
������ƽ̨�Ľ���ģ��PID����
������1, 2��̷ ��1
(1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083��
2. ���Ϲ�ҵְҵ����ѧԺ ��������ϵ������ ��ɳ��410082)
ժ Ҫ��
ժ Ҫ�����ܲʽ������ƽ̨�Ľṹ�빤��ԭ��������������ƽ̨����ѧģ�͡�������������ռ�����任ʵ��ƽ̨3���ɶȵĽ���о�������ƽ̨��ģ��PID���ơ��ÿ��Ʒ������ݲ�ͬ��ƫ��E��ƫ��仯��EC��PID����Kp��Ki��Kd������У����������Kp��Ki��Kd��ģ���������ʵ����������ƽ̨�Ľ�Ծ��Ӧ��������С��ԼΪ6%������ʱ��ԼΪ0.1 s����̬���ԼΪ2%����ƽ̨��������ƫ��0.2 mmʱ��ϵͳ���ܿ��ٻص�ƽ��λ�����ȶ�������ϵͳ���кܺõĸն��������Ժ�³���ԡ�
�ؼ��ʣ�
ģ��������PID����������������ź������
��ͼ����ţ�TM273.1 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2009)04-0963-06
Decoupling fuzzy PID control for magnetic suspended table
HU Han-hui1, 2, TAN Qing1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. Department of Electrical Engineering, Hunan Industry Polytechnic, Changsha 410082, China)
Abstract: The working principle and structure of differential magnetic suspension were introduced, and the mathematical model of magnetic table was built up. The input and output space variables were used to transform achieve 3 degrees of freedom of decoupling. The fuzzy PID control plan of magnetic table was proposed and PID parameters, Kp, Ki and Kd, were accomplished self-tuning. According to different deviation E and deviation rate of change EC, and fuzzy regular table of Kp, Ki and Kd were determined. The results show that the system overshoot of step response is very small (about 6%), the rising time is about 0.1 s, and the static error is about 2%. When the platform is deviated 0.2 mm down, the system still can fast return to the balance position and suspend stably, which shows that the system has very good stiffness and damping characteristics and robustness.
Key words: fuzzy control; PID control; magnetic suspension; decoupling control
���е��С�����֧�С�Һ����е�֧�з�ʽ��ͬ��������֧�м��������õ����������ʹ��֧�������붨��֮�䴦���Ӵ�����״̬����������Ⱦ����ά�������ٶȡ��߸նȡ��߶�λ���Ⱥͳ��������ŵ㡣������ƽ̨�Ŀ����Ǵ�����ƽ̨�ĺ��ļ��������������ܲ��������˴������ܷ�ʵ�֣����һ�ֱ��Ӱ�쵽ƽ̨�Ķ�λ���Ⱥͳ��������ȹؼ�ָ�꣬���ԣ�������������ƽ̨����У�����������Ƽ��Ż��Ե���Ϊ��Ҫ[1]�����������Ʊ�������ϵͳ�Ŀ����ԡ��ȶ��ԡ�³���Ե�Ҫ����ʹ�����ƽ̨�Ŀ��Ʒ���[2-5]����ɷ�Ϊ���Կ��ƺͷ����Կ���2�ࡣ���Կ���������ϵͳ�ڹ����㴦�����Ի�ģ��Ϊ��������PID����[6]��״̬��������[7]Ϊ�����������Կ��ư���ģ���� ��[8]����ģ��ṹ����[9]�ȡ������ε�[10-11]�����ģ�����Ʒ����ۺ������Կ��ƺ�ģ�����Ƶ��ŵ㣬���ǿ��Ʋ�����������Ȼ����ϵͳ�ڹ����㴦���������������еģ���������ƽ̨��һ�������Զ��������ϵͳ�������ɶ�֮�������ϣ���ˣ��������߶Դ�����ƽ̨���н������Ի���Ȼ����ģ��PID�����Ը�ƽ̨���п��ƣ�ͨ�����������[12]��ʵ�飬ȡ���˷dz��õĿ���Ч����
1 ����ԭ��
�ʽ������ƽ̨�Ľṹ�빤��ԭ����ͼ1��ʾ������̶�������������������װ���һ��Ĵ�ֱ�����4�ԡ�U���͵����������Ȧ�뵼��������ö�����������Ȧͨ�����ÿ�ԡ�U���͵�����в����ų����ôų���Ӧ����ʹ֮��ƽ̨�������ϵĴ�����������ֱ����4�Դ���������������������ƽ��ʱ�����������������ڿ��С�
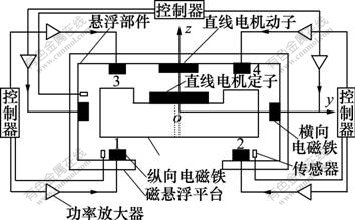
ͼ1 ������ƽ̨�ṹ������ԭ��ͼ
Fig.1 Diagram of magnetic structure and working principle
��������2�Ե�����������ṩ������������Ĵ�С�㶨�ĵ���������Ա��ϲ���ʱ���˶���ֱ�ߡ�����ˮƽ��������ͨ��������ɸı���Եļ�϶����ߵ��ȡ�
2 ������ƽ̨��ģ
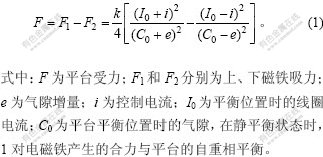
2.1 ���������
������ƽ̨һ����ò���ţ������ֲ������ʽ�£�ƽ̨������Ϊ�ϡ��´�������֮�
2.2 ��������·��ѹ����
����1�Բ���ӵĵ������ͼ2��ʾ���ϡ�����Ȧ����Ȧ����һ����
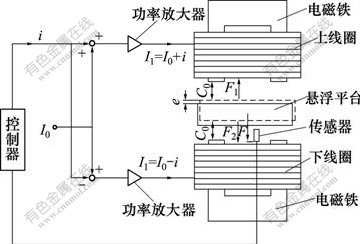
ͼ2 ���ʽ�����
Fig.2 Differential way electromagnet
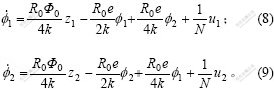
��������Ȧ�����ѹ����Ϊ��

2.3 ������Ʒ���
���ڵ���������ݴ�·�������У�
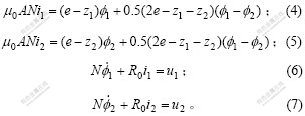
��ʽ(4)��(5)�е�i1��i2�ֱ����ʽ(6)��(7)����ȥ�ߴ���õ���ͨ�ı仯�ʵ����Խ���Ϊ��
��ƽ��λ���´�ͨΪ![]() ���ż����ĵ�����ֱ�Ϊ��
���ż����ĵ�����ֱ�Ϊ��
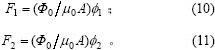
��ȥ��ͨ���õ�2����������������ַ���Ϊ��
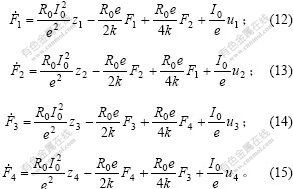
ʽ(12)~(15)��4����ѹ�����Ĺ�ϵ�������������Ʊ�Ϊ��ѹ���ƣ�û�е��������������Ĵ��ֻ��ڣ������˿���ϵͳ�������Ĺ������С�
������������任������任��

������ƽ̨���任�ͻ���ɵõ�3������[13-17]�Ĵ��ݺ�����

��ʽ(23)~(25) 3�����ݺ�������������3�������뵥����Ŀ�������
3 ģ��PID���������
3.1 ȷ��ϵͳ�������������
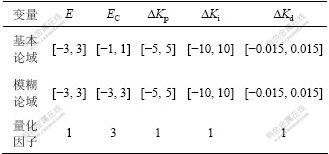
������ϵͳ���Ƶ�Ŀ����ʹ���������ijһ����ֵ����ˣ�ѡ��ģ�����������������Ϊ��е�λ��ƫ��E��ƫ��仯��EC�������ΪPID������������?Kp��?Ki��?Kd������E��EC��?Kp��?Ki��?Kdģ������ģ���Ӽ���Ϊ{NB, NM, NS, ZO, PS, PM, PB}�����У�NB, NM, NS, ZO, PS, PM, PB�ֱ��ʾ�����С���С���㡢��С�����к�����������ĸ��dz̶Ⱥ������ȡ��ȶ�����³����ԭ��ģ���Ӽ���ѡ���������������������ǵı�������������ģ�����������������1��ʾ��
��1 ģ��PID������
Table 1 Fuzzy PID parameters table
����PID�����������Լ��ڲ�ͬ��ƫ��仯�¶�PID������Ҫ�õ����?Kp��?Ki��?Kd 3������ģ���Ӽ���ģ�����Ʊ�(��2)��
��2 ?Kp��?Ki��?Kdģ���Ӽ���ģ�������
Table 2 Fuzzy rule table of subset of ?Kp, ?Ki, ?Kd
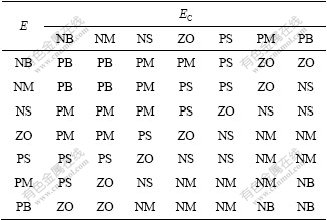
ע��?Kp, ?Ki��?Kd��ģ���Ӽ���Ϊ{NB NM NS ZO PS PM PB}.
3.2 ģ����������ģ����
����ǰ���ģ������������ƫ��E��ƫ��仯��EC�������������Եó���Ӧ����������ȣ������������������ȣ����Ӧ��?Kp�ĵ�1��ģ�������������Ϊ��
![]()
�Դ����ƣ�������������?Kp�ڲ�ͬƫ���ƫ��仯�µ�����ģ����������������ȡ���ijһ����ʱ�̣�����ƫ���ƫ��仯�IJ���ֵ���������ķ�(Ҳ��Ϊ��Ȩƽ����)������ô�ʱ?KpΪ��
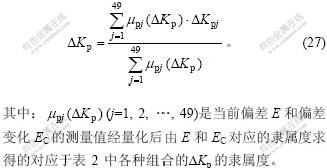 ͬ�����ɵõ�?Ki��?Kd�������ȡ����������Ƶ��Ĺ�ʽ����������ֵ�����������ԣ���Ҫ���е�����PID�����ĵ����㷨Ϊ��
ͬ�����ɵõ�?Ki��?Kd�������ȡ����������Ƶ��Ĺ�ʽ����������ֵ�����������ԣ���Ҫ���е�����PID�����ĵ����㷨Ϊ��

4 ʵ�鼰����
ͼ3��ʾΪ������ƵĴ�����ת��ϵͳ�����ֿ��ƿ�ͼ������ϵͳ����������ƽ̨��DSP���ֿ����������ŵ�·����������PC����װ����ɡ�
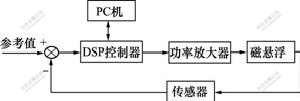
ͼ3 ������ƽ̨ϵͳ�����ֿ��ƿ�ͼ
Fig.3 Diagram of digital control of magnetic table system
������ƽ̨����Ϊ��ƽ̨����1.24 kg����ƫ�õ���1.1 A����ƫ�õ���0.9 A����Ȧ����400����϶2 mm��λ�Ƹն�50 768 N/m�������ն�100.53 N/A��
ϵͳ�й��ʷŴ������õ�ѹ-�������ʷŴ�������Ŵ���Ϊ344 mA/V��λ�ƴ��������õ�������������������Ϊ8 V/mm����Ŵ���Ϊ8 000��
ͼ4��ͼ5��ʾ�ֱ�Ϊģ��PID�����´�����ƽ̨�Ľ�Ծ��Ӧ��ֹͣʱλ�Ʋ��Ρ���ͼ4��5���Կ�����ϵͳ��Ծ��Ӧ��������С��ԼΪ6%������ʱ��ԼΪ0.1 s����̬���ԼΪ2%��
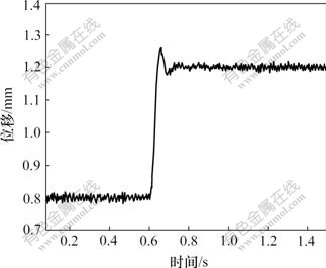
ͼ4 ƽ̨��ʱ��λ�Ʋ���
Fig.4 Displacement graph of suspended system

ͼ5 ƽֹ̨ͣʱ��λ�Ʋ���
Fig.5 Displacement graph of ceased system
ͼ6��ͼ7�ֱ�Ϊģ��PID���ƺͳ���PID������ϵͳ�ij����Ӧ���ɼ�����ϵͳ�ܵ��������ʱ��������ƽ̨ϵͳ��������ƫ��0.2 mm������Ȼ�ܹ��ص�ƽ��λ�����ȶ���������˵��ϵͳ�ĸն��������Ժã��ȶ��Ժá�
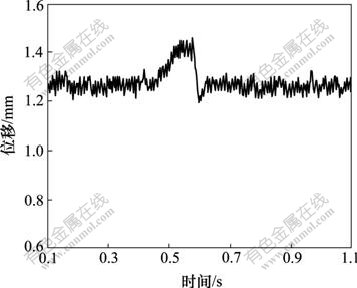
ͼ6 ģ��PID�����µij����Ӧ
Fig.6 Impact response using fuzzy PID controller
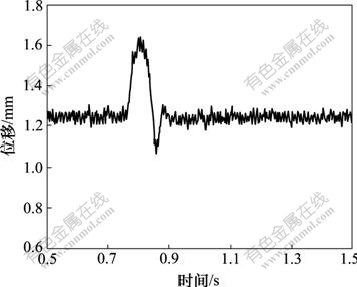
ͼ7 PID�����µij����Ӧ
Fig.7 Impact response using PID controller
ͨ���Ա�ģ��PID���ƺͳ���PID����ʱϵͳ�ij����Ӧ��֪��ģ��PID���������и�ǿ��³���ԺͿ�����������
5 �ᡡ��
a. ������ƽ̨������3�����ɶ�֮�����ϣ���ͨ����������ռ��е�����任����������
b. ͨ���������E��EC������ģ������ԭ����PID 3���������������ġ�
c. �봫ͳ��PID���Ʒ����Ƚϣ�����ģ��������PID���ƵĴ�����ƽ̨ϵͳ��Ծ��Ӧ������Ϊ6%������ʱ��Ϊ0.1 s����̬���Ϊ2%����ƽ̨��������ƫ��0.2 mmʱ��ϵͳ���ܿ��ٻص�ƽ��λ�����ȶ�������ϵͳ����Ӹ��ž��к�ǿ���ȶ��ԣ��кܺõ������ܺ�ƽ�ȵ�ֹͣ���ܡ�
�ο����ף�
[1] Lin C S, Lay Y L, Chen P W, et al. The laser displacement measurement with feedback control in a magnetic levitation and suspension system[J]. Computer Methods in Applied Mechanics and Engineering, 2000, 190(1/2): 25-34.
[2] Stephen C, Paschall II. Design, fabrication, and control of a single actuator magnetic levitation system[D]. Texas: Department of Mechanical Engineering, Texas A&M University, 2002.
[3] �쟺��, ������. ���������ɶ�������������п������о���̽��[J]. Ӧ�ÿ�ѧѧ��, 2002, 20(1): 55-60.
ZHU Huang-qiu, XU Long-xiang. A study and discussion on a controller for radial four-degree freedom active magnetic bearing[J]. Journal of Applied Sciences, 2002, 20(1): 55-60.
[4] ��Ⱥ��, �� ��, �� ��. ���������³�����������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2007, 38(5): 922-927.
LI Qun-ming, ZHU Ling, XU Zhen. Robust controller design of maglev ball system[J]. Journal of Central South University: Science and Technology, 2007, 38(5): 922-927.
[5] Gentili L, Marconi L. Robust nonlinear disturbance suppression of a magnetic levitation system[J]. Automatica, 2003, 39(4): 735-742.
[6] XU Shao-hui, XU Zheng-guo, JIN Neng-qiang, et al. Acceleration sensorless levitation control scheme for the hybrid maglev system[C]//Proc Int Conf on Magnetically levitated System��2004. Shanghai, 2004.
[7] Gurol S, Baldi R, Bever D. Status of the general atomics low speed urban maglev technology development program[C]//The 18th International Conference on Maglev Systems and Linear Drivers. Shanghai, 2004.
[8] WANG Zhang-hai, WANG De-jun. Dynamic characteristics of a rolling mill drive system with backlash in rolling slippage[J]. Journal of Materials Processing Technology, 2000, 97(1): 69-73.
[9] Yeou K T, Tsih C W. A novel compensation approach for self- sensing maglev system with controlled-PM electromagnets[J]. IEEE Trans on magnets, 1995, 31(6): 4208-4210.
[10] ������, �� ��, ��ҵ��. ��������еı����PID����[J]. �人������ѧѧ��, 2004, 26(2): 35-37.
SU Yi-xin, WANG Juan, HU Ye-fa. A variable parameter PID controller for the magnetic bearings[J]. Journal of Wuhan University of Technology, 2004, 26(2): 35-37.
[11] Ҧ����, �� ��. ����ģ��������PID���ƵĴ�������п�����[J]. �Ӻ���ѧ���ݷ�Уѧ��, 2004, 18(1): 46-48.
YAO He-qing, FENG Jun. PID controller of magnetic suspension bearing based on fuzzy self-regulating[J]. Journal of Hohai University Changzhou, 2004, 18(1): 46-48.
[12] ʯ �], �� ��, ������. ���Ͻ�����MIG���ۿ�����ϵͳ����[J]. �й���ɫ����ѧ��, 2007, 17(12): 1955-1959.
SHI Yu, HE Jun, WU Ming-liang. Simulation of MIG welding control system for aluminum alloy[J]. The Chinese Journal of Nonferrous Metals, 2007, 17(12): 1955-1959.
[13] ���质, �����. �����ܴ���������̨����������[J]. ��е����ѧ��, 2004, 40(9): 84-88.
LI Li-chuan, DING Yu-cheng. High-precision magnetically suspended table and its decoupling control[J]. Chinese Journal of Mechanical Engineering, 2004, 40(9): 84-88.
[14] ������, �� ��. ��������������ϵͳ�Ľ�����Ʒ���[J]. ��������ҵ��ѧѧ��, 2005, 37(3): 325-328.
SONG Wen-rong, Zhang Ling. Decoupling control of a maglev feeding mechanism[J]. Journal of Harbin Institute of Technology, 2005, 37(3): 325-328.
[15] Li L. Compensation of rotor imbalance for precision rotation of planar magnetic bearing rotor[J]. Precision Engineering, 2003, 27(2): 140-150.
[16] �ܽ���, �� ��. ��Ӧ�ʹ������綯���Ľ������[J]. �繤����ѧ��, 2000, 15(5): 1-5.
CAO Jian-rong, YU Lie. Pecouping control for induction type bearingless motor[J]. Transactions of China Electrotechnical Society, 2000, 15(5): 1-5.
[17] Mao J, Tachikawa H, Shimokohbe A. Precision positioning of DC-motor-driven aerostatic slide system[J]. Precision Engineering, 2003, 27(1): 32-41.
�ո����ڣ�2008-11-15�������ڣ�2009-02-25
������Ŀ��������Ȼ��ѧ����������Ŀ(50675227)
ͨ�����ߣ�������(1971-)���У���������ˣ������ڣ����»�е���ӿ��Ƽ����о����绰��13874899614��E-mail: hhxhn_01@163.com
[10] ������, �� ��, ��ҵ��. ��������еı����PID����[J]. �人������ѧѧ��, 2004, 26(2): 35-37.
[11] Ҧ����, �� ��. ����ģ��������PID���ƵĴ�������п�����[J]. �Ӻ���ѧ���ݷ�Уѧ��, 2004, 18(1): 46-48.
[12] ʯ �], �� ��, ������. ���Ͻ�����MIG���ۿ�����ϵͳ����[J]. �й���ɫ����ѧ��, 2007, 17(12): 1955-1959.
[13] ���质, �����. �����ܴ���������̨����������[J]. ��е����ѧ��, 2004, 40(9): 84-88.
