
����GA��BP����㷨��ˮ�»�����ϵͳ��ģ
������1��������2������ɽ3���α�3�����3
(1. �й������о�������ģ����� �人��430064��
2. �人�Ƽ���ѧ����ѧԺ ����ѧ��, ���� �人��430083��
3. ���������̴�ѧ ˮ�»����˼��������Ƽ��ص�ʵ���ң������� ��������150001)
ժ Ҫ��
n��Elman��������ŵ㣬����һ�����͵Ķ�̬�����硣�������Ŵ��㷨(GA)�������㷨(BP)�Ļ���㷨�����������Ȩֵ������Ϊ����������ٶȣ�����ϵͳ���ھֲ���Сֵ�����Ľ���������Ӧ����ˮ�»�����ϵͳ��ģ���������������������ܶ����������ʷ״̬���м��䣬��ʵ�����ߵ�����ʷ�źŶԵ�ǰֵ��Ӱ�죬���������������ڵ�ķ�������ǿ��������źŴ������������ڻ���㷨�������������ѧϰ�������ٶȺͱ�ʶ���ȡ�
�ؼ��ʣ�
ˮ�»�������ϵͳ��ʶ�����������Ŵ��㷨�������㷨��
��ͼ����ţ�TP24 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0427-05
Neural network identification of underwater vehicle by hybrid learning algorithm
WANG Jian-guo1, JIANG Chun-meng2, SUN Yu-shan3, HE Bin3, LI Ji-qing3
(1. China Ship Development and Design Center, Wuhan 430064, China;
2. Humanities Department, City College of Wuhan University of Science and Technology, Wuhan 430083, China;
3. State Key Laboratory of Autonomous Underwater Vehicle, Harbin Engineering University, Harbin 150001, China)
Abstract: A new dynamic neural network was constructed by borrowing ideas from Jordan and Elman neural networks. To accelerate the rate of convergence and avoid getting into local extremum, a hybrid learning algorithm by Genetic algorithm (GA) and error back propagation algorithm (BP) was used to tune the weight values of the network. Finally, the improved neural network was utilized to identify the AUV hydrodynamic model. The simulation results show that the new network can remember the history state of hidden layer and tune the effect of the past signal to the current value real-timely. And in the presented network, the feedback of output layer nodes is increased to enhance the ability of handling signals. The neural network by hybrid learning algorithm improves the learning rapidity of convergence and identification precision.
Key words: underwater vehicle; system identification; neural network; genetic algorithm; back propagation algorithm
���ſ�ѧ��Ѹ�ͷ�չ������ϵͳԽ��Խ���ӣ����ƾ���Ҫ��ҲԽ��Խ�ߣ���ȷ��ģ����Ϊ��Ҫ����ˣ����ض����ϵͳ��ģ�ڿ���ϵͳ��ƹ�����ռ����Ҫ��λ[1]����ʹ�Dz���ģ�������Ƶ���������ڱ��ض���ȷ��ѧģ�͵Ŀ��Ʋ��ԣ�����ơ������ͷ�������У�ȷ��ϵͳ����������ԵĻ��[2]ʹ��ƵIJ������ӽӽ�ʵ��ϵͳ������ϵͳ��ģ��Ϊ�������۵���Ҫ��֧�������൱��Ҫ�����塣����ˮ�»�������˵���������˶����ж����ɶȡ�ǿ�����Ժ�ʱ�����ԣ�ͬʱ����ÿ����ҵ����Ҫ����صĴ����������仯ʹ������״������ƽ�ⷢ���仯���˶�����Ҳ��֮�ı䣬�������ֶ�̬�ķ�����ϵͳ��ͳ�Ľ�ģ�����кܴ�ľ����ԡ�������������������⾫�ȱƽ����������ӳ������������ö�̬�������磬��֮�Ľ��Ļ���㷨ͨ���˶�����ֱ������ʶˮ�»����˵��˶����ԣ�����������������ˮ�»����˵��˶�ģ�ͣ�������Ϊ����Ӧ�������ı�ʶ����Ϊ��������ṩ��Ϣ�ȣ���˶�����ˮ�»��������ָ��ӵķ�����ϵͳ���б�ʶ��������Ҫ�����������ʵ�ü�ֵ���������߲���һ�����͵Ķ�̬�����磬�����翼���˸������������Ԫ�ķ�����Ϣ��������źŴ�������Ӱ�죬���ҽ�GA�㷨��BP�㷨����������Ȩֵ��������������˵�������������������ٶȼ����ȡ�
1 ��̬������ģ��
ǰ��������ʵ�ֵ��Ǿ�̬ӳ�䣬û���ӳ��ߵİ��������ܱ�ʾ��̬ϵͳ��ӳ���ϵ����ʹ�Զ�̬ϵͳ�ķ���Ҳ���Բ��ô��ӳٵ�ǰ������[3](TDNN)��ʵ�֣������ֻ������ռ�����ع�����TDNNֻ�з����������Ӧ�����������ع�����(RNN)���з����������Ӧ����������ʹ��RNN�ܷ�����߽Ķ�̬ϵͳ[4]��RNN�ڽ���״̬�������ʵ�������˶��źŽ��м�Ȩ����ƽ�����������ã���ˣ�RNN�����;���һ�����˲�������RNN����ͬ�������Ķ�̬ϵͳ��Ҫ���ٵĽڵ�����ӣ����ṩ���������������ʵ���������塣
�������ڳ��õ�Jordan�����Elman������ŵ㣬������ͼ1��ʾ������ģ�ͽṹ���ýṹ�����2��������ص㣬�������������������ṹ�㣬�����������ʷ����״̬���䣬���ڲ�ͬ�������źſ��Ե�����ȥ���źŶ�����ֵ��Ӱ�졣��������ֵ����������㣬�������ֵ���������硣
ʽ(1)~(4)�ֱ��ʾ�����㡢�����㡢��������������Ĺ�ϵ��
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() ��m��k��r (4)
��m��k��r (4)

ͼ1 �Ľ��Ķ�̬������ṹ
Fig.1 Structure of improved dynamic neural network
2 ���ѧϰ�㷨
2.1 BP�㷨���Ľ�
����BP(Back Propagation)ѧϰ�㷨���нṹ���㷨�����Ҿ��к�ǿ�ķ�����ӳ�����������ǰ�����������½�����������ֻҪѧϰ�����ʵ�[5]��������Ч�ʺܸߡ�
���������������Ŀ�꺯��E��
![]() (5)
(5)
����![]() ��
��
�����㵽�����㣺
![]() (6)
(6)
����㵽�����㣺
![]() (7)
(7)
�����㵽�����㣺
![]() (8)
(8)
![]() (9)
(9)
![]()
![]() (10)
(10)
ʽ�У�i=1��2������m��j=1��2������n��q=1��2������r��
���BP�㷨�����ٶ����������¸Ľ���
![]() (11)
(11)
ʽ�У�![]() Ϊkʱ�̵ĸ��ݶȣ���Ϊ�������ӣ�0���ǣ�1����Ϊѧϰ�ʣ�����0��
Ϊkʱ�̵ĸ��ݶȣ���Ϊ�������ӣ�0���ǣ�1����Ϊѧϰ�ʣ�����0��![]() �����У�
������![]() ��
��
2.2 �Ŵ��㷨(GA)
�Ŵ��㷨��һ����������㷨����������ĵġ���ʤ��̭���������桱��һ�����������ԭ��������Ż������γɵı��봮Ⱥ���У����ڴ�Ⱥ�н�������֯��������Ŵ������������㷨�Ľ��У�������Ʒ�ʱ�������������ϣ��Ӷ��������ѵĸ���[6]��ֱ�����������һ�����������Ž⡣
����������
(1) ��ʼ����Ⱥ����������Ȩֵ�����ʵ������ɸ������
(2) ��Ӧ�ȱ任��ȡ��Ӧ�Ⱥ���Ϊ![]() �����������Ա任��
�����������Ա任��
![]() (12)
(12)
����![]() ��
��![]() ��
��![]() �ֱ�ΪȺ������С��ƽ����Ӧ��ֵ��
�ֱ�ΪȺ������С��ƽ����Ӧ��ֵ��
(3) ѡ�����Ӳ����������ط��������ѡ��
(4) ���������Ϊ�����̶ȱ�֤�����еĸ���Ķ����Ժ�����ģʽ���ȶ��ԣ�����������齻����������ý��湫ʽ�ͽ��������£�
![]() (13)
(13)
 (14)
(14)
ʽ�У�fmaxΪȺ���������Ӧ�ȣ�Pc1��Pc2Ϊ0��1֮��ij������˴�ȡPc1=0.85��Pc2=0.55��
��������������£����Ƚ��������Ӧ�Ȱ���������Ȼ�������尴һ��������Ϊ2�飬����Ӧ�Ƚϸߵ�һ���У�ȡ��Ӧ����ߵĸ�����Ϊ������������������ֱ𰴸��ʽ��棬ͬʱ������Ӧ����ߵĸ��塣����Ӧ�Ƚϵ͵�һ�飬�������ڸ��彻�淽ʽ��һ���汣֤������������ƽ�ȣ���һ���棬���ų�����Ӧ�Ƚϲ�ĸ���䷢��һ����Ӧ����Ըߵĸ���Ŀ��ܡ�
(5) ������������ø�˹���죬���ڸ�����������ԣ��ڸ���V�����ѡ��һ������Vk����Vk�����Ľ��������VkΪ��ֵ�ĸ�˹�ֲ���
2.3 ����GA��BP����㷨
BP�㷨��������һ������ݶ��½��㷨�����ڸ��ӵķ�����Ѱ�����⣬���ȱ��������������ֲ���Сֵ��GA��һ����������㷨�����ڸ��ʵ�������������ȫ�����ŵ㣬���������̲���BP�㷨�Ľ���ʽ������������ͻ��ʽ���ص㣬GA��ȱ������������һ���̶ȵ�ʱ��ͨ�����桢�������Ӳ���������Ӧ�Եĸ���ĸ�����������[7]���Ӷ������ٶ��ܵ���Լ����GA��BP�Ļ���㷨�У�GA�����������Ŀ��㣬������߳�ʼȨֵ��³���ԣ�BP�㷨�ٽ����������оֲ����������ȿ�����������ٶ����ܱ������ھֲ���С���Ӷ������ѧϰ�㷨��Ч�ʡ�
����GA��BP���ѧϰ�㷨�ľ��岽�����¡�
��1������ʼ����ģΪS����Ⱥ�����������ֱ��Ӧ�������Ȩֵ��
��2��������ÿ�����壬���������������������������������������������ۺ�������������������Ӧ��ֵ�������һ����Ӧ��ֵ���㾫��Ҫ�������ѧϰ�����������һ����
��3���������ط��������ѡ����Խ���ѡ��
��4�����Ը�����������Ӧ����ͱ�������õ���һ����Ⱥ��
��5������ÿһ��������һ�����ʽ���һ��BP������ȡ�����������Ÿ���һ������һ��BP������
��6����ѭ��������ת���2����
3 ˮ�»����˷����ʶ����
ˮ�»����������ʵ�����顣ˮ�»�����ʵ�����������������ѡ���ڳ���������Ϊ50 m��30 m��10 m����ά��������ѧģ��ʵ��Ҫ���Լ���ʵ�������ص����ƣ�ˮ�»�������Ҫ����״̬�ɿ���Ϊˮƽ����˶��ʹ�ֱ���˶�����Ƶ�����Ϊˮ�»���������Ƶ����ҵ�ѹ���뼤���µĶ���У��ɿ���ϵͳ����������������ָ��Զ����Ʋ��Ʊ�������ֱ�����ɼ���������������6��������������ָ��(���Ƶ�ѹ)�������ٶȺͺ����ٶȣ��Ի����˵�2����������ʩ�����ҵ�ѹ��ͬʱ��4����������(ǰ���2��)���뷽����ѹ����ּ���������ˮƽ����˶����ԡ������в�������Ϊ0.5 s����ˮ�»����˽����ȶ�����״̬��ʼ�������ﵽһ���������Ƚ���ʵ�顣�����͵õ�����ѵ���������ݡ�
����������̬�����������ˮ�»�����ϵͳ��ʶ�������飬2�����ƽ�����4�����ƽ�����ѹ��Ϊ�����������ݣ��������Ϊ�����ٶȡ������ٶȼ�ҡ�����ٶȡ�����������ڵ���ѡΪ10������Ⱥ��ģ150��ѵ������Ϊ0.02������ˮ�������õ�ʵ�����ݽ�������ѵ��ͼ2~4��ʾ�ֱ�Ϊ��������������ݼ�ѵ�������ȽϽ����
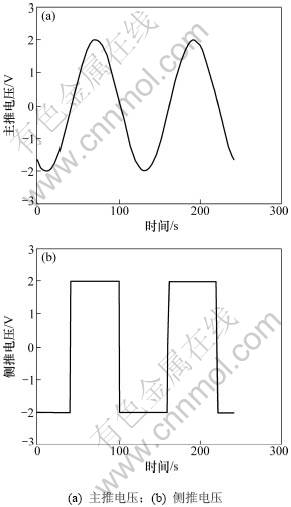
ͼ2 ������������
Fig.2 Inputs of neural network
������������֪�����ڵ����ɶȵ��˶���ʶ�����ü�ǰ����������ܴﵽһ��Ч���������ڶ����ɶ��˶�(�����������ʵ���˶������Ϊ�ӽ�)�����ھ��к�ǿ������ԣ����ڲ����Ը��ӣ�����BP����ѧϰ����ʶ��������1 000��ѧϰ�����������������ö�̬���粢�����Ŵ��㷨��BP�㷨��ϣ����������ٶȿ죬���ұ�ʶ���ȱȵ�һ����GAѧϰ�㷨�кܴ����ߡ�

ͼ3 ��������������������Ա�
Fig.3 Comparing between network outputs and simulation outputs
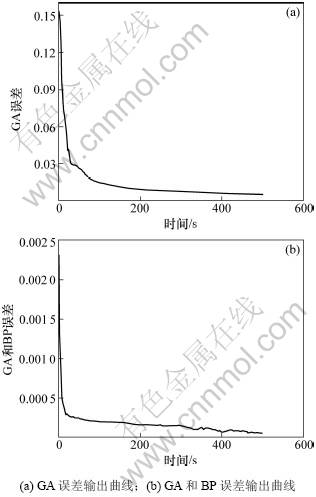
ͼ4 GA��GA&BP�㷨���Ա�
Fig.4 Error comparing between GA and GA&BP algorithms
4 ����
�ڸ�����̬�ع�������ģ�͵Ļ����ϣ�������þ��оֲ���������BP�㷨��GA�㷨���Ե����ƣ���������ѧϰ�㷨��ʵ����ǿ�����Զ�̬ϵͳ��ˮ�»����˵��˶���ģ���˷���ǰ��BP���������������������ٶ��������⣬��������˾��ȡ�
�ο����ף�
[1] ������, ����, ����,��. Ƕ��ʽ���ݿ���ˮ�»������е�Ӧ���о�[J]. ���������̴�ѧѧ��, 2008, 29(9): 897-901.
WANG Jian-guo, WAN Lei, GAN Yong, et al. Embedded database applied in underwater vehicles[J]. Journal of Harbin Engineering University, 2008, 29(9): 897-901.
[2] ������, ����ï. ������̬����Ӧ������ˮ�»�����ϵͳ���߱�ʶ[J]. ϵͳ����ѧ��, 2008, 20(8): 5006-5009.
ZHANG Ming-jun, HU Ming-mao. Online identification of autonomous underwater vehicle based on stable adaptive technique[J]. Journal of System Simulation, 2008, 20(8): 5006-5009.
[3] л����, ���ֳ�. ˮ�»����˶�̬ϵͳЭͬ��ģ�����о�[J].ϵͳ����ѧ��, 2007, 19(9): 2130-2133.
XIE Hai-bin, SHEN Lin-cheng. Collaborative modeling of underwater vehicle dynamic system[J]. Journal of System Simulation, 2007, 19(9): 2130-2133.
[4] Narendra K S, Parthasarathy K. Identification and control of dynamical system using neural networks[J]. IEEE Trans Neural Networks, 1990, 1(1): 4-27.
[5] YU Jian-cheng, ZHANG Ai-qun, WANG Xiao-hui. Direct adaptive control of underwater vehicles based on fuzzy neural networks[J]. Acta Automatica Sinica, 2007, 33(8): 840-846.
[6] Pepijn W J, Ven V D, Johansen T A, et al. Neural network augmented identification of underwater vehicle models[J]. Control Engineering Practice, 2007, 15(6): 715-725.
[7] ������, ���, ����, ��. ����S���ˮ�»����˿��������[J]. ��������ѧ��, 2009, 13(1): 144-147.
WANG Jian-guo, WU Gong-xing, WAN Lei, et al. Controller design of underwater robots based on generalized S-plane[J]. Elcetric, Achines and Control, 2009, 13(1): 144-147.
(�༭ �Կ�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(50579007)�����ҡ�863���ƻ���Ŀ(2008AA092301)���й���ʿ���ѧ����������Ŀ(20100480964)
ͨ�����ߣ�������(1983-)���У����ϳ����ˣ���ʿ������ˮ�º��������ܿ��ƺ�ϵͳ�����о����绰��13277036071��E-mail��wjg103@126.com
ժҪ�����Jordan��Elman��������ŵ㣬����һ�����͵Ķ�̬�����硣�������Ŵ��㷨(GA)�������㷨(BP)�Ļ���㷨�����������Ȩֵ������Ϊ����������ٶȣ�����ϵͳ���ھֲ���Сֵ�����Ľ���������Ӧ����ˮ�»�����ϵͳ��ģ���������������������ܶ����������ʷ״̬���м��䣬��ʵ�����ߵ�����ʷ�źŶԵ�ǰֵ��Ӱ�죬���������������ڵ�ķ�������ǿ��������źŴ������������ڻ���㷨�������������ѧϰ�������ٶȺͱ�ʶ���ȡ�
