
J. Cent. South Univ. (2016) 23: 1709-1718
DOI: 10.1007/s11771-016-3225-7

A novel weighed cooperative bandwidth spectrum sensing for spectrum occupancy of cognitive radio network
LIU Xin(����)1, 2, CHEN Kun-qi(������)2, YAN Jun-hua(�ƾ���)2
1. School of Information and Communication Engineering, Dalian University of Technology, Dalian 116024, China;
2. College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
 Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Abstract:
In cognitive radio network (CRN), a secondary user (SU) may utilize the spectrum resource of the primary user (PU) and avoid causing harmful interference to the primary network (PN) via spectrum sensing. In the traditional time spectrum sensing, the SU cannot detect the PU��s presence during its transmission, thus increasing interference to the PN. In this work, a novel weighed cooperative bandwidth spectrum sensing method is proposed, which allows multiple SUs to use part of the bandwidth to perform cooperative spectrum sensing throughout the whole frame in order to detect the PU��s reappearance in time. The SU��s spectrum efficiency is maximized by jointly optimizing sensing bandwidth proportion, number of cooperative SUs and detection probability, subject to the constraints on the SU��s interference and the false alarm probability. Simulation results show significant decrease on the interference and improvement on the spectrum efficiency using the proposed weighed cooperative bandwidth spectrum sensing method.
Key words:
cognitive radio; spectrum sensing; spectrum efficiency; interference��
1 Introduction
Cognitive radio network (CRN) is an intelligent wireless communication network based on cognitive technology. It can improve current spectrum utilization greatly through allowing the secondary user (SU) to use the frequency bands licensed to the primary user (PU) by the government, providing that the communication quality of the primary network (PN) must be firstly guaranteed [1]. That is, the CRN can only use the channel in which the PU is absent at a specific time. To avoid causing severe interference to the PN, the SU has to identify the idle spectrum unused by the PU through performing spectrum sensing before any transmissions [2], but if the presence of the PU is detected, the SU has to vacate this spectrum.
Since SU cannot obtain any information about PU, energy detection has been widely used as a single-user spectrum sensing method, which can be implemented easily without needing any prior information of the PU��s signal [3]. However, if the PU is shadowed (or in severe fading), the energy detection performance could decrease because of receiving lower energy from the PU. Thus, cooperative spectrum sensing is proposed to cope with energy attenuation through the collaborative detection of multiple SUs locating in different areas [4-5].
Currently, the time spectrum sensing is often adopted in CRN, i.e., the SU senses the PU at the beginning of a frame and then transmits data in the left time if the absence of the PU is detected [6]. In Ref. [7], the authors propose a sensing-before-transmit media access control protocol, where a SU may access vacant licensed frequency bands without causing any harmful interference to the PU through performing spectrum sensing before transmission. In Ref. [8], a wideband spectrum sensing model is proposed, where the SU may scan multiple channels to acquire an idle channel before transmission. In Ref. [9], the authors propose a cooperative spectrum sensing subject to the constraint of the PN outage, where the SU senses the PU��s signal in the observation phase and then sends its observation information to a fusion center in the reporting phase, and the final decision on the occupancy of the PU channel is made at the fusion center. In Ref. [10], a listen-before- transmit spectrum-opportunity detection method is proposed for spectrum overlay of SU, which has been shown that the geographic distribution and the traffic pattern of the PU have a significant impact on the detection performance besides noise and fading. In Refs. [11-12], a sensing-throughput tradeoff scheme is proposed to improve the CRN��s throughput through reasonably allocating sensing and transmission time. In Ref. [13], a joint optimization of cooperative sensing time and SU selection is proposed to maximize the CRN��s spectrum efficiency subject to the constraints of the SU��s false alarm and detection probabilities, cooperative overhead and sensing period. In time spectrum sensing from Refs. [7-13], if the PU reappears in the channel during CRN��s transmission, the SU cannot detect the PU��s presence and thus may cause severe interference to the PN. In this work, a weighed cooperative bandwidth spectrum sensing is proposed to improve the sensing performance and decrease the interference to the PN throughout the whole transmission frame of the CRN. Through jointly optimizing sensing bandwidth, number of cooperative SUs and detection probability, the CRN��s spectrum efficiency can be maximized.
2 Cooperative spectrum sensing and PU state model
2.1 Weighed cooperative spectrum sensing
Cooperative spectrum sensing is proposed to improve the SU��s detection performance when the PU isshadowed or in severe multipath fading. As shown in Fig. 1, a PN including D PUs and one base station is considered, and a CRN consisting of N SUs that act as the sensing relays to cooperatively detect the PU��s state (presence/absence) and one fusion center that acts as a base station to manage these SUs and process sensing information. The SU1��s detection performance is inaccurate because of the shadowed PU, but with the aids of SU2-SUN, SU1 can make an accurate decision through sharing the sensing information from other SUs. In cooperative spectrum sensing, each SU detects the PU��s transmission signal by energy detection independently and then reports its local detection result to the fusion center [14]. The fusion center will make a final decision on the PU��s state through combining all the received detection results and then broadcast its decision to all the SUs.
Energy detection is often used in the local single- user detection of cooperative spectrum sensing because of its reliable spectrum detection performance, as shown in Fig. 2. The SUi��s received signal yi for i=1, 2, ��, N is given as a binary hypothesis as follows:
 (1)
(1)
where s(m) is the PU��s signal with power  n(m) is the Gaussian noise with power
n(m) is the Gaussian noise with power  hi is the channel gain between the PU and SUi; hypotheses ��0 and ��1 denote the absence and presence of the PU, respectively; and M is the number of the received signal samples.
hi is the channel gain between the PU and SUi; hypotheses ��0 and ��1 denote the absence and presence of the PU, respectively; and M is the number of the received signal samples.
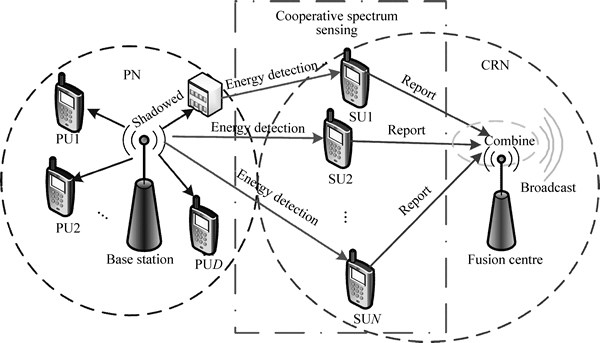
Fig. 1 Cooperative spectrum sensing model

Fig. 2 Energy detection principle
If the sensing bandwidth of the PU��s signal is w, according to the Nyquist Theorem, the sampling frequency fs��2w. Thus the minimal sampling number is calculated as follows:
 (2)
(2)
where t is the detection time. The energy statistic of the received signal is given as follows:
 (3)
(3)
According to the Centre Limit Theory, zi approximately obeys a Gaussian distribution with large M, whose means and variances at ��0 and ��1 are given as follows:
 (4)
(4)
where  zi is reported to the fusion center by SUi as the local detection result, and the aggregate energy statistic Z is obtained by summing zi with the corresponding weight ��i for i=1, 2, ��, N, as follows:
zi is reported to the fusion center by SUi as the local detection result, and the aggregate energy statistic Z is obtained by summing zi with the corresponding weight ��i for i=1, 2, ��, N, as follows:
 (5)
(5)
where Z also obeys a Gaussian distribution, which is the weighed sum of a series of Gaussian-distributed functions. From Eq. (4), the means and variances of Z ��0 and ��1 are given as follows:
 (6)
(6)
In the fusion center, comparing Z to a specific threshold ��, ��0 is decided with Z<�� while ��1 is determined with Z�ݦ�. Noting  the false alarm probability Pf and the detection probability Pd of the weighed cooperative spectrum sensing are given as follows:
the false alarm probability Pf and the detection probability Pd of the weighed cooperative spectrum sensing are given as follows:
 (7)
(7)
where  and the function var(x) denotes the variance of x. From Eq. (7), with a given Pd, Pf is related to Pd as follows:
and the function var(x) denotes the variance of x. From Eq. (7), with a given Pd, Pf is related to Pd as follows:
 (8)
(8)
Suppose hmin=min(h1, h2, ��, hN). Noting  and according to the Cauchy Theory, it is obtained that
and according to the Cauchy Theory, it is obtained that
 (9)
(9)
Since Q(x) is a monotonously decreasing function, substituting Eq. (9) into Eq. (8), an upper bound of Pf is given as follows:
 (10)
(10)
We minimize the upper bound of Pf instead of minimizing Pf through optimizing ��i for i=1, 2, ��, N. Minimizing Pf is equal to maximizing  as follows:
as follows:
 (11)
(11)
where the equation is obtained when 
Since the SU with better channel gain will achieve more accurate sensing information, the weighed cooperative spectrum sensing can improve the global sensing performance through increasing the combined proportion of the accurate sensing information at the fusion center, thus decreasing the false alarm probability. Substituting Eq. (11) into Eq. (10), the minimal Pf is given as follows:
 (12)
(12)
2.2 PU occupancy model
The PU occupancy model can be built as an ON-OFF Markov random process, where ON denotes the PU��s presence ��1 and OFF indicates the PU��s absence ��0 [15-18]. Such a model captures the OFF time in which the channel can be utilized by the SU without causing any harmful interference to the PU. Once an OFF time is discovered, the SU can utilize any portion of the remaining OFF time for its own transmission. We assume that the persistent time of ��0,  follows the probability density function
follows the probability density function  and the persistent time of ��1,
and the persistent time of ��1,  follows the probability density function
follows the probability density function  As shown in Fig. 3, supposing that u0 and u1 denote the transfer rates from ��0 to ��1 and ��1 to ��0, respectively,
As shown in Fig. 3, supposing that u0 and u1 denote the transfer rates from ��0 to ��1 and ��1 to ��0, respectively, and
and obey the exponential distributions as follows:
obey the exponential distributions as follows:
 (13)
(13)
where we get the means  and
and  Thus, the absent and present probabilities of the PU are given as follows:
Thus, the absent and present probabilities of the PU are given as follows:
 (14)
(14)
During the frame time T, the persistent time of ��0 is
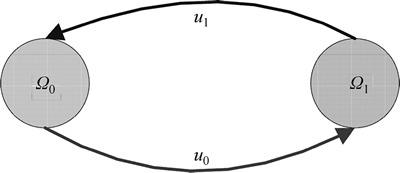
Fig. 3 PU occupancy model given as follows:
 (15)
(15)
while the persistent time of ��1 is given by
 (16)
(16)
3 Cooperative bandwidth spectrum sensing
3.1 Spectrum sensing model
It is supposed that multiple SUs transmit data through time division multiple access (TDMA), and there is only one SU to communicate in one frame. In the traditional cooperative time spectrum sensing from Refs. [11-13], before transmission, cooperative spectrum sensing is firstly performed by multiple SUs at the beginning of a frame, wherein each SU��s local sensing result is reported to the fusion center in a single time slot in order to avoid transmission conflict, as shown in Fig. 4. If the PU��s absence is decided by the fusion center, the SU can transmit data in the PU��s channel, however, if the PU��s presence is determined, the SU has to shift to another idle channel [19].
Hence, cooperative time spectrum sensing denotes that the SUs perform cooperative spectrum sensing and data transmission in different time slots. The SU forwards data in the transmission slot only if the absence of the PU is detected in the sensing slot. The disadvantage of cooperative time spectrum sensing is that the SU cannot sense the PU during the transmission slot, thus causing severer interference to the PU if the PU reappears suddenly.
The proposed cooperative bandwidth spectrum sensing is shown in Fig. 5, wherein one of the N SUs uses the channel allocated to the PU, providing that the PU is absent in the spectrum. N-1 sensing SUs (eliminating the communicating SU) use part of the channel bandwidth to perform cooperative spectrum sensing and the communicating SU uses the remaining channel bandwidth to transmit data. To avoid transmission conflict, each sensing SU reports its sensing result to the fusion center in a single subband after local sensing, and the fusion center broadcasts the final decision to N SUs using another subband. The sensing SUs need immediately report their sensing information to the fusion center as relays instead of making a local decision, and the fusion center charges to process the received sensing information for obtaining a detection result. Often the fusion center acts as a base station with high-speed operations and thus may get the spectrum sensing result in real time. Once the sensing SUs have received the PU��s signal, they may relay the sensing information to the fusion center at any time of one frame, which is very different from the traditional time spectrum sensing. That is, the SUs may only report their sensing information at the beginning of one frame in time spectrum sensing, however, to obtain a real-time detection result, the SUs can report their sensing information at any time in the proposed bandwidth spectrum sensing.
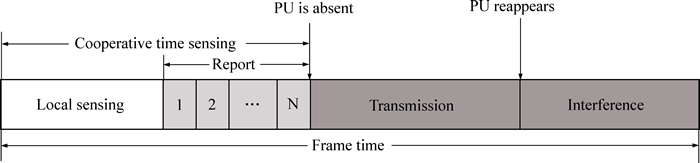
Fig. 4 Cooperative time spectrum sensing model
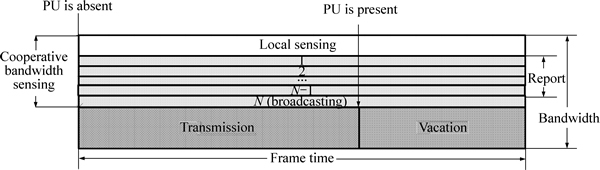
Fig. 5 Cooperative bandwidth spectrum sensing model
Hence, cooperative bandwidth spectrum sensing denotes that the SUs perform cooperative spectrum sensing and data transmission in different frequency subbands synchronously. The advantage of cooperative bandwidth spectrum sensing is that the SU may detect the PU��s state momentarily throughout the whole frame. Hence, once the PU��s presence is found, to avoid causing any interference to the PU, the SU can cease the transmission and vacate the PU��s channel immediately.
As shown in Fig. 5, it is supposed that the local sensing bandwidth is ��W, where W is the PU channel bandwidth and 0�ܦ���1 is the sensing bandwidth proportion, and both the reporting bandwidth and broadcasting bandwidth are ��W. Thus the transmission bandwidth of the communicating SU is given as follows
 (17)
(17)
where ��=��W/W. Supposing that the SUN is the communicating SU, the received signal at the fusion center can be given as follows
 (18)
(18)
where X(t) is the data signal of the communicating SU, and gi is the channel gain between SUi and fusion center.
At the beginning of the bandwidth spectrum sensing, an initial cooperative spectrum sensing is performed to determine the absence or presence of the PU by the fusion center. If one channel is detected to be idle, the SU is allowed to access this channel to transmit data during a frame. To determine the action of the PU at the current time, the communicating SU��s receiver decodes the data signal X(t) from the transmitter, and the fusion center strips X(t) away from R(t) to obtain the remaining sensing signals zi(t) for i=1, ��, N-1, which are then combined to get a final decision in real time, as shown in Fig. 6.
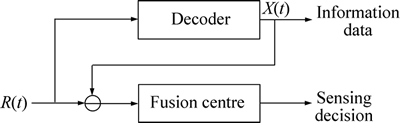
Fig. 6 SU receiver structure
In cooperative time spectrum sensing, the interference to the PU includes the interference due to the SU��s miss detection and the interference generated by the reappearance of the PU during the SU��s transmission. Supposing that the sensing time is much less than the frame time, the SU��s interference probability is given as follows:
 (19)
(19)
In cooperative bandwidth spectrum sensing, the SU can detect the PU��s state in real time, thus causing the interference to the PU only by the SU��s miss detection. Hence, the SU��s interference probability is given by
 (20)
(20)
3.2 CRN��s spectrum efficiency
The SU��s transmission includes two cases: 1) SU transmits data with rate r0 if the PU��s absence is detected accurately; 2) SU transmits data with rate r1 if the PU��s presence is not detected [20-21]. r0 and r1 are given as follows
 (21)
(21)
where p is the SU��s transmission power. Thus the CRN��s spectrum efficiency is given as follows:
 (22)
(22)
To improve the spectrum efficiency, we set  Substituting Eqs. (12) and (17) into Eq. (22) and letting t=T and w=��W, C is a function of ��, N and Pd as follows:
Substituting Eqs. (12) and (17) into Eq. (22) and letting t=T and w=��W, C is a function of ��, N and Pd as follows:

 (23)
(23)
where the false alarm probability Pf is denoted with Pd as follows:
 (24)
(24)
Obviously, Pf increases as �� decreases, thus reducing the sensing performance, while the transmission bandwidth increases with ��, yielding to improve the communication rate. Hence, there is a tradeoff between sensing performance and transmission bandwidth. Thus, to obtain this tradeoff, we seek to maximize the CRN��s throughput through optimizing �� as follows.
4 Joint optimization algorithm
Our goal is to maximize the CRN��s spectrum efficiency by jointly optimizing sensing bandwidth proportion, number of cooperative SUs and detection probability, subject to the constraints of the SU��s interference probability and false alarm probability. The optimization problem is described as follows
 (25)
(25)
where �� and �� are the upper bounds of the interference and false alarm probabilities, respectively, is the total number of the SUs. To guarantee enough spectrum utilization, we often let �š�0.5. From Eq. (20), with PI�ܦ� we have Pd��v where
is the total number of the SUs. To guarantee enough spectrum utilization, we often let �š�0.5. From Eq. (20), with PI�ܦ� we have Pd��v where  We firstly present Proposition 1.
We firstly present Proposition 1.
Proposition 1: Only when Pd=v, C can obtain the maximal value.
Proof: See Appendix A.
Substituting Pd=v, Eqs. (23) and (24) into Eq. (25), the optimization problem of �� and N is obtained as follows:
 (26)
(26)
where 



 and
and To solve Eq. (26), Proposition 2 is presented in the following.
To solve Eq. (26), Proposition 2 is presented in the following.
Proposition 2: With a given N, Eq. (26) is a convex optimization problem of ��, i.e., there is 
 to maximize
to maximize 
Proof: See Appendix B.
��0(N) can be obtained using the binary searching method described in Algorithm 1, where  is the first-order partial derivative of C(��, N) in ��, and the symbol function sign(x)=1 with x��0 while sign(x)=-1 with x<0.
is the first-order partial derivative of C(��, N) in ��, and the symbol function sign(x)=1 with x��0 while sign(x)=-1 with x<0.
Algorithm 1: Binary searching method with given N
1) With given N, set ��min=0, ��max=��(N) and the estimation error ��=10-3;
2��Set ����(��min+��max)/2;
3) If  let ��min=��;
let ��min=��;
4) Otherwise, if
 let ��max=��;
let ��max=��;
5) Repeat steps 2) to 4) until 
6) Set 
With we get ���ݦ�(N) where
we get ���ݦ�(N) where
 (27)
(27)
Thus with given N, the optimal  to maximize Eq. (26) is obtained as follows:
to maximize Eq. (26) is obtained as follows:
 (28)
(28)
Especially, if �� is given as follows:
 (29)
(29)
we have ��*(N)=��0(N).
Since N is an integer, it is not computationally expensive to search through N from 1 to K, as shown in Algorithm 2. The SUs with higher channel gains from PU are preferentially chosen to perform cooperative spectrum sensing, which may yield better detection performance. As the time complexity of Algorithm 1 is O(lgn) where n=��(N)/��, the total time complexity of Algorithm 2 is given as follows
 (30)
(30)
From Eq. (23), the SU��s maximal spectrum efficiency is obtained as C(��*, N*, v).
Algorithm 2: Exhaustive searching of N
1) Array K SUs in descending order of their channel gains hi for i=1, 2, ��, K;
2��For N=1, 2, ��, K, calculate H(N) with the front N SUs�� channel gains;
3) With given N and H(N), calculate ��*(N) by Algorithm 1 and Eq. (28);
4) Search  and set ��*=��*(N*).
and set ��*=��*(N*).
5 Simulation and discussion
In simulations, we assume that the frame time T=5 s, the channel bandwidth W=1 MHz, the reporting bandwidth ��W=0.05 MHz, the sampling frequency fs= 2W=2 MHz, the transfer rates u0=u1=0.5, the channel gains from PU to SU and SU to fusion center obey the Rayleigh distributions with means -20 dB and -10 dB, respectively, the PU��s power  10 dB��mW, the noise power
10 dB��mW, the noise power the SU��s transmission power p=10 dB��mW, the total number of the SUs K=10, and the upper bound of false alarm probability ��=0.5.
the SU��s transmission power p=10 dB��mW, the total number of the SUs K=10, and the upper bound of false alarm probability ��=0.5.
Figure 7 indicates the detection probability Pd by the unweighed and weighed cooperative sensing methods, with various false alarm probabilities Pf. As can be seen from Fig. 7, Pd improves as Pf increases, because Pd and Pf have the same monotony in ��; Pd of weighed cooperative sensing is larger than that of unweighed cooperative sensing, which demonstrates the predominance of our proposed method. Figure 8 shows the interference probability PI by cooperative time and bandwidth sensing methods, with various Pf. It is observed that PI decreases as Pf increases, which denotes that the interference to the PU decreases as the SU��s spectrum utilization reduces. From Fig. 8, PI ofcooperative bandwidth sensing is lower than that of cooperative time sensing, because cooperative bandwidth sensing can detect the PU��s presence throughout the whole frame.
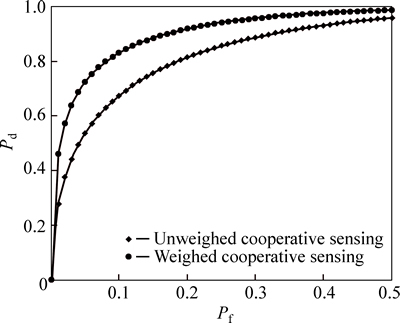
Fig. 7 Detection probability by unweighed and weighed cooperative sensing methods
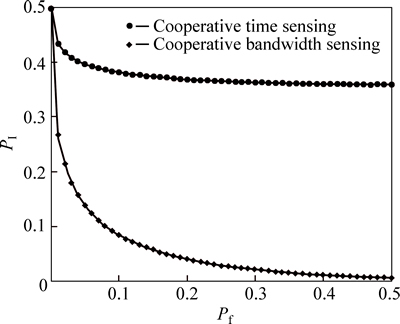
Fig. 8 Interference probability by cooperative time and bandwidth sensing methods
Figure 9 plots the SU��s spectrum efficiency C with various sensing bandwidth proportion �� and number of cooperative SUs N. It is seen that there exist optimal �� and N to maximize C, which obtains the maximal spectrum efficiency 2.34 bit/(s��Hz) at ��=0.24 and N=5. Figure 10 shows C versus N={1, 3, 5, 8, 10} with various ��. From Fig. 10, the spectrum efficiencies with N=1 and 10 are both lower, because the cooperative sensing performance reduces with small N, while the report bandwidth increases (i.e. transmission bandwidth decreases) with large N.
Figure 11 plots C versus ��={0.05, 0.1, 0.24, 0.3, 0.5} with various N. It is observed that, both the spectrum efficiencies with ��=0.05 and 0.5 are lower, as the local sensing performance decreases with small ��, while the local sensing bandwidth increases (i.e. transmission bandwidth decreases) with large ��. Figure 12 indicates the SU��s spectrum efficiency versus cooperative timespectrum sensing [11] and the proposed cooperative bandwidth spectrum sensing, with various received SNRs. As can be seen from Fig. 12, cooperative bandwidth sensing can achive higher spectrum efficiency, because cooperative bandwidth sensing may result in lower false alarm probability subject to the specific interference constraints. Spectrum efficiency improveswith increasing SNR, because better cooperative sensing performance may be achieved with larger received SNRs.
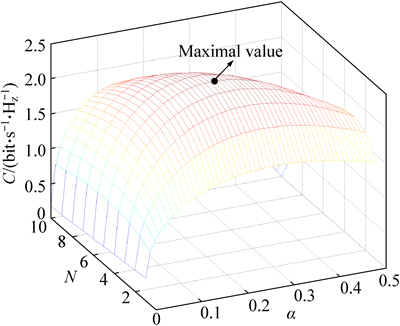
Fig. 9 Spectrum efficiency with various sensing bandwidth proportion and number of cooperative SUs
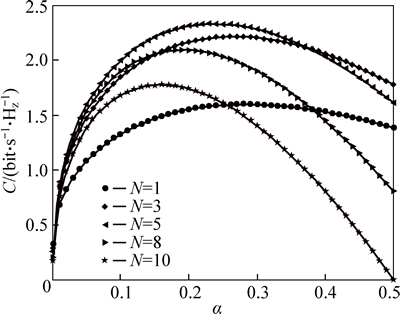
Fig. 10 Spectrum efficiency at different number of cooperative SUs
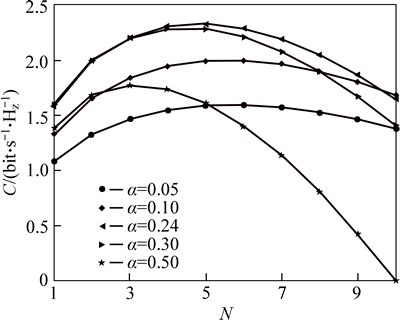
Fig. 11 Spectrum efficiency with different sensing bandwidth proportions
Another widely used cooperative spectrum sensing methods are OR-rule cooperative sensing and AND-rule cooperative sensing [22]. Figures 13 and 14 show false alarm probability and spectrum efficiency versus cooperative bandwidth sensing, OR-rule cooperative sensing and AND-rule cooperative sensing, respectively. It is seen that the proposed cooperative bandwidth sensing can decrease false alarm probability and improve throughput effectively, because through joint optimization algorithm, we have chosen optimal cooperative sensing parameters such as sensing bandwidth and number of cooperative SUs.
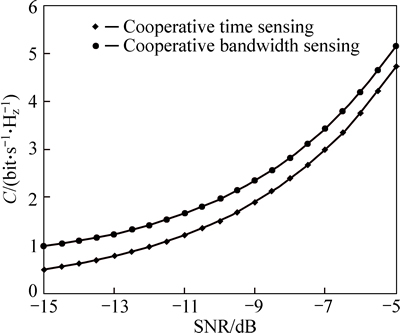
Fig. 12 Spectrum efficiency by cooperative time and bandwidth sensing methods
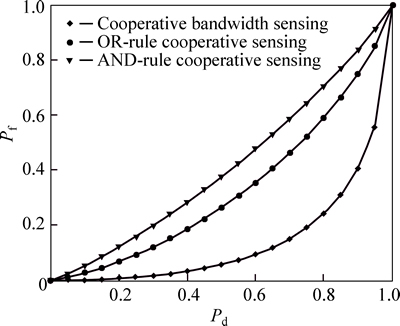
Fig. 13 False alarm probability by different cooperative sensing methods
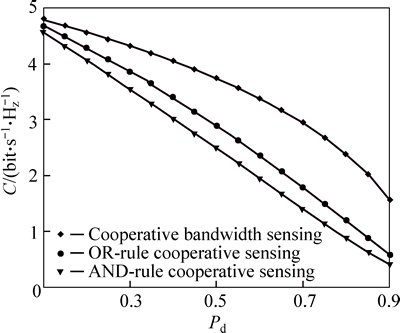
Fig. 14 Spectrum efficiency by different cooperative sensing methods
6 Conclusions
A weighed cooperative bandwidth spectrum sensing method is proposed to detect the PU��s presence throughout the whole frame time. The proposed sensing model is formulated as an optimization problem that aims to maximize the CRN��s spectrum efficiency by jointly optimizing sensing bandwidth proportion and number of cooperative SUs, while detection probability achieves its lower bound. Searching through the number of cooperative SUs from 1 to K, it is proven that the optimization problem relating to the sensing bandwidth proportion is convex, the optimal solution of which can be obtained through binary searching algorithm. Simulation results are shown to demonstrate that compared with the traditional cooperative time spectrum sensing, both the notable decrease on the interference and improvement on the spectrum efficiency can be obtained by the weighed cooperative bandwidth spectrum sensing.
Appendix A: Proof of Proposition 1
Since Q(x) is a monotonically decreasing function, from Eq. (23), if �� and N are both given, C(��, N, Pd) decreases monotonically with Pd. That is, with Pd��v, we have C(��, N, Pd)��C(��, N, v). Thus, only when Pd=v, C is maximized.
Appendix B: Proof of Proposition 2
Take the first-order and secondary-order partial derivatives of the objective function of Eq. (26) as shown in Eqs. (B1) and (B2), respectively.

 (B1)
(B1)
 (B2)
(B2)
Since A1>0, A2>0, A3>0 and 0��Q(x)��1, from Eq. (B1) we have
 (B3)
(B3)
which indicates that there is  to make
to make  namely, ��0(N) is an extremum point of C(��, N). Then we will prove that ��0(N) is also a maximal point. From
namely, ��0(N) is an extremum point of C(��, N). Then we will prove that ��0(N) is also a maximal point. From
 (B4)
(B4)
we have  and thus from Eq. (B2) we have
and thus from Eq. (B2) we have which indicates that C(��, N) is a convex function. Thus ��0(N) is the maximal point of C(��, N).
which indicates that C(��, N) is a convex function. Thus ��0(N) is the maximal point of C(��, N).
References
[1] Haykin S. Cognitive radio: Brain-empowered wireless communications [J]. IEEE Journal on Selected Areas in Communications, 2005, 23(2): 201-220.
[2] Ghasemi A, Sousa E S. Spectrum sensing in cognitive radio networks: Requirements, challenges and design trade-offs [J]. IEEE Communications Magazine, 2008, 46(4): 32-39.
[3] Mariani A, Giorgetti A, Chiani M. Effects of noise power estimation on energy detection for cognitive radio applications [J]. IEEE Transactions on Communications, 2011, 59(12): 3410-3420.
[4] Liu Xin, Tan Xue-zhi. Optimization for weighed cooperative spectrum sensing in cognitive radio network [J]. Applied Computational Electromagnetics Society Journal, 2011, 26(10): 800-814.
[5] Han W, Li J, Li Z, Shi J, Zhang Y. Efficient soft decision fusion rule in cooperative spectrum sensing [J]. IEEE Transactions on Signal Processing, 2013, 61(8): 1931-1943.
[6] LEE S, KIM S L. Optimization of time-domain spectrum sensing for cognitive radio systems [J]. IEEE Transactions on Vehicular Technology, 2011, 60(4): 1937-1943.
[7] Marinho J, Monteiro E. Cooperative sensing-before-transmit in Ad-hoc multi-hop cognitive radio scenarios [C]// International Conference on Wired Wireless Internet Communications. Santorini: Springer, 2012: 186-197.
[8] Liu Xin, Bi Guo-an, Guan Yong-liang, Lu Wei-dang, Yan Jun-hua, Zhong Wei-zhi. Joint optimisation algorithm of cooperative spectrum sensing with cooperative overhead and sub-band transmission power for wideband cognitive radio network [J]. Transactions on Emerging Telecommunications Technologies, 2015, 26(4): 586-597.
[9] Jamali V, Ahmadian M, Safavi S H, Ardebilipour M. Cooperative spectrum sensing in cognitive radio networks under primary outage constraint [C]// Iranian Conference on Electrical Engineering. Tehran: IEEE, 2012: 1368-1372.
[10] Zhao Qing, Ren Wei, Swami A. Spectrum opportunity detection: how good is listen-before-talk [C]// Asilomar Conference on Signals, Systems and Computers. Pacific Grove: IEEE, 2007: 767-771.
[11] Edward C Y P, Liang Ying-chang, Guan Yong-liang. Optimization of cooperative sensing in cognitive radio networks: a sensing-throughput tradeoff view [J]. IEEE Transactions on Vehicular Technology, 2009, 58(9): 5294-5299.
[12] Yu Huo-gen, Tang Wan-bin, Li Shao-qian. Optimization of cooperative spectrum sensing with sensing user selection in cognitive radio networks [J]. EURASIP Journal on Wireless Communications and Networking, 2011, 208: 1-8.
[13] Liu Xin, Tan Xue-zhi. Optimization algorithm of periodical cooperative spectrum sensing in cognitive radio [J]. International Journal of Communication Systems, 2014, 27(5): 705-720.
[14] Maleki S, ChepurI S P, Leus G. Optimization of hard fusion based spectrum sensing for energy-constrained cognitive radio networks [J]. Physical Communication, 2013, 9(12): 193-198.
[15] Sung K W, Kim S L, Zander J. Temporal spectrum sharing based on primary user activity prediction [J]. IEEE Transactions on Wireless Communications, 2010, 9(12): 3848-3855.
[16] Kim H, Shin K G. Efficient discovery of spectrum opportunities with MAC-layer sensing in cognitive radio networks [J]. IEEE Transactions on Mobile Computing, 2008, 7(5): 533-545.
[17] LIU Xin, ZHONG Wei-zhi, CHEN Kun-qi. Optimization of sensing time and cooperative user allocation for or-rule cooperative spectrum sensing in cognitive radio network [J]. Journal of Central South University, 2015, 22(7): 2646-2654.
[18] YUAN Fu, ZHENG Lin-hua, YUAN Ji-bing, WANG Zi-bin. Resource allocation for relay assisted cognitive radio network [J]. Journal of Central South University, 2013, 20(4): 969-976.
[19] Liu Xin, Jing Qing-feng, Jia Yun, Zhong Wei-zhi, Guan Yong-liang. Sensing-throughput tradeoff for cooperative multiple- input single-output cognitive radio [J]. International Journal of Communication Systems, 2015, 28(5): 848-860.
[20] Liu Xin, Jia Min, Gu Xue-mai. Joint optimal sensing threshold and subcarrier power allocation in wideband cognitive radio for minimising interference to primary user [J]. China Communications, 2013, 10(11): 70-80.
[21] Liu Xin, Bi Guo-an, Jia Min, Guan Yong-liang, Zhong Wei-zhi, Lin Rui. Joint optimization of sensing threshold and transmission power in wideband cognitive radio with energy detection [J]. Radio Science, 2013, 48(4): 359-370.
[22] Umebayashi K, Lehtomaki J J, Yazawa T, Suzuki Y. Efficient decision fusion for cooperative spectrum sensing based on OR-rule [J]. IEEE Transactions on Wireless Communications, 2012, 11(7): 2585-2595.
(Edited by FANG Jing-hua)
Foundation item: Project(61471194) supported by the National Natural Science Foundation of China; Project(BK20140828) supported by the Natural Science Foundation of Jiangsu Province, China; Projects(NS2015088, DUT16RC(3)045) supported by the Fundamental Research Funds for the Central Universities, China
Received date: 2015-04-16; Accepted date: 2015-09-13
Corresponding author: LIU Xin, Associate Professor, PhD; Tel: +86-15040511725; E-mail: liuxinstar1984@dlut.edu.cn
Abstract: In cognitive radio network (CRN), a secondary user (SU) may utilize the spectrum resource of the primary user (PU) and avoid causing harmful interference to the primary network (PN) via spectrum sensing. In the traditional time spectrum sensing, the SU cannot detect the PU��s presence during its transmission, thus increasing interference to the PN. In this work, a novel weighed cooperative bandwidth spectrum sensing method is proposed, which allows multiple SUs to use part of the bandwidth to perform cooperative spectrum sensing throughout the whole frame in order to detect the PU��s reappearance in time. The SU��s spectrum efficiency is maximized by jointly optimizing sensing bandwidth proportion, number of cooperative SUs and detection probability, subject to the constraints on the SU��s interference and the false alarm probability. Simulation results show significant decrease on the interference and improvement on the spectrum efficiency using the proposed weighed cooperative bandwidth spectrum sensing method.
