱ�䲻�ϱ仯��Ⱥ�������ٶ�ve= ![]() ����ʼ�ٶȾ�����Ϊ
����ʼ�ٶȾ�����Ϊ![]() �������ÿ�����ʽ(6)�е�
�������ÿ�����ʽ(6)�е�
![]()
����c1=3��c2=3��
��ͼ1��3�У�Ⱥ�������и���ij�ʼλ�������α�ʾ�������˺��쵼�ߵ���ֹλ�÷ֱ��ÿ���Բ��ʵ��Բ��ʾ���˶��켣�ֱ�����ɫϸ�ߺͺ�ɫ���߱�ʾ����ͼ4(a)��6(a)�У������˺��쵼�ߵ��ٶ����߷ֱ��û�ɫʵ�ߺͺ�ɫ���߱�ʾ��
3.1 �ṹ�ȶ�����֤
ͼ1(a)��ͼ2(a)��ͼ3(a)�ֱ��Ǿ���1����2����3���쵼�ߵĻ�����Ⱥ��Ⱥ���˶��켣��ͼ1(b)��ͼ2(b)��ͼ3(b)�ֱ�����Ӧ�Ĺ켣�յ�Ŵ�ͼ�����Կ�����Ⱥ���ܹ����쵼�ߵĸ�Ԥ�£�ʵ���ȶ���Ⱥ���˶�������2������֮�����Ծ�������������ķ�Χ�ڱ��ֺ㶨��������Կ���������Ⱥ����������ٸ��쵼�ߣ�Ⱥ������˽ṹ�������ܹ��ﵽ�ȶ���״̬����֤������1����Ч�ԡ�
3.2 �ٶȿɿ�����֤
ͼ4(a)��ͼ5(a)��ͼ6(a)�ֱ��Ӧ�ھ���1����2����3���쵼�ߵ�Ⱥ��Ⱥ���ٶȱ仯���ߡ���ͼ�ɼ����쵼������Ϊ�Ŀ��������£���ʱ��������ٶ��˶���Ⱥ���ܹ����쵼�ߵĸ�Ԥ�£�ʵ��Ⱥ�������и����Ⱥ���ٶ�ʸ��һ�£���������ʱ��������ٶȣ��붨���ķ�������Ǻϡ�
3.3 ������������֤
ͼ4(b)��ͼ5(b)��ͼ6(b)��ʾ�ֱ��Ӧ�ھ���1����2����3���쵼�ߵ�Ⱥ�������Ⱥ��ϵͳ���ٶ�ƫ��仯���ߡ���ͼ�ɼ����쵼�ߵ�����Ϊ3����Ⱥ���ٶ�������죬1���쵼�ߵ�Ⱥ�������ٶ��������ܵ���˵������Ⱥ�����쵼�����������ӣ�Ⱥ���ٶȵ������ٶȼӿ죬������2�н���һ�¡�
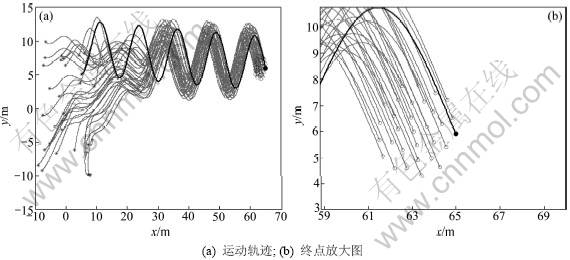
ͼ1 ����1���쵼�ߵ�Ⱥ��Ⱥ���˶��켣�켣�յ�Ŵ�ͼ
Fig.1 Trajectories and endpoints enlargement of swarm flocking with one controllable agent
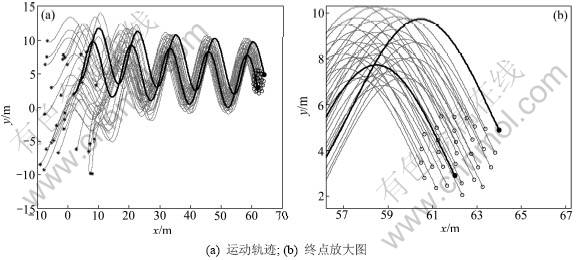
ͼ2 ����2���쵼�ߵ�Ⱥ��Ⱥ���˶��켣�켣�յ�Ŵ�ͼ
Fig.2 Trajectories and endpoints enlargement of swarm flocking with two controllable agents
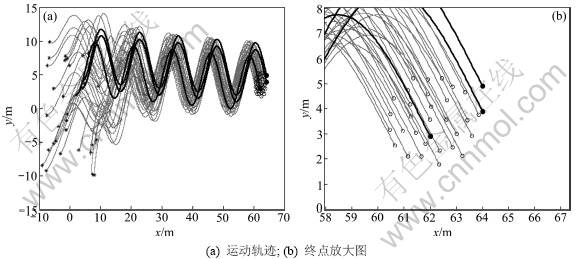
ͼ3 ����3���쵼�ߵ�Ⱥ��Ⱥ���˶��켣�켣�յ�Ŵ�ͼ
Fig.3 Trajectories and endpoints enlargement of swarm flocking with three controllable agents
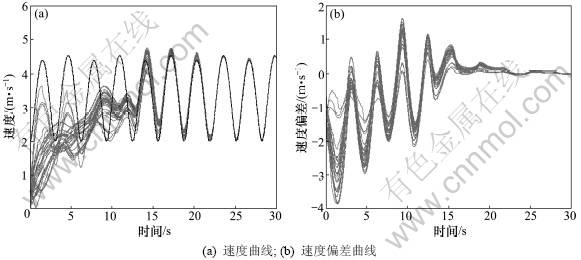
ͼ4 ����1���쵼�ߵ�Ⱥ��Ⱥ���ٶ����ߺ��ٶ�ƫ������
Fig.4 Velocity and velocity errors of swarm flocking with one controllable agent
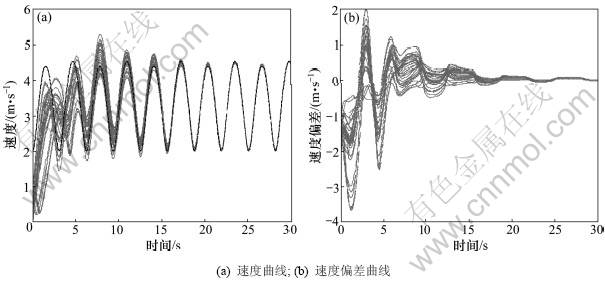
ͼ5 ����2���쵼�ߵ�Ⱥ��Ⱥ���ٶ����ߺ��ٶ�ƫ������
Fig.5 Velocity and velocity errors of swarm flocking with two controllable agents
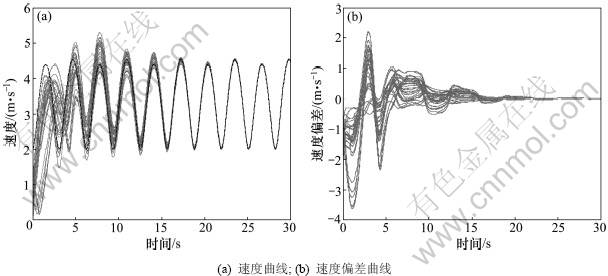
ͼ6 ����3���쵼�ߵ�Ⱥ��Ⱥ���ٶ����ߺ��ٶ�ƫ������
Fig.6 Velocity and velocity errors of swarm flocking with three controllable agents
4 ����
(1) Ϊ���Ⱥ���ٶȶ�̬�������⣬��Ⱥ������������̬�쵼�ߣ�ͨ�����쵼���ٶȵĿ��ƣ�ʹ����Ⱥ��ﵽʱ��������ٶȣ����ŵ���û���ƻ�Ⱥ��ľֲ���������
(2) �Ծ���ʱ�������ٶȵ�Ⱥ�������ϵͳ������˿����������ô���ͼ�ۺ�Barbalat�����������ȶ��Է�����֤���˿��Ʋ�����Ч��
�ο����ף�
[1] Okubo A. Dynamical aspects of animal grouping: Swarms, schools, flocks and herds[J]. Adv Biophys, 1986, 22: 1-94.
[2] Reynolds C W. Flocks, birds, and schools: A distributed behavioral model[C]//Proceedings of the 14th annual conference on Computer Graphics and Interactive Techniques. New York, 1987: 25-34.
[3] Vicsek T, Czirok A, Ben-Jacob E, et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Reviews Letter, 1995, 75(6): 1226-1229.
[4] Balch T, Arkin R C. Behavior-based formation control for multi-robot teams[J]. IEEE Trans on Robotics and Automation, 1998, 14(6): 926-939.
[5] Liu Yan-fei, Passino K M. Stable social foraging swarms in a noisy environment[J]. IEEE Trans on Autom Contr, 2004, 49(1): 30-44.
[6] Jin Dan, Gao Li-xin. Stability analysis of a double integrator swarm model related to position and velocity[J]. Transactions of the Institute of Measurement and Control, 2008, 30(3/4): 275-293.
[7] Jadbabaie A, Lin J, Morse A S. Coordination of groups of mobile autonomous agents using neighbor rules[J]. IEEE Transaction on Automatic Control, 2003, 48(6): 988-1001.
[8] Wang Zong-yao, Gu Dong-bing. Distributed leader-follower flocking control[J]. Asian Journal of Control, 2009, 11(4): 396-406.
[9] HAN Jin, LI Ming, GUO Lei. Soft control on collective behavior of a group of autonomous agents by a shill agent[J]. J Syst Sci Complex, 2006, 19(1): 54-62.
[10] �����, ������, �˿�Ӣ, ��. Ⱥ�嶯��ѧ��Эͬ�����о��е���������[J]. ����������Ӧ��, 2010, 27(1): 86-93.
Chu Tian-guang, YANG Zheng-dong, DENG Kui-ying, et al. Problems in swarm dynamics and coordinated control[J]. Control Theory and Applications. 2010, 27(1): 86-93.
[11] ��־��, ����. �����ϵͳ����ͨ��ͬ��[C]//��25���й����ƻ������ļ�, ������: �������պ����ѧ������, 2006: 373-378.
LIU Zhi-xin, GUO Lei. Connectivity and synchronization of multi-agent systems[C]//Proceedings of the 25th Chinese Control Conference, Harbin: Beihang University Press, 2006: 373-378.
[12] Tanner H G, Jadbabaie A, Pappas G J. Flocking in fixed and switching networks[J]. IEEE Trans on Automat Contr, 2007, 52(5): 863-868.
[13] �ױ�. Ⱥ�������ϵͳ������������[D]. �人: �人������ѧ��������ѧԺ, 2009: 84-97.
LEI Bin. Research on cooperative control problem of swarm robots system [D]. Wuhan: Wuhan University of Technology. School of Logistics Engineering, 2009: 84-97.
[14] Olfati-Sabe R. Flocking for multi-agent dynamic systems: Algorithms and theory[J]. IEEE Trans Automat Contr, 2006, 51(3): 401-420.
[15] Su Hou-sheng, Wang Xiao-fan, Lin Zong-li. Flocking of multi-agents with a virtual leader[J]. IEEE Trans on Automat Contr, 2009, 54(2): 293-306.
[16] Hong Yi-guang, Hu Jiang-ping, Gao Lin-xin. Tracking control for multi-agent consensus with an active leader and variable topology[J]. Automatica, 2006, 42: 1177-1182.
[17] Alavi Y, Chartrand G, Oellermann O R, et al. Graph theory, combinatorics, and applications[M]. New York: Wiley, 1991: 439-444.
(�༭ ���˱�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ��60675057�������ִ�ѧ��985���̡����̷����Ƽ�����ƽ̨��Ŀ(2010)
ͨ�����ߣ������Σ�1958-�����У�������ƽ�ˣ����ڣ���ʿ����ʦ�����·ֲ�ʽ����ϵͳ�о����绰��0431-85095769��E-mail��tianyt@jlu.edu.cn
ժҪ���о��ڲ��ƻ�Ⱥ��ϵͳ�ֲ���������������Ⱥ���ٶȶ�̬�ɿص����⡣�ھ���ʱ�������ٶȵ�Ⱥ�������ϵͳ�м�������̬�쵼�ߣ���ƻ��ھֲ���Ϣ�����ķֲ�ʽ��������Ϊ��֤����Ⱥ�����˽ṹͼ����������ͼ������Barbalat���������ȶ��Է�����֤���ھֲ���Ϣ������ͨ�����쵼��ʩ�ӿ��ƣ��ܹ�ʹϵͳ�е����и�����ٶ�ʸ��������ʱ������ֵ��ʹȺ���γ��ȶ��ṹ��ͬʱ֤�������쵼��Խ�࣬Ⱥ���ٶ�����Խ�졣����ʵ���������ÿ��Ʋ�����Ч��
