
J. Cent. South Univ. Technol. (2010) 17: 991-999
DOI: 10.1007/s11771-010-0589-y
![]()
Node scattering manipulation based on trajectory model in wireless sensor network
PEI Zhi-qiang(����ǿ), XU Chang-qing(�����), TENG Jin(�پ�)
Department of Electronic Engineering, Shanghai Jiaotong University, Shanghai 200240, China
? Central South University Press and Springer-Verlag Berlin Heidelberg 2010
Abstract:
To deploy sensor nodes over the area of interest, a scheme, named node scattering manipulation, was proposed. It adopted the following method: during node scattering, the initial states of every node, including the velocity and direction, were manipulated so that it would land in a region with a certain probability; every sensor was relocated in order to improve the coverage and connectivity. Simultaneously, to easily analyze the process of scattering sensors, a trajectory model was also proposed. Integrating node scattering manipulation with trajectory model, the node deployment in wireless sensor network was thoroughly renovated, that is, this scheme can scatter sensors. In practice, the scheme was operable compared with the previous achievements. The simulation results demonstrate the superiority and feasibility of the scheme, and also show that the energy consumption for sensors relocation is reduced.
Key words:
wireless sensor network; node scattering manipulation; trajectory model; energy consumption��
1 Introduction
In recent years, much attention has been paid to the development of wireless sensor network (WSN), and many schemes have been presented [1-5]. They are classified into three categories: selecting active nodes intentionally [6-8], adjusting node transmitting power [2-3] and adopting mobile nodes [9-14].
Due to the network redundancy, only a part of sensor nodes are in the active state to save energy. KUMAR et al [6], ZOU and CHAKRABARTY [7], and WANG et al [8] discussed this problem, resolved the difficulty to select active nodes, and reached the following conclusions: determining the quantity of sensors required by WSN, ensuring the least sensors in the active state and guaranteeing the coverage and connectivity degree. In practice, the network topology needs to be controlled or adjusted [1-3], which is very suitable for the environment without the ability of attachment. For instance, LI et al [2] proposed a cone- based distributed topology control algorithm and proved that letting ��(�� is the degree of cone around one node) be equal to 5��/6 by adjusting transmitting power of nodes was a critical condition to guarantee the network connectivity.
After mobile sensors are adopted, the network topology in WSN can be automatically optimized. All of the proposed schemes or algorithms can be classed into the distributed [9, 11] and the center-controlled [10, 12-13]. The former is that every node exchanges information with its connected neighbors and determines its final position, independently. The later is that base station collects information from sensors, such as their ID and positions, and determines the final position of every sensor, to which these sensors would be relocated.
The previous achievements only focused on the following two aspects: the selection of optimal topology and the method to relocate sensor nodes by using mobile nodes. However, it has never mentioned the method to scatter nodes from aircraft. Resolving this problem is very practical and significant in many applications because the process of scattering nodes is prerequisite.
It is well known that energy is a key issue in WSN. All the efforts should be focused on decreasing energy consumption. In previous works, the extra energy had to be consumed in order to improve the coverage and connectivity, which were the key objectives of WSN, that is, the previous achievements were at the price of node energy. It would be a creative innovation, while all or part of energy, consumed by sensors during their relocation, was replaced by that of other devices. Therefore, a scheme, named node scattering manipulation, was proposed to resolve the above problem. The following two aspects presented the basic idea of this scheme: first, during node scattering, the initial states of every sensor, including the velocity and direction, were manipulated so that it could land in a region with a certain probability; then, every sensor node was relocated in order to improve the coverage and connectivity. Our scheme receives the following virtues:
(1) Practical. It is easy to realize our scheme in practice.
(2) Saving energy. The reason is that all or part of energy, consumed by sensors during node relocation, is replaced by that of scattering device.
(3) Improving coverage. This will be expatiated in section 4.
(4) Approximate ideal topology. Every sensor is near to its ideal position after landing on the ground.
Whichever deployment scheme is adopted, it is unavoidable that sensors randomly land on the ground and that the coverage holes must exist. This problem belongs to inter-discipline. It is necessary to study the trajectory model and stochastic distribution of sensors falling on the ground. Obviously, many uncertain factors have a significant impact on sensors during their descent. But, in this work, only the following factors are considered: gravity, wind force and air resistance. Among them, gravity is a constant, because it is related to sensor weight, and the others are regarded as stochastic variables.
It was necessary to point out that, in this work, only one node was scattered every time. Obviously, this was not efficient, and was also not suitable for the applications, under which a cluster of sensors were scattered every time. Thus, in the future, we will study the scheme.
2 Preliminaries
2.1 Notations throughout this work
![]() and
and ![]() The ideal and actual positions of one sensor.
The ideal and actual positions of one sensor.![]() and
and ![]() are their coordinates, respectively.
are their coordinates, respectively.
pp: The position of a flying plane while one sensor is cast. (ppx, ppy, ppz) are its coordinates.
ps(t): The position of one sensor at time t during its descent. (psx(t), psy(t), psz(t)) are its coordinates.
vs(t): The velocity of a sensor at time t during its descent. Its initial velocity vs(0) is equal to vp+vss, where vp is the velocity of a flying plane, and vss is the relative velocity of one sensor to vp at t=0.
In this work, the units of all kinds of variables are as follows: length, m; velocity, m/s; time, s; mass, kg; acceleration, m/s2; force, N; influence factors kw and kar, N?s/m; area, m2.
2.2 Assumptions on sensors and network configuration
(1) All sensors can accurately obtain their own location via certain localization techniques, such as GPS (global positioning system) or positioning algorithms.
(2) All sensors have the same configuration. In other words, they have the same transmitting and sensing ranges, computation capability, storage memory, available energy etc.
(3) All sensors have the limited movement capability, i.e., they can adjust their own positions like the schemes in Ref.[13]. The maximum movement distance is Dm.
(4) All sensors have the same shape and mass. Without loss of generality, let m be a constant which represents the mass of every sensor.
(5) The area of interest is supposed to be a 2-D plane. To be consistent with 3-D space, a point in the monitored area is also described as 3-D vector p=(px, py, pz), where pz is the constant.
(6) Every sensor can transmit its data packets without collisions via certain medium access control protocols.
2.3 Projectile motion
The motion trajectory of a projectile has been studied in physics. Without loss of generality, the expression
![]() (1)
(1)
denotes the position of one sensor falling on the ground. This model does not take other factors into consideration except for the gravitation. Here, it is easy to receive the following formulas:
![]() (2)
(2)
![]() (3)
(3)
In practice, it is difficult to know the accurate landing positions of air-borne sensors, because there are many uncertain factors, among which the air turbulence, more commonly called the wind force, and air resistance play a major part. So, it is necessary to study the impacts of wind force and air resistance on projectile motion during sensor descent.
2.4 Impact of wind force on projectile motion
According to physics, wind has a significant influence on a falling object. It is difficult to accurately describe this influence. However, in this work, an influence factor, kw, is defined to describe it.
A model is first established to demonstrate the wind. Though the wind often changes its direction and intensity, yet it still can be considered to be relatively stable and constant during the flying period of a dropping node. So, it is supposed that the parameters of wind, namely, bearing and intensity here, are random and independent among different air-borne sensors, and are unchanged during the descent of one air-borne sensor node.
Suppose that the wind velocity, vw, would be a vector parallel to the level ground surface. Without loss of generality, vw=(vwx, vwy, vwz), where vwz is equal to zero. vw can be also expressed as another 3-D vector under the polar coordinate system: vw=(vw, ��, ��), where vw=|vw|, 0�ܦȡ�2��, and ��=��/2 because of vwz=0.
To describe the randomness of vw, define two random variables, vw and ��. Their distribution was uniform over the interval [v1, v2] and [��1, ��2], respectively.
A force, Fw, can be initiated on a projectile object while the wind acts on this object. Here, Fw can be written as:
Fw=kwvw, kw��0 (4)
While a falling object is influenced by only two forces: the gravity and wind force, Fw will be changed depending on different values of kw, that is, one sensor node will land on different positions, as shown in Fig.1. Here, the following parameters are adopted. m=0.5 kg, vs(0)=(10 m/s, 0 m/s, 0 m/s), |vw|=20 m/s, ��=��/3, and pp=(0 m, 0 m, 100 m).
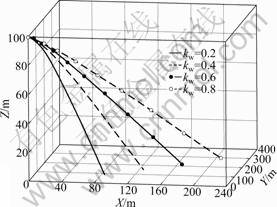
Fig.1 Impact of wind on projectile object
2.5 Impact of air resistance on projectile motion
Air resistance, Far, is significantly influenced by many factors, such as the shape and velocity of a falling object. Here, a model is established to demonstrate the impact of air resistance. The shape of a falling object is supposed to be globose, and its impact on air resistance can be regarded as a constant. The velocity of a falling object also has significant impact on air resistance during the descent of this object. Without loss of generality, let kar be a factor to describe the influences of air resistance, thus, Far is written as:
Far=-karvs (5)
Different results of Far, depending on different values of kar, are shown in Fig.2. Here, the following parameters are adopted: m=0.5 kg, vs(0)=(10 m/s, 0 m/s, 0 m/s) and pp=(0 m, 0 m, 100 m).
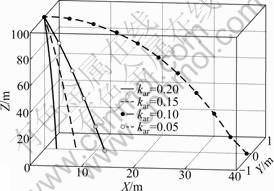
Fig.2 Impact of air resistance on projectile object
2.6 Trajectory of projectile motion
One sensor is significantly influenced by many factors during its descent. In this work, other factors are ignored except for the gravity, wind force and air resistance. It is not so unreasonable to posit that the force, F(t), acted on a sensor, is the sum of all the forces compelled on the sensor. Therefore, F(t) is written as:
F(t)=Fw+Far+G=kwvw-karvs(t)+G (6)
According to the physics, ps(t), defined in section 2.1, can be written as:
![]() (7)
(7)
3 Node deployment scheme
In previous achievements, the network topology was optimized by manpower deployment or by sensor relocation. In this work, a scheme, named node scattering manipulation, was designed to deploy sensors over the area of interest. This scheme can reduce the energy consumption during node relocation. Simultaneously, a trajectory model was proposed to describe the descent of one sensor.
3.1 Scattering manipulation of sensor nodes
The process of scattering sensors is shown in Fig.3. While one sensor is thrown out of a plane, it is initialized with velocity vss, and it falls on the ground according to the projectile motion trajectory. The launching device, like a pistol, can be adopted to drive a sensor flying. The

Fig.3 Scattering process of sensors by plane
driving force is not from powder, but from gases at high pressure. In order to improve the deployment efficiency, multiple sensors can be cast at a time, which will be studied in the future.
According to formulas (1)-(3), it is easy to calculate the ideal landing position of every sensor. The initial position and velocity of a flying plane are pp and vp, respectively, and those of one air-born node are also pp and vs, respectively. Therefore, the ideal position of one air-born node falling on the ground is expressed as:
![]() (8)
(8)
where![]()
![]() ppy+
ppy+
![]() and
and ![]()
![]() . In particular, Fx, Fy and Fz are the components of F(t), i.e., F(t)=(Fx, Fy, Fz).
. In particular, Fx, Fy and Fz are the components of F(t), i.e., F(t)=(Fx, Fy, Fz).
3.2 Landing point
The landing deviation from desired position for each sensor can now be expressed by the superposition of two stochastic processes, namely, the passive deviation driven by wind force and original deviation complying with a normal distribution.
First, the random variable, vw, is analyzed. It has been mentioned that vw and �� are two random variables with uniform distribution over the interval [v1, v2] and [��1, ��2], respectively. Let fpd(?) be the probability density function of the relevant variable. According to probability and statistics for engineers, the probability density functions fpd(vwx) and fpd(vwy) in 3-D right-angle coordinate system can be deduced as Eqs.(9) and (10), respectively:
 (9)
(9)
where
![]()
![]() ;
;
and ![]()
 (10)
(10)
where ![]() and Cvwy2=Cvw?
and Cvwy2=Cvw? ![]()
Then, the velocity of a sensor at time t during its descent is analyzed. vs(t) is deduced as follows:
 (11)
(11)
where ![]()
![]() Cvsy=Cvsvwy+ vsy(0) and
Cvsy=Cvsvwy+ vsy(0) and ![]()
The falling process of one sensor is analyzed. Let T be the time of one sensor landing on the ground from aircraft. According to physics, position ps(T), on which one sensor lands, is deduced as:
![]() (12)
(12)
Substituting Eq.(11) into Eq.(12), ps(T) is optimized as:
 (13)
(13)
where ![]() Cpx=ppx-
Cpx=ppx- ![]()
![]()
![]() and
and ![]()
![]()
Next, we analyze fpd(psx(T)) and fpd(psy(T)) of point ps(T), on which one sensor node lands under the impacts of wind, air resistance and gravity. Because fpd(vwx) and fpd(vwy) are obtained, it is very easy to deduce the probability density function of ps(T) as follows:
 (14)
(14)
where ![]() ��
��![]() ��
��![]() and
and ![]() ��
��![]() ��
��![]()
At last, we analyze the probability density function of ![]() under the superposition of two independent random variables, namely, the passive deviation driven by all impact factors and the original deviation complying with a normal distribution N(��, ��), where ��(=(��x, ��y)) and ��(=(��x, ��y)) are the mean value and standard deviation of N(��, ��), respectively. It is further supposed that ��x and ��y are independent, so do ��x and ��y. Without loss of generality, let fpd(pnrpx) and fpd(pnrpx) be the probability density functions of N(��, ��) along x and y axis components, respectively, which indicate the random distribution of position of one sensor landing on the ground only considering the original deviation. Formally, fpd(pnrpx) and fpd(pnrpx) can be written as:
under the superposition of two independent random variables, namely, the passive deviation driven by all impact factors and the original deviation complying with a normal distribution N(��, ��), where ��(=(��x, ��y)) and ��(=(��x, ��y)) are the mean value and standard deviation of N(��, ��), respectively. It is further supposed that ��x and ��y are independent, so do ��x and ��y. Without loss of generality, let fpd(pnrpx) and fpd(pnrpx) be the probability density functions of N(��, ��) along x and y axis components, respectively, which indicate the random distribution of position of one sensor landing on the ground only considering the original deviation. Formally, fpd(pnrpx) and fpd(pnrpx) can be written as:
 (15)
(15)
Thus, the distributions of the position of one sensor node falling on the ground with all the impacts can be written as:
 (16)
(16)
Their distribution curves are shown in Fig.4. The following parameters are adopted: v1=2 m/s, v2=4 m/s, ��1=��/6, ��2=��/3, ��=(0 m, 0 m), ��=(10 m, 10 m), m=0.5 kg,

Fig.4 Curves of![]() (a) and
(a) and![]() (b)
(b)
g=9.8 m2/s, kar=0.05 N?s/m, kw=0.4 N?s/m, pp=(0 m, 0 m, 100 m) and vs=(10 m/s, 0 m/s, 0 m/s).
It is necessary to point out that the above two density distributions are deduced for single and independent node. Sensors in a batch, however, are not independent, because they undergo the same wind turbulence, which will be studied in the future. One more thing to say is that, the above model for wind is simplified to easily understand. Actually, the wind velocity vector is a 3-D vector instead of a 2-D one. So, there is a vertical component. In this work, falling time T is also a random variable influenced by that vertical wind speed. And to take this component into consideration, some other processing methods, mainly another integral, are required.
3.3 Sensor relocation
Once sensors are scattered, not all of them lie on their own ideal positions. Some sensors must be relocated to approach ideal deployment pattern. Here, a simple relocation scheme is applied. Its principle is that one sensor moves from its landing point to its ideal target position, and that its movement distance is d. The mobility of a sensor is limited, and its maximum movement distance is Dm [13]. One sensor is incapable of moving to its ideal target position while d��Dm, which leads to non-full-coverage or non-connectivity. The following lemma is proposed to study the coverage percentage.
Lemma 1 If and only if the probability of s lying in ![]() , p(s,
, p(s, ![]() ), is not less than P, the requirement of applications is satisfied after sensor relocation, where P is the coverage percentage required by some applications, and
), is not less than P, the requirement of applications is satisfied after sensor relocation, where P is the coverage percentage required by some applications, and ![]() is a disc of radius Dm centered at
is a disc of radius Dm centered at![]() .
.
Proof It is assumed that M nodes are deployed over the target area. Let M1 be the number of nodes that lie in their own disc![]() .
.
If According to the statistics principle, the following expression always holds:
![]() .
.
This expression indicates that M1 of M sensors land in their own disc![]() . The coverage percentage is M1/M after sensor relocation, which approaches to p(s,
. The coverage percentage is M1/M after sensor relocation, which approaches to p(s, ![]() ) while M����. Because p(s,
) while M����. Because p(s, ![]() )��P, the requirement of applications is satisfied after sensor relocation.
)��P, the requirement of applications is satisfied after sensor relocation.
Only if Because the requirement of application is satisfied after sensor relocation, at least MP nodes land in their own disc![]() ,
, ![]() . Due to M1
. Due to M1![]() Z+ and MP��M1, the following expression always holds:
Z+ and MP��M1, the following expression always holds:
![]()
Therefore, p(s, ![]() )��P.
)��P.
4 Simulation
In order to evaluate the performance of the scheme, the simulation was conducted using MATLAB language. The ideal deployment patterns in Refs.[15-16] were adopted, and the monitored target area was supposed to be 500 m��10 000 m. The main objectives are that sensors are forced to land as close to their own ideal position as possible, and that node energy consumption is decreased to great extent during node relocation.
In this section, metrics, which are the measurements of the proposed deployment scheme, are first stated. Then, the impacts of all kinds of factors on the deployment scheme are introduced and analyzed. Next, the cost is quantified. At last, two results, which are realized by the scheme and by that in Ref.[13], are compared.
4.1 Metrics
Let AR be the total area of the target region of interest, and let ACR be the area of region covered by sensors. The efficient coverage of WSN is defined as EC. Formally, EC is written as: EC=ACR/AR.
Let CIR be the coverage improvement of the monitored area. In order to easily analyze the performance of the deployment scheme, CIR is defined as:
![]() , where
, where ![]() and
and ![]() are areas of
are areas of
regions covered by sensors after and before sensor relocation, respectively.
Let Cs be the cost of all sensors during their relocation. Without loss of generality, the value of Cs is defined as the sum of the movement distance of every sensor.
At last, it must be pointed out that the scattering device deploys only one sensor node at a time.
4.2 Effective coverage of WSN
The target area is fully covered while all the sensor nodes lie on their ideal positions. In practice, it is difficult for us to achieve this object. Therefore, node relocation scheme is adopted. Fig.5 describes the effective coverage performance of our deployment scheme. It is necessary to point out that EC��![]() , and here, this is explained. Because the distance of two connected neighboring sensors is 2rs instead of
, and here, this is explained. Because the distance of two connected neighboring sensors is 2rs instead of ![]() or other values in Refs.[8, 15-16], thus, the following
or other values in Refs.[8, 15-16], thus, the following
expression always holds: EC��![]()
![]() , where l and w are the length and width of the target area, respectively.
, where l and w are the length and width of the target area, respectively.
While the value of �� is unchanged, which decides the concentrated degree of node distribution, EC is approximately stable before node relocation. The reason is that �� is consistent while WSN is deployed repetitively. However, EC increases with the increase of Dm after node relocation, because more sensors are relocated to their ideal positions, as shown in Fig.5(a).
While the value of Dm is unchanged, EC continuously decreases with the increase of �� before node relocation, because the node distribution is sparser, i.e. more regions are not covered by any sensors. After sensors are relocated, EC is improved largely. For instance, EC is improved by about 30% at Dm=50 and ��=(15, 15). Here, this is explained. Sensors are close to their ideal positions while the value of �� is small, i.e., almost all of them can be relocated to their own ideal positions due to p(s, ![]() )��1. Therefore, EC can be improved to upper limit
)��1. Therefore, EC can be improved to upper limit ![]() However, due to the limited movement distance, more sensors lose the capability of being relocated to their ideal positions while the value of �� is gradually increased, i.e., EC is smaller than upper limit
However, due to the limited movement distance, more sensors lose the capability of being relocated to their ideal positions while the value of �� is gradually increased, i.e., EC is smaller than upper limit ![]() and has the descending tendency with the increase of ��, as shown in Fig.5(b).
and has the descending tendency with the increase of ��, as shown in Fig.5(b).
4.3 Impact of all kinds of factors on EC
The impacts of Dm and �� on EC have been analyzed in section 4.2, here, those of kar and kw on EC are investigated.
As shown in Fig.6(a), EC gradually decreases with the increase of kar, which results from the following reasons. According to formula (5), the variation of kar will result in the change of FAR. Thus, kar has a significant impact on the landing point of one sensor. As shown in Fig.2, sensors are further away from their ideal positions while the value of kar is larger, i.e., the node distribution is sparse and uneven with the increase of kar.
There is the same explanation for the impact of kw on EC (Fig.6(b)).
4.4 Costs of plane or sensors
Obviously, the curve tendency of Cs is increasing at initial stage, and finally, it is stable, while all variables are increasing, as shown in Fig.7. The reason is that more cost must be paid to improve the coverage, and that the effective coverage is approximate to upper limit ![]()
In order to test the performance of this deployment scheme, we provide the comparison between our scheme and that in Ref.[13], as shown in Fig.8. Obviously, this deployment scheme improves the coverage percentage extremely and deduces the deployment cost greatly while the value of Dm is larger.
5 Conclusions and future work
(1) An effective deployment scheme, named node scattering manipulation based on trajectory modeling, is proposed to deploy sensors. This scheme ensures that every sensor lands on the ground as near to its ideal position as possible, decreases the energy consumption during its relocation, saves the total energy of network, and improves the network characteristics. In practice, this scheme is operable and can be realized easily. Simulation results demonstrate the superiority of this deployment scheme.
(2) Only one sensor is thrown out of a plane at a time. This scattering method is of low efficiency and not suitable for the WSN application of massive sensors, although it can provide the theoretical foundation for
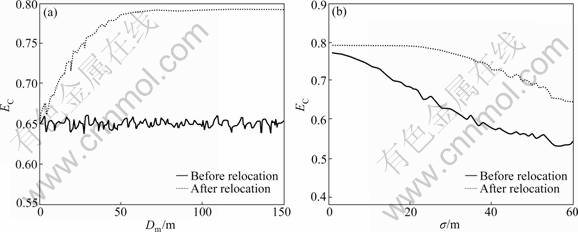
Fig.5 Efficient coverage of WSN: (a) ��=(15 m, 15 m); (b) Dm=50 m

Fig.6 Impacts of kar and kw on EC: (a) Dm=50 m, ��=(15 m, 15 m), kw=0.4 N?s/m; (b) Dm=50 m, ��=(15 m, 15 m), kar=0.05 N?s/m

Fig.7 Impacts of Dm, kar, kw and �� on Cs: (a) ��=(15 m, 15 m), kar=0.05 N?s/m, kw=0.4 N?s/m; (b) Dm=50 m, ��=(15 m, 15 m), kw= 0.4 N?s/m; (c) Dm=50 m, ��=(15 m, 15 m), kar=0.05 N?s/m; (d) Dm=50 m, kar=0.05 N?s/m, kw=0.4 N?s/m
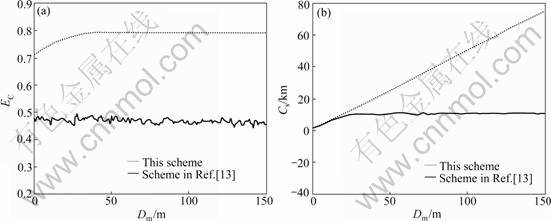
Fig.8 Comparison between this scheme and scheme in Ref.[13]: (a) EC vs Dm; (b) Cs vs Dm
studying node deployment. Thus, in the future work, we will study the deployment scheme, which can scatter multiple sensors or a cluster of sensors at a time, and further study the trajectory modeling during the descent of multiple sensors.
References
[1] HOWARD A, MATARI? M J,SUKHATME G S. An incremental self-deployment algorithm for mobile sensor network [J]. Autonomous Robots: Special Issue on Intelligent Embedded Systems, 2002, 13(2): 113-126.
[2] LI L, HALPERN J Y, BAHL P, WANG Y M, WATTENHOFER R. Analysis of a cone-based distributed topology control algorithm for wireless multi-hop networks [C]// Proceedings of ACM Symposium on Principles of Distributed Computing. Newport, Rhode Island, 2001: 264-273.
[3] LI N, HOY J C, SHA L. Design and analysis of an MST-based topology control algorithm [J]. IEEE Transactions on Wireless Communications, 2005, 4(3): 1195-1206.
[4] TAN Chang-geng, XU Ke, WANG Jian-xin, CHEN Song-qiao. A sink moving scheme based on local residual energy of nodes in wireless sensor networks [J]. Journal of Central South University of Technology, 2009, 16(2): 265-268.
[5] MA C L, INOUE A, ZHANG T. Ultrahigh performance of Ti-based glassy alloy tube sensor for Coriolis mass flowmeter [J]. Transactions of Nonferrous Metals Society of China, 2006, 16(s): s202-s205.
[6] KUMAR S, LAI T H, BALOGH J. On k-coverage in a mostly sleeping sensor network [J]. Wireless Networks, 2008, 14(3): 144- 158.
[7] ZOU Y, CHAKRABARTY K. A distributed coverage- and connectivity-centric technique for selecting active nodes in wireless sensor networks [J]. IEEE Transactions on Computers, 2005, 54(8): 978-991.
[8] WANG X R, XING G L, ZHANG Y F, LU C Y, PLESS R, GILL C. Integrated coverage and connectivity configuration in wireless sensor networks [C]// Proceedings of the 1st International Conference on Embedded Networked Sensor Systems. Los Angeles, 2003: 28-39.
[9] WANG G L, CAO G H, la PORTA T. Movement-assisted sensor deployment [J]. IEEE Transactions on Mobile Computing, 2006, 5(6): 2469-2479.
[10] WU Jie, YANG Shu-hui. Smart: A scan-based movement-assisted deployment method in wireless sensor networks [C]// The 24th Annual Joint Conference of IEEE Computer and Communications Societies. Miami, 2005: 2313-2324.
[11] ZOU Y, CHAKRABARTY K. Sensor deployment and target localization based on virtual forces [C]// The 22nd Annual Joint Conference of the IEEE Computer and Communications Societies. San Francisco, 2003: 1293-1303.
[12] WANG G L, CAO G H, la PORTA T, ZHANG W S. Sensor relocation in mobile sensor networks [C]// The 24th Annual Joint Conference of the IEEE Computer and Communications Societies. Miami, 2005: 2302-2312.
[13] CHELLAPPAN S, BAI X L, MA B, XUAN D, XU C Q. Mobility limited flip-based sensor network deployment [J]. IEEE Transactions on Parallel and Distributed Systems, 2007, 18(2): 199-211.
[14] HOWARD A, MATARIC M J, SUKHATME G S. Mobile sensor network deployment using potential fields: A distributed, scalable solution to the area coverage problem [C]// Proceedings of the 6th International Symposium on Distributed Autonomous Robotics Systems. Fukuoka, 2002: 299-308.
[15] KUMAR S, LAI T H, ARORA A. Barrier coverage with wireless sensors [C]// Proceedings of the 11th Annual International Conference on Mobile Computing and Networking. Cologne, 2005: 284-298.
[16] BAI X L, KUMAR S, XUAN D, YUN Z Q, LAI T H. Deploying wireless sensors to achieve both coverage and connectivity [C]// Proceedings of the 7th ACM International Symposium on Mobile Ad Hoc Networking and Computing (Mobihoc). Florence, 2006: 131- 142.
(Edited by YANG You-ping)
Foundation item: Project(2007AA01Z224) supported by National High-Tech Research and Development Program of China
Received date: 2009-11-13; Accepted date: 2010-03-25
Corresponding author: PEI Zhi-qiang, Doctoral candidate; Tel: +86-21-34204344; E-mail: pzqsjtu@sjtu.edu.cn; pzqjlu@sohu.com
