
DOI: 10.11817/j.issn.1672-7207.2019.04.015
������ֱ�����������Կ����������H2/H����Ͽ���
������1����ǿ2��������1������ǿ1
(1. �Ͽ���ѧ �˹�����ѧԺ�����300350��
2. ���������ѧ ��������ӹ���ѧԺ�����300384)
ժ Ҫ��
�����Ĺ켣���ٿ��ƣ����������Կ����������H2/H����Ͽ������һ�ַ�����³�����Ʋ��ԡ������������ա�ŷ�����̽���������ֱ�����ķ�������ѧģ�ͣ������仮��Ϊ��ת�˶���ϵͳ��ƽ���˶���ϵͳ������ת�˶���ϵͳ�У�ѡȡ������H2/H����Ͽ���ʵ����̬�ǵ��ȶ����ƣ���ƽ���˶���ϵͳ�У����������Կ��ſ������λ��ϵͳ�ĸ��ٿ��ơ��о�����������ڿ��Dz�����ȷ���Ժͳ����ⲿ�Ŷ�������£�������Ŀ��Ʋ���³���Խ�ǿ�����нϺõĸ���Ч���Ϳ������ܡ�
�ؼ��ʣ�
���˻�������������H2/H��Ͽ����������Կ��ſ�����������ֱ������³��������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2019)04-0873-08
Quadrotor helicopter control based on LADRC &nonlinear mixed H2/H�� control structure
LIU Junjie1, GAO Qiang2, SUN Mingwei1, CHEN Zengqiang1
(1. College of Artificial Intelligence, Nankai University, Tianjin 300350, China;
2. School of Electrical Engineering, Tianjin University of Technology, Tianjin 300384, China)
Abstract: In order to realize the path tracking for a quadrotor helicopter, a nonlinear robust control strategy based linear active disturbance rejection control(LADRC) and nonlinear mixed H2/H�� control was proposed. The nonlinear model for the helicopter obtained by the Lagrange-Euler formalism was divided into rotational motion subsystem and translational motion subsystem. To stabilize the rotational movements, a nonlinear mixed H2/H�� controller was used. To track the reference trajectory, a linear active disturbance rejection controller was designed for translational motion subsystem. The results show that the proposed nonlinear robust control strategy has high performance and strong robustness in the presence of the parametric uncertainty and sustained external disturbance.
Key words: unmanned aerial vehicle(UAV) control; nonlinear mixed H2/H�� control; linear active disturbance rejection control(LADRC); quadrotor helicopter; robust control
���˻�(unmanned aerial vehicle��UAV)Ҳ�ơ����˷����������������ط���Ա�Ŀ��з�����[1]�������������ſ�ѧ���������Ǵ����������Ϳ������۵IJ������[2]�� ���˷������ķ�չ���Զ������������������ǵĸ߶ȹ�ע���������˷������Ѿ�������ִ�и�������������⡢�߿պ��ġ�������֡���������[3]����ˣ���չ���д�ֱ���ܵĸ����ԡ�ǿ�ȶ��Ե����˷����������о��ڿ��л��������������ش���Ϊһ�ֵ��͵Ĵ�ֱ�����˷�����������������ֱ�����ṹ��ͨ��2������������ƽ����ʵ���ȶ���ͣ�ı����״̬��������ɵ��ٷ��еȶ���[4]��Ȼ����������ֱ�����Ŀ�������Ŀ����ϵͳ�����ɶȣ�����Ƿ����ϵͳ����ʵ�ʷ��й��������������Ӱ�죬��һ��������ǿ��������ȷ�������ǿ�����������еĸ��Ӷ�������ٿ��������Ϊ����������ѵ���ȵ㡣��Լ�������ֱ����ģ�ͣ������������㷨��PID����[5-6]��LQR����[7]�Լ�����H������[8]������������ֱ����ģ���е�ǿ�����ԣ����ڷ��й��������ܷ�����������Ӱ�죬��������Զ��ƽ���ʱ�����Կ����㷨����ʧЧ����ˣ��о���Աʹ�÷�����[9-10]���������Ի�[11]����ģ����[12]������Ͳ������[13]�Լ�������H������[14]�ȷ����Կ��Ʒ������п�������ơ������������-ŷ�������Ƶ��ķ�����ģ�ͣ�RAFFO��[14]���÷�������H�����ƶ�������ֱ����ϵͳ�еij����ⲿ�Ŷ��������ơ�MOKHTAR��[15]����������ֱ����������ģ�͵IJ�ȷ���ԣ���Ʒ�����H����������������������ø߽�ģ�۲��������Ŷ����ơ�RAFFO��[16]���һ�ַ�����³�����ƽṹ����������ֱ����ϵͳ����Ϊ��ת�˶���ϵͳ��ƽ���˶���ϵͳ�������÷�����H������������ת�˶�����������ģ��Ԥ�����ʵ��λ������ĸ��ٿ��ơ��Կ��ſ���(active disturbance rejection control��ADRC)�Ǻ�����[17]�����һ������ʵ�ÿ��Ƽ������䲻����ϵͳ�ľ�ȷģ�ͣ���ֱ�����ñ��ض�������������Ϣ��ϵͳ״̬�Լ������Ŷ������й��Ʋ����߲���[18]���ڴ˻����ϣ�GAO[19]���������Կ��ſ������еķ����Ի��ڽ������Ի��������������ADRC�IJ�������������Ŀǰ���Կ��ſ�������Ӧ���ڸ��������繤ҵ����[20]���ŷ�ϵͳ[21]�������˿���[22]�ȡ������������������ֱ�����ķ�����ģ�ͣ����仮��Ϊ��ת�˶���ϵͳ��ƽ���˶���ϵͳ���ڿ��dz����ⲿ�Ŷ�������£����������Կ��ſ��ƽ��ƽ���˶���ϵͳλ������ĸ������⣻����������ֱ��������ת�˶�������һ�ַ�����H2/H����Ͽ��Ʒ������������ⲿ���ŵ�ͬʱ�������õĸ������ܡ�
1 ϵͳģ��
����ϵʾ��ͼ��ͼ1��ʾ��������ֱ��������6�����ɶȡ�ͼ1�У� ��
�� ���ֱ��ʾ������ֱ�����ڹ�������ϵ�е�λ�ú���̬��(��ת��������ƫ��)��
���ֱ��ʾ������ֱ�����ڹ�������ϵ�е�λ�ú���̬��(��ת��������ƫ��)�� ����ʾ��������ϵ��Xb��ָ��ɻ�ǰ������Yb��Xb������Zb��ֱ��XbOYb��ָ���Ϸ�����������ϵ
����ʾ��������ϵ��Xb��ָ��ɻ�ǰ������Yb��Xb������Zb��ֱ��XbOYb��ָ���Ϸ�����������ϵ Ϊ��������ϵ����̬������ʾ��������ϵ���������ϵ֮�����ת��ϵ�����ǵ���������ϵ������x��y��z�����ת��ϵ���Եõ��ӻ�������ϵ����������ϵ��ת������RbΪ
Ϊ��������ϵ����̬������ʾ��������ϵ���������ϵ֮�����ת��ϵ�����ǵ���������ϵ������x��y��z�����ת��ϵ���Եõ��ӻ�������ϵ����������ϵ��ת������RbΪ
 (1)
(1)
������ת���ۣ��ɵû�����3��������Ľ��ٶ� ��ŷ�����Ĺ�ϵΪ
��ŷ�����Ĺ�ϵΪ
 (2)
(2)
����
 (3)
(3)
���û��ڶ��ܺ����ܵ���������-ŷ�����̣��ɽ����������˷��������˶����̱�ʾΪ[17]
 (4)
(4)
 (5)
(5)
���У�LΪ���������˷�����ģ�͵������������ӣ� Ϊƽ���˶����ܣ�
Ϊƽ���˶����ܣ� Ϊ��ת�˶����ܣ�EpΪϵͳ�����ܡ�
Ϊ��ת�˶����ܣ�EpΪϵͳ�����ܡ�

ͼ1 ����ϵʾ��ͼ
Fig.1 Diagram of coordinate system
�����������ʸ�� ,
, ,
, ��
�� ��
�� ��
�� ������
�����У� Ϊ��ת��������ƫ���˶������أ�
Ϊ��ת��������ƫ���˶������أ� Ϊ���õ�������ƽ��������
Ϊ���õ�������ƽ�������� ��
�� Ϊ��������ʸ����
Ϊ��������ʸ���� �����������������Ӳ�����
�����������������Ӳ����� ��
�� ����������ԣ���������-ŷ�����̿��Ա���Ϊƽ���˶����̺���ת�˶����̡�ƽ���˶����̿������µ�ʽ��ʾ��
����������ԣ���������-ŷ�����̿��Ա���Ϊƽ���˶����̺���ת�˶����̡�ƽ���˶����̿������µ�ʽ��ʾ��
 (6)
(6)
��
 (7)
(7)
���У�mΪ����������gΪ�������ٶȣ� Ϊ�ⲿ�Ŷ���
Ϊ�ⲿ�Ŷ���
�������NΪ������ʽ��
 (8)
(8)
���У� ��Ϊת��������������ת���ܷ��̿��Ա�ʾΪ
��Ϊת��������������ת���ܷ��̿��Ա�ʾΪ
 (9)
(9)
�� ����������-ŷ����ת���̿������±�ʾΪ
����������-ŷ����ת���̿������±�ʾΪ
 (10)
(10)
����

 (11)
(11)
 ��
��

 ��
��
 ��
��

 ��
��
 ��
��

 ��
��
 ��
��


 ��
��

 ��
��
��ˣ�������������-ŷ�����̵�����������ֱ������ת�˶��ķ�������ѧģ��Ϊ
 (12)
(12)
������������ֱ�����ķ�������ѧģ��Ϊ
 (13)
(13)
2 ���Ʋ���
��������ֱ��������ѧģ�Ϳ�֪���������ڷ��й����п�����ֱ�������ڷ�������̬����߶ȣ���̬����ֱ��Ӱ���������ˮƽλ�ã���ˣ����п��������������Ľṹ����������������ֱ�����IJ�����ȷ����δ��ģ��̬���ⲿ�Ŷ������һ�ַ�����³�����Ʋ��ԣ���ʵ����·�����ٿ��ƣ�����ƽṹ��ͼ2��ʾ��ʽ(13)��������ֱ����ϵͳ��Ϊ��ת�˶���ƽ���˶���Ϊ���������ֱ������ת�˶��������⣬���ƽṹ�ڻ�����һ�ַ����� ��Ͽ��Ʒ������ڿ��Dz�����ȷ���Ժͳ����ⲿ�Ŷ�������£�ʵ����̬�Ǻ���̬���ٶȵ��ȶ����ơ�����ƽ���˶����ڿ��ƽṹ����������Կ��ſ�������ʵ��������ֱ����λ�õĹ켣���ٿ��ơ�λ�òο��ź��ɲο�·��������������������δ��ģ��̬�ͳ����ⲿ�Ŷ�ʱ��������Ƶ������Կ��ſ������������Ŷ����Ʋ����貹����
��Ͽ��Ʒ������ڿ��Dz�����ȷ���Ժͳ����ⲿ�Ŷ�������£�ʵ����̬�Ǻ���̬���ٶȵ��ȶ����ơ�����ƽ���˶����ڿ��ƽṹ����������Կ��ſ�������ʵ��������ֱ����λ�õĹ켣���ٿ��ơ�λ�òο��ź��ɲο�·��������������������δ��ģ��̬�ͳ����ⲿ�Ŷ�ʱ��������Ƶ������Կ��ſ������������Ŷ����Ʋ����貹����
2.1 ��ת�˶���ϵͳ����
����ʽ(13)���ڿ����Ŷ�������£�����������ֱ��������ת�˶�����Ϊ
 (14)
(14)
���������
 (15)
(15)
ʽ�У�
 ��
�� ���ֱ��ʾ��̬���趨ֵ����̬���ٶ��趨ֵ��
���ֱ��ʾ��̬���趨ֵ����̬���ٶ��趨ֵ��
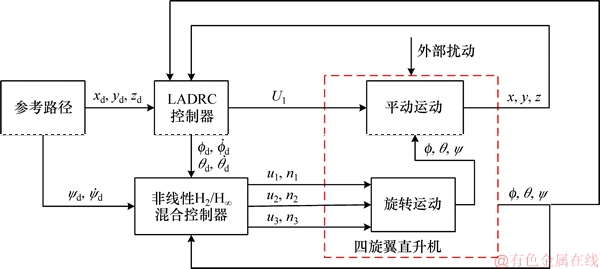
ͼ2 ���ƽṹ
Fig. 2 Control structure
����T������ʽ���£�
 (16)
(16)
���У� ��a��bΪ����������O��I�ֱ�Ϊ3�������͵�λ����
��a��bΪ����������O��I�ֱ�Ϊ3�������͵�λ����
��ʽ(14)��ʽ(15)�����Ƶ�����������״̬�ռ����ʽ��
 (17)
(17)
����
 ��
��
 ��
��
 ��
��
 ��
�� ��
��
���ڸ���ת��ϵͳ����������¿����ɣ�

 (18)
(18)
�����״̬����������ֱ������ת�˶����̿������±���Ϊ
 (19)
(19)
���У�uΪ�������룻nΪ�ⲿ�Ŷ���
���ھ��в�����ȷ�����ⲿ�Ŷ�����������ת�˶�ϵͳ������Ȩ����Q1��Q1f��Q2��Q2f��R1��R2��Pȫ��Ϊ�Գ��������� �������£�������������H���Ŷ��������Χ�ڣ�
�������£�������������H���Ŷ��������Χ�ڣ�

 (20)
(20)
���� ���Ÿ��ٿ���
���Ÿ��ٿ���
 (21)
(21)
������H2/H����Ͽ�������ʵ�����ȶ�����(���У�ti��tf��ʾ���Ƶij�ʼ������ʱ��)������2������ָ�����£�

 (22)
(22)

 (23)
(23)
����Ҫ���������Ϊ

 (24)
(24)
���У�u*��n*�ֱ�������ſ������������Ŷ����Ρ�
����1[23]������ʽ(19)�е����״̬ϵͳ�����ſ��ƺ���Ŷ����Էֱ�ѡ��������ʽ��
 (25)
(25)
 (26)
(26)
���� ��
�� Ϊ��Ϸ�����ʱ��Riccati��ʽ���̵Ľ⣬������ʽ�ο�����[23]��
Ϊ��Ϸ�����ʱ��Riccati��ʽ���̵Ľ⣬������ʽ�ο�����[23]��

 ��
��
��ѡ�� ��
�� ������ʽ(25)��(26)����ʽ(25)��(26)�ͳ�Ϊʽ(24)��H2/H����Ͽ������Ÿ�������Ľ⡣
������ʽ(25)��(26)����ʽ(25)��(26)�ͳ�Ϊʽ(24)��H2/H����Ͽ������Ÿ�������Ľ⡣
����2����R1��R2��R����Ϊ
 (27)
(27)
ѡȡQ1��Q2Ϊ
 (28)
(28)
����Q11=q11I��Q22=q22I��q11��0��q22��0��
������ʱ��Riccati��ʽ���̽�Ϊ
 (29)
(29)
ת������Tѡ��������ʽ��
 (30)
(30)
����a��b�ֱ�Ϊ��
 ��
�� ��
��
2.2 ƽ���˶���ϵͳ����
��ʽ(7)�е�ϵͳ���±���Ϊ״̬�ռ���ʽ ����
����



 ����
����
 (31)
(31)
����

 ��
��
2.2.1 �߶ȿ���
�Ը߶ȿ���Ϊ��������Կ��ſ�������ʹ������ܹ������ȶ������趨ֵ�����Ǹ߶�ϵͳ���£�
 (32)
(32)
���� ��
�� ��
��
��x3=f1��Ϊ�߶�ͨ��������״̬�����䵼��Ϊh1����ʽ(32)��ʾϵͳ��������Ϊ
 (33)
(33)
���У�x1=z��ʾ�߶ȣ�U1Ϊ�������롣
ʽ(33)��Ӧ������״̬�۲������Ϊ
 (34)
(34)
���У�zi(i=1��2��3)Ϊ״̬xi(i=1��2��3)�Ĺ���ֵ����i(i=1��2��3)Ϊ�۲������棬Ϊ�ɵ��������� ��
�� ��
�� ����o1Ϊ�۲���������
����o1Ϊ�۲���������
�����ɼ���������Ϊ��
 (35)
(35)
 (36)
(36)
�������������� ��
�� ����c1Ϊ������������zdΪ�߶��趨ֵ��
����c1Ϊ������������zdΪ�߶��趨ֵ��
2.2.2 �������˶�����
�����������������˶��ͺ����˶�����������Կ��ſ�����ʱ����ƿ�����u0i(i=1��2)���������Ŷ������Ӧͨ��������״̬�۲����Ŀ������룬ux��uy�ֱ��ʾ�����˶��ͺ����˶�ͨ������������ɣ�����̬���趨ֵ��d��fd�Ĺ�ϵΪ
 (37)
(37)
 (38)
(38)
�������������˶���״̬�ռ����ʽΪ
 (39)
(39)
���� ��
�� ��
��
��x6=f2��Ϊ�����˶�ͨ��������״̬�����䵼��Ϊh2����ʽ(39)��ʾϵͳ��������Ϊ
 (40)
(40)
ʽ(40)��Ӧ������״̬�۲��������Ϊ
 (41)
(41)
���У�zi(i=4��5��6)��״̬xi(i=4��5��6)�Ĺ���ֵ����i(i=4��5��6)Ϊ�۲������棬Ϊ�ɵ��������� ��
�� ��
�� ��
�� Ϊ�۲���������
Ϊ�۲���������
���Ӧ�Ŀ����ɿ���ѡ��Ϊ
 (42)
(42)
 (43)
(43)
�������������� ��
�� ��
�� Ϊ������������xdΪ�����ƶ��趨ֵ��
Ϊ������������xdΪ�����ƶ��趨ֵ��
���ڷ������ĺ����˶�����״̬�ռ����ʽΪ
 (44)
(44)
������ ��
��
ͬ�����ɵ��������������˷����������˶��Ŀ�������ƣ�
 (45)
(45)
���У� (i=7��8��9)Ϊ����ͨ��״̬�����Ŷ��Ĺ���ֵ����i (i=7��8��9)Ϊ�۲������棻b03Ϊ�ɵ���������7=3��o3��
(i=7��8��9)Ϊ����ͨ��״̬�����Ŷ��Ĺ���ֵ����i (i=7��8��9)Ϊ�۲������棻b03Ϊ�ɵ���������7=3��o3�� ��
�� ����o3Ϊ�۲���������u02Ϊ�������ɣ�����������
����o3Ϊ�۲���������u02Ϊ�������ɣ����������� ��
�� ����c3Ϊ������������ydΪ�����ƶ��趨ֵ��
����c3Ϊ������������ydΪ�����ƶ��趨ֵ��
3 ������
�����У�ѡȡ����������ֱ��������������Ϊ��������m=2.85 kg������l=0.197 m��x��y��z��ת�������ֱ�ΪIxx=Iyy=0.055 2 kg��m2�� kg��m2���������ٶ�g=9.81 m/s2���ο�·���趨Ϊ��x����仯�趨ֵ
kg��m2���������ٶ�g=9.81 m/s2���ο�·���趨Ϊ��x����仯�趨ֵ ��y����仯�趨ֵ
��y����仯�趨ֵ ��z����仯�趨ֵ
��z����仯�趨ֵ ��ƫ�����趨ֵ
��ƫ�����趨ֵ ���������ij�ʼλ���趨Ϊ(x��y��z)=(0��0��0) m����ʼ��̬���趨Ϊ(f���ȣ���)=(0��0��0) rad����λ�ú���̬���ͨ���зֱ����Ӱ������Ŷ�������Ϊ10-7���ڷ�������У����Dz����IJ�ȷ���ԣ��Թ��Բ������¸���20%���з��沢�ȽϽ�������У������Ի��H2/H������������������Ϊ����=1����=0.5��q22=1��LADRC��������������Ϊ��b01=1��b02=0.9��b03=0.9����o1=40����c1=150����o2=10����c2=5����o3=10����c3=5��
���������ij�ʼλ���趨Ϊ(x��y��z)=(0��0��0) m����ʼ��̬���趨Ϊ(f���ȣ���)=(0��0��0) rad����λ�ú���̬���ͨ���зֱ����Ӱ������Ŷ�������Ϊ10-7���ڷ�������У����Dz����IJ�ȷ���ԣ��Թ��Բ������¸���20%���з��沢�ȽϽ�������У������Ի��H2/H������������������Ϊ����=1����=0.5��q22=1��LADRC��������������Ϊ��b01=1��b02=0.9��b03=0.9����o1=40����c1=150����o2=10����c2=5����o3=10����c3=5��
�������Ŷ���·������Ч����ͼ3��ʾ��������ֱ�����ӳ�ʼλ��(x��y��z)=(0��0��0) m��ʼ�����趨·�����з��У��ο�·�����Ϊ(x��y��z)=(0��0��1) m�����ó����İ������źŸ�����ģ��ʵ�ʷ��в����IJ��������ⲿ���ŵ����أ���ˣ��ڷ������У�ϵͳ������ڲ�ͬ�̶ȵIJ�������ͼ3���Կ�����������ֱ�����켣�ܹ��Ϻõ��ڽ϶�ʱ���ڵ���Ԥ���趨ֵ�����Ϻõذ���Ԥ��·�߷��У��ڶԱ�ƹ��Բ�������20%���¸���ʱ�����й켣û�з����ϴ�仯��˵��ϵͳ���н�ǿ��³���ԡ�
������ֱ�������˶���λ������x��y��z�ı仯���̼�ͼ4������x�ڴ�Լ2 s�ܹ�Ѹ�ٸ����趨ֵ����Ӧ�ٶȽϿ죬y��z���ܽϺõ��ȶ�����Ԥ��ֵ���������Ŷ���λ�ø�������ͼ5����ͼ5���Կ�����
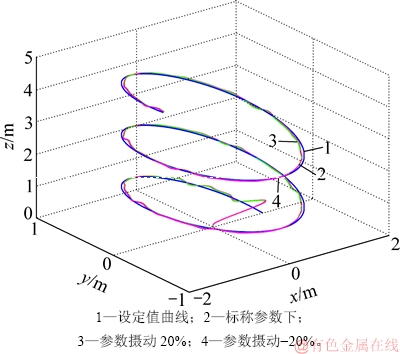
ͼ3 �������Ŷ���·������Ч��
Fig. 3 Path tracking under white noise disturbance
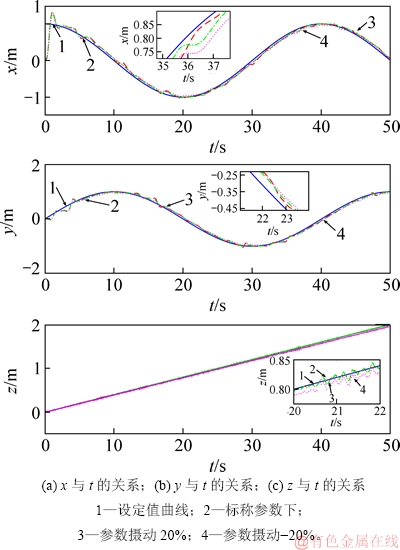
ͼ4 �������Ŷ���λ������仯
Fig. 4 Position coordinates under white noise disturbance
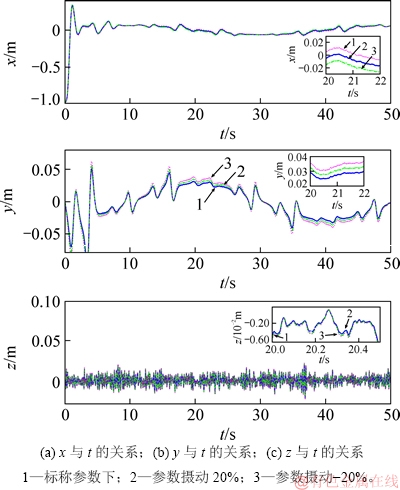
ͼ5 �������Ŷ���λ�ø������
Fig. 5 Attitude angle tracking error under white noise disturbance
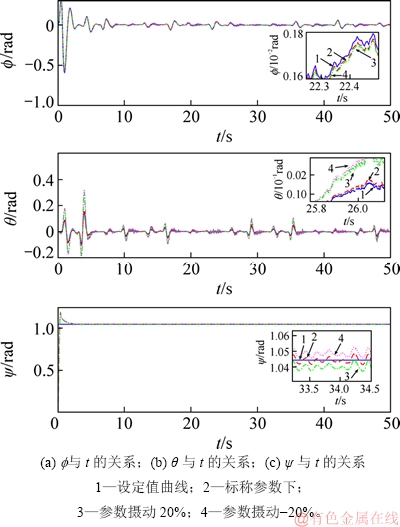
ͼ6 �������Ŷ�����̬�DZ仯
Fig. 6 Attitude angle under white noise disturbance
��ģ���б�ƹ��Բ�������20%���¸������������������ֲ��䣬ϵͳ�����Ȼ�ܹ����ֽ�С�ĸ�����˵�������õĿ�������������ֱ�����IJ�����ȷ���Ծ��н�ǿ��³���ԡ�ͼ6��ʾΪ������ֱ������ת�˶��и���̬�ǵı仯�������ͼ6�ɼ����������������£���ת��f�����Ǧ��ܹ���ƽ�ȵر仯��ƫ���Ǧ��ڴ�Լ2 s�ﵽ�趨ֵ�����ܲ���һ���ij����������ܹ�Ѹ�ٵ����ȶ��趨ֵ�����ֲ��䣬�ڹ��Բ������� 20%�仯ʱ����Ȼ���Ա��ֽϺõĿ���Ч����
20%�仯ʱ����Ȼ���Ա��ֽϺõĿ���Ч����
4 ����
1) ���������ֱ�����Ĺ켣�������⣬�����һ�������Կ����������H2/H����Ͽ��ƽ�ϵĿ��Ʋ��ԡ����ȣ�������������-ŷ�����̻��������ֱ������ǿ��������ѧģ�͡��ڴ˻����ϣ���λ��ϵͳ�е�δ֪�Ŷ���Ϊϵͳ������״̬���������Ӧ�������Կ��ſ������������̬���ȶ����ٿ������⣬������һ�ַ�����H2/H����Ͽ��Ʒ������ܹ�ʹ����˥����ͬʱ�������õ�H2�������ܡ�
2) ��������Ƶ�������ֱ�����ȶ������㷨�ܹ��Ϻõ�����ϵͳ������ȷ���Ժ��ⲿ�Ŷ���Ӱ�죬������Ӧ�ٶȿ졢³����ǿ���ŵ㡣
�ο����ף�
[1] NONAMI K, KENDOUL F, SUZUKI S, et al. Autonomous flying robots: unmanned aerial vehicles and micro aerial vehicles[M]. Tokyo: Springer Science & Business Media, 2010: 3-40.
[2] GUENARD N, HAMEL T, MAHONY R. A practical visual servo control for an unmanned aerial vehicle[J]. IEEE Transactions on Robotics, 2008, 24(2): 331-340.
[3] KOMMA V R, JAIN P K, MEHTA N K. An approach for agent modeling in manufacturing on JADE(TM) reactive architecture[J]. International Journal of Advanced Manufacturing Technology, 2011, 52(9/10/11/12): 1079-1090.
[4] ZEGHLACHE S, SAIGAA D, KARA K, et al. Backstepping sliding mode controller improved with fuzzy logic: application to the quadrotor helicopter[J]. Archives of Control Sciences, 2012, 22(3): 315-342.
[5] MELLINGER D, MICHAEL N, KUMAR V. Trajectory generation and control for precise aggressive maneuvers with quadrotors[J]. International Journal of Robotics Research, 2012, 31(5): 664-674.
[6] MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]//Proceedings of International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011: 2520-2525.
[7] REYES V E, ENRIQUEZ C R, CAMACHO L S, et al. LQR control for a quadrotor using unit quaternions: modeling and simulation[C]//Proceedings of International Conference on Electronics, Communications and Computing. Cholula, Mexico: IEEE, 2013: 172-178.
[8] FALKENBERG O, WITT J, PILZ U, et al. Model identification and H�� attitude control for quadrotor MAV's[C]//Proceedings of International Conference on Intelligent Robotics and Applications. Montreal, Canada: Springer, 2012: 460-471.
[9] MADANI T, BENALLEGUE A. Backstepping control for a quadrotor helicopter[C]//Proceedings of International Conference on Intelligent Robots and Systems. Beijing, China: IEEE, 2006: 3255-3260.
[10] MATOUK D, GHEROUAT O, ABDESSEMED F, et al. Quadrotor position and attitude control via backstepping approach[C]//Proceedings of International Conference on Modelling, Identification and Control. Algiers, Algeria: IEEE, 2016: 73-79.
[11] LEE D, KIM H J, SASTRY S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter[J]. International Journal of Control Automation & Systems, 2009, 7(3): 419-428.
[12] BESNARD L, SHTESSEL Y B, LANDRUM B. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer[J]. Journal of the Franklin Institute, 2012, 349(2): 658-684.
[13] ZHANG Xu, XIAN Bin, ZHAO Bo, et al. Autonomous flight control of a nano quadrotor helicopter in a GPS-denied environment using on-board vision[J]. IEEE Transactions on Industrial Electronics, 2015, 62(10): 6392-6403.
[14] RAFFO G V, ORTEGA M G, RUBIO F R. Backstepping/nonlinear H�� control for path tracking of a quadrotor unmanned aerial vehicle[C]//Proceedings of American Control Conference. Seattle, USA: IEEE, 2008: 3356-3361.
[15] MOKHTAR K, ABDELLAH M, BENALLEGUE A, et al. Nonlinear H�� control of a quadrotor(UAV), using high order sliding mode disturbance estimator[J]. International Journal of Control, 2012, 85(12): 1-10.
[16] RAFFO G V, ORTEGA M G, RUBIO F R. An integral predictive/nonlinear H�� control structure for a quadrotor helicopter[J]. Automatica, 2010, 46(1): 29-39.
[17] ������. �Կ��ſ���������Ӧ��[J]. ���������, 1998, 13(1): 19-23.
HAN Jingqing. Active disturbance rejection controller and its applications[J]. Control and Decision, 1998, 13(1): 9-23.
[18] HAN Jingqing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(4): 900-906.
[19] GAO Zhiqiang. On the centrality of disturbance rejection in automatic control[J]. ISA Transactions, 2014, 53(4): 850-857.
[20] SUN Li, LI Donghai, HU Kangtao, et al. On tuning and practical implementation of active disturbance rejection controller:a case study from a regenerative heater in a 1000 mW power plant[J]. Industrial & Engineering Chemistry Research, 2016, 55(23): 6686-6695.
[21] WANG Chengwen, QUAN Long, ZHANG Shijie, et al. Reduced-order model based active disturbance rejection control of hydraulic servo system with singular value perturbation theory[J]. ISA Transactions, 2017, 67(Supplement C): 455-465.
[22] LONG Yi, DU Zhijiang, CONG Lin, et al. Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskeleton[J]. ISA Transactions, 2017, 67(Supplement C): 389-397.
[23] CHEN B S, CHANG Y C. Nonlinear mixed H2/H�� control for robust tracking design of robotic systems[J]. International Journal of Control, 1997, 67(6): 837-857.
(�༭ �²ӻ�)
�ո����ڣ�2018-07-10�������ڣ�2018-09-12
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61573199��61573197)(Projects(61573199, 61573197) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�����ǿ����ʿ�����ڣ���ʿ����ʦ����������Ԥ������������Ż����㡢�Կ��ſ��Ƶ��о���E-mail��chenzq@nankai.edu.cn
ժҪ��Ϊʵ��������ֱ�����Ĺ켣���ٿ��ƣ����������Կ����������H2/H����Ͽ������һ�ַ�����³�����Ʋ��ԡ������������ա�ŷ�����̽���������ֱ�����ķ�������ѧģ�ͣ������仮��Ϊ��ת�˶���ϵͳ��ƽ���˶���ϵͳ������ת�˶���ϵͳ�У�ѡȡ������H2/H����Ͽ���ʵ����̬�ǵ��ȶ����ƣ���ƽ���˶���ϵͳ�У����������Կ��ſ������λ��ϵͳ�ĸ��ٿ��ơ��о�����������ڿ��Dz�����ȷ���Ժͳ����ⲿ�Ŷ�������£�������Ŀ��Ʋ���³���Խ�ǿ�����нϺõĸ���Ч���Ϳ������ܡ�
