
���ڲ���ʽ�������ʵ���ƶ���������������
����־1����� 2
(1. ������ͨ��ѧ ���������Ϣ����ѧԺ��������100044��
2. �й���ѧԺ�Զ����о��� ����ϵͳ�����ܿ�ѧ�ص�ʵ���ң�������100080)
ժ Ҫ��
��ʵ����δ֪��̬�������ƶ��������������ϣ�ͬʱ������δ֪��̬��������ǽ���㷨��ʵ�ֻ������������ɴ�����ʵʱ���ϵ������о����������������ķ�������ʡʱ����Ч���ص㣻������㷨������Ч�ԺͿɿ��ԡ�
�ؼ��ʣ�
�ƶ����������������������������
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0493-05
Rules-based autonomous obstacle avoidance for mobile robots
WANG Qi-zhi1, XU De2
(1. School of Computer Science and Information Technology, Beijing Jiaotong University, Beijing 100044, hina;
2. Key Laboratory of Intelligent Control of Complex Systems, Institute of Automation,
Chinese Academy of Sciences, Beijing 100080, China)
Abstract: A real time and autonomous obstacle avoidance method based on rules for mobile robots was presented. Wall- along algorithm was dynamically implemented in unknown environment without collision. The results show that this algorithm is time saving and no disturbance. The approaches proposed has effectiveness and reliability.
Key words: mobile robot; autonomous obstacle avoidance; rules control
Ŀǰ�ƶ������˵��˶����Ƽ����ѱ��㷺��Ӧ�õ���������ˡ�Σ�ջ�����ҵ�������Լ����̽������˵�Ӧ���о������˶����ƺ��˶��滮���ƶ������˵����еĹؼ����������������ϰ���Ļ�����,ʵ�ֻ����˻��ڴ�������֪��Χ����������ʵʱ����������������Ϊ�������������ĵ����⡣������ͨ����������֪��Χ�����������ɴ��������гɱ��ͣ���Ϣ�������������װ�ü������ܹ����㵼��Ҫ����ŵ㣬������ƶ��������ϵõ��˹㷺Ӧ�á�ĿǰһЩѧ�߶��ƶ�����������������������������о���Rahman��[1-3]���������ģ�����Ʋ���ʵ���ƶ������˶�̬���ϣ���ģ��������Ҫģ������ĺϳ�������ѡȡ���ȽϺ�ʱ��Lee [4]������ɴ����������Ȼ������ƶ�������˵�������, ���ַ���Ҫ��Ի��������˽ṹ����ϸ�֣�Huang��[5]����������ʵ�ֻ�������������, ��������ѧϰ��ѵ��������Ժ�ʱ��Khatib[6]�����˹��Ƴ������б��ϣ����˷�����ͨ��������ͨ���������˶�������Shoual��[7]����ʸ����ͼʾ��ʵ���ƶ�������ʵʱ���ϡ���������������ڹ�����ƣ�����ڲ�ȷ������̬��δ֪�����л������������ϵIJ������㷨��ʵ�ֻ���������ʵʱ�������������������㷨�������ϳɣ� ��ʡʱ�䣬ʵʱ�Ժã������ʺ�������ͨ��������������ڴ�������ǽ����κζ�̬δ֪�����У��ƶ������˶����Զ�̬ʵʱ���Ρ����ڹ���Ŀ��Ʋ���ʵ�����ƶ������˵��������ϣ�ʵ���������ɴ������ڷǽṹ�Ļ����л�����ʵʱ��̬�����ı��Ϲ��ܡ�ͨ��ʵ�飬���⽫�����˷���δ֪�Ļ����У������˾����������������ǽ�ߵĹ��ܣ���֤���㷨����Ч�Լ��ɿ��ԡ��о��������Ӧ�õ�Σ�յ���ҵ�����У��羮�������������ƶ�����������װ�м����˹Ũ�ȡ��¶ȵȴ�����װ�ã��ƶ������˿��Բ�����ǽ�ߵķ�ʽ�����ھ�����������Σ���ʵʱ̽�������Σ���������Ԥ�����˷��̶�������̽�����������ȱ�ݡ�
1 ���ɴ�������ʶ����Ĵ���
P3-DX�������ڽṹ�������16�����ɱ���Ϊǰ�������֣�ǰ��Գơ�ÿ�����ɴ�����֮������зֲ��Dz����ȵģ���ǰ�벿�ֲַ���ͼ1��ʾ(pioneer�����ֲ�[8])��������ɶ���Χ360�㷶Χ���ϰ���IJ�����

ͼ1 P3-DXǰ�벿���ɷֲ�ͼ
Fig.1 P3-DX sonar array
���ڽṹ���������֮���м������ϸ���ϰ�������2�������м�ʱ��������̽��ϰ������ä�������⣬�������ɴ������������ȵ����ƣ�ʵ�������P3-DX�ƶ���������ʱ��ⲻ��ֱ��С�ڻ����5 mm��ϸ���ϰ����ϸ�������ȡ������ⲻ�����壬�����˾ͻ����������ײ��
Ϊ�ˣ����о��ڿ�������У���ij�����ɻ������������ɵIJ���ֵͻȻ������ı仯ʱ���ڻ������˶��Ĺ����н�������ʻ�ٶȣ�����ת��һ���ĽǶȣ�ͬʱ���в��������ɵIJ���ֵ���ж����Ƿ�Ϊ�ϰ�����ȷ��Ϊ�ϰ����ô��ȡ���ϴ�ʩ��
2 �ƶ��������˶�ѧģ�������
�ƶ��������˶�����ϵͳΪ������������˶�ѧģ�ͣ�
 (1)
(1)
���������������![]() ��
��![]() ��
��
���У�![]() ��ʾ�����˵�λ�ã�
��ʾ�����˵�λ�ã�![]() ��ʾ�����˵ķ�λ��v�ͦطֱ��ʾ�����˵����ٶ�����ٶȣ�l��ʾ�����˵�˫��֮����룻vR��vL�ֱ�Ϊ�������������ٶȡ�
��ʾ�����˵ķ�λ��v�ͦطֱ��ʾ�����˵����ٶ�����ٶȣ�l��ʾ�����˵�˫��֮����룻vR��vL�ֱ�Ϊ�������������ٶȡ�
��ʵ�ʿ����в�ȡ���ƻ������������ٶ�ʵ���˶����ƣ�ͼ2Ϊ��ȷ�˶����Ƶ�Ч��ͼ��ͼ��ʵ�����P3-DX�����ˣ���������̶�1�����Ƶļ���ɳ©�����ÿ�Ȫˮƿ���ã�����ƿ����1��С�ף�ɳ�ӿ���©�������������ĵ���˶��켣��Ϊ�����˵��˶��켣�������������������е���Բ���˶�ʱ�����˶��켣���ǰ뾶��ȵ�Բ���ʲ����������������ĵ���˶��켣�� ���ԣ��������������ɳ©��������˶��켣����ͼ2���Կ�����P3-DX�����˴ӳ�ʼ����1�ܺ�ܺõػص���ʼ�㡣����ȷ�˶������ǻ����˽�op��·���滮�Ļ����ͱ��ϡ�

ͼ2 P3-DX�������˶����ƾ�ȷ��Բ
Fig.2 P3-DX mobile robot accurate motion control
3 ���ڹ�����ϵĿ��Ʋ���
�ƶ�������ͨ��װ�������ɴ�������û����˵��ϰ���������Ϣ�������ɶ�ȡ������Ϊ���ݣ�����ǰ������ľ��롢��ǽ�ľ��롢��ǽ�ĽǶ���3��Ҫ�صIJ漯��Ϊ�����˵�ǰ��״̬�ռ䡣���ϵĿ��Ʋ������£�Frontok ��ʾ������ǰ�������������ز�����Walldisok ��ʾ�����˺�ǽ֮��������ز�����Poseok ��ʾ�����˺�ǽ֮��Ƕȵ���ز�����Goodtogo��ʾ�����Ƿ��ڰ�ȫ�ı������������ ��Ϣ��3����Σ���һ���涨��ȫ���룬�����������ϰ������С���룬�ٽ������˾Ϳ������ϰ������ײ���������ڴ˾������ڻ�����Ҫֹͣ����; �� ����������������Զ������ˣ������ڴ˷�Χ��ǰ���ϰ��ﲻ���ɶԻ����˵���в�����ǻ����˵������ٶ�����һ������������Ȼ������ײ�����迼�DZ��ϡ�Poseok��״̬���ж����£�Poseok��5��������-2��-1��0��1��2����ʾ��������ǽ��֮��Ĺ�ϵ��0��ʾ�����˻�����ǽƽ�У��ж�������0�����ɺ�15�����ɶ����IJ�ֵ������ֵС��10 mmʱ���ж�Poseok=0�����Կ���0�����ɺ�15�����ɵ���������ƽ����ǽ���ˡ�Walldisok��״̬���ж����£�Walldisok��6��������-2��-1��0��1��2��3���ֱ��ʾ�����˺�ǽ֮����롰̫������������������������Զ������̫Զ�������ޡ��� Poseok��Goodtogo��״̬���ж����������ơ�������Ӧ�Ĺ������Ľ���Ҫ����������3��������
(1) �걸�ԣ��κ�һ��״̬����һ��������֮��Ӧ��
(2) �������ԣ�ͬһ״ֻ̬��Ψһ�������Ӧ�á�
(3) ������ԣ�Ӧ�ù������ì�ܵĽ����
���������߹����У������˸������������ݺ��������˶�״̬�����˶�λ��, �������˶��������û�״̬�任����������������״̬����Ӧ�Ĺ���ƥ�䣬�����ù���任״̬�����ڹ�����Ʋ���ʵ���ƶ��������������ϡ�
(1) ����������ǰ���ϰ�����붨��ΪDF����ȡֵ����Ϊ��
{LF��Զ(DF��3 000)��F����(600��DF��3 000)��N����(DF��600)}�ֱ��ʾԶ���С�����������Ϊ[0, 2]����Ӧ��ֵΪ��frontok��{LF��2��F��1��N��0}
DF�������һ��
(1) If DFΪF then speed=100
(2) Else If DFΪLF then speed=150
(3) Else DFΪN then frontok=0��
(2) �����������2������0�����ɺ�15�����ɲ�����ϰ������IJ�ֵ����ΪDL�����ǵ�ģ���Ӽ�Ϊ(����2)��
{LF��(DL��-100)��LN��(-100��DL��-10)��Z��(-10��DL��10)��RN��(10��DL��100)��RF��(DL��100)}��������Ϊ[-2, 2]
��Ӧ����ֵΪ��Poseok��{LF��-2��LN��-1��Z��0��RN��1��RF��2}
��1 DF�����
Table 1 DF rules table

��2 Poseok ��DL�����
Table 2 DL rules table at Poseok

(3) ���������������ٶȴ�С����ΪV��ģ���Ӽ�Ϊ(����3)��
{RL��(speed-120, speed+120)��RS��(speed, speed+ 60), LS��(speed-60, speed)��LL��(speed+ 120, speed- 120)��LT[���û�1] (-50, 50)}
��3 V�����
Table 3 V rules table

(4) ��ǽ�ľ��붨��ΪWD��ģ���Ӽ�Ϊ��{N0��(200��WD��370)��N1��(370��WD��430)��N2��(430��WD��700)��N3��(700��WD��2 000)��N4��(WD��2 000)}��������Ϊ[-1, 3]����Ӧȡֵwalldisok��{N0��-1��N1��0��N2��1��N3��2��N4��3 }������4��
��4 WD�����
Table 4 WD rules table at Walldisok
![]()
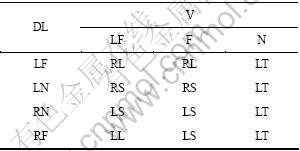
�������˶��������5��ʾ����DLȡֵΪZʱ����һ��������WD��DF���ɵĹ�����ƻ����˵��˶������ÿ�����ɲ�����ݶ�С��50��������ֹͣǰ���������ձ�5�еĹ�������˶���
��5 �������˶������
Table 5 Robot motion rules table
4 ��ǽ���㷨ʵ��
�ƶ������˹����״̬�ռ�SS=(WR, PR, FO)�����У�SS(State Space)Ϊ�����˵�״̬�ռ䣻WRΪ��������ǽ�ľ�����Ϣ��PRΪ�����˵���̬��FOΪǰ���ϰ���������˵ľ��롣
��������MobileSim���滷������ǽ���㷨����Ч��ͼ��ͼ3��ͼ4��ʾ��ʵ�������¹��ܣ�
�ڴ���ǽ���δ֪�����У����ƶ��������������һ��λ�ã������˿�������ʵʱ��̬��ǽ�ߣ��㷨������˳�ʼλ�������ء�ͼ3�л����˵ij�ʼλ��ΪS��
�㷨�����߳�U������������ֲ��������˿��������߳�ͼ4�����½ǵ�U�������Լ����Ͻǵ�U������
������ͨ�����ɴ�����ʵ��ʵʱ��̬���ϣ����ҽ������ɴ�����ʵ����ǽ�ߡ�
�����˿��Ը������ϰ����Զ���������н��ٶȡ�
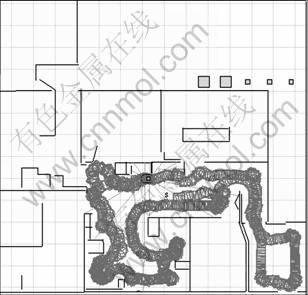
ͼ3 ��ǽ���㷨ʵ��Ч��ͼ
Fig.3 Wall along algorithm accomplishment

ͼ4 ���ӻ���������������������ǽ��
Fig.4 Robot autonomous obstacle avoidance and wall along algorithm in complex environment
ͼ3��ͼ4��ʾ��һ���ṹ���ӣ�������״������Ļ����������˶��乤���Ļ�������һ����֪���������ɴ��������������价�������ߡ����о�Ҳ�������˵Ļ����˱��ϲ��Խ�����ڻ�������Χ���������ϰ������������ս������û���κο������ѵĿ�϶��ʵ���л���������ͣ����û�����κ��ϰ�����ײ��ʵ������ڲ�ȷ������̬��δ֪�����л������������ϵ���Ч�ԺͿɿ��ԡ�
5 ����
(1) ����ij�����ɻ�����2�����ɵIJ���ֵͻȻ������ı仯ʱ��ȷ���Ƿ����ϰ�������P3-DXͨ�����ɴ�������ϸ���ϰ����ʶ�����⡣
(2) ������ڹ����������Ͽ��Ʋ��ԣ�ʵ���ƶ��������������Ϲ��ܣ��ڴ˻�����ʵ����ǽ���㷨���㷨����ʵʱ������δ֪��̬�Ļ���������ʡʱЧ�ʸߡ�
(3) ͨ��ʵ�������P3-DX ��֤���������������ϵ���Ч�Ժ߿ɿ��ԡ�
�ο����ף�
[1] Rahman N, Jafri A R. Two layered behaviour based navigation of a mobile robot in an unstructured environment using fuzzy logic, [C]// Proceedings of the IEEE International Conference on Emerging Technologies. Islamabad, 2005: 230-235.
[2] Thongchai S. Behavior-based learning fuzzy rules for mobile robots[C]// Proceedings of the American Control Conference.
Anchorage AK, 2002: 995-1000.
[3] �»�־, л����. �ƶ������˱���ģ������[J]. ������Һѹ, 2004, 11: 77-79.
CHEN Hua-zhi, XIE Cun-xi. Fuzzy control of obstacle avoidance for mobile robot[J]. Machine Tool & Hydraulics, 2004, 11: 77-79.
[4] Lee K. Topological navigation of mobile robot in corridor environment using sonar sensor[C]// Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, 2006: 2760-2765.
[5] HUANG Bing-qiang, CAO Guang-yi, GUO Min, Reinforcement learning neural network to the problem of autonomous mobile robot obstacle avoidance[C]// Proceedings of the Fourth International Conference on Machine Learning and Cybernetics. Guangzhou, 2005: 85-89.
[6] Shoval S, Borenstein J, Koren Y. Mobile robot obstacle avoidance in a computerized travel aid for the blind[C]// Proceedings of the 1994 IEEE Robotics and Automation Conference. San Diego, 1994: 2023-2029.
[7] Pioneer 3 Operations Manual January[M]. Amherst: Mobilerobots Inc, 2006: 1-69.
(�༭ ���˱�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ����������Ȼ��ѧ����������Ŀ(4082032)
ͨ�����ߣ�����־(1967-)��Ů�����������ˣ����о�Ա��˶ʿ����ʦ�����»����ˡ����ܿ��ơ��˹������о����绰��18610551319��E-mail: wangqzh@hotmail.com
ժҪ�����û��ڹ������ʵ����δ֪��̬�������ƶ��������������ϣ�ͬʱ������δ֪��̬��������ǽ���㷨��ʵ�ֻ������������ɴ�����ʵʱ���ϵ������о����������������ķ�������ʡʱ����Ч���ص㣻������㷨������Ч�ԺͿɿ��ԡ�
