
���ڳ����Ļ��ʽ·���յ�ϵͳ����о�
������1, 2���ؽ�1
(1�����ϴ�ѧ ��ͨ���乤��ѧԺ������ ��ɳ��410075��
2���㽭�ƾ�ѧԺ ���̹���ѧԺ���㽭 ���ݣ�310018)
ժ Ҫ��
ϵͳ�ͷֲ�ʽ�յ�ϵͳ���ŵ㣬������ڳ���������/�ֲ����ʽ·���յ�ϵͳ�Ŀ�ܽṹ����·�������㷨����ϵͳ����������ϵͳ�ͷֲ���ϵͳ2���֣�����������ϵͳ����ϵͳ�г������ռ���ʵʱ��ͨ��Ϣ��ͨ�������Ľ�ͨģ������Ԥ�����յ���Ϣ�������յ���Ϣ��ϵͳ�еı��յ������������ֲ���ϵͳ�еij�����ͬʱ�䵱�յ�ϵͳ�ĸ�Ӧװ�á����ݴ���װ�á����㵥Ԫ�Լ�ʹ���ߣ����յ�������ϵͳ�������յ���Ϣ�������ٽ���������ڵ�ʵʱ��ͨ��Ϣ���յ���Ϣ����������������ʻԱѡ������ʵ��յ�·���������������������������ʽ·���յ�ϵͳ����Ч���ͽ�ͨ�����ڳ�����ƽ������ʱ�䡣
�ؼ��ʣ�
���ʽ��·���յ�ϵͳ�������·��������
��ͼ����ţ�U492 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0530-06
Framework for vehicle-based hybrid route guidance system
NI Ling-lin1, 2, QIN Jin1
(1. School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China��
2. College of Business Administration, Zhejiang University of Finance & Economics, Hangzhou 310018, China)
Abstract: This work mainly presents concept, framework and decentralized algorithms for a vehicle-based centralized/decentralized hybrid route guidance system. In the hybrid route guidance, the vehicle senses, transmits and receives network real-time traffic information, and acts as a computer and user of guidance. A hybrid framework was presented, in which the predictive guidance information was computed by centralized sub-system using special traffic information and model, and these information was received and revised according to the real-time local information by the vehicle-level decentralized sub-system, and the drivers used the revised information to help select the rational paths. The results show that the vehicle-based hybrid route guidance system can reduce the average travel time in the transportation network obviously.
Key words: hybrid; route guidance system; framework; path adjustment
���ܽ�ͨϵͳ(Intelligent transportation system, ITS)�ǽ��Ƚ�����Ϣ������ͨѶ���������м��������Ƽ����Լ��������������Ч�ؼ���������������ͨ���������ϵ��������һ���ڴ�Χ�ڡ�ȫ��λ�������õģ�ʵʱ��ȷ����Ч���ۺ��������ϵͳ��·���յ�ϵͳ(Route guidance system, RGS)�����ܽ�ͨϵͳ��һ����Ҫ��ɲ��֣����ǻ��ڵ��ӡ�ͨ���Լ�������ִ�������ͨ���յ���ʻԱ�ij�����Ϊ������·�潻ͨϵͳ����ֹ��ͨ�����ķ�������������ʵ�ֽ�ͨ���ڽ�ͨ�����и���·���ϵĺ������䡣
����ϵͳ������·������ͷ����ص�IJ�ͬ��·���յ�ϵͳ�ɷ�Ϊ����ʽ·���յ�ϵͳ(Centrally route guidance system, CRGS)�ͷֲ�ʽ·���յ�ϵͳ(Distribution route guidance system, DRGS)[1]��ǰ�����ڽ�ͨ��Ϣ���ĵ������ϣ�����ʵʱ��ͨ��Ϣ����·���Ż�ѡ��Ϊÿһ�����ܵ�OD�Լ�������Ż�����·�ߣ�Ȼ��ͨ���㲥��ͨ�������ṩ���û���������������Ϣ���ģ�ֻ����Ӵ���������ʵʱ��ͨ��Ϣ����������Ϣ���������еij�������������ݴ�ͨѶ�����н��յ���ʵʱ��ͨ��Ϣ����ϳ����豸�д洢���й����ݣ��ڳ��ؼ�����ڼ�������Ż�����·�������ν���·���յ����ɴ˿���֪����CRGS��һ�ֵ��͵�Ԥ�����յ�ϵͳ����DRGS����һ�ֵ��͵ķ�Ӧ���յ�ϵͳ��
CRGS��DRGS��������ȱ�㣺DRGS���ڲ��ܳ�ֹ�����Ϣ����ˣ��Խ�ͨ���罻ͨ״����Ԥ��������ʵ�����ϴ�CRGS��Ȼ���ṩ�ϸ�������Ԥ�⣬�������ڼ���������ˣ����ڽϴ�Χ�ڵĽ�ͨ״��Ԥ�����һ���Ѷȡ��о�������Ԥ����CRGS�ھ��пɿ����ݵ�ǰ���£��ܹ��ṩ��������·���յ���Ϣ[2-4]������Ӧ��DRGS����CRGS������Ч�������(�������ڼ�����Դϡ�٣�Ԥ��������Լ��豸���Ƶ�)�����ṩ�ﵽ��ʻԱ�ɽ���ˮƽ�ĸ���·���յ���Ϣ[5-8]��
CRGS����������ͨ�����Ͻ��������Ż�����DRGS������С��Χ���ṩ��������·���յ���Ϣ����˿ɿ��ǽ�����2���յ�ϵͳ���ŵ�����������������/�ֲ����ʽ·���յ�ϵͳ��ϵͳ���������յ���ϵͳ�ͷֲ��յ���ϵͳ2��ϵͳ�������յ���ϵͳ���ڳ��еĽ�ͨ��Ϣ�����ڽ��в���������������ʶ��Ƚ�ǿ��������ִ�д�Χ��Ԥ�����յ������ֲ��յ���ϵͳ�������ڽ�ͨ�����еij�����(���г����ϵ���Ӧ�����豸���ɷֲ���ϵͳ)���书�ʺͼ�������Ҳ�Ƚ����ޣ�һ�㲻�ܽ��д�Χ�ڵ�ͨѶ���ڸ��ӵļ��㣬���ǣ����������ռ��������ľֲ������ڵ�ʵʱ��ͨ��Ϣ�����ݴ˶�����������ϵͳ��·���յ���Ϣ����������ͬʱ���ֲ���ϵͳ�����Խ�ʵʱ��ͨ��Ϣ���ݸ�������ϵͳ���Ը���������ϵͳ����������ݲ�������ȡ���ŵ��յ�·����
1 ���ʽ·���յ�ϵͳ���
ͨ���Ի��ڳ����Ļ��ʽ·���յ�ϵͳ�ṹ��ܽ��з�����������Ч���CRGS��DRGS���ŵ㣬ʹ���ߴﵽЭ����Ϻ�����䡣���ڳ����Ļ��ʽ·���յ�ϵͳ�Ļ������ͼ�����нṹͼ��ͼ1��ͼ2��ʾ��
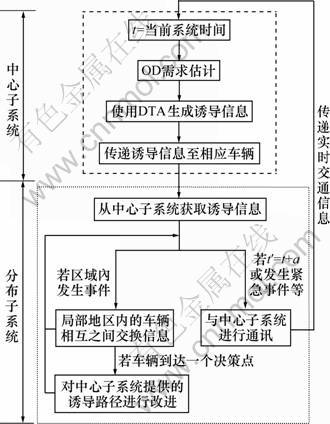
ͼ1 ���ʽ·���յ�ϵͳ���ͼ
Fig.1 Framework of vehicle-based hybrid route guide system
ͼ1�е�t��t�����ʾʱ�䣬�ڸ��յ�ϵͳ��ܽ� ���У��ϲ��������ϵͳ�̶���ÿ��a���Ӿͼ��㲢����1��ȫ�����·���յ���Ϣ�����յ���Ϣʹ�û��ڵ�ǰOD�������Ķ�̬��ͨ����(Dynamic Traffic Assignment��DTA)ģ�����ɣ���ˣ��ǵ��͵�Ԥ������Ϣ���ֲ�ʽ��ϵͳ��������Ӧ�����ϣ���Щ��������Ϊ������Ϣ�ĸ�Ӧװ�ú����ݴ���װ���Լ��յ���Ϣ�ļ��㵥Ԫ��ʹ���ߣ�����ÿ��a���ӾͿ��յ�����������ϵͳ���º���յ���Ϣ�������ʱ���� �У�һ�������ڵij���֮�仹�����������ϢͨѶ��ϵ��ֻҪ�������ض��ġ��¼���(�糵��������ij���ڵ㣬�������ڷ�����ͨ�¹ʵ�)�������ڵ����г��������յ����º�Ľ�ͨ��Ϣ���ݡ���Ϊ����֮�����Ϣ����ֻ���ھֲ������ڽ��У�����Ϊ�˷�������������⣬ʹ��r���������峵���ľֲ�������ǰ������r�������Գ�����ǰ����λ��ΪԲ�ģ��Գ���rΪ�뾶�ķ�Χ����ͼ2��ͼ3����ʾ��
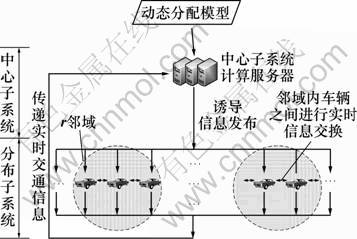
ͼ2 ���ʽ·���յ�ϵͳ���нṹͼ
Fig.2 Operation architecture of vehicle-based hybrid route guide system

ͼ3 ������r�����Լ����з��ù���
Fig.3 The r-neighborhood of the vehicle and the components of travel cost
���ʽ·���յ�ϵͳ�е�������ϵͳ��������ݿ��е���ؽ�ͨ��Ϣ����������Ԥ���͵�·���յ���Ϣ���������յ���Ϣ���䵽��ͨ����������װ������Ӧ�����豸�ij����ϡ����ڽ�ͨ�����Ͻ�ͨ������������Ӷ�䣬����������ϵͳ���㷨���ӶȻ�ܸߣ�����ʱ��Ҳ��Ӧ�Ƚϳ�����������ɵ��յ���Ϣ�Ϳ��ܻ����һ�����ͺ��ԡ��ɴˣ���ͨ������װ�����յ��豸�ij������յ���·������ʱ����Ϣ�����������ϵͳ�ṩ������Դ���������յ���Ϣ�ij�������֪��·������ʱ��Ϳ��ܲ�һ�£������������������ϵͳ�����ͺ��Զ�û��ע�������һЩ�¼��ķ�����Ҳ���������ڽ�ͨ����������¼���Ӱ�죬������������������ϵͳ�ļ���(Ԥ����������ʱ)�����˽ϴ����������������Ϣ��ʵ��������Ϣ֮����ڲ����Ե������£��ͷdz���Ҫʹ��ʵʱ��ͨ��Ϣ�������Ľ�������ϵͳ����õ�����·����Ϣ��ʹ��ʵʱ���ݶ������յ���ϵͳ�ļ�����иĽ���Ŀ�ģ�����Ϊ��ʹϵͳ�ܸ�Ѹ�ٵض�ʱ�̱仯�Ľ�ͨ����״��������ʱ��Ӧ����Ȼ�����Ҫ�����ܽ�����Ӧ�㷨�ļ��㸴�Ӷȡ�
�ڻ��ڳ����Ļ��ʽ·���յ�ϵͳ�У�װ�г����豸�ij������и�Ӧװ�ã����������ռ�ʵʱ��ͨ��Ϣ��������Щ��Ϣ�����������ϵͳ�����߿���������Щ���ݶ�������ϵͳ�����ݿ���и��²������������OD������ƣ��ݴ���ʵʱ����·���յ���Ϣ���������ϵͳ����ڣ������յ���ϵͳ�ڲ������������г����ռ����ݻ����ϣ����Թ���ʽ��Ԥ�������и�·�κͽ���ڵĽ�ͨ�������Ӷ����ɸ���·���յ���Ϣ��
װ���г����豸�ij�����Ϊ·���յ�ϵͳ���û���һ��ֻ�ǵ������뽻ͨ��Ϣ���Ľ�����Ϣ�Ľ� �������ǿ��ǵ����������װ���Ƚ���ͨѶ�����豸�����豸����������Ӧװ�ã�����������С�͵ļ��㵥Ԫ����˳����豸��Ϊ�ֲ���ϵͳ����Ҫ�����������ȫ������ϵͳ�з��Ӹ�������á�����ڳ�����r�����ڣ�����֮����Ա����ͨѶ��ʵʱ��ͨ��Ϣ���������ɳ����ռ����ڳ���֮�乲������ʹ�����豸������r�����ڵ����½�ͨ��Ϣ���ݲ��������ʵʱ���³�Ϊ���ܡ��ڴ˻����ϣ��ֲ���ϵͳ�ļ��㵥Ԫ������Щʵʱ�����½�ͨ��Ϣ���Ϳ��Զ�֮ǰ��������ϵͳ������·���յ���Ϣ���м�ʱ�������¡���ˣ�ͨ����ͨ��Ϣ���ĵ�Ԥ����������ϵͳ�ͻ��ڳ����ķ�Ӧ�ͷֲ���ϵͳ���л���Ϻ�����䣬�����Գ���Ϊ���ĵĻ��ʽ·���յ�ϵͳ�����ԶԵ�һ�����յ�ϵͳ���ɵ�·���յ���Ϣ����������Ч������
�������������ڻ��ڳ���������/�ֲ����ʽ·���յ�ϵͳ�����������䵱������ϵͳ�ĸ�Ӧװ�ú����ݴ���װ�ã��ڽ�ͨ�������ռ�ʵʱ��ͨ��Ϣ����������ϵͳ���䣬ͬʱҲ��Ϊ�ֲ���ϵͳ�еĸ��塣�����ϵij����豸���Խ�����������ϵͳ�������ɵ�·���յ���Ϣ�����䵱�յ�ϵͳ�ļ��㵥Ԫ���������ռ��ľֲ������ڵ�ʵʱ��ͨ��Ϣ����������ϵͳ���ɵ������յ�·�������������ɴ˿�֪���ڻ��ʽ·���յ�ϵͳ�У������䵱�˸�Ӧװ�á����ݴ���װ�á����ݽ���װ�á����㵥Ԫ���û��ȶ��ؽ�ɫ�������˼�����Ҫ�����ã���ˣ���������������Ļ��ʽ·���յ�ϵͳ��ʵ�������Էֲ���ϵͳ(������)Ϊ���ĵġ�
2 �ֲ�ʽ·�������㷨
������������ϵͳ�и��ݵ�ǰ�Ľ�ͨ��Ϣ���ж�̬��ͨ������Ԥ�����������ֲ����Ѿ��кܶ�ij����ģ�ͺͷ�������������۷ֲ���ϵͳ�е��㷨�� �⡣�˴����������ڳ����Ļ��ʽ·���յ�ϵͳ�зֲ���ϵͳ��·�������㷨�����㷨�ܹ�����������ϵͳ�ͷֲ���ϵͳ֮���������ϵ������������ϵͳ������Ԥ�����յ�·����Ϣ���иĽ��������㷨����ʹ�õ��Ż�·��������������ȷ���ı�ѡ·�����ϡ�
������ϵͳ�������ɵ��յ���Ϣ�����ڴ��ģ��Ԥ���Ͷ�̬��ͨ����ģ�ͣ���Щ��Ϣ���ܶԽ�ͨ���ij���Ԥ���Ϊ���������Ƕ��ڶ������ζ��ԣ���Ԥ�����������ʵ�ʽ�ͨ״������һ�£���ˣ������ʹ��ʵʱ��ͨ���ݽ���Ԥ��ͷ�������Ȼ���ṩ�������ߵ�·���յ���Ϣ�����ǣ�����������ϵͳ���ԣ����������Ӵ��Ҹ��ӣ�ʵʱ���ݵ��ռ���Ԥ��ģ�͵�����������Ҫһ��ʱ�䣬��ˣ���������ϵͳ��������յ�·����Ϣʵʱ�����ļ����Ѷȹ����������ڳ����ϵķֲ���ϵͳ���ԣ�����������������ޣ����ܸ��ݴ�Χ��ʵʱ��Ϣ���յ���Ϣ������Ч�ļ����������ȴ���Կ��ǽ϶�ʱ������r�����ڵĽ�ͨʵʱ��Ϣ������·�������㷨��������ϵͳ���ɵ��յ�·���������������ǵ�������������ޣ�����·�������㷨���Գ���r�����ڵIJ���·������������
·�������㷨����ʹ�õ�·�����з��ã��������ӵ�ǰ���ڵ�i��·��p����Ԥ�����յ�d�ķ���cp����2������ɣ���1�����Ǵӵ�i��·��p������r����Χ����һ��j(һ�������������߽�ĵ�)������ʱ�䣬����![]() ������һ���Ͼ�ȷ�����з���ֵ����ֵ�dz��صķֲ���ϵͳ����������ϵͳ���й�����֮��õ��ģ���һ�������Ǵ�j����r����Χ֮����յ�d������ʱ�䣬���������ֵΪ
������һ���Ͼ�ȷ�����з���ֵ����ֵ�dz��صķֲ���ϵͳ����������ϵͳ���й�����֮��õ��ģ���һ�������Ǵ�j����r����Χ֮����յ�d������ʱ�䣬���������ֵΪ![]() ����ֵ�������һ�ε�������ϵͳԤ��������������ݣ����ö����ٴμ������������Ϊ����ĿǰҲȱ�ٴ������ʵʱ��ͨ��Ϣ��������Ҳ���Լ��ٷֲ���ϵͳ�ļ���������ˣ������ӵ�ǰ��i��·��p�����յ�d�Ĺ������з���Ϊ��
����ֵ�������һ�ε�������ϵͳԤ��������������ݣ����ö����ٴμ������������Ϊ����ĿǰҲȱ�ٴ������ʵʱ��ͨ��Ϣ��������Ҳ���Լ��ٷֲ���ϵͳ�ļ���������ˣ������ӵ�ǰ��i��·��p�����յ�d�Ĺ������з���Ϊ��
![]() (1)
(1)
�����ͨ�����е����г�����ִ��ͬһ·���Ż��㷨����ô���г�������ѡ���������ʱ��·������ͻ������Ӧ·���ϵĽ�ͨӵ�£���·���ϵ�����ʱ��ͻ����ӡ�Ҳ����˵�����յ��ij�������ѡ������·������һ�����������ģ������յ��ij�������ܷ�����һЩ���ŵĺ�ѡ·���ϣ����������ͨ��������и�Ϊ��������ˣ�����ʹ�������Logit���������յ��ij������������ŵı�ѡ·���ϣ�
 ��
��![]() (2)
(2)
���У�����P��һ����ѡ·�����ϣ����Ǵӵ�ǰ�ڵ㵽d������·���ļ��ϵ�һ���Ӽ���Ŀ�ĵ�Ϊd�ij������յ���������Щ·���ϣ���p���ڵ�ǰ�ڵ���ǰ��d�����г����б��յ���·��p�ı�����cpΪ�ӵ�ǰ�ڵ���·��p����d�ķ��ã�c0��һ��������֤��ʽ���㾫�ȵij������������ģ���У������ȿ��Ը���ʵ��������к�������������õ������ܷ���ʵ������ķ���������統��ͨ�������������յ��豸�ij��������ϴ�ʱ����ô��ȡֵӦ��Խ�С���Ӷ��ܹ�������ƽ�����к�ѡ·���ϵij�������
�ֲ���ϵͳ�б��յ����������й����ж�Ҫִ��·�������㷨���㷨��ȡ���dz������䵱ǰ���ڵ�i�����յ�d��·���������㷨��·���ij�ʼ·��p����������ϵͳ��������Ӧ�յ�·����pjdΪ��ʼ·��p�ϴ�j��d����·������![]() ��
��
·�������㷨�ľ�����㲽�����£�
Step1: ![]() ��
��
Step2: ��·��p��λ��![]() ����֮��������߽�����ĵ�j�������i��j�����·����pij��
����֮��������߽�����ĵ�j�������i��j�����·����pij��
Step3:![]() ��
�� ��
��![]() ��
��
Step4: ����1�������![]() ������ѡ���i��j��·��
������ѡ���i��j��·��![]() ��
��
Step5: ![]() �������·��p��
�������·��p��
����·�������㷨���������·��p���Ƿֲ���ϵͳ����ʵʱ��ͨ��Ϣ��������ϵͳ������·���յ���Ϣ������������յ�·��������·�������㷨�ĸ��Ӷ��복����r�����С�йأ������ǵ���ʵ���г�����r����������ģ�����㷨��ִ��ʱ��Ҳ��dz��̡�
3 ����
����ʹ��1������ͼ4��ʾ�Ľ�ͨ������м���������������й���9���ڵ��24��·�Σ�·���ϵ�����ʱ����ñ���BPR����������
![]()
���У�ta��ʾ�û���·��a�ϵ�ʵ������ʱ�䣻![]() ��ʾ·��a�ϵ�������ʱ�䣻xaΪ·��a�ϵ�ʵ�ʽ�ͨ������CaΪ·��a�����ͨ�����������ͦ�Ϊ����������һ���ȡֵΪ��=0.15����=4��
��ʾ·��a�ϵ�������ʱ�䣻xaΪ·��a�ϵ�ʵ�ʽ�ͨ������CaΪ·��a�����ͨ�����������ͦ�Ϊ����������һ���ȡֵΪ��=0.15����=4��
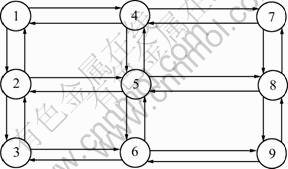
ͼ4 ������ͨ����ṹ
Fig.4 Small transportation network
��������ͨ�����У�����·�γ���ͳһ����Ϊ30����·���ϵ�ͨ������ֵ��������ʱ��ֱ������� (80, 100)��(10, 40)��һ����������ɡ������й���4��OD�ԣ���(1, 9)��(3, 7)��(9, 1)��(7, 3)��ÿ��OD��֮��ij����������ʶ�����Ϊ1 200��/h������ǰ���㷨����ʹ�õ����������ij�ʼֵ�����������£���=0.1��r=100��c0=10������ķ������㶼�����20 min�ڵ������������ݽ��з����ġ�������ϵͳ��Ԥ�����յ���Ϣʹ��DTAģ�ͽ��м������ɣ�����ѡ��ʹ������[9]�е�ģ�ͺ��㷨��
ͼ5��ʾΪ��ƽ������ʱ��ĽǶȶ���������״�����еķ�������������յ�ϵͳ�г�������ָ�������������յ�ϵͳ�ij���ռ�ܳ������ı�����ƽ������ʱ�������ָ�������յ�ϵͳ��δ�����յ�ϵͳ�������֮���ƽ������ʱ���ֵ����ͼ5���Կ����������յ�ϵͳ�г����ʵ���ߣ����յ���δ���յ�����֮���ƽ������ʱ�����һֱ���ֳ����Ͻ��͵����ơ���ʱ���ڱ��յ��������������ӣ����Ƕ��ܸ��õ�ѡ��ӵ�µ�·�����У���ʵ�Ǽ�����ӵ��·�ε�ӵ���̶ȣ���ˣ�2���֮���ƽ������ʱ������Ի����ű��յ��������������Ӷ��������͡�
���⣬��ͼ5�����Է��֣������б��յ�������ƽ������ʱ�������յ�ϵͳ�г����ʵ���ߣ����ֳ����������½������ơ�����Ҫ����Ϊ���г����ʽϵ�ʱ�����յ������������Ѱ�ҵ���ӵ�������·������Ŀ�ĵأ���ˣ���ƽ������ʱ���ϵͣ������г����ʵ�����ߣ����յ�������ƽ������ʱ��ȴ��֮�ӳ���������Ϊ���������б��յ��������������ӣ�ԭ����·���Ϸ���ӵ�£�����ı��յ�������ѡ�����·����ʹ�����·����Ҳ������ӵ�£�����ʱ����·���ϵ�ӵ�²�û�л��⣬�Ӷ����±��յ�����������ʱ�������������յ�ϵͳ�г����ʵļ�����ߣ����յ�������ƽ������ʱ���ֻ����½���������Ϊ��ʱ�����дֳ������ܻ���յ���Ϣ��������������ˣ�������ѡ����ʵ����·�����Ӷ����������������ʱ�䡣
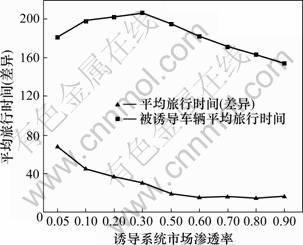
ͼ5 ����ƽ������ʱ�����
Fig.5 Performance of the average travel time of vehicles
4 ����
(1) ����˻��ڳ���������/�ֲ�ʽ���·���յ�ϵͳ��ϵͳ��ܣ�������˽�ͨ�����б��յ�������·�������㷨��
(2) �ڻ��ʽ·���յ�ϵͳ�У�λ�ڽ�ͨ��Ϣ���ĵ�������ϵͳͨ��װ���ڳ����ϵij����豸�ռ���ͨ�����еĽ�ͨ��Ϣ���ݴ˽��м�������Ԥ�����յ���Ϣ�������������б��յ����������������г����豸�ij������ɷֲ���ϵͳ���ҳ�������������ϵͳ������·���յ���Ϣ��ͬʱ��ͨ�����������ڵij����������Ϣ�Ի�������ڵ�����ʵʱ��ͨ��Ϣ���ڽ���ʵʱ��Ϣ���ݻ�������ϵͳ��ͬʱ����������Ͻ��յ���·���յ���Ϣ�������ڵ�ʵʱ��ͨ��Ϣ�����ó����豸�ļ��㵥Ԫ�����յ�·��������������ѡ������ʵ����·������Ŀ�ĵء�
(3) ���ʽ����·��ϵͳ������Ч�ؽ��ͽ�ͨ�����ڳ�����ƽ������ʱ�䣬�������ڴﵽ���ʵ��г�����ʱ�����յ������ij�����Ϣ�����������õ����Ե���ߡ����ʽ·���յ�ϵͳ���������ʽ�յ�ϵͳ�ͷֲ�ʽ�յ�ϵͳ���ŵ㣬�����δ����Ȼ���й����ķ�չǰ����
�ο����ף�
[1] �Ź���. ���ܽ�ͨϵͳ���̵���[M]. ����: ���ӹ�ҵ�����磬2003: 22-24.
ZHANG Guo-wu. Introduction of intelligent transportation system engineering[M]. Beijing: Electronic Industry Press, 2003.
[2] ������, ������. ��̬·���յ�ϵͳ���о���չ[J]. ��·��ͨ�Ƽ�, 2004,17(1): 34-38.
YANG Zhao-sheng, CHU Lian-yu. Study on the development of the dynamic route guidance systems[J]. Journal of Highway and Transportation Research and Development, 2004,17(1): 34-38.
[3] Bottom J. Consistent anticipatory route guidance[D]. Cambridge: Massachusetts Institute of Technology, 2000: 113-118.
[4] Wahle J, Annen O, Schuster C, et al. A dynamic route guidance system based on real traffic data[J]. European Journal of Operational Research, 2001, 13(2): 302-308.
[5] ZOU Liang, XU Jian-min, ZHU Ling-xiang. Application of genetic algorithm in dynamic route guidance system[J]. Journal of Transportation Systems Engineering and Information Technology, 2007, 7(3): 45-48.
[6] Pavlis Y, Papageorgiou M. Simple decentralized feedback strategies for route guidance in traffic networks[J]. Transportation Science, 2002, 33(3): 264-278.
[7] Yaser E. Hawas, Mahmassani H S. Comparative analysis of robustness of centralized and distributed network route control systems in incident situations[J]. Transportation Research Record, 1996, 1537: 83-90.
[8] Wunderlich K, Kaufman D, Smith R L. Link travel time prediction for decentralized route guidance architectures[J]. Transactions on Intelligent Transportation Systems, 2000, 1(1): 4-14.
[9] Bellei G, Gentile G, Papola N. A within-day dynamic traffic assignment model for urban road networks[J]. Transportation Research Part B, 2005, 39(1): 1-29.
(�༭ ���˱�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(70901076)�����ϴ�ѧ����̽���ƻ�������Ŀ(201012200168)���㽭ʡ��ƻ���������Ŀ(11YD24YB)
ͨ�����ߣ��ؽ�(1978-)��������ɽ�ˣ���ʿ�������ڣ����½�ͨ����ϵͳ�Ż��о����绰��13787414541��E-mail: qinjin@csu.edu.cn
ժҪ���������ʽ�յ�ϵͳ�ͷֲ�ʽ�յ�ϵͳ���ŵ㣬������ڳ���������/�ֲ����ʽ·���յ�ϵͳ�Ŀ�ܽṹ����·�������㷨����ϵͳ����������ϵͳ�ͷֲ���ϵͳ2���֣�����������ϵͳ����ϵͳ�г������ռ���ʵʱ��ͨ��Ϣ��ͨ�������Ľ�ͨģ������Ԥ�����յ���Ϣ�������յ���Ϣ��ϵͳ�еı��յ������������ֲ���ϵͳ�еij�����ͬʱ�䵱�յ�ϵͳ�ĸ�Ӧװ�á����ݴ���װ�á����㵥Ԫ�Լ�ʹ���ߣ����յ�������ϵͳ�������յ���Ϣ�������ٽ���������ڵ�ʵʱ��ͨ��Ϣ���յ���Ϣ����������������ʻԱѡ������ʵ��յ�·���������������������������ʽ·���յ�ϵͳ����Ч���ͽ�ͨ�����ڳ�����ƽ������ʱ�䡣
