
DOI: 10.11817/j.issn.1672-7207.2017.03.015
����ˮƽ֧��TBM֧���ƽ�Э�������о�
�����⣬�����������
(�㽭��ѧ ���嶯�������ϵͳ�����ص�ʵ���ң��㽭 ���ݣ�310027)
ժ Ҫ��
��Ӳ�����������(TBM)��ѥ֧��ϵͳ���ƽ�ϵͳЭ���Ӷ����и��ߵĸ��ӵ�����Ӧ�ԣ����TBM֧���ƽ�Э������ϵͳ������TBM֧���ƽ�������ѧģ�ͣ�����ģ���Ƶ��ƽ���ѹ�����ѥ֧�Ÿ�ѹ�����������Ź�ϵ�����һ��TBM֧���ƽ�Э������Һѹϵͳ������AMESim����������Һѹϵͳ���ж�̬�������������ij���̵ض�ʵ���ƽ�ѹ����Ϊ���Ը�ϵͳ������Ч�Է������о������������ͬ�ƽ�λ���£���ѥ֧�Ÿ�ѹ����������ֵ���ƽ���ѹ�����Ƴ���������أ�ϵͳ�ij�ѥ֧�Ÿ�ѹ�������ܽϺõظ����������趨���߶����ƽ�ѹ����λ����Э�������������������������ֱ�Ϊ1.45%��0.05 MPa��С��ʵ�ʹ����е����������1.72%��������0.12 MPa���ɼ���������֧���ƽ�Э������ϵͳ��Ч��
�ؼ��ʣ�
����ˮƽ֧��Ӳ�������������֧���ƽ�Э����������ѧģ����Һѹϵͳ��
��ͼ����ţ�TH137.8 ���ױ�־�룺A ���±�ţ�1672-7207(2017)03-0666-09
Coordinated control of gripper and thrust system for single gripping TBM
RAO Yunyi, GONG Guofang, YANG Huayong
(State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China)
Abstract: In order to coordinate the gripper and thrust system of single gripping hard rock tunnel boring machine (TBM) and get higher complex geology adaptability, a gripper and thrust coordinated control system was designed. The mechanical model of TBM gripper and thrust was proposed, the theoretical optimal interrelation between gripper cylinder and thrust cylinder pressure was derived from it. A TBM hydraulic system coordinating gripper and thrust cylinder was designed, dynamic simulation analyses were performed with AMESim and the validity analysis was based on the thrust pressure spectrum of practical engineering. The results indicate that there is an approximate positive correlation between the theoretical optimal gripper cylinder pressure and thrust cylinder pressure. The gripper cylinder pressure curve determined by thrust cylinder pressure and displacement tracks the theoretical setting curve accurately, and its maximum relative error and mean square error are 1.45% and 0.05 MPa, which are superior to 1.72% and 0.12 MPa in the practical engineering. Therefore, the TBM gripper and thrust system are coordinated, and the new hydraulic system is effective.
Key words: single gripping TBM; coordinated control of gripper and thrust system; mechanical model; hydraulic system
ȫ����Ӳ�����������(hard rock tunnel boring machine��TBM)�ǻ����硢Һ����һ�廯�ĸ���������������ʩ����ҵϵͳ�����о���ٶȿ졢��ȫ�Ըߡ����ڻ������ۺ�Ч��ߵ��ŵ�[1-2]��TBM����ͬ�Ľṹ����ԭ�����Է�Ϊ����ʽ������ʽ������ʽ��ҡ��ʽ��[3]������ʽTBM��������ʯ�����ԽϺõ�����������ά�����㣬�۸�ϵ͵��ŵ㣻���е���ˮƽ֧�ų���ʽTBM�־߱��ṹ���������㣬����ʱ��̣����ܹ����ƽ���ʵ��������������̬�������ŵ㣬������ҹ����ù㷺����ʵ��ʩ���У�һ�㽫TBM�ij�ѥ֧�Ÿ�ѹ���趨Ϊ��ֵ�����ƽ����ͳ�ѥ֧����Ҳ������˹������ķ����������ٿ���TBM�ƽ�ϵͳ�ͳ�ѥ֧��ϵͳ���������ԣ��������е�TBM�����Ƶ�֧�������ƽ�����Э�����Ը��ӵ��ʵ���Ӧ�Խϲ������ɹ����¹ʣ�����Խ������Ҳ���ʱ����ѥ�ӵر�ѹ������ƻ�Χ�ҵ������ԣ���������������̮��[4-5]���ڽ�Ӳ�ز��о��ʱ����ѥ�ӵر�ѹ���㽫���³�ѥ�������ƽ������ͷ�Ť�ض����´�Ŀǰ����TBM���о���Ҫ�����ڵ��̵��ߵ���Ƽ��ֲ����Ż���ʩ���ľ������Ԥ��ȷ���[6-9]������TBM֧���ƽ���Һ����ϵͳ���о���Խ��١��������߽���TBM֧���ƽ���ѧģ�ͣ������������ѥ֧�Ÿ�ѹ�����ƽ���ѹ������������Ź�ϵ��ͬʱ��Ƴ�һ��TBM֧���ƽ�Э������Һѹϵͳ���ܿ���TBM��֧�������ƽ����ﵽ����ƥ�䣬����Ϲ���ʵ�����ݶԸ�ϵͳ���з�������о�����֤����Ч�ԡ�
1 TBM֧���ƽ���ѧģ��
����ˮƽ֧��TBM��һ��֧���ƽ��г�ͨ�����ѥ֧�Ż������ƽ�������ʵ�֡���ѥ֧�Ż����еij�ѥҺѹ���ƶ���ѥ��ѹ�Ž�Χѹ��ڣ�֧���������������ƽ��������ƽ�Һѹ��ѹ�ƶ����̾�������һ��֧���ƽ��г̡�Ϊ���о�����֧���ƽ��г���TBM��ѥ֧�������ƽ�����Э�����ƣ�����Ҫ̽����һ��ϵͳ���������£�TBM��ѥ֧�Ż������ƽ����������������Ĺ�ϵ����ͼ1��ʾ��TBM֧���ƽ�����������ѧ�����뽨ģ������ϵͳ���غ���ϵͳԼ�������������ɹ���ƽ����ϵ[10]��ͨ��ϵͳ����������ƽ�ⷽ�̼�������֧�������ƽ�����Ĺ�ϵʽ��
1.1 ֧���ƽ�������ѧģ��
TBM�ƽ�ǰ����ͨ����ѥ֧��Һѹ��������ѥ�Ž�Χ�ң����ƽ�Һѹ���ƶ������͵��̵ȹ̽Ӳ�����ǰ�˶�����Ť��Һѹ��֧���������ƽ�ʱ֧���ƽ������ܵ������ذ��������������������̴����ƽ�������ת�������ء������ܵ���Χ��ѹ����Ħ�����ȡ�Ϊ���ڶ�֧���ƽ�����������ѧ�������ɶԸû���������ģ�ͽ������¼���ѥ�Ž�Χ�Һ���ѥѥ����Χ�ҿ���һ�壬��Ϊ�̶��ˣ�TBMΪֱ�о��������������ƫ�����ã�������֧�Ż������������������̡������Ͱ��ܵ�����������֧�ż��ƽ�Һѹ������¸���������Һѹ����Ϊ�����ˣ�Χ�ҶԵ��̻��ܵ����÷�2���֣�һ�������������£�Χ�ҶԵ��̻��ܵ�֧������Ħ���������ڻ��ܵײ����ģ����Dz���������ʱ��Χ��Χѹ�Ի����������ѹ����Ħ�������ȷֲ��ڻ������ܣ��ɵ�ЧΪһ�������ڵ������ĵ��Ħ��������
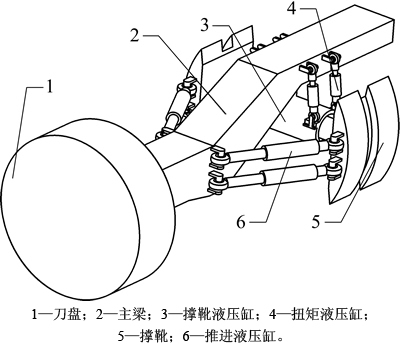
ͼ1 TBM֧���ƽ�����ʾ��ͼ
Fig. 1 Diagram of TBM gripper and thrust mechanisms
���TBM֧���ƽ����������������ͼ2��ʾ���Ե������ĵ�OΪԭ�㽨���ռ�����ϵO-xyz��(f0, m0)ΪΧ�ҶԵ��̵��ƽ������ͷ����أ�����������ʱΧ�ҶԵ��̻��ܵĵ�ЧĦ���������õ�ΪO����λ����ʸ��Ϊ-y����СΪFf2������������Χ�ҶԵ��̻��ܵ�֧������Ħ���������õ�ΪA�㣬��λ����ʸ���ֱ�Ϊz��-y����С�ֱ�ΪΪFN��Ff1�����̡������Ͱ��ܲ��ֵ����������õ�ֱ�ΪO��B��N����λ����ʸ����Ϊ-z����С�ֱ�ΪFg1��Fg2��Fg3����ѥ�ṩ�����ƽ�Һѹ���ƽ��������õ�ΪDi�����ƽ����ķ���λʸ��Ϊdi�����O���λ��ʸ��Ϊldi�����ƽ���ΪFDi����ѥ֧��Һѹ�����ѥ��¼������������õ�ΪR��S���������O���λ��ʸ��Ϊlr��ls����������xyz��������ֱ�ΪFRx��FRy��FRz��FSx��FSy��FSz��������ϵͳ��֧���ƽ���������������λ����ʸ��Ϊy����СΪFf3��
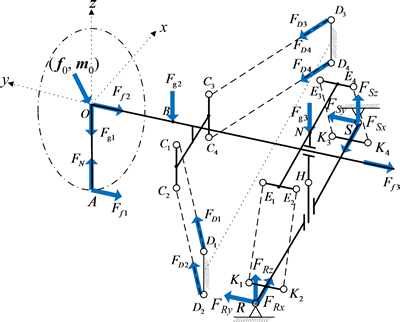
ͼ2 ֧���ƽ���������ʾ��ͼ
Fig. 2 Diagram of TBM gripper and thrust mechanical analysis
��֧���ƽ�������xyz�������ƽ�⣬�ɵã�
 (1)
(1)
��֧���ƽ�������O�������ƽ�⣬�ɵã�
 (2)
(2)
��ʽ(1)��ʽ(2)�ɼ������ѥ֧�Ÿ����ѥ��¼��������FRy��FRz��FSy��FSz���ƽ���FDi��Ĺ�ϵʽ��
 (3)
(3)
 (4)
(4)
����
 (5)
(5)
 (6)
(6)
1.2 ��ѥѥ����ѧģ��
�����ѥѥ��Ϊ������������������ͼ3��ʾ�����ܵ��ƽ�������-FD1d1��-FD2d2�����ѥҺѹ����¸���������СΪFRx��FRy��FRz����λ����ʸ���ֱ�Ϊx��-y��-z�����Χ�Ҹ���ѥ������֧����ΪFN1��Χ�Ҹ���ѥ��Ħ����ΪFf4����λ��������Ϊw��w��x��ֱ��w��z�ļн�Ϊ��w��������Χ�����ѥ��ĵ�Ч���Ħ������Ϊ�̡�
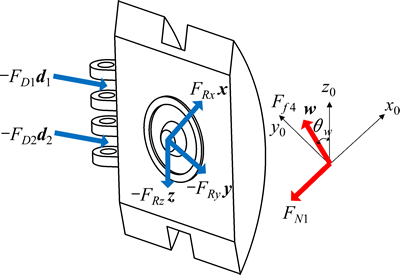
ͼ3 ��ѥѥ������ʾ��ͼ
Fig. 3 Diagram of TBM gripper mechanical analysis
������ѥѥ����xyz������ƽ�⣬�ɵã�
 (7)
(7)
�ֲ��Χ�Ҹ���ѥ������֧����FN1�����ѥ��Ħ����Ff4�������㣺
 (8)
(8)
��ʽ(7)��ʽ(8)���������ѥҺѹ�׳Ž���FRx���ƽ�Һѹ���ƽ���FDi��Ĺ�ϵʽ��
 (9)
(9)
 (10)
(10)
����TBM���ѥ�Ž���Χ�ҵ�λ����ɳ��ܵ�ѹ��Ϊpmax��ʵ�ʵ�λ������ܵ�ѹ��Ϊpr������ѥѥ������ͶӰ���ΪS����FRxӦ���㣺
 (11)
(11)
 (12)
(12)
��ʽ(9)��ʽ(11)Ϊ��һ���ƽ������³�ѥ�Ž�����Լ������������TBM��ѥ���Χ����ѹӦ������С����ʽ(12)��prȡ��Сֵ��Ϊ����Ŀ��[11]�����Ƶ�����ʽ(9)ȡ�Ⱥ�ʱ�ﵽ����Ŀ�꣬��ʱʽ(9)�еij�ѥ�Ž���FRx���ƽ�Һѹ���ƽ���FDi������������ƥ���ҳ�ѥҺѹ��ѹ��Ϊ�������š�
2 TBM֧���ƽ�Э������Һѹϵͳ
��TBMһ��֧���ƽ������г��У���ѥҺѹ�ĸ�ѹ�Ž�Χ�Ҳ�ں��ƽ�Һѹ�ĸ�ѹ�ƽ������ǹؼ��Ķ���������֧�����ƽ�Һѹϵͳ�������ԣ�����Ըùؼ���������Ƴ�һ�����͵�֧���ƽ�Э������Һѹϵͳ����֧���ƽ�����ԭ����ͼ4��ʾ��
����TBM�ƽ�Һѹ����������ԳƷֲ�����Һѹϵͳ��ͬ���ֽ�����TBM����ƽ�Һѹ���顣�ڸ�֧���ƽ�Э������Һѹϵͳ�У��ƽ�Һѹϵͳ�Ŀ��Ʒ�ʽΪ�������ٷ������������Эͬģʽ[12]����ѥ�Ž�Һѹϵͳ�Ŀ��Ʒ�ʽΪ������ѹ����һģʽ������ϵͳ�ɱ����á���ȫ�����������ٷ�����������������λ��ͨ��������������ѹ����Һ�ص�����������Һѹ����ɡ�λ�ƴ�����ʵʱ�����ƽ�Һѹ��λ�ƣ��ƽ�Һѹ����ѥ֧��Һѹ�״���ѹ��������ʵʱ�������Ӧ����·ѹ�������ɼ���λ���źź�2��ѹ���źž���A/Dת���������ػ���D/Aת��������ɵ�Э��������������ת��Ϊ3�����źţ���������ϵͳ�еı������ٷ��������������ͱ�����ѹ���ķ�о��������
���ʵ��TBM�ľ�����̣����ƽ���ѹ�����ƽ����ؾ������ƽ�������ѹ����Ҫ����������ѹ��ָ��������ʶ�ϵͳ�г�ѥ֧�Ÿ�ѹ�����ƽ���ѹ��Э�����ƿ���Ϊ�������ƽ���ѹ�������ֵ��ͬʱ���ĵ�֧���ƽ�Э��������Ҫ��Ը���TBM���ƽ�ϵͳ���ƽ���ѹ����λ��Э�����Ƴ�ѥ֧�Ÿ�ѹ����
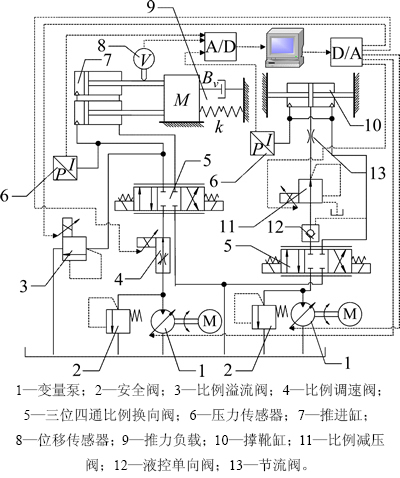
ͼ4 TBM֧���ƽ�Э������Һѹԭ����ͼ
Fig. 4 TBM gripper and thrust coordinated control hydraulic system
��TBM��ѥ��ѹ�Ž����Χ��ʱ����ѥ����Ϊ��ֹ״̬����˿ɽ��为��ģ�ͼ�Ϊ��ģ�͡�TBM��ѥ֧�Ÿ�����ģ�͵���ƽ�ⷽ�����£�
 (13)
(13)
ʽ�У�A1Ϊ�ƽ�Һѹ����ǻ�������pL1Ϊ�ƽ�Һѹ����ǻ��ѹ���ı�������F1Ϊ�������ƽ�Һѹ�������ϵ���Ӹ�������
���������ѧ����ʯ�Ŀ�������ϱ���ģ��[13]����TBM�ƽ��غ�ģ�ͼ�Ϊ���뵯������ģ�͡�����TBM�ƽ�������ģ�ͣ�����ƽ�ⷽ�����£�
 (14)
(14)
ʽ�У�A2Ϊ�ƽ�Һѹ����ǻ�������pL1Ϊ�ƽ�Һѹ����ǻ��ѹ���ı�����MΪ�����������˵�ȫ���ƶ���������������������xΪ�ƽ�Һѹ����Գ�ʼλ�õ�λ�ƣ�BvΪ���������ص��������ϵ����kΪ����ģ�͵��ɸնȣ���F2Ϊ�������ƽ�Һѹ�������ϵ���Ӹ�������
3 ����TBM����֧���ƽ�Э������ģ�ͼ���
���������������ڳ�19.8 km�������в��õĵ���ֱ��10.2 m ��TBMΪ��[14]������ṹ����������Բ���õ������ƽ��г̳�ʼλ�õ�Ci��Di��R��S�����꣬���1��ʾ��
��1 TBM֧���ƽ������ؼ��ṹ������
Table 1 Coordinates of key TBM gripper and thrust mechanisms points
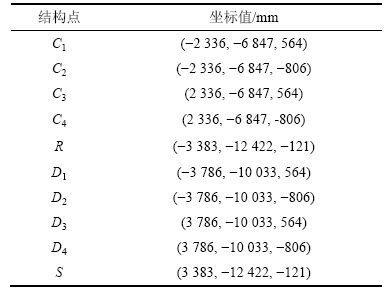
��ʵ��ʩ���У�ֱ�й����µ�TBM 2���ƽ�Һѹ���ƽ����趨Ϊ��ȣ���ΪFD������ʽ(9)����ɵã�
 (15)
(15)
���У�FRz����Ϊ������
 (16)
(16)
��������TBM���õ��ǵ��߳�ѥ˫�׳Ž�����ʽ�����Զ������ѥ��FRx=2A1pL1�������ƽ�Һѹ�ף�FD=A2pL2����ȡ֧�������ƽ�������ƥ�䣬��FN1=��Ff4������������Ǵ���ʽ(15)�ɵ�֧��Һѹ����������ѹ������ʽ��

 (17)
(17)
����m0>>F0����FRz��(-m0)/6.77���ٶ�ʽ(17)�����滻���ɵã�
 (18)
(18)
����
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
����TBM�ij�ѥҺѹ��ֱ��d1 = 810 mm���ƽ�Һѹ��ֱ��d2=500 mm���� A2/(2A1)=(d2/d1)2= 0.19���������������TBMʩ���ضε���ʯ����[15-17]���趨��ѥ��Χ�Ҳ�ڵĵ�Ч���Ħ������Ϊ��=0.3~0.4�����ʵ��ʩ��[15]�����赥���ƽ��г����ƽ�Һѹ�ij�ʼ�趨ѹ��Ϊ20 MPa������趨ѹ��Ϊ34.5 MPa�����̸�����תʱ�����Ť��Ϊ4 710 kN��m��������ʯ�����̵ķ�Ť��m0��4 710 kN��m����ͨ��ʽ(18)���Եõ�һ��λ�ơ�x�µij�ѥ֧�Ÿ�ѹ��pL1���ƽ���ѹ��pL2������������ֵ��ϵ��
ͼ5��ʾΪ��ȡ0.3ʱ���ƽ����ƽ�λ�ơ�x�ֱ�Ϊ0��600��1 200��1 800 mmʱ���ƽ�����֧�Ÿ�ѹ�������������ߡ���ͼ5��֪������xһ��ʱ���ƽ���ѹ��������Ӧ���������ų�ѥ֧�Ÿ�ѹ�����Ƴ���������ء���ͬ���ƽ�ѹ���£�����x��������Ž�ѹ����������ͬ�ġ�x�����£��Ž�ѹ���������м�С�����ơ�
ͼ6��ʾΪTBM�ƽ���ѹ��pL2����λ�ơ�x����֧�Ÿ�ѹ��pL1��Э�����ƽṹ��ͼ����PID����ǰ�����������ڣ�����ƽ�ѹ�������������Χ�ڵ�С����ʱ����ѥϵͳ�Ե���֧��ѹ�����������沨��������ʽ(17)�����������pL1��������pL2����x�ľ����ϵʽ��
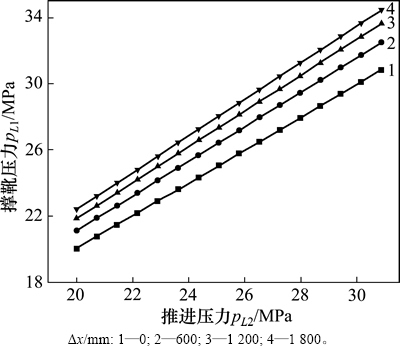
ͼ5 �ƽ���-֧�Ÿ�ѹ��������������
Fig. 5 Theoretical optimal curve of thrust and gripper cylinder pressure

 (23)
(23)
ʽ�У� Ϊ��ѥ֧�Ÿ�ѹ���������趨ֵ��
Ϊ��ѥ֧�Ÿ�ѹ���������趨ֵ�� Ϊ�ƽ���ѹ���������趨ֵ��
Ϊ�ƽ���ѹ���������趨ֵ��
4 ϵͳ��Ч�Է������
���ͼ4�TBM֧���ƽ�ҺѹϵͳAMESimҺѹ����ģ�ͣ���ͼ7��ʾ��ͼ������1Ϊ���HCD����ҺѹԪ�����������ٷ���еģ�ͣ�����2Ϊ������ѹ���Ļ�еģ�͡��������TBM���Ͳ���������������ʩ�����ݣ��趨ϵͳ�IJ��ַ������������2��
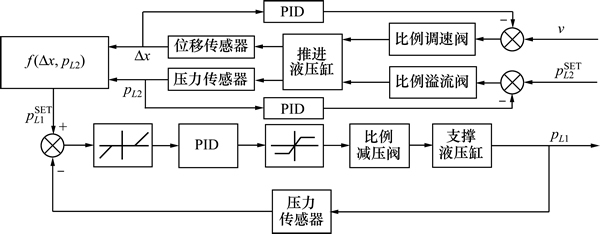
ͼ6 �ƽ�֧��Э�����ƽṹͼ
Fig. 6 Control block diagram of gripper and thrust coordinated system
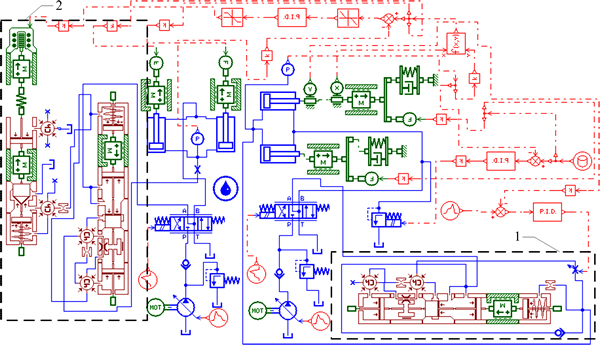
ͼ7 ֧���ƽ�ҺѹϵͳAMESim����ģ��ͼ
Fig. 7 Gripper and thrust coordinated hydraulic system simulated model in AMESim
��2 ϵͳ������Ҫ�趨����
Table 2 Main setting parameters of simulated system

�����������ƽ�Һѹϵͳ�����֧��Һѹϵͳ����ֱ���з��档�趨�ƽ��׳�ʼ�ƽ��ٶ�Ϊ0.25 mm/s��9 s���Ϊ0.5 mm/s���ƽ��׳�ʼ�ƽ�ѹ��Ϊ16 MPa���⸺����Ϊ3 140 kN��6 s���Ϊ26 MPa���⸺����Ϊ5 102 kN���趨TBM��ѥ֧�Ÿij�ʼ�Ž�ѹ��Ϊ20 MPa��6 s �ϵ�Ϊ31.5 MPa��12 s�µ�Ϊ27 MPa��ͼ8(a)��ʾΪ�ƽ����ƽ�ѹ�����ٶȷ������ߡ���ͼ8(a)��֪�������ƽ�ѹ�����ƽ��ٶ�ʱ�����Ǿ����ڶ��ݵ���Ϊ�趨ֵ��ͼ8(b)��ʾΪ��ѥ֧�Ÿ׳Ž�ѹ���ķ������ߡ���ͼ8(b)��֪�����ڳŽ�ѹ��ʱ���Ž�ѹ�����ڶ��ݵ���Ϊ�趨ֵ�����Ͽ�֪�����������ƽ�Һѹϵͳģ�͵��ƽ�ѹ�����ٶȾ��ɵ��أ�֧��Һѹϵͳģ�͵ijŽ�ѹ���ɵ��ء�
����������֧���ƽ�Һѹϵͳ�������Э�����Ʒ��档�趨�ƽ��׳�ʼ�ƽ�ѹ��Ϊ20 MPa���⸺����Ϊ3 927 kN��600 s���Ϊ30 MPa���⸺����Ϊ5 890 kN��1 200 s���Ϊ25 MPa���⸺����Ϊ4 909 kN����ʼ�ƽ��ٶ��趨Ϊ0.5 mm/s��600 s���µ�ԼΪ0.1 mm/s��1 200 s��ָ�Ϊ0.5 mm/s��ͼ9(a)��ʾΪ�ƽ����ƽ�ѹ��λ�Ʒ������ߣ���600 sʱ���ƽ�λ������б�ʼ�С�Ƕ�Ӧ���ƽ�ѹ��ͻȻ����Ϊ30 MPa���ƽ��ٶ���֮�����ͼ9(b)��ʾΪ���ۼ������趨�ij�ѥ֧�Ÿ׳Ž�ѹ��������Э�����Ʒ������ߣ��Ž�ѹ�������趨��������ͼ9(a)�е��ƽ�ѹ��pL2��λ�ơ�x����f(��x, pL2)�������ã������߳�б���ϱ仯�������������ƽ���λ�ơ�x�ڲ�������ͼ9(b)�гŽ�ѹ��Э�����Ʒ������߿��ԽϺõ��������趨���ߵı仯���Ž�ѹ��Э�����Ʒ���ֵ�������趨ֵ������������Ϊ0.4%����������ʽ�Ϊ0.14 MPa��
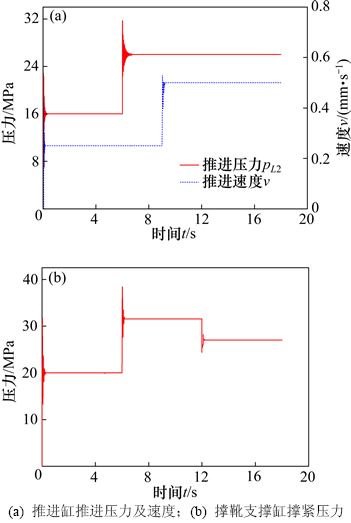
ͼ8 �ƽ�֧�ŵ���Һѹϵͳ��������
Fig. 8 Simulation of gripper and thrust individual hydraulic system
��TBMʵ��ʩ���ɼ���������ѡȡһ����Ϊ�������ݣ����е��ƽ�ѹ����ͬ�ضζ�Ӧ���ƽ��ٶȼ���ѥ֧�Ÿ׳Ž�ѹ����ͼ10(a)��ʾ����������������ݶ�����ķ���ģ�ͽ���֧���ƽ�Э�����Ʒ��棬������������ͼ10(b)~(d)��ʾ����֪���õضε��ƽ�ѹ�������Ϊ41.4 %������Ϊ18.58 MPa�����ƽ��ٶȵ�ƽ��ֵԼΪ0.5 mm/s (1.8 m/h)�������Ϊ83.2 %������Ϊ1.9��10-4 m/s����Ž�ѹ���趨Ϊ��ֵ��ԼΪ30 MPa���������Ϊ1.72 %������Ϊ0.12 MPa��ͼ10(b)�У��ƽ����ƽ�ѹ���������߿ɽϺõظ������趨���ƽ�ѹ���ף�����ɵ����ǵ����������Ϊ1.4%���������Ϊ0.10 MPa��ԶС��ʵ�ʹ������ƽ�ѹ���IJ���ֵ��ͼ10(c)�У��ƽ����ƽ��ٶ������趨���ٶ�0.5 mm/s�������ƽ�ѹ��������Խ��ʱ�ƽ��ٶȵ�����Խ����ɵ÷����ƽ��ٶȾ�ֵԼΪ0.5 mm/s�����������Ϊ24%����Ϊʵ�ʹ����ƽ��ٶȵ�1/4�������ƽ��ٶȵľ������Ϊ2.2��10-5 m/s��ԶС��ʵ�ʹ����ƽ��ٶȵľ�����ͼ10(d)��, Э������֧�Ÿ�ѹ�����������������趨�����Ǻ϶Ƚϸߣ��������������������ֱ�Ϊ1.45%��0.05 MPa��С��ʵ�ʹ������趨Ϊ��ֵ��֧�Ÿ�ѹ�������������1.72%��������0.12 MPa�����ϣ���������֧���ƽ�Э������Һѹϵͳ����Ч�ġ�
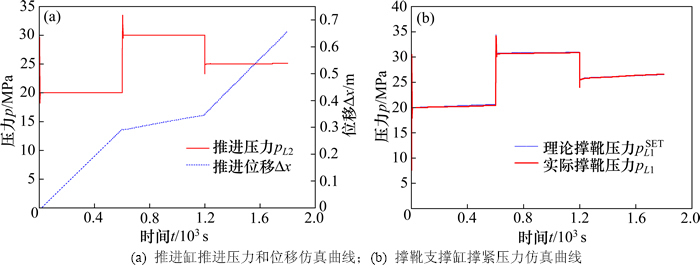
ͼ9 �ƽ�֧������ҺѹϵͳЭ�����Ʒ�������
Fig. 9 Simulation of gripper and thrust coordinated control hydraulic system
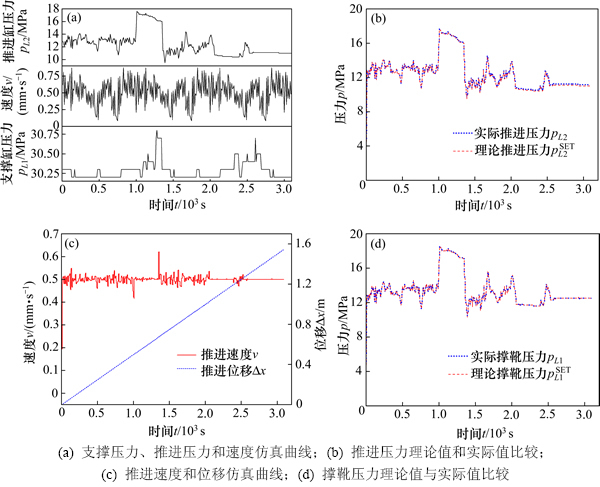
ͼ10 ���ڹ������ݵ��ƽ�֧��Э�����Ʒ�������
Fig. 10 Simulation of gripper and thrust coordinated control hydraulic system based on engineering data
5 ����
1) �������ŵ�TBM��ѥ֧�Ÿ�ѹ���ɽ������ƽ���ѹ����λ��ȷ��������ͬ�ƽ���λ���£���ѥ֧�Ÿ�ѹ����������ֵ���ƽ���ѹ�����Ƴ���������أ��ƽ���ѹ������ʱ����ѥ֧�Ÿ�ѹ����������ֵ���ƽ���λ������أ��ҵ��ƽ�λ�������µij�ѥ֧�Ÿ�ѹ�������м�С�����ơ�
2) ��������TBM֧���ƽ�Э������Һѹϵͳ��Ч�����ƽ�ѹ���ɸ������趨��ѹ���ף��ƽ��ٶȿ���ѹ��ͻ��ʱС���Ȳ������ȶ������趨���ٶ�ֵ������ͨ���ƽ���ѹ�����ٶ������Ƶij�ѥ֧�Ÿ�ѹ�����������趨ֵ�����������;������ֱ�Ϊ1.45%��0.05 MPa��С��ʵ�ʹ�����֧�Ÿ�ѹ�������������1.72%�;������0.12 MPa��
3) ��һ�����о�TBM����ת�ؼ�ת�ٺ��ƽ���ѹ�����ٶȵȶ����ع�ͬЭ�����Ƴ�ѥ����Χ�Ҽ�Ľӵر�ѹ���Զ���Ӧ�ز���ʻ�����ʹ�ñ��ĵ�֧���ƽ�Э������ģ�������Ҹ�����ʵ�ʹ������塣
�ο����ף�
[1] ZHANG Kaizhi, YU Haidong, LIU Zhongpo, et al. Dynamic characteristic analysis of TBM tunneling in mixed-face conditions[J]. Simulation Modelling Practice and Theory, 2010, (18): 1019-1031.
[2] ������, ������. ȫ������ʯ���������: ϵͳԭ���뼯�ɼ���[M]. �人: ���пƼ���ѧ������, 2010: 2-3.
DU Yanliang, DU Lijie. Full face hard rock tunnel boring machine: system principles and integrated design[M]. Wuhan: Huazhong University of Science and Technology Press, 2010: 2-3.
[3] FARROKH E, ROSTAMI J. Effect of adverse geological condition on TBM operation in Ghomroud tunnel conveyance project[J]. Tunneling and Underground Space Technology, 2009, 24(4): 436-446.
[4] ����, ��Ȫ��, ����, ��. ������ز�TBMΧ����ѧ��Ϊ�����о�[J]. ú̿ѧ��, 2014, 39(10): 1977-1986.
HUANG Xing, LIU Quansheng, LIU Bin, et al. Experimental research on the mechanical behavior of deep soft surrounding rock tunneling by TBM[J]. Journal of China Coal Society, 2014, 39(10): 1977-1986.
[5] ������, �����, ������, ��. TBM���������չ���йع��̵�����������ͶԲ�[J]. ���̵���ѧ��, 2005, 13(3): 389-397.
YIN Juntao, SHANG Yanjun, FU Bingjun, et al. Development of TBM-excavation technology and analyses & countermeasures of related engineering geological problems[J]. Journal of Engineering Geology, 2005, 13(3): 389-397.
[6] ����, κ��Ӣ, �ž�. ȫ������ʯ������������õ��Ż�����[J]. ������ͨ��ѧѧ��, 2013, 47(9): 100-105.
GENG Qi, WEI Zhengying, DU Jun. Cutter layout optimization method of full-face rock tunnel boring machine[J]. Journal of Xi��an Jiaotong University, 2013, 47(9): 100-105.
[7] LIU Jie, CAO Ping, JIANG Zhe, et al. Numerical simulation on effects of embedded crack on rock fragmentation by a tunnel boring machine cutter[J]. Journal of Central South University, 2014, 21(8): 3302-3308.
[8] ̷��, ���ξ�, ������, ��. 2������˳����TBM�������һ�������ֵ�о�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2012, 43(3): 940-946.
TAN Qing, XU Zijun, XIA Yimin, et al. Numerical study on mode of breaking rock by TBM cutter in two cutting orders[J]. Journal of Central South University (Science and Technology), 2012, 43(3): 940-946.
[9] GAO Li, LI Xibing. Utilizing partial least square and support vector machine for TBM penetration rate prediction in hard rock conditions[J]. Journal of Central South University, 2015, 22(1): 290-295.
[10] ������. �ܹ������̬���ƹؼ������о�[D]. �㽭: �㽭��ѧ��е����ѧԺ, 2014: 64-69.
WANG Lintao. The key technology research on attitude control of thrust system for shield tunneling machine[D]. Zhejiang: Zhejiang University. School of Mechanical Engineering, 2014: 64-69.
[11] ����һ, ����, ������, ��. �罬��е��ʱ���������������Ź켣�滮[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(1): 114-121.
CAO Zhongyi, WANG He, WU Wanrong, et al. Time-jerk optimal trajectory planning of shotcrete manipulators[J]. Journal of Central South University (Science and Technology), 2013, 44(1): 114-121.
[12] ������, ������, ���, ��. �ܹ������ģ������̨Һѹϵͳ���ɼ��������[J]. ũҵ��еѧ��, 2005, 36(12): 102-105.
HU Gongliang, GONG Guofang, YANG Huayong, et al. Hydraulic system integration and experimental analysis of shield tunneling machine for simulator test rig[J]. Transactions of the Chinese Society of Agricultural Machinery, 2005, 36(12): 102-105.
[13] ������. ������ѧ[M]. ��ɳ: ���ϴ�ѧ������, 2004: 85-86.
WANG Wenxing. Rock mechanics[M]. Changsha: Central South University Press, 2004: 85-86.
[14] ������, ������, ������. ״̬��⼼��������������ϵ�Ӧ��[J]. �й��豸����, 2013(11): 56-57.
ZUO Qinglin, MA Huaixiang, XU Mingxin. The application of state inspection technology in the tunnel boring machine[J]. China Plant Engineering, 2013(11): 56-57.
[15] ��ս��. �����볤������TBM���ι���ĥ�����[J]. ������е��, 2014(1): 79-81.
ZHAO Zhanxin. Wear analysis of TBM disc cutter in West Qinling super long tunnel[J]. Construction Mechanization, 2014(1): 79-81.
[16] ����÷, �����. �������ʯ���澲Ħ��ϵ��Ӱ�������о�[J]. ������ѧ, 2013, 34(3): 674-678.
HAN Wenmei, KANG Tianhe. Experimental study of influence of asperity on static friction coefficient for polished rock surface[J]. Rock and Soil Mechanics, 2013, 34(3): 674-678.
[17] ������, �, ��ΰ, ��. ��ͬTBM ֧�Žṹ��ʽ�µ�Χ���ȶ��Է���[J]. ������ѧѧ��(��Ȼ��ѧ��), 2014, 35(11): 1602-1606.
HUO Junzhou, YANG Jing, SUN Wei, et al. Stability analysis of surrounding rock under different TBM supporting forms[J]. Journal of Northeastern University (Natural Science), 2014, 35(11): 1602-1606.
(�༭ �Կ�)
�ո����ڣ�2016-03-13�������ڣ�2016-05-17
������Ŀ(Foundation item)�����Ҹ����о���չ�ƻ�(863�ƻ�)��Ŀ(2012AA041803)�������ص�����о���չ�ƻ�(973�ƻ�)��Ŀ(2013CB035404) ((Project(2012AA041803) supported by the National High Research Development Program (863 Program) of China; Project(2013CB035404) supported by the National Basic Research Development Program (973 Program) of China)
ͨ�����ߣ������������ڣ����¾��װ����Һ���Ƽ����о���E-mail: gfgong@zju.edu.cn
ժҪ��Ϊʹ����ˮƽ֧��Ӳ�����������(TBM)��ѥ֧��ϵͳ���ƽ�ϵͳЭ���Ӷ����и��ߵĸ��ӵ�����Ӧ�ԣ����TBM֧���ƽ�Э������ϵͳ������TBM֧���ƽ�������ѧģ�ͣ�����ģ���Ƶ��ƽ���ѹ�����ѥ֧�Ÿ�ѹ�����������Ź�ϵ�����һ��TBM֧���ƽ�Э������Һѹϵͳ������AMESim����������Һѹϵͳ���ж�̬�������������ij���̵ض�ʵ���ƽ�ѹ����Ϊ���Ը�ϵͳ������Ч�Է������о������������ͬ�ƽ�λ���£���ѥ֧�Ÿ�ѹ����������ֵ���ƽ���ѹ�����Ƴ���������أ�ϵͳ�ij�ѥ֧�Ÿ�ѹ�������ܽϺõظ����������趨���߶����ƽ�ѹ����λ����Э�������������������������ֱ�Ϊ1.45%��0.05 MPa��С��ʵ�ʹ����е����������1.72%��������0.12 MPa���ɼ���������֧���ƽ�Э������ϵͳ��Ч��
[2] ������, ������. ȫ������ʯ���������: ϵͳԭ���뼯�ɼ���[M]. �人: ���пƼ���ѧ������, 2010: 2-3.
[4] ����, ��Ȫ��, ����, ��. ������ز�TBMΧ����ѧ��Ϊ�����о�[J]. ú̿ѧ��, 2014, 39(10): 1977-1986.
[6] ����, κ��Ӣ, �ž�. ȫ������ʯ������������õ��Ż�����[J]. ������ͨ��ѧѧ��, 2013, 47(9): 100-105.
[10] ������. �ܹ������̬���ƹؼ������о�[D]. �㽭: �㽭��ѧ��е����ѧԺ, 2014: 64-69.
[12] ������, ������, ���, ��. �ܹ������ģ������̨Һѹϵͳ���ɼ��������[J]. ũҵ��еѧ��, 2005, 36(12): 102-105.
[13] ������. ������ѧ[M]. ��ɳ: ���ϴ�ѧ������, 2004: 85-86.
[14] ������, ������, ������. ״̬��⼼��������������ϵ�Ӧ��[J]. �й��豸����, 2013(11): 56-57.
[15] ��ս��. �����볤������TBM���ι���ĥ�����[J]. ������е��, 2014(1): 79-81.
[16] ����÷, �����. �������ʯ���澲Ħ��ϵ��Ӱ�������о�[J]. ������ѧ, 2013, 34(3): 674-678.
