
��ȷ��������ϵͳ������H������
���˳�1�������1���Գ���2
(1. �������´�ѧ ��Ϣ��ѧ����ѧԺ������ ������116026��
2. ���ʼ�����ѧԺ ��Ϣ��ͨ�ż���ѧԺ, ˹�¸��Ħ��16440)
ժ Ҫ��
�١��������ⲿ���ŵȲ�ȷ�����ص�����ϵͳ���о���������H����������ơ����ö�����������״̬���Ϳ�����ͬʱ������������Ӧ��Lyapunov�ȶ���ԭ�������Ծ���ʽ��������������ϵͳ�����ȶ��ij������������������������Ʒ���������Ƶ���������������ʹϵͳ�����ȶ���������H������ָ�ꡣ��ֵ�������������㷨����Ч�ԡ�
�ؼ��ʣ�
��ȷ������������H���������Ծ���ʽ��
��ͼ����ţ�TP271 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0392-07
Quantized H�� control for uncertain networked system
WANG Xing-cheng1, LI Fang-wen1, ZHAO Cheng-xin2
(1. School of Information Science and Technology, Dalian Maritime University, Dalian 116026, China;
2. School of Information and Communication Technology, Royal Institute of Technology, Stockholm 16440, Sweden)
Abstract: Network-induced delay, data packet drop-out and perturbation are common problems for networked system. The designing of quantized feedback H�� controller, focusing on the above problem was studied. In this general model, two logarithms were quantized used for the quantizing of control signal and status signal, and the sufficient condition for the asymptotical stability of the network control systems and the design of quantized feedback controller was proposed according to the Lyapunov stability theory and linear matrix inequality. The quantized feedback controller can make the systems asymptotically stable and meet H�� performance. The design is confirmed to be efficient by the simulation result.
Key words: uncertainty network; quantization; H�� control; linear matrix inequality
�����������Ƕ��������ϵͳ�Ĺ�ע�������¡����о������У�һЩѧ�߷��֣��������ö��������ϵͳ��Ӱ��Ҫ�ȶԴ�ͳ�Ŀ���ϵͳ��Ӱ���öࡣ�ڿ���ϵͳ�м���������������Ч�˷�������������ƶ�ϵͳ��Ӱ�죬����ͨ��ͨ��������Ϣ�ĸ�������Լϵͳ��Դ����������������Ҳ���ϵͳ���������Ӱ��[1-3]����ˣ��о��������ö��������ϵͳ�������ܵ�Ӱ�죬��֤ϵͳ���ȶ��Ե÷dz���Ҫ����ͬʱ��������Ӱ��ͷ��������绷��Ӱ����о�����[4-7]����ˣ��б�Ҫ�������ϵͳ�ķ������о�������[8]����ͬʱ���ڵ�״̬�Ϳ�������2������������ɢ����ʱ����ϵͳ���ȶ�������������о���
������[8]�Ļ����ϣ����������о��˴��в�ȷ���������ⲿ�Ŷ�������ϵͳ��H�������������⡣���ȣ�������ӳٺͶ����ۺ���Ϣ�IJ�ȷ���������ģ�ͣ��������ν緽��[9]�µĶ������������ֱ��״̬���Ϳ������������������������綨��һ�����ν��ڣ�������������������ת��Ϊ������֪��³���������⣻Ȼ�������������ģ�ͣ��������������������ʹϵͳ�ﵽ�ȶ���ͬʱ��ʵ������H������ָ��á���MATLAB����������LMI�����������Ʒ�������K����������ָ��ã��������ֵ����ʵ��֤�����᷽������Ч�ԡ�
1 ��������
���Ǿ��в�ȷ���Ժ��ⲿ�Ŷ����������ϵͳ����ϵͳģ�ͱ�ʾ���£�
![]() (1)
(1)
ʽ�У�![]() ��u(k)
��u(k)![]() Rn��z(k)
Rn��z(k)![]() Rq��w(k)
Rq��w(k)![]() Rh�ֱ���״̬�������������롢����������ⲿ�Ŷ����룬A, B, Bw, C, Dw�ֱ��Ǿ����ʵ�ά���ľ���(k)=��sc(k)+d(k)����sc(k)�����������ӳٵ���Ϣ��d(k)���������綪������Ϣ����(k)��������������·�����绷��Ӱ�졣������ڳ�����m�ͦ�M��ʹ�æ�(k)
Rh�ֱ���״̬�������������롢����������ⲿ�Ŷ����룬A, B, Bw, C, Dw�ֱ��Ǿ����ʵ�ά���ľ���(k)=��sc(k)+d(k)����sc(k)�����������ӳٵ���Ϣ��d(k)���������綪������Ϣ����(k)��������������·�����绷��Ӱ�졣������ڳ�����m�ͦ�M��ʹ�æ�(k)![]() [��m, ��M], ��m, ��M�ֱ��Ǧ�(k)���½���Ͻ硣
[��m, ��M], ��m, ��M�ֱ��Ǧ�(k)���½���Ͻ硣
���о����Ŀ�������ϵͳ(1)����������������������ƣ�ʹϵͳ�ﵽ�����ȶ���ͬʱ���������H������ָ�ꡣ
������������Ϊ
![]()
��#g[��]���������[��, 1/��]�ϵ����������ĸ�������������������������ܶ�(��Ϊ��q)���£�
![]()
����1��һ������������Ϊ����������������������������Ϊ
![]()
��������ӳ���ϵQ(y):
 (2)
(2)
ʽ�У�yΪ�����������룬QΪ���������������Ϊ�������������=(1-��)/(1+��)������������(2),�����Ƶ�����q=2/[-ln(1/��)]����ʽ��ʾ�ѵ�ֵԽС�������ܶȦ�qԽС���������������˵�����Եȼ۵ذѦѳ�Ϊ�������������ܶȡ�
���ν��µĶ�����������ͼ1��ʾ��
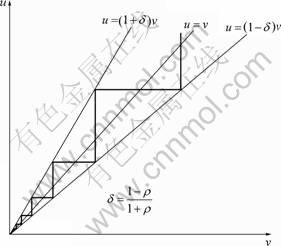
ͼ1 ����������
Fig 1 Logarithm quantizer
�����ν緽���£��������������������Ϊ��
![]()
���У�![]() �����������Ķ��������֪������������������ܶ��йء�
�����������Ķ��������֪������������������ܶ��йء�
��ͼ1���Կ����������ܶȦ�һ��ʱ����ԭ��ԽԶ��״̬�㣬��������Խ�֣���������Ҫ��״̬�ռ���״̬��λ����Ϣ�Ϳ�����Ϊ����Ϣ��Խ�١���ˣ���Ч���������ν緽���ڴ��������Ĺ����У������������˲�ȷ���Ļ�����Եģ���ͨ��һ���������ܶ��йص����εĽ罫�������н綨��
�����źŵ��������̣�q1(��)��q2(��)�ֱ�Ϊ״̬�źźͿ����źŵ���������
![]() (3)
(3)
�����ν���q1(��)��q2(��)���Ա�ʾΪ
![]() (4)
(4)
����
![]()
���ʽ(3)��(4)�������������õ�Ӱ�죬ϵͳ��״̬�����������ɱ�ʾΪ��
![]() (5)
(5)
����![]()
���ʽ(1)��(5)����ԭϵͳ�ɱ�Ϊ��
![]() (6)
(6)
2 �ȶ��Է��������������������
����H������ָ�꣺
![]()
���о���Ŀ������Ʒ�������K��ʹ��ϵͳ(6)�ڿ�����(5)����������������������
1) ��w(k)=0ʱ��ϵͳ�����ȶ���
2) �����ʼ�����£�����������
![]()
��![]() ��
��
����1[10]���������x, y![]() Rn��n�������Գƾ���P
Rn��n�������Գƾ���P![]() Rn��n��������IJ���ʽ������
Rn��n��������IJ���ʽ������
2xTy��xTP-1x+yTPy
����2��D, E��F�Ǿ����ʵ�ά���ľ���������||F||��1��������ı����ţ�0�������治��ʽ������
DEF+ETFTDT�ܦ�-1DDT+��ETE
����1�����Ǵ�����������������(5)���������ϵͳ(6)�����ڸ����ij�����m, ��M��H������ָ��ú;���K����������ʵ�ά���ľ���P��0��Q1��0��Q2��0��R1��0��R2��0��N1��N2��M1��M2��S1��S2��S3��ʹ���в���ʽ������
 ��0 (7)
��0 (7)
����
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
��ϵͳ(6)�ڿ�����(5)�������½����ȶ�,�Ҷ���������w(k)![]() L2[0, ��)������||z(k)||2�ܦ�||w(k)||2��
L2[0, ��)������||z(k)||2�ܦ�||w(k)||2��
֤��������ϵͳ(6)ѡ��Lyapunov������
![]() (8)
(8)
����
![]()
![]() (9)
(9)
��V(k)ǰ���֣��ɵã�
![]() (10)
(10)
����
![]() ��
��
![]() ��
��
![]() (11)
(11)
���ʽ(9)��(11)���������ʵ������ɾ����Եõ���
?V(k)��
![]() (12)
(12)
����
Ӧ������1���Եõ���
![]() ��
��
![]()
![]() ��
��
![]() ��
��
![]() (13)
(13)
��ʱ����2���������ϵͳ���ȶ��ԡ�
(1) ��w(k)=0�����ʽ(12)��(13)���Եõ���
?V(k)��
![]() (14)
(14)
����Schur�����������ʽ(7)��������ʽ
?V(k)��![]() ��0(15)
��0(15)
��������˵�w(k)=0��ϵͳ(6)�ǽ����ȶ��ġ�
(2) ��w(k)��0�����ʽ(12)��(13)�ɵõ�:
?V(k)��
![]() ��
��
![]()
����Schur�����������ʽ(7)��������ʽ
![]() ��0 (16)
��0 (16)
�����������ʼ�����£���ʽ(16)���ߴ�k=0�ۼӵ�k=����ͣ����Եõ�ϵͳ��H������ָ������
![]() ��0
��0
��||z(k)||2�ܦ�||w(k)||2
֤�ϡ�
������ʽ(7)�У���(K)=��1K+K��2+��1K��2��һ�ַ����Ե���ʽ���ڣ���LMI��ֱ������ʽ(7)��ⷴ������K�����ô���������ķ�������ʽ(7)�������� ��д��
����2�����Ǵ�����������������(5)��ϵͳ(6)�����ڸ����ij�����m����M��H������ָ��ú;���K����������ʵ�ά���ľ���P��0��Q1��0��Q2��0��R1��0��R2��0��N1��N2��M1��M2��S1��S2��S3�ͱ�����i��0(i=1, 2, 3)��ʹ���в���ʽ������
 (17)
(17)
���У���21����22��������1����2����3����4�Ķ��������1��
![]()
![]()
![]()
![]()
![]()
��ϵͳ(6)�ڿ�����(5)�������½����ȶ�,�Ҷ���������w(k)![]() L2����||z(k)||2�ܦ�||w(k)||2��
L2����||z(k)||2�ܦ�||w(k)||2��
֤����ʽ(7)�еĦ�11��д��������ʽ
![]()
![]() (18)
(18)
Ӧ������2�����ڦ�i��0(i=1, 2, 3)ʹ��
![]()
![]() (19)
(19)
���⣬
![]()
����ʽ(7)��(19)��Ӧ��Schur���������Եõ�ʽ(17)��
֤�ϡ�
���ڶ���2�����������������������(5)ʹϵͳ(6)�����ȶ���������H������ָ��ã����������������������K����Ʒ�����
����3�����Ǵ�������������(5)���������ϵͳ(6)���Ը����ij�����m����M��H������ָ��ú������ܶȦ�1����2��������ڱ����;�![]() ��0��
��0��![]() ��0��
��0��![]() ��0��
��0��![]() ��0��
��0��![]() ��0��
��0��![]() ��
��![]() ��
��![]() ��
��![]() ��X��Y�ͦ�i��0 (i=1, 2, 3)��ʹ���в���ʽ����
��X��Y�ͦ�i��0 (i=1, 2, 3)��ʹ���в���ʽ����
 ��0
��0
����

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
��ϵͳ(6)������������(5)�������½����ȶ������Ʒ�������ΪK=Y(X -)T���Ҷ���������w(k)![]() L2����||z(k)||2�ܦ�||w(k)||2��
L2����||z(k)||2�ܦ�||w(k)||2��
֤��������![]() ��
��![]() ��
��![]() ��K=Y(X -)T����ʽ(17)����ͬʱ����ҳ�diag(X��X��X��X��X��X��I��I��I��I��I��I��I��I)������ת�ã��������¾���
��K=Y(X -)T����ʽ(17)����ͬʱ����ҳ�diag(X��X��X��X��X��X��I��I��I��I��I��I��I��I)������ת�ã��������¾���![]()
![]()
![]()
![]()
![]() (i=1, 2)��������Schur������������ʽ(17)�Ƶ�ʽ(20)������
(i=1, 2)��������Schur������������ʽ(17)�Ƶ�ʽ(20)������
֤�ϡ�
����ʽ(20)��������������K����������ָ��ÿ�������Matlab�е�LMI�����������⡣
3 ��ֵ����
����ϵͳ������������ϵͳ��
ѡȡ�����ܶ�ѡΪ��1=��2=0.6���ɦ�=(1-��)/(1+��)�ɵæ�1=��2=0.25��ȡ����������1=8.6����2=12.4����m=1����M=5����w(k)=0ѡȡ��ʼ����x(k)=��(k)��k=-��M��-��M+1������-1��0����w(k)��0ʱ��w(k)Ϊ����Ŷ�������Matlab��LMI��������ⲻ��ʽ(20)���������H����������ָ���=0.324��K=[-1.229��-0.529]������õ�ϵͳ(6)�ں�ʱ��״̬��Ӧx(k)��ͼ2��3��ʾ��
��ͼ2���Կ�������w(k)=0��������Ƶ�����״̬��������������ʹϵͳ�ﵽ�����ȶ������������ٶȱ����ö�̬��������ö�[8]�����Ժܿ�ﵽ�����ȶ���

ͼ2 w(k)=0ʱϵͳ��״̬��Ӧ
Fig.2 State response of w(k)=0
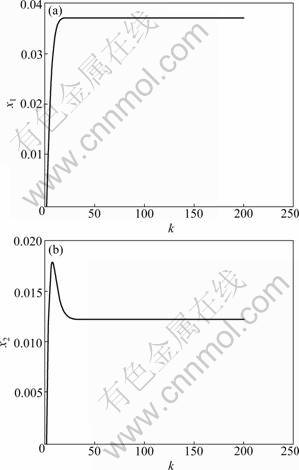
ͼ3 w(k)��0ʱϵͳ��״̬��Ӧ
Fig.3 State response of w(k) ��0
��ͼ3���Կ�������w(k)��0ʱ���Ŷ�Ϊ����Ŷ�����ֵΪ10�����о�����Ƶ�����״̬�������������Ա�֤ϵͳ������һ���н������ڣ���ʹ����������H������ָ��||z(k)||2�ܦ�||w(k)||2��ͼ2��3�ķ�����֤�������᷽������Ч�ԡ�
������[8]�Ƚϣ����þ�̬�Ķ����������������ö�̬�����������������٣�����һ����³���ԣ�����ʵ��Ӧ���У���̬��������������һ����������ʵ ���ԡ�
4 ����
�о��˾��������ӳ١��������ⲿ�Ŷ������صIJ�ȷ���������ϵͳ������H���������⣬���ö������������������綨��һ�����ν��ڣ���Ӧ��Lyapunov�ȶ���ԭ�������Ծ���ʽ����������������ϵͳ�����ȶ��ij��������������������������ƣ�ͬʱ��������H������ָ�ꡣ��ֵ�������������㷨����Ч�ԡ�
�ο����ף�
[1] Kalman R E. Nonlinear aspect of sampled-data control system [C]//Proc of the Symposium on Nonlinear Circuit Theory. Brooklyn, 1956: 273-313.
[2] Delchamps D. The stabilization of linear systems with quantized feedback[C]//Proceedings of IEEE Conf Decision and Control. Austin, 1988: 405-410.
[3] Brockett R W, Liberzon D. Quantized feedback stabilization of linear systems[J]. IEEE Trans on Automatic Control, 2000, 45(7): 1279-1289.
[4] He Y, Liu G P, Rees D, et al. Improved stabilization method for networked control systems[J]. IET Proc Control Theory Appl, 2007, 1(1): 1580-1585.
[5] Yue D, Lam J, Wang Z. Persistent disturbance rejection via state feedback for networked control systems[J/OL]. Chaos Solitons and Fractals, 2007. doi:10.1016/j.chaos.2007.07.073.
[6] Yue D, Peng C, Tang G Y. Guaranteed cost control of linear systems over networks with state and input quantizations [J]. IEE Proceedings: Control Theory and Applications, 2006, 153(6): 6548-664.
[7] Peng C, Tian Y C. Networked H�� control of linear systems with State quantization[J]. Informat Sci, 2007, 177: 5763-5774.
[8] Zhai G, Matsumoto Y, Chen X, et al. Hybrid stabilization of linear time invariant systems with two quantizers[C]//Proc of the 2004 IEEE Int Symposium on Intelligent Control. Taipei, 2004: 305-309.
[9] Fu M, Xie L. The sector bound approach to quantized feedback control[J]. IEEE Transactions on Automatic Control, 2005, 50: 1698-1710.
[10] Cao Y Y, Sun Y X, Lam J. Delay dependent robust H�� control for uncertain systems with time varying delays[J]. IEE Proceedings: Control Theory and Applications, 1998, 143(3): 338-34.
(�༭ ���)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(60574018)
ͨ�����ߣ����˳�(1956-)���У�������ͼ�ˣ����ڣ���ʿ����ʦ������³���������ۡ������˶��о���E-mail: xc_wang@dl.cn
ժҪ����Ծ��������ӳ١��������ⲿ���ŵȲ�ȷ�����ص�����ϵͳ���о���������H����������ơ����ö�����������״̬���Ϳ�����ͬʱ������������Ӧ��Lyapunov�ȶ���ԭ�������Ծ���ʽ��������������ϵͳ�����ȶ��ij������������������������Ʒ���������Ƶ���������������ʹϵͳ�����ȶ���������H������ָ�ꡣ��ֵ�������������㷨����Ч�ԡ�
