
����ۺ�����������ϵͳ��ʶ���˶�����
���㣬���潭��������
(�ϻ���ѧ ��е����ѧԺ������ ������421001)
ժ Ҫ��
�������������ԡ��͵�ѹ�����ҿ��ڿ�����������ʹ�õ��ŵ㣬���õ���ۺ�������������������������ʵ��ϵͳ�����˶�λ�ƽ��в��������п����о������ȣ�Ϊ�˽�������ۺ�������������ϵͳ���ݺ���ģ�ͣ��ֱ������С�������߱�ʶ�����������߱�ʶ������������������ȷ�Ķ�����ѧģ�͡���Σ�����ϵͳ��ʶģ�ͽ���������ϵͳ��ģ�ͣ����Կ�����ģǰ�����ƽ����о�����������ģǰ��PID���Ʒ��������������о�ȷ�˶����ƣ����봫ͳPID���ƵĿ������ܽ��бȽϡ�ʵ������������ģǰ��PID���ƾ��кܸߵĿ��ƾ��Ⱥ�³���ԡ�
�ؼ��ʣ�
����ۺ�����������ģ�ͱ�ʶ����ģ�����˶�������³������
��ͼ����ţ�TH165 ���ױ�־�룺A ���±�ţ�1672-7207(2014)04-1085-06
Model identification and motion control for conducting polymer actuators
YANG Yi, WANG Xiangjiang, ZENG Qingsheng
(School of Mechanical Engineering, University of South China, Hengyang 421001, China)
Abstract: Conducting polymer can be used to manufacture bending actuators due to their biocompatibility, requiring low actuation voltages and ability to operate in air or liquid media, and an experimental system was established for its movement displacement measurement and control research.Firstly, in order to establish the conducting polymer actuators control system��s transfer function model, a least squares off-line identification and neural network on-line identification method were employed to set up accurate second order mathematical model.Secondly, based on the system model, the inverse model was proposed,and open-loop inverse model feed-forward control were studied. Finally, the feed-forward controller with a PID was used to precision motion control ,and its command following performance was compared with that of traditional PID control.The experimental results show that the inverse model feed-forward controller with a PID has high accuracy and robustness.
Key words: conducting polymer actuators; model identification; inverse model; motion control; robustness
����ۺ�����һ�����˵ĵ��¾ۺ���(Ҳ���˹�����)���������������ʹ����������ܲ��ϣ�������������˺�����ҽѧ�豸���й�����Ӧ��ǰ��[1-6]��������(PPy)�;۱�����2����õĵ���ۺ������ۺ�������Һ�Ӵ���������ѹ�����»ᷢ��������Ӧ�������������У������ӽ�����������뿪����ۺ���Ա��ֵ���ƽ�⣬�ڸ���ѹ�����»ᷢ����������Ӧ�෴�Ļ�ԭ��Ӧ��������Ǩ�Ƶĵ���ۺ�����������Ӧ�����»ᷢ��������ͣ��ڻ�ԭ��Ӧ�����»ᷢ�����������������Ǩ�Ƶĵ���ۺ�������ȫ�෴����ͬ���õĵ���ۺ�����������˫�������͡���������͡�ֱ���͡������������������������м��Ϊ�Ǿ������϶�ľ�ƫ������ϩ(PVDF)�㣬�������Ǿ������ۺ���Ļ�����ϣ������ǵ��Һ��������������������Ϊ�������㡣��������������ϵ�ѹʱ��������������������ԭ���������ľ����������ո����Ӷ����ͣ�����ԭ�ľ��������ͷŸ����Ӷ����������յ�������������������ۺ���������ֻ��Ҫ�ܵ͵�������ѹ(2 V����)���Ϳɲ����൱���Ӧ����Ӧ�����������ͬʱ��������С�����������Ժõ��ŵ㣬�ɹ㷺Ӧ���ڻ����˺�����ҽѧ����������������ϵͳ������ϵͳ������ҽѧ�豸[7-9]�������������ľ�̬�Ͷ�̬��Ϊ������ȷ����ѧģ�Ͷ��������Ŀ������о����Ż���ƺͿ��ƶ���ʮ�����õ�[10-12]����ģ�͵ľ��ȡ���Ӧ�Ժͻ�����Ч��ѧģ�Ϳ����������˶��Ŀ��Ʒ������д���һ���о�[13-15] ���ڴˣ���������ͨ������3��Ĥ��������������ʵ��װ�ã��������ߺ����߱�ʶ���������µ�ϵͳģ����ʵ�ֶ����������ƣ���ͨ�����ߺ����߱�ʶ����֤��ģ�ͱ�ʶ����Ч�ԡ���ư���������ģǰ�����ơ�PID���ƺ���ģǰ��PID���Ƶȶ��ַ����Ա�ʶģ�ͽ��п��ƣ�ʵ����֤����ģǰ��PID���������ṩȷ���˶����ƾ��ȡ�
1 ʵ��װ��
ͼ1��ʾΪ�����;ۺ����������Ľṹ������3����Ҫ����ɣ�2��������(PPy)���1���ɴ�����Һ��PVDF�в㡣PPy�������Һ�������н��е�⣬PVDF������ƺܱ��Ľ�㣬����ߵ����ԡ���������������ij��ȺͿ��ȴӴ��Ľṹ�м��еõ������ָ��Ͻṹ���ֳ���˫�����������ļ������˶�������λ������ͨ���н��ľۺ���(PPy)���缫ʱ���ۺ��������������绯ѧ��Ӧ�����䶥�����������е�˶���
ͼ2��ʾΪģ�ͱ�ʶ��ϵͳ���Ƶ�ʵ��װ�á�����MATLAB��ʵʱ������RTW��Ӳ���ڻ�·�н���ʵʱ���ƣ�ѡ�õĹ�����ʽΪ������Real-time windows target������ͨ��Ŀ�����ӵķ�ʽ��Simulink��ϵ��һ�𣬰��յ�����ʵʱ�ں˷�ʽ�����ⲿӲ���豸�����ϵͳʵʱ���ơ�

ͼ1 ����ۺ����������ļ�����״
Fig. 1 Geometry of conducting polymer actuator
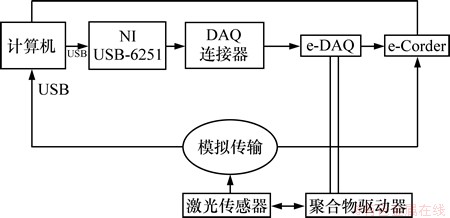
ͼ2 ʵ��װ��ʾ��ͼ
Fig. 2 Schematic representation of experimental setup
2 ģ�ͱ�ʶ
Ϊ�˽����������ı�ʶģ�ͣ�ͨ��ʵ��õ�ϵͳģ�Ͳ�����ʵ��������ģ�ͱ�ʶ��ϵͳ���Ƶ���1����Լ5 mm����Լ2 mm��PPy�������������ѹ�ź�u(t)��u(t)=2sin(��t)��������y(t)�ɼ������������ϵͳ����Ϊ1�����䣬ϵͳģ�Ͳ���ͨ�������ѹu(t)�����y(t)ȷ����
2.1 ���߱�ʶ
��������ɢϵͳ�Ķ���ѧ���̿��ɶ���ʽ��ʾ��
 (1)
(1)
���� ��
��
 ��ai��bi�ֱ�Ϊ����ϵͳ������z-1Ϊ�����λ������ţ�z-1y(t)=y(t-1)��
��ai��bi�ֱ�Ϊ����ϵͳ������z-1Ϊ�����λ������ţ�z-1y(t)=y(t-1)��
������[9]��֪�������ɽ���Ϊ����ϵͳ��������С���˷���ȷ��ģ�Ͳ�������������������Ϊ
 (2)
(2)
��������Ϊ
 (3)
(3)
ʽ(1)���Ը�д��
 (4)
(4)
����
 ��
��
ϵͳ��������С���˹��Ʀ�Ϊ
 (5)
(5)
��ͼ2��ʾ��ϵͳ�У�����u(t)=2sin(��t)���ɼ���λ�ƴ����������õ����y(t)����Simulink���������������м�¼�������ʱ���趨Ϊ0.002 s�����������������ʽ(5)��д�ij����У��õ���ɢ���ݺ����Ķ���ģ��Ϊ
 (6)
(6)
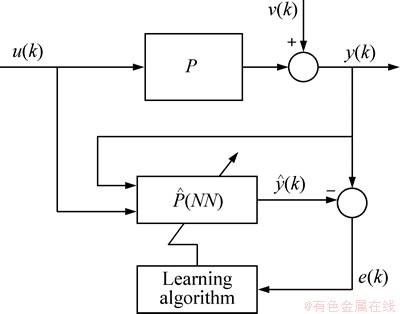
ͼ3��ʾΪ��ʶ����ʾ��ͼ������P��ʾ��������v(t)Ϊ�����źš�ͼ4��ʾΪ������ʵ�������ģ��Ԥ������Լ�������Ƚϡ���ͼ4���Կ���������������ź�y(t)�ͱ�ʶϵͳ����ź�yG(t)֮�����e(t)�dz�С��˵��ʽ(6)����ʾ�Ķ���ģ����Ч��
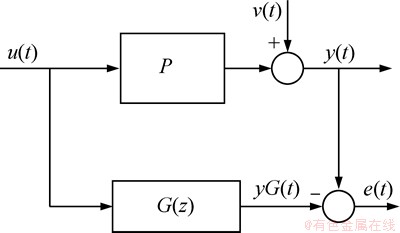
ͼ3 ģ�ͱ�ʶ����ʾ��ͼ
Fig. 3 Schematic of model validation procedure
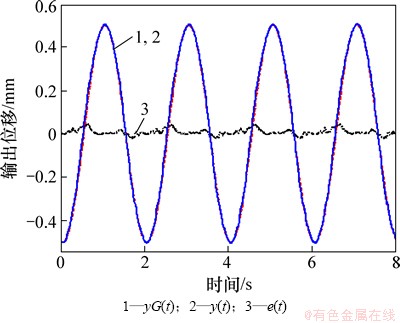
ͼ4 ������ʵ�������ģ��Ԥ������Լ�������Ƚ�
Fig. 4 Comparison of real actuator output and output predicted by model and associated modeling error
2.2 ���߱�ʶ
Ϊ�˽�һ����֤ʽ(6)��ȷ�ԣ������������ʶ����ʶ������ͼ5��ʾ��ʽ(1)����д��
 (7)
(7)
ͼ5 ���������߱�ʶ����ʾ��ͼ
Fig. 5 Schematic of neural network identification method
����ϵͳ����ai��bi������Ϊ�������Ȩֵwi���������������������� Ϊ
Ϊ
 (8)
(8)
ʽ(4)���Ա�ʾΪ
 (9)
(9)
�������ѵ������Ϊ
 (10)
(10)
����

 (11)
(11)
 (12)
(12)
 ��0������2 (13)
��0������2 (13)
ciΪȨ�����ӣ�0��ci��1��ci=��i��0���̣�1��
ʹ���������߱�ʶ����ģ���Ʋ�����Ϊ���������߱�ʶ��Ȩϵ���ij�ʼֵ���ɼ������߱�ʶ�ļ���ʱ�䡣����ʽ(9)��(10)���õ����������������ʶģ�͡���ͼ2��ʾϵͳ�У�����u(t)=2sin(��t)���ɼ���λ�ƴ����������õ�λ�����y(t)����Simulink�й����������ʶģ�ͣ�������ʵ�ֲ�����ʶ��
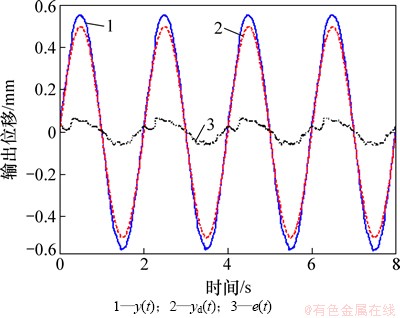
ͼ6��ʾΪ��������ģ�Ͳ���������������������������ڳ�����˵��ϵͳ�������㷨��ȷ����ϵͳ�Ķ����������ԡ����⣬���������Χ����1���̶��������²�����˵�����ߵ����Dz��Ͻ��еģ�ͬʱҲ˵��ϵͳ����ȫ��һ��������ϵͳ�������ŷ����Ժ�������š����ǣ���Ҫ�Ȳ����ر��ʱ����ȫ���Խ�ϵͳ��Ϊ������ϵͳ��ͼ7��ʾΪ���߱�ʶģ�����y1(t)��������ʵ�ʲ��������y(t)�Լ�������e(t)����Ϊ���������ߵ���ʹ������С�����ԣ�����y(t)��y1(t)�����ص���

ͼ6 ģ�Ͳ�����������
Fig. 6 Convergence of model parameters
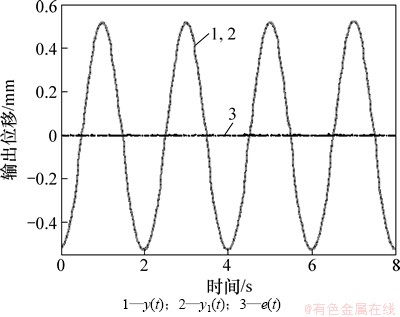
ͼ7 ������ʵ����������߱�ʶģ��Ԥ������Լ�������Ƚ�
Fig. 7 Comparison of real actuator output and output predicted by model and associated modeling error from on-line identification
3 ����ϵͳ����ƺ�ִ��
�������߱�ʶ�����õ���ģ�ͣ�����3�����Ʒ�������ģ�Ϳ��ơ���ģǰ��PID���ƺ�PID���ơ���ģ�Ϳ�����һ����ȫ�Ŀ�������ϵͳ������Ҫ�κη������ݵĿ�������ʽ(5)��ʾ��ɢ���ݺ���������С��λϵͳ������㲻��zƽ��ĵ�λԲ���棬��ˣ����ݺ����ĵ����Dz��ȶ��ģ���ʽ(5)����ֱ������������ģ�Ϳ���ϵͳ����Ҫ������ģ��G-1(z)����ģ���ͺ�������������ͨ������ģ��G1(z)�����ź���ģ��G2(z)�������ģ�͡�����ģ��Ϊ
 (14)
(14)
���ź���ģ��Ϊ
 (15)
(15)
���У���Ϊ���ڵ���1�����������ź���ģ���Dz��ȶ��ģ���Ϊ���ļ��㲻��zƽ�浥λԲ���棬G2(z)������չΪ
 (16)
(16)
����|b0|��|b1|����֪ʽ(16)�ж���ʽϵ��ri�dz�С���ɺ��Բ��ƣ���ˣ��õ��������������Ľ�����ģ��Ϊ
 (17)
(17)
ͼ8��ʾΪ��ģ�Ϳ���ϵͳʾ��ͼ�����Ϊ
 (18)
(18)
��ͼ2��ʾϵͳ�У�����yd(t)=0.5sin(��t)�������������Simulink�й�����ģ��G-1(z)��Ϊ��������ǰ����������ͼ9��ʾΪ��������ʵ���������������������e(t)��
Ϊ�˱��ڱȽϣ�ʽ(19)��������ɢPID����������ͼ10��ʾ��
 (19)
(19)
����
 (20)
(20)
��ͼ2��ʾϵͳ�У���Simulink������ģ�鹹����ɢPID��������ͨ���������飬PID��������������ϵ��������ϵ������ϵ���ֱ�ѡ��Ϊkp=250��ki=30��kd=30��ͼ11��ʾΪPID�����������������ıȽϽ��������PID��������³�����Ʒ��������켣�������DZȽϴ�

ͼ8 ��ģ�Ϳ�����ʾ��ͼ
Fig. 8 Schematic of inversion-based feedforward controller
ͼ9 ������ʵ���������ģ�Ϳ���ϵͳ��������Ƚ��Լ��������
Fig. 9 Comparison of real actuator output and desired output under inversion-based feedforward controller and associated tracking error

ͼ10 PID���Ʒ���ʾ��ͼ
Fig. 10 Schematic of PID control strategy

ͼ11 ������ʵ�������PID����ϵͳ��������Ƚ��Լ��������
Fig. 11 Comparison of real actuator output and desired output under PID controller and associated tracking error
���һ����ģǰ��PID���Ʒ��������ϵͳ��³���ԣ��Ա���õ���Ӧ�����������仯�Ͳ��������仯����ԭ����ͼ12��ʾ��
�����������Ϊ
 (21)
(21)

ͼ12 ��ģǰ��PID������ʾ��ͼ
Fig. 12 Schematic of feedforward controller with PID controller
��ͼ2��ʾϵͳ�У���Simulink������ͼ12��ʾ��RTWϵͳ���п���ʵ�顣ͼ13��ʾΪ��ģǰ�� PID���Ƶ�ʵ����������ָ�����ǣ��������e(t)Զ����ģ�Ϳ��ƺ;����PID���Ƶ�С��������Ϊϵͳ����ģǰ��������ؼ����ã� PID�������ڳ������ʱ�ٽ��е����������PID����Ҫ���������ϴ���ģǰ��PID��������ֻ��Ҫ������ģǰ�����ƺ��������Ҫ���������ҪС�ö࣬���ԣ�����Ч��Ҫ�Ⱦ���PID���Ƶ�Ч���á�Ϊ������ӳ3�ֿ��Ʒ�����Ч������ʽ(22)�ɵñ�1��ʾ��3�ֿ��Ʒ������������SRM��
��1 3�ֿ��Ʒ����ľ�����(RMS)���
Table 1 RMS of tracking errors under three control strategies
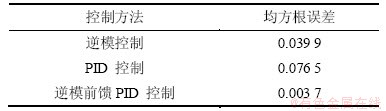
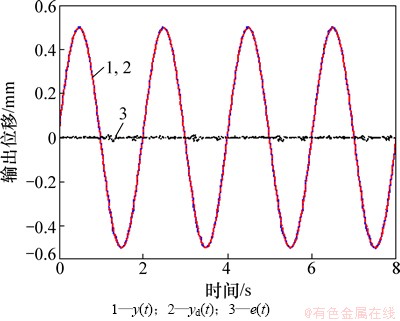
ͼ13 ������ʵ�������ǰ��PID����ϵͳ��������Ƚ��Լ��������
Fig. 13 Comparison of real actuator output and desired output under feedforward PID controller and associated tracking error
 (22)
(22)
���о���3�ֲ�ͬ�Ŀ��Ʒ�����ϵͳ�����˶����ƣ�����PID����Ϊ��ͳ�Ŀ��Ʒ�������ͼ9��ͼ11��ͼ13���бȽϷ��֣�����������Ŀ�����ģ���Ʒ�����PID�����и��ߵĿ��ƾ��ȣ��������������С��50%����������ģ���Ƶ�Ӳ���ṹ���Ӽ�����ʵ��ϵͳ�в��ã�������Ƚ��Ϳ���ϵͳ�ɱ�����ͼ13���Կ��������ô���ģǰ����PID���Ʒ��������λ���������ȼ�С���źŸ��پ��Ƚ�ǰ2�������1������������������Ҫ������ɴ����������ĸ�Ƶ���ۺ��������ڹ��������ȶ���Ҫ��̫��ʱ�ɲ��ÿ�����ģ���ƣ�������Ҫ��ϸ�ʱ�����ü�ǰ����ģ��PID���ơ���2�ַ������ȴ�ͳ��PID���Ʒ������������ơ���Ҫָ�����ǣ������ü���ģǰ����PID���Ʒ���ʱ��Ҫע��PID������ѡȡ��������ֱ��͡������������
4 ����
(1) �������ߺ����߱�ʶ���������˵���ۺ����������е���3�㹲��PPy�������Ķ�����ɢ���ݺ�����ͨ�����������߱�ʶ����һ����֤��ģ�͵�ȷ�ԡ�
(2) ��Ը߶����е��������������ֵ�ϵͳ�������ȶ��Ժ��ܸ����ԣ���ģǰ��PID����ϵͳ�����ŵĿ��Ʒ�����������ע����ǣ�����ִ���ǻ��ڷ���������(��Ҫ1���ⲿ������)���������㰲������ʱ������ʹ�û���ȷ���ݺ�������ģ�ͣ�������ģ�Ϳ���ͨ�����߱�ʶ����ȷ����
�ο����ף�
[1] Vidal F, Plesse C, Palaprat G, et al. Conducting IPN actuators: From polymer chemistry to actuator with linear actuation[J]. Synthetic Metals, 2006, 156: 1299-1304.
[2] ������. �Ե���ۺ��ﹹ�������������Ʊ��������о�[D]. ����: �廪��ѧ��ѧϵ, 2006: 4-20.
HE Ximin. Fabrication and properties research of actuators based on conducting polymer[D]. Beijing: Tsinghua University. Department of Chemistry, 2006: 4-20.
[3] ����, �Ը�, ������, ��. IPMC�˹�������Ʊ������о�[J]. ���ܲ���, 2013, 44(11): 1646-1650.
XU Yan, ZHAO Gang, YANG Liming, et al. Research on preparation technique of IPMC artificial muscle[J]. Journal of Functional Materials, 2013, 44(11): 1646-1650.
[4] Han G, Shi G. Conducting polymer electrochemical actuator made of high-strength three-layered composite films of polythiophene and polypyrrole[J]. Sensors and Actuators B, 2004, 99: 525-531.
[5] Gaihre B, Alici G, Spinks G M, et al. Synthesis and performance evaluation of thin film PPy-PVDF multilayer electroactive polymer actuators[J]. Sensors and Actuators A, 2011, 165: 321-328.
[6] Hiraoka M, Fiorini P, O��Callaghan J, et al. Miniature conductive polymer actuators for high pressure generation in lab onchip systems[J]. Sensors and Actuators A, 2012, 177: 23-29.
[7] Fuchiwaki M, Tanaka K, Kaneto K. Planate conducting polymer actuator based on polypyrrole and its application[J]. Sensors and Actuators A, 2009, 150: 272-276.
[8] Alici G, Devaud V, Renaud P, et al. Conducting polymer microactuators operating in air[J]. Journal of Micromechanics and Microengineering, 2009, 19: 1-9.
[9] Nguyen C H, Alici G, Wallace G G. Modelling trilayer conjugated polymer actuators for their sensorless position control[J]. Sensors and Actuators A, 2012, 185: 82-91.
[10] Shoa T, Yoo D S, Walus K, et al. A dynamic electromechanical model for electrochemically driven conducting polymer actuators[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(1): 42-49.
[11] Alici G. An effective modelling approach to estimate nonlinear bending behaviour of cantilever type conducting polymer actuators[J]. Sensors and Actuators B, 2009, 141: 284-292.
[12] Du P, Lin X, Zhang X. A multilayer bending model for conducting polymer actuators[J]. Sensors and Actuators A, 2010, 163: 240-246.
[13] John S W, Alici G, Cook C D. Inversion-based feedforward control of polypyrrole trilayer bender actuators[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(1): 149-156.
[14] Yao Q, Alici G, Spinks G M. Feedback control of tri-layer polymer actuators to improve their positioning ability and speed of response[J]. Sensors and Actuators A, 2008, 144: 176-184.
[15] Fang Y, Tan X, Alici G. Robust adaptive control of conjugated polymer actuators[J]. IEEE Transactions on Control Systems Technology, 2008, 16(4): 600-612.
(�༭ �²ӻ�)
�ո����ڣ�2013-07-11�������ڣ�2013-09-17
������Ŀ������ʡ��������ѧ�о��ص���Ŀ(13A081)������ʡ�Ƽ����Ƽ��ƻ��ص���Ŀ(2013FJ2016)������ʡ������������Ŀ(11C1089)�������пƼ���Ŀ(2013KS77)
ͨ�����ߣ�����(1979-)���У����ϳ�ɳ�ˣ�˶ʿ����ʵ��ʦ�����»�е����ͻ���ϵͳ�����Կ��Ƶ��о����绰��13327344488��E-mail��51269314@qq.com
ժҪ�����ڵ���ۺ���������������ԡ��͵�ѹ�����ҿ��ڿ�����������ʹ�õ��ŵ㣬���õ���ۺ�������������������������ʵ��ϵͳ�����˶�λ�ƽ��в��������п����о������ȣ�Ϊ�˽�������ۺ�������������ϵͳ���ݺ���ģ�ͣ��ֱ������С�������߱�ʶ�����������߱�ʶ������������������ȷ�Ķ�����ѧģ�͡���Σ�����ϵͳ��ʶģ�ͽ���������ϵͳ��ģ�ͣ����Կ�����ģǰ�����ƽ����о�����������ģǰ��PID���Ʒ��������������о�ȷ�˶����ƣ����봫ͳPID���ƵĿ������ܽ��бȽϡ�ʵ������������ģǰ��PID���ƾ��кܸߵĿ��ƾ��Ⱥ�³���ԡ�
