
һ�ֶ�����ģʽ��Ⱥ�㷨������·���滮�е�Ӧ��
����1, 2�����ư�3
(1. �������չ���ѧԺ �о���������ӣ�ɽ�� ��̨��264001��
2. �������չ���ѧԺ �Ӹ�װѵ����ӣ�ɽ�� ��̨��264001��
3. �������չ���ѧԺ ���ƹ���ϵ��ɽ�� ��̨��264001)
ժ Ҫ��
���ٶ����Լ�������ֲ���ֵ���ص㣬���һ�ֶ�����ģʽ��Ⱥ�㷨����ÿ���������ò�ͬ�Ĵ��ڿ��ȣ�������������������ԺͶ����ԣ�����һ��Ѱ����Ⱥ�߽�ģʽ�ķ���������㷨����Ч�ʡ������Ⱥ��ģ������Ӧ�仯�������������㷨�ڲ�ͬԼ�������½��������Է����������㷨����ʱ��Ĺ��Ʒ������״�ʱ��ֲ��ı�����ʽ����������㷨���ü������͵�TSP�����������Ⱥ�㷨�ͼ��ָĽ���Ⱥ�㷨���жԱȷ�����������Ķ�����ģʽ��Ⱥ�㷨Ӧ�������˻�(UAV)·���滮�С��о������������������㷨�����ڻ�����Ⱥ�㷨�����Ҵ���������������ָĽ���Ⱥ�㷨���š���������㷨�����·���滮��Ч�ʣ���������Ч�ع�ܶ�̬��в��
�ؼ��ʣ�
��������ģʽ����Ⱥ�㷨����������·���滮��
��ͼ����ţ�E955 ���ױ�־�룺A ���±�ţ�1672-7207(2013)09-3713-10
Multi-granularity pattern ant colony optimization algorithm and its application in path planning
LIU Zhen1, 2, HU Yunan3
(1. Department of Graduate Students�� Brigade, Naval Aeronautical and Astronautical University, Yantai 264001, China;
2. Training Brigade of Equipment Acceptance and Modification, Naval Aeronautical and Astronautical University, Yantai 264001, China;
3. Department of Control Engineering, Naval Aeronautical and Astronautical University, Yantai 264001, China)
Abstract: Aiming at the problem that ant colony algorithm takes a long time to converge and is easy to converge to local optimum, the multi-granularity pattern ant colony algorithm was proposed. The ants had different window sizes in the proposed algorithm to enhance the diversity of the ants, and a new pattern was also proposed in order to enhance the efficiency. The ant number could also vary according to the evolution condition. The convergence of the proposed algorithm was also analyzed in different conditions, and the convergence time and the first hitting time were given. The proposed algorithm was used for UAV path planning problem. The results show that the proposed algorithm performs better than the basic ant colony optimization (ACO) in the TSP problem and performs better in most of TSP problem compared with the reference article. The proposed algorithm is feasible and can promote the efficiency of path planning, and can also avoid moving threat efficiently.
Key words: multi-granularity; pattern; ant colony algorithm; convergence; path planning
��Ⱥ�㷨(ant colony optimization��ACO)��һ�ַ������ܽ����㷨��Dorigo��[1]��ϵͳ���ܽ�����Ⱥ�㷨��˼�롣������20����о���չ������Ⱥ�㷨���о����Դ��¸�����Ϊ���¼������棺
(1) ���㷨�����Ե��о�������Ⱥ�㷨�����Է����������Stutzle��[2-3]��Guitar[3]���һ�ֻ���ͼ�ε���Ⱥϵͳ����������������Stutzle��[2]��������������С����Ⱥϵͳ����������������Է�������������ѧ���ж���һ�����о�������лƺ���[4-5]���ƺ���[4]�о��˻�������̬Markov���̵���ѧģ�ͣ�����Ⱥ�㷨�������ٶȽ����˷�����Yu��[5]��������������ʱ��Ĺ��Ʒ�����
(2) ����Ⱥ�㷨��ģ�͡������ͽṹ���о������ĵ�[6]������С����֧����������ȡ�IJ����������������ķ�������[7]�����һ�ֶ�̬�Ĵ�����Ⱥ�㷨����ǿ�㷨��ȫ��Ѱ���ԣ���һ���̶��Ͽ˷�������ֲ���ֵ���⡣Wong��[8]���һ���µ������С����Ϣ����ֵ�������Կ˷�ԭ�е�ȱ�ݡ�
(3) �о���Ⱥ�㷨�����������Ļ�ϣ����������Ⱥ�㷨�����ⷽ���������Ҫ����Ⱥ�㷨���ݻ��㷨�Ľ��[9]����Ⱥ�㷨���Ŵ��㷨�Ľ��[10]�ȡ�
�ڲ�ȷ����ս�������¶����˻�(unmanned aerial vehicles��UAV)����·���滮�������UAV��������ʾ�����Ҫ���塣ս���е���в��Ϊ��̬��в�Լ���̬��в���ڸ����ӵ�ս�������л�����ͻ����в����ˣ��ڳ���ͻ����в�������Ч�ؽ���·���滮��������Ҫ����ʵ���塣����Ⱥ�㷨�����·���滮����ʱ���������ٶ�������������ֲ����Ž�����⡣�ڻ�����Ⱥ�㷨�У������˶���·��������������Ϣ����ǿ��·������Ϣ�ض������������ֲ����ŵ�·���ϣ�ʹ����·���ϵ���Ϣ��Ũ��ԶԶ��������·���ϵ���Ϣ��Ũ�ȣ��������е����϶����е������ֲ����ŵ�·���ϣ�����ͣ������Ҫ�����Ⱥ�㷨���Ż�Ч�ʣ����Դ�2�������֣�(1) Ϊ��������ٶȺͽ���Ч�ʣ������ϵĴ��ڽ��е���������Ӧ�ظ�����Ⱥ��ģ��(2) Ϊ�����ȫ���������ܣ�ʹ�価�����������Ž⸽�������оֲ���ϸ���������þֲ�����������Ѱ������ģʽ�������ֲ���ֵ��̽��ȫ�����Ž⡣
�������ϵ�˼�룬�������ߴ����ϴ��ڵ��趨�������ֲ��������Ժ�������Ⱥ�Ĺ�ģ���иĽ������һ�ֶ�����ģʽ��Ⱥ�㷨�������㷨���������Է����Լ�TSP����ķ�����֤���������㷨Ӧ����UAV·���滮���⡣
1 ������ģʽ��Ⱥ�㷨ʵ�ֹ���
1.1 ���������ϴ��ڵ�ʵ��
����Ⱥ�㷨�����Ĺ����У�Ϊ�������Ч�ʣ�������������äĿ�ԣ�ͨ���ɽ�������һ��Ҫѡ��Ľڵ�̶���һ�����ڷ�Χ�ڡ�����Ⱥ�㷨�������й����У�ͨ������Ӧ�����ķǾ��ȴ����������ϵ��ƶ���Χ�������������������ڵ�ͬʱ�ܹ���ʱ�����µĽ�ռ䣬�Ӷ��ܹ�������Ⱥ�㷨���õ������ֲ���С����������Ȼ����Ⱥ���������У�ÿһ������Ⱥ��Ĵ��ڿ����ܹ�����Ӧ�Ľ��е���������ijһ�ε��������У�����������Ȼʹ��ͬһ�����ڿ��ȣ���������ڿ���ֻ�ܷ�ӳ��ǰ���Ž�Ľ������������һ����ӳ������Ⱥ�������������һ����Ƭ���ԣ�������Ѱ��������ǿ�����ϵ�ȫ��Ѱ��������Ϊ���������Ѱ�Ź����е�����ԣ����Կ��Dz��ö����Ȼ��ƣ�ÿһֻ���ϸ��ݵ�ǰ������Ľ��������ӵ���Լ��Ĵ��ڿ��ȣ���ˣ��ڵ�t+1�ε��������У���i(i=1, 2, ��, m)�����ϵĴ��ڷ�Χ����Ϊ

 (1)
(1)
���У� Ϊ��t�ε��������е�i�����ϴ�����Ľڵ���Ŀ��
Ϊ��t�ε��������е�i�����ϴ�����Ľڵ���Ŀ�� Ϊ��t�ε����е�i������Ѱ�ҵ����Ž�ֵ��
Ϊ��t�ε����е�i������Ѱ�ҵ����Ž�ֵ�� Ϊ��ֹ����t����i��������Ѱ�ҵ������Ž�ֵ��
Ϊ��ֹ����t����i��������Ѱ�ҵ������Ž�ֵ�� ��ʾ����ȡ����
��ʾ����ȡ���� ��
�� �ֱ��ʾ��t�ε����͵�t+1�ε���ʱ�Ĵ��ڿ��ȡ�
�ֱ��ʾ��t�ε����͵�t+1�ε���ʱ�Ĵ��ڿ��ȡ�
1.2 �߽�����ģʽ�Ļ�ȡ����
��Ⱥ�㷨�ڽ���������Ѱ����Ⱥ������ģʽ��ͨ������ģʽָ��������������Ч����߽���Ч�ʡ���ģʽ����Ϊ�� (i=1, 2, ��, n, j=1, 2, ��, n)��nΪ�����ģ��
(i=1, 2, ��, n, j=1, 2, ��, n)��nΪ�����ģ�� ��ʾ��t������·��(i, j)���ֵ�Ƶ�ʡ�����Ⱥ���һ�ε����ٶ���kֻ�����ڵ�t�ε����õ��Ľ�Ϊ
��ʾ��t������·��(i, j)���ֵ�Ƶ�ʡ�����Ⱥ���һ�ε����ٶ���kֻ�����ڵ�t�ε����õ��Ľ�Ϊ ����ģʽ���¾�����Ա�ʾΪ
����ģʽ���¾�����Ա�ʾΪ
 (2)
(2)
���У�i=1, 2, ��, n, j=1, 2, ��, n����Ϊģʽ�����ʣ�
 (3)
(3)
��С���[11]���һ������PBIL�㷨Ѱ������Ⱥ�������ģʽ������������ģʽ�����¸�����н������������õ�ģʽͣ���ڶ���ģʽ�ĽΣ����ڵͽ�ģʽ�ķ�Χ����������һЩ����
����һ��·��Ѱ�����⣬�ٶ���ʱ��·��Ƭ������ ��
�� ��
�� ��
�� ����ģʽeik��ejhΪ����ģʽ������
����ģʽeik��ejhΪ����ģʽ������ ��
�� ʱ��
ʱ�� ��
�� ����ˣ�������ģʽ���ɵĽⲢ��һ��������ģʽ��
����ˣ�������ģʽ���ɵĽⲢ��һ��������ģʽ��
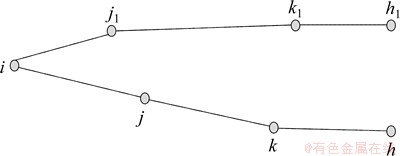
ͼ1 ģʽʾ��ͼ
Fig.1 Sketch map of pattern
Ѱ��߽�����ģʽ������������㷨��Ч�ʺ����ܡ����ǹ���ά����ģʽ���������㷨�ĸ����ԣ�ͨ��������������ڵͽ�TSP����һ���ȡ�����Ľ�ģʽ���ɣ����ڸ߽�TSP���⣬��ȡ6~7��ģʽ��
�����þ�������˵����λ�ȡ�߽�ģʽ���ٶ�ģʽ����������ʾ��
�� Ϊģʽ�ϲ����ʣ���
Ϊģʽ�ϲ����ʣ��� ʱ��eijΪ����ģʽ����ȡ�ù�����ģʽ���ӹ�ϵ�������㣬�˻�Ϊ��������Ⱥ��������̫С��������Ѱ�ŷ����ƫ�������ֲ���ֵ��һ��ȡ
ʱ��eijΪ����ģʽ����ȡ�ù�����ģʽ���ӹ�ϵ�������㣬�˻�Ϊ��������Ⱥ��������̫С��������Ѱ�ŷ����ƫ�������ֲ���ֵ��һ��ȡ ��
��
��ģʽ������Կ���e21��e34Ϊ����ģʽ����ʱ ��
�� Ϊ������������ģʽ����������ģʽ��
Ϊ������������ģʽ����������ģʽ�� ��ȡֵ��ΧΪ{3,4,5}������3��·��{2,1,3}��(2,1,4)��(2,1,5)�ij��ȣ�������·��������������ģʽ����G�С����ڴ�����������ģʽ Ҳ����ͬ�����������ο��Լ���4�������ϵ�ģʽ��
��ȡֵ��ΧΪ{3,4,5}������3��·��{2,1,3}��(2,1,4)��(2,1,5)�ij��ȣ�������·��������������ģʽ����G�С����ڴ�����������ģʽ Ҳ����ͬ�����������ο��Լ���4�������ϵ�ģʽ��
1.3 ��Ⱥ��ģ������Ӧ˥��
��Ⱥ��ģ���Ž������̵Ľ���ƽ�ȵ�˥�����������ڽ����ٶȵļӿ죬��Wu��[12]�����ķ��������ڸ���ʵ�ʵ����μ�ʱ����Ⱥ���е������Ӷ������ڽ���ȫ�ֺ;ֲ���������ǰ�����ýϴ��������Ⱥ������ȫ�ַ�Χ�ڽ��������������ҵ����Ž⣬�������Ž⸽�����оֲ�������������Ⱥ��ģ��������Ӱ���㷨��ִ��Ч�ʡ���ˣ����Կ�����Ⱥ����Ӧ�ظ��浱ǰѰ��������б仯������ǰѰ������Ϻ�ʱ����Ⱥ����Ӧ��ƽ�ȼ��٣�����Ⱥ����ֲ���ֵ����ͣ��ʱ���ʵ�������Ⱥ���͵��ٶȣ������ڸ��õ�Ѱ�ҵ�ȫ�����Ž⡣�趨�µ���Ⱥ�仯��ʽ(4)��ʽ(5)��ʾ������TΪ������������mΪ��ʼ��Ⱥ������
(1) ��T��mʱ��
 (4)
(4)
���У� ��Dt�ֱ�Ϊ��t-1�κ�t�ε���ʱ��Ⱥ�ķ��
��Dt�ֱ�Ϊ��t-1�κ�t�ε���ʱ��Ⱥ�ķ��
(2) ��T��mʱ��
 (5)
(5)
ͨ�����ϵļ���ؼ������ĸĽ���������Ķ�����ģʽ��Ⱥ�㷨�IJ�������������¡�
����1����ʼ����Ϣ�أ��������Ϲ�ģm����Ϣ��Ũ�ȦӺ�����ʽ��Ϣ���Լ���Ϣ��Ũ�Ⱥ�����ʽ��Ϣ��Ȩ�� �ͦ¡��ӷ�ϵ���ѡ����ѭ������T��ģʽ�����Ȳ�����Ϣ��
�ͦ¡��ӷ�ϵ���ѡ����ѭ������T��ģʽ�����Ȳ�����Ϣ��
����2���㷨��ʼ����ѭ��������t �� t+1��
����3��ÿֻ���ϸ���ʽ(1)�������ڿ��ȣ������õ�kֻ���ϵĽ��ɱ�TA(k)��
����4����kֻ����ѡ����һ��㣬ѡ�����Ϊ
����5���������н�һ��������Ϣ�صľֲ����£� ��
�� ��
�� Ϊ��ʼ��Ϣ��Ũ�ȡ�
Ϊ��ʼ��Ϣ��Ũ�ȡ�
����6�����������һ�����κ�ȫ�����Ž������Ϣ�ظ��£� �����У�
������

���У�LkΪ��kֻ���ϵõ���·�����ȣ�QΪ������
����7����ȡ����Ӧ�ӷ�ϵ����
���� ��
�� Ϊ��Ϣ�ػӷ�ϵ���½硣
Ϊ��Ϣ�ػӷ�ϵ���½硣
����8������������Ⱥ�Ľ������������ʽ(4)��(5)������Ⱥ��ģ��
����9������ģʽ������1.2��������ķ���Ѱ�Ҹ߽�����ģʽ��
����10���ж��Ƿ��������������������������������Ž⣬����ת����2��
��������Ķ�����ģʽ��Ⱥ�㷨�������Ⱥ�㷨���������ڲ���3������8�Ͳ���9��ͨ�������ȴ������ã�ʹ��ÿһ������ӵ���Լ����ڿ��ȣ��Ӷ�������Ѱ�Ź��̵Ķ����ԣ������������ֲ���ֵ������Ӧ�ص�����Ⱥ��ģ���Ӷ��ܹ����ݽ������Σ��ӿ��㷨�����ٶȣ�����Ѱ������ģʽ�����Ը���Ч���������⸽������Ѱ�ţ����Ѱ��Ч�ʺͽ����ٶȡ�
2 �㷨�������Է�����������֤
���¶Զ�����ģʽ��Ⱥ�㷨�������Խ��з�������������[5]��[13]�����Ե�֪ Ϊһ��Markov���̡����У�
Ϊһ��Markov���̡����У� ��
�� Ϊ��ǰ���Ž⣻
Ϊ��ǰ���Ž⣻ Ϊ��t�ε�������Ѱ�ҵ������Ž⣻T(t)Ϊ��t�ε�������Ϣ��Ũ�ȡ�
Ϊ��t�ε�������Ѱ�ҵ������Ž⣻T(t)Ϊ��t�ε�������Ϣ��Ũ�ȡ�
����1[5]����������̬Markov���� ������״̬�ռ�
������״̬�ռ� ����
���� ����ʾ��tʱ�̵�������״̬�ĸ��ʣ���
����ʾ��tʱ�̵�������״̬�ĸ��ʣ��� �����������������ɢ�ռ䣬
�����������������ɢ�ռ䣬
 (6)
(6)
2.1 �����ٶȵĹ��Ʒ���
����1������������ģʽ��Ⱥ�㷨��Ӧ������̬Markov���� ������״̬�ռ���������
������״̬�ռ���������


���У� Ϊ����������ʱ�䡣��
Ϊ����������ʱ�䡣��

���� ��
��
֤������ ����
����




ͬ���ɵã�

������[5]��֪�� ������Ϊ
������Ϊ ����
����
ͬ���ɵã�
 ��
��
֤�ϡ�
����1������������ģʽ���㷨��Ӧ������̬Markov����������״̬�ռ��������㣺

��
���У� ������a��b��Ϊ������Ϊ����������ʱ�䡣
������a��b��Ϊ������Ϊ����������ʱ�䡣
֤�����ɶ���1��֪��
��Ϊ ���ȱ�����������
���ȱ�����������
 ��ͬ���ɵ�
��ͬ���ɵ� ����
����
 ��֤�ϡ�
��֤�ϡ�
����1ʵ���Ƕ���1��һ�ּ���ʽ������������������̬�����Ʒ�����ʶ��ٶȽ����˹��ƣ����´���һ���Ƕȸ���������ģʽ��Ⱥ�㷨�����ٶȹ��Ʒ�����
����1[13]���� ������������ʱ��
������������ʱ�� �����У�
�����У� ��ʾijֻ�����ڵ�t�ε�����ѡ��ĵ�i���ڵ�ǡ������·���ĸ��ʣ�
��ʾijֻ�����ڵ�t�ε�����ѡ��ĵ�i���ڵ�ǡ������·���ĸ��ʣ� ��ʾ����·����mΪ������Ŀ��nΪ�����ģ��
��ʾ����·����mΪ������Ŀ��nΪ�����ģ��
����2���� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
��
 ��
�� �ֱ��ǵ�·��i��j��������·��ʱ����Ϣ��Ũ�ȼ�����ʽ��Ϣ��
�ֱ��ǵ�·��i��j��������·��ʱ����Ϣ��Ũ�ȼ�����ʽ��Ϣ�� ��
�� �ֱ�Ϊ��Ϣ��Ũ�ȵ�������Сֵ��
�ֱ�Ϊ��Ϣ��Ũ�ȵ�������Сֵ�� ��
�� �ֱ�Ϊ����ʽ��Ϣ�������Сֵ������������ʱ��Ϊ
�ֱ�Ϊ����ʽ��Ϣ�������Сֵ������������ʱ��Ϊ
 (7)
(7)
֤������1��ѭ���У�ijֻ���Ϸ������Ž�ĸ���Ϊ
���У�nmaxΪ��i���ڵ�������·����Ŀ�����ֵ��ͬ�����Եó� ��nminΪ�ڵ�������·����Ŀ����Сֵ����������1�ó���������ʱ��Ϊ
��nminΪ�ڵ�������·����Ŀ����Сֵ����������1�ó���������ʱ��Ϊ
2.2 �����Է���
����2��������ģʽ��Ⱥ�㷨�״�ʱ�� ���㣺
���㣺

 (8)
(8)
֤�������㷨��i�ε����״ε������Ž����t-1֮ǰ��δ�������Ž⣬��

������


�ֱ����2���ֽ����Ƶ����£�

�Ӷ�����2��֤��֤�ϡ�
����3������������ģʽ���㷨��Ӧ������̬Markov���̼�����״̬�ռ�����

�� �������㷨�Ը���1������
�������㷨�Ը���1������
֤����������ɵõ���
��ΪΪ����̬Markov���̣��Ӷ��õ���

�ʿ��Եõ���


���㷨������֤�ϡ�
����3˵������ת�Ƹ�������Լ������ʱ���㷨�����Ը���1������h(t)��ʾ��t-1ʱ��δ����ȫ�����Ž�ʱtʱ����δ����ȫ�����Ž�ĸ��ʣ���
 ��
�� ��ʾ�㷨��t-1ʱ��δ����ȫ�����Ž�ʱtʱ�̵���ȫ�����Ž�ĸ��ʣ���
��ʾ�㷨��t-1ʱ��δ����ȫ�����Ž�ʱtʱ�̵���ȫ�����Ž�ĸ��ʣ��� ��0��g(t)��1��0��h(t)��1������һ������̬Markov������˵��
��0��g(t)��1��0��h(t)��1������һ������̬Markov������˵�� �������㷨�����ﵽȫ�����Ž⡣ͬ����
�������㷨�����ﵽȫ�����Ž⡣ͬ���� ����ˣ�g(t)Խ��Խ����ʹ
����ˣ�g(t)Խ��Խ����ʹ ���������Ž⣻ͬ����h(t)ԽС����ʹ�ý����㷨�����ڷ����Ž�ĸ���Խ�ͣ���Ѱ�ҵ����Ž�ĸ���Խ��
���������Ž⣻ͬ����h(t)ԽС����ʹ�ý����㷨�����ڷ����Ž�ĸ���Խ�ͣ���Ѱ�ҵ����Ž�ĸ���Խ��
2.3 TSP������֤����
Ϊ����֤�㷨��ѡ�õ��͵�TSP������з���������ֱ����Gr24��Oliver30��Att48��Eil51��Berlin52��St70���з���������趨 ��
�� ��
�� ��
�� ��
�� ����Ⱥ��ģ�ͳ�����Ŀ��ͬ��ģʽ����Ϊ3����ʼʱ�趨ÿ�����ϵĴ��ڿ���Ϊ4���㷨��������10�Σ�ͳ�ƽ�����1��ʾ��
����Ⱥ��ģ�ͳ�����Ŀ��ͬ��ģʽ����Ϊ3����ʼʱ�趨ÿ�����ϵĴ��ڿ���Ϊ4���㷨��������10�Σ�ͳ�ƽ�����1��ʾ��
��1 TSP����������Ա�
Table 1 Comparison of simulation results for TSP problems
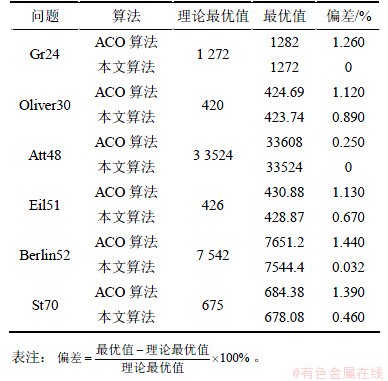
�ӱ�1���Կ����������㷨�ڽ���������ȶ��Զ�����ACO�㷨�����ñ����㷨��Gr24��Att48��2�����ⶼ��Ѱ�ҵ���ǰ�������Ž⣬���������������ϵ�ƫ��Ҳ��������1%���ڣ���ʾ�������㷨����Խ�ԡ�
Ϊ�˽�һ�����жԱȷ�������Oliver30��Eil51Ϊ�����з����Ƚϣ�������2������Ѱ�ҵ�������·���Լ���������������ֱ���ͼ2��ͼ3��ʾ��
ͼ2��ʾΪOliver30�����ϱ����㷨�������Ⱥ�㷨�ĶԱȽ���������㷨����Ч�����ڻ�������Ⱥ�㷨����Ҫ����Ϊ�����㷨ʹ��ÿ������ӵ���Լ��Ĵ��ڿ��ȣ�������Ѱ�ŵĶ����ԣ�ͬʱѰ�ҽ��������еĸ߽�����ģʽ������˽�����Ч�ʡ�
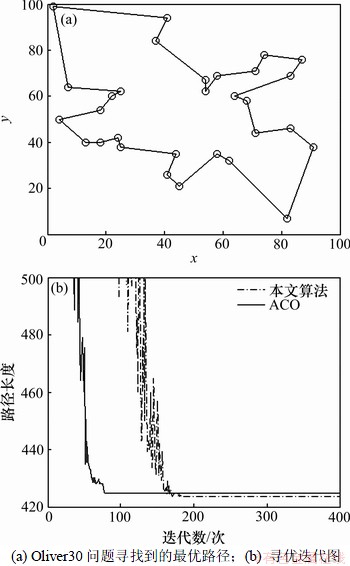
ͼ2 Oliver30�������ԱȽ��
Fig.2 Experimental results for Oliver30
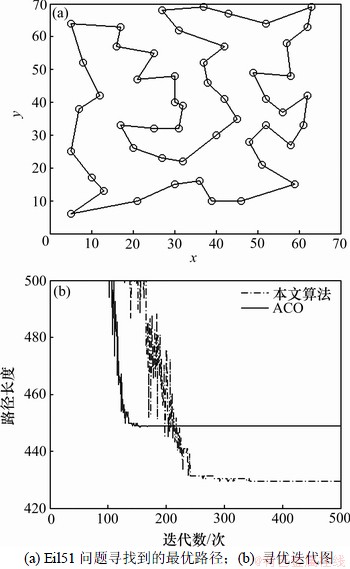
ͼ3 Eil51�������ԱȽ��
Fig.3 Experimental results for Eil51
ͼ3(a)��ʾΪ�����㷨��EIl51�����ϵõ������Ž����ͼ3(b)��ʾΪ�����㷨��ACOѰ�ŵ����ȽϽ�����ӶԱȽ�����Կ����������㷨����Ч���Ϻã�Ѱ�Ž���������ڻ�����Ⱥ�㷨��
Ϊ�˳�ֽ��бȽ�����֤�����㷨����ȷ�ԣ��������㷨����������㷨���з���Աȷ�������Oliver30��Eil51��2������Ϊ�����жԱȷ������������2�ͱ�3��
��2 Oliver30����Աȱ�
Table 2 Comparison results for Oliver30
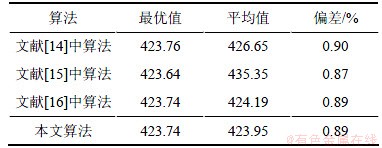
��3 Eil51����Աȱ�
Table 3 Comparison results for Eil51

�ӱ�2�ͱ�3���Կ�������Oliver30�����ϣ�����[14]�еķ�����Ѱ�ҵ�������ֵ�����ڱ�������ķ�������ֵ�����㷨�ȶ������ڱ����㷨����Eil51�����ϣ������㷨��ȼ�������������������Խ�ԣ��ܵõ����ŵ�·����
3 ������ģʽ��Ⱥ�㷨��·���滮�е�Ӧ��
3.1 �µ����ۺ���
���ȸ���һ���µ�UAV·���滮�����ۺ����������������ۺ�������в����CT�ͺ�������CL��ɣ���в����CTΪ
 (9)
(9)
����
 (10)
(10)
hkΪ��k����в����в�ȼ��� Ϊ��k����в��������÷�Χ��
Ϊ��k����в��������÷�Χ�� Ϊ��k����в�ĸ�Σ���÷�Χ��NTΪ��в��Ŀ��
Ϊ��k����в�ĸ�Σ���÷�Χ��NTΪ��в��Ŀ��
��i��UAV��ij2������Ƭ�μ�ĺ�������Ϊ (���У�
(���У� Ϊ�ö�·���ij���)����UAV��2�������ε����ۺ������Ա�ʾΪ
Ϊ�ö�·���ij���)����UAV��2�������ε����ۺ������Ա�ʾΪ
 (11)
(11)
���У�k1��k2�ֱ�Ϊ����Ҫ�̶�Ӱ�����ӣ������������������ۺ����е���Ҫ�ԡ����ԣ���i��UAV�����ۺ���Ϊ
 (12)
(12)
���У�ni��ʾ��i��UAV��·��Ƭ����Ŀ��
�ٶ�����N��UAV����Эͬ�����滮�����Эͬ���ۺϴ��ۺ���Ϊ
 (13)
(13)
3.2 ·���滮�������
��UAV��ս�������ȷ���������������趨��
(1) UAV��ʼλ��Ϊ(0, 0) km���յ�λ��Ϊ(60, 60) km��
(2) ����6����в�壬��вԴ��Բ�ķֱ�Ϊ(43, 20)��(30, 10)��(10, 30)��(25, 48)��(20, 18)��(40, 30)����в�뾶�ֱ�Ϊ2��2��3��4��4��3����Σ���÷�Χ����Ϊ1����в�ȼ��趨Ϊ����в�뾶��ͬ��
3.2.1 ����·���滮�������
���ö�����ģʽ��Ⱥ�㷨���е���·���滮����������ͼ4(a)��ʾ��Ϊ����֤�㷨��³���ԣ�����в�ȼ����иı䣬����֤�㷨����ȷ�ԡ�����в��3��6����в�ȼ�����20ʱ���滮����ֱ���ͼ4(b)��4(c)��ʾ���ɼ�UAV������Ч�ع����в���滮�������·����
�������ھ�̬���������ö�����ģʽ��Ⱥ�㷨�ķ��������ڶ�̬�����£�������ͻ����вʱ��ͻ����в�ij�ʼλ��Ϊ(0, 40)�����з�����X�ᣬ��в�ȼ�Ϊ4����ͻ����̬��в���·���滮�����ͼ5(a)��ʾ��
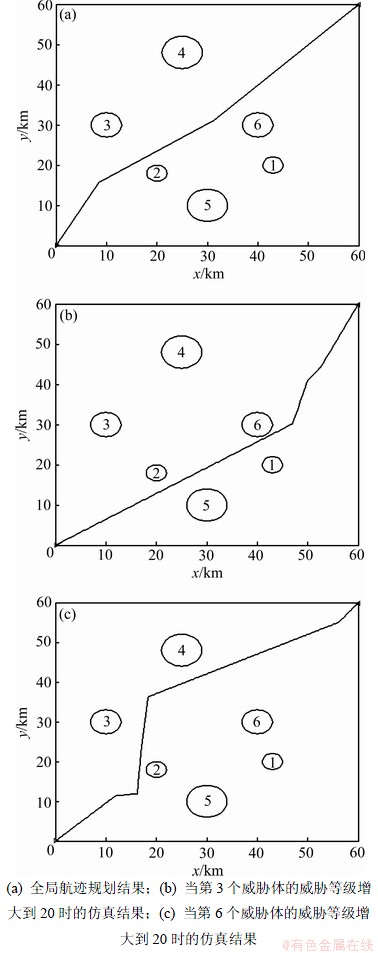
ͼ4 ��̬�����µķ�����
Fig.4 Path planning results in static environment
��ͼ5(a)���Կ����������㷨������Ч�ع���ƶ���в�����ñ���������㷨�����ACO�Լ�Duan��[18]�����ACO-DE���ۺ����ıȽϽ����ͼ5(b)��ʾ����ͼ5(b)���Կ��������ñ����㷨��ACO-DE���ó������۽�������ڻ���ACO����ʾ��2�ָĽ��㷨�����нϺõ���Խ�ԣ������㷨������Ч������ACO-DE����ʾ�������㷨�ڵ��������µ�����Ч������ACO-DE��
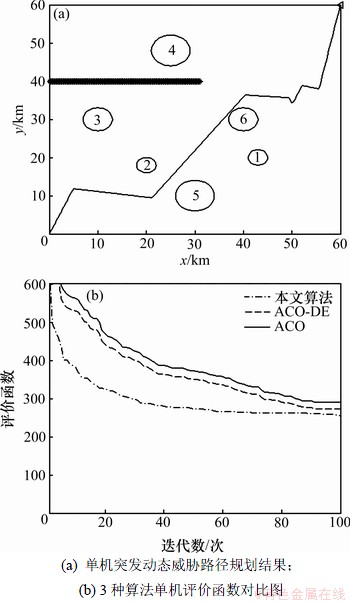
ͼ5 ͻ���ƶ���в��·���滮
Fig.5 Experimental results of path planning with pop-up threat
3.2.2 ���Эͬ�µ�·���滮����
�ڶ��Эͬ�£��ٶ�ͻ���ƶ���в��(60, 0)����в�ȼ�Ϊ2��3��UAVλ�÷ֱ�Ϊ(0, 20)��(0, 10)��(0, 5)�����Эͬ·���滮�����ͼ6(a)��ʾ���Ľ�ǰ���Ч�ܶԱ���ͼ6(b)��ʾ��
��ͼ6(a)���Կ��������ñ���������㷨�ڶ��Эͬ���β�����ͻ����̬��в���ܹ��滮����Ч��·������ͼ6(b)���Կ��������ñ����㷨�����ܵ����ۺ��������û���ACO�Լ�ACO-DE���滮���ĺ������ۺ����������½����Ӷ����������㷨�滮����·�����ڻ�����Ⱥ�㷨�������֤�˱����㷨����Ч�ԡ�
��ͼ6(b)�����Կ������ڿ�ʼ����ʱ��ACO-DE����Ч�����ڱ�������Ķ�����ģʽ��Ⱥ�㷨������Ҫ����Ϊ�ڸ��ӵĶ��Эͬ�����£������㷨�����˶����ȵĴ��ڣ�������Ѱ�Ź�����Ѱ��·���ĸ߽�ģʽ���Ӷ��������㷨�ĸ����ԣ������ʼ�ε���������������롣����Ѱ�ŵ��������У������㷨�����Ƶõ�������֣��������յõ�������Ч��Ҳ����ACO-DE��
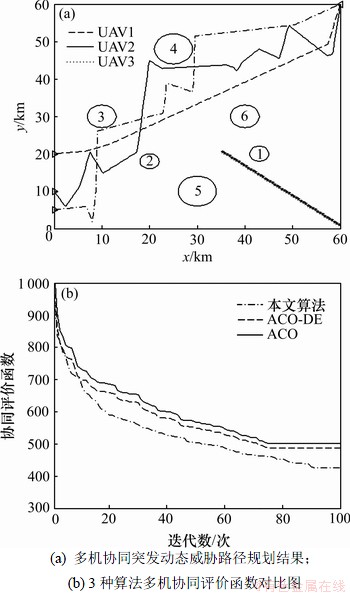
ͼ6 ͻ����в�¶��Эͬ·���滮
Fig.6 Experimental results of cooperative path planning with pop-up threat
4 ����
(1) ����Ѱ���������ͬ�����ϸ��費ͬ�Ĵ��ڿ��ȣ��������㷨��Ѱ�����ܣ�ʹ���������Ͽ��ԽϿ���ҵ����Ž⣬�ӿ����㷨���������ܡ�
(2) �����һ��Ѱ�Ҹ߽�ģʽ�ķ������Ӷ�������㷨���������ܣ������˵ͽ�ģʽ�����µ���������ƫ�
(3) ���㷨�������Խ��������۷�����������������ʱ��Ĺ��Ʒ������״�ʱ��ķֲ���ʽ����TSP��������˷������������������Աȷ�����֤�����㷨����Խ�ԡ�
(4) ��������㷨Ӧ����UAV��·���滮�У���������֤�����㷨��һ�ֽ���·���滮����Ч����������Ч�ع���ƶ���в��
�ο����ף�
[1] Dorigo M, Gambardella L M. Ant colony system: A cooperative learning approach to the traveling salesman problem[J]. IEEE Transactions on Evolutionary Computation, 1997, 1(1): 53-66.
[2] Stutzle T, Dorigo M. A short convergence proof for a class of ant colony optimization algorithms[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(4): 358-365.
[3] Guitar W J. A graph-based ant system and its convergence[J]. Future Generation Computing Systems, 2000, 16(9): 873-888.
[4] �ƺ�, ��־��, �ⴺ��, ��. ��Ⱥ�㷨�������ٶȷ���[J]. �����ѧ��, 2007, 30(8): 1345-1353.
HUANG Han, HAO Zhifeng, WU Chunguo, et al. The convergence speed of ant colony optimization[J]. Chinese Journal of Computers, 2007, 30(8): 1345-1353.
[5] YU Yang, ZHOU Zhi-hua. A new approach to estimating the expected first hitting time of evolutionary algorithms[J]. Artificial Intelligence, 2008, 172(15): 1809-1832.
[6] ����, ������, ����ǿ, ��. ���ڸĽ���Ⱥ�㷨�Ż�������LSSVM���ڸ���Ԥ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(2): 3408-3414.
LONG Wen, LIANG Ximing, LONG Zuqiang, et al. Parameters selection for LSSVM based on modified ant colony optimization in short-term load forecasting[J]. Journal of Central South University: Science and Technology, 2011, 42(2): 3408-3414.
[7] ����, ������, ����. ������ҵ���������Ӧ�Ǿ��ȴ�����Ⱥ�㷨[J]. �������������ϵͳ, 2009, 15(10): 1973-1978.
HUANG Ming, LIU Pengfei, LIANG Xu. Ant colony algorithm oriented to Job Shop scheduling problem based on self-adaptive and uneven windows[J]. Computer Integrated Manufacturing Systems, 2009, 15(10): 1973-1978.
[8] Wong K Y, See P C. A new minimum pheromone threshold strategy (MPTS) for max�Cmin ant system[J]. Applied Soft Computing, 2009, 9(8): 882-888.
[9] �˳, �츣÷, ������, ��. һ�ֻ�������ʽ�ݻ��㷨�����š��������ϵͳ[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2010, 41(2): 609-614.
LI Kangshun, XU Fumei, ZHANG Wensheng, et al. An improved best-worst ant system based on heuristic evolutionary algorithm[J]. Journal of Central South University: Science and Technology, 2010, 41(2): 609-614.
[10] ���ѳ�, Ϳ��ҫ, ������, ��. �����Ŵ���Ⱥ�㷨����֦����·ȡ�ͳ������Ż�[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(8): 2356-2362.
LEI Youcheng, TU Zuyao, GUI Weihua, et al. Optimization of genetic and ant colony algorithm[J]. Journal of Central South University: Science and Technology, 2011, 42(8): 2356-2362.
[11] ��С��, ������. ��������ģʽ���ӵķֲ������㷨���TSP����[J]. ģʽʶ�����˹�����, 2011, 24(2): 185-193.
HE Xiaojuan, ZENG Jianchao. Solving TSP problems with estimation of distribution algorithm based on superiority pattern junction[J]. PR & AI, 2011, 24(2): 185-193.
[12] Wu Z L, Zhao N, Ren G H, et al. Population declining ant colony optimization algorithm and its applications[J]. Expert Systems With Applications, 2009, 36(3): 6276�C6281.
[13] HUANG Han, WU Chun-guo. A pheromone-rate-based analysis on the convergence time of ACO algorithm[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2009, 39(4): 910-923.
[14] �ĺ��, ���IJ�, ��Ԩ. ����Ӧ���л��ƵĸĽ���Ⱥ�㷨[J]. ϵͳ��������Ӽ���, 2009, 31(12): 2973-2976.
XIA Hongbin, XU Wenbo, LIU Yuan. Ant colony algorithm with adaptive parallel mechanism[J]. Systems Engineering and Electronic, 2009, 31(12): 2973-2976.
[15] ��С��, ������, ������. һ�ֻ�����Ϣ���ݵķֲ������㷨[J]. ����ѧ��, 2011, 39(4): 968-970.
HE Xiaojuan, ZENG Jianchao, WANG Lifang. An estimation of distribution algorithm based on information transmission[J]. Acta Electronica Sinica, 2011, 39(4): 968-970.
[16] ֣��, ��ϲ�, �����. ��̬����ѡ����ԵĸĽ���Ⱥ�㷨[J]. ���������, 2008, 23(2): 225-228.
ZHENG Song, HOU Dibo, ZHOU Zekui. Ant colony algorithm with dynamic transition probability[J]. Control and Decision, 2008, 23(2): 225-228.
[17] �Ļ�, ����, ����. һ�ֻ�����Ⱥ˼�����Ⱥ��������Ӧ�Ż��㷨[J]. ɽ����ѧѧ��: ��ѧ��, 2010, 40(3): 26-30.
XIA Hui, WANG Hua, CHEN Xi. A kind of ant colony parameter adaptive optimization algorithm based on particle swarm optimization thought[J]. Journal of Shandong, University: Engineering Science, 2010, 40(3): 26-30.
[18] DUAN Haibin, YU Yaxiang, ZHANG Xiangyin, et al. Three- dimension path planning for UCAV using hybrid meta-heuristic ACO-DE algorithm[J]. Simulation Modelling Practice and Theory, 2010, 18(3): 1104-1115.
(�༭ ���˱�)
�ո����ڣ�2012-08-19�������ڣ�2012-10-11
������Ŀ��������Ȼ��ѧ����������Ŀ(61174031)
ͨ�����ߣ�����(1983-)���У�ɽ�������ˣ���ʿ�о������������ܿ������ۼ�Ӧ�õ��о����绰��13723988582��E-mail: hylz1008@126.com
ժҪ�������Ⱥ�㷨�����ٶ����Լ�������ֲ���ֵ���ص㣬���һ�ֶ�����ģʽ��Ⱥ�㷨����ÿ���������ò�ͬ�Ĵ��ڿ��ȣ�������������������ԺͶ����ԣ�����һ��Ѱ����Ⱥ�߽�ģʽ�ķ���������㷨����Ч�ʡ������Ⱥ��ģ������Ӧ�仯�������������㷨�ڲ�ͬԼ�������½��������Է����������㷨����ʱ��Ĺ��Ʒ������״�ʱ��ֲ��ı�����ʽ����������㷨���ü������͵�TSP�����������Ⱥ�㷨�ͼ��ָĽ���Ⱥ�㷨���жԱȷ�����������Ķ�����ģʽ��Ⱥ�㷨Ӧ�������˻�(UAV)·���滮�С��о������������������㷨�����ڻ�����Ⱥ�㷨�����Ҵ���������������ָĽ���Ⱥ�㷨���š���������㷨�����·���滮��Ч�ʣ���������Ч�ع�ܶ�̬��в��
[4] �ƺ�, ��־��, �ⴺ��, ��. ��Ⱥ�㷨�������ٶȷ���[J]. �����ѧ��, 2007, 30(8): 1345-1353.
[7] ����, ������, ����. ������ҵ���������Ӧ�Ǿ��ȴ�����Ⱥ�㷨[J]. �������������ϵͳ, 2009, 15(10): 1973-1978.
[11] ��С��, ������. ��������ģʽ���ӵķֲ������㷨���TSP����[J]. ģʽʶ�����˹�����, 2011, 24(2): 185-193.
[14] �ĺ��, ���IJ�, ��Ԩ. ����Ӧ���л��ƵĸĽ���Ⱥ�㷨[J]. ϵͳ��������Ӽ���, 2009, 31(12): 2973-2976.
[15] ��С��, ������, ������. һ�ֻ�����Ϣ���ݵķֲ������㷨[J]. ����ѧ��, 2011, 39(4): 968-970.
[16] ֣��, ��ϲ�, �����. ��̬����ѡ����ԵĸĽ���Ⱥ�㷨[J]. ���������, 2008, 23(2): 225-228.
[17] �Ļ�, ����, ����. һ�ֻ�����Ⱥ˼�����Ⱥ��������Ӧ�Ż��㷨[J]. ɽ����ѧѧ��: ��ѧ��, 2010, 40(3): 26-30.
