
���Ӵ���ȫ�۲�����������ȷ������
�ɹ���1, 2���ߺ���1���� Ϊ1��������1��������1
(1. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083��
2. �й���������������ҵ���Ź�˾��������100035)
ժ Ҫ��
ժ Ҫ��Ϊ������첽������Ӵ����۲⾫�ȣ���С�۲�����������й������¶ȡ�Ƶ�ʺʹ�·�����ص�Ӱ�죬ʹ�ö��Ӵ���ȫ�۲����۲ⶨ�Ӵ��������þ�ֹ����ϵ�µ��첽�����ѧģ�ͣ���������������ı�ʱ����������״̬�¶��Ӵ����۲���u-iģ�ͺ͵�������״̬��i-nģ�͵Ĺ۲����仯�����Ȼ��������Ӵ���ȫ�۲�����������ȷ����������Matlab/Simulink���滷���£������˷�����֤���о�������������Ӵ����۲⾫����Ҫ�����ŵ�������й�����ת�ٺ�ת�صı仯���仯�����ô˷����ڱ�֤�۲����ȶ���ǰ���£����ݲ�ͬ��ת�����䣬ѡ����ʵĹ۲����������ã���������첽���ȫ������״̬�¶��Ӵ����Ĺ۲⾫�ȣ����ô˷�����Ч�������ȫ�ٷ�Χ�ڶ��Ӵ����Ĺ۲⾫�ȣ�����ʵ�ּ�
�ؼ��ʣ�
��ͼ����ţ�TM301.2 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2008)04-0793-06
A method to determine gain matrix of stator flux full order observer
XI Guo-hua1, 2, GAO Hong-yang1, XU Wei1, YU Shou-yi1, GUI Wei-hua1
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. China Northern Locomotive & Rolling Stock Industry (Group) Corporation, Beijing 100035, China)
Abstract: In order to improve observation accuracy of the stator flux and minimize observation error which is influenced by temperature, frequency and magnetic path in motor operation process, a full order observer was presented. The change of observation error was analyzed in the case of stator flux observer u-i model at high speed and i-n model at low speed when the parameters of motor changed based on the mathematical model in the stationary coordinates. A method to determine the gain matrix of full order observer was presented. The results show that the error changes with the change of motor speed and torque. On the premise of assuring stability of the observer, according to different speed ranges, choosing the proper way to set the pole of observer, the method can be used to improve the observation accuracy of stator flux at high speed, and it is also validated in the Matlab/Simulink condition. It is shown that it can improve observer accuracy of the induction motor stator flux effectively.
Key words: induction motor; stator flux; full order observer
�������첽���ֱ��ת�ؿ���ϵͳ�ǽ����ڶ��Ӵų���������ϵģ�ȷ�Ĵų�������ڸ߾��ȵĴų��۲⡣Ȼ������������й������ܵ�������Ӱ�죬������ᷢ���仯����ҪӰ�������У��¶ȡ�Ƶ�ʡ���·���͵�[1]��
���첽���ֱ��ת�ؿ���ϵͳ�У�һ����ô����۲�����ͨ����ⶨ�ӵ�ѹ�͵����۲ⶨ�Ӵ��������ڶ��Ӵ����۲⾫���ܵ��������Ӱ��ϴ�������ı仯�����Ӵ����۲�������ӣ����ת�ع۲����Ҳ����֮���ӡ�
�����ô��е�ͨ�˲�����u-iģ�ͣ���Ȼ�ܽ��ͻ��ֻ��ڶ�ֱ�����Ļ������ã����ǣ����������Ƶ�ʽӽ�ת��Ƶ�ʦ�cʱ���������µķ�ֵ������λ�����ʹ����۲����ľ���[2]��������i-nģ�ͣ���Ȼʹϵͳ��������С�©��С�ת�ӵ����Ӱ��, Ȼ����i-n ģ���漰ת�ټ�ת�Ӳ�����³���Ա��ʸ�����ģ�;�������֤[3]��������ȫ��u-nģ�ͣ���Ȼ�����ۺ�ǰ2��ģ�͵��ŵ㣬����ģ��û�п������������ת�ؽ��Ƴɷ��ȵĶ���©��У��ʻ���ɿ���ϵͳ��ȷ���½�[4]������ʵ�ָ���[5]���ڴˣ��������߷������Ӵ���u-iģ�ͺ�i-nģ�͵Ĺ۲����͵�������Թ۲�����Ӱ�졣���ڶ��Ӵ���ȫ�۲������н�ǿ�Ŀ���������[6-7]���������Թ۲������ȺͶ�̬�����кܴ��Ӱ��[8-10]����ˣ����øù۲�������Ե�������й����в�����״̬�ı仯������һ��ȷ���������ķ�����ʹ�۲����Ե�������仯���кܺõ�³���ԡ�
1 �첽�綯����ѧģ��
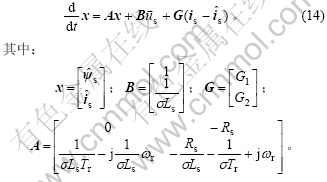
�ھ�ֹ����ϵ�£��첽�綯����ѧģ�͵Ŀռ�ʸ��������ʽΪ

������ķ����У����д���![]() ���IJ�����ʾ�۲�ģ���в��õIJ�������������������
���IJ�����ʾ�۲�ģ���в��õIJ�������������������![]() ���IJ�����ʾ���ʵ�ʵIJ�������������
���IJ�����ʾ���ʵ�ʵIJ�������������
2 ���Ӵ���u-iģ�͵�������
��ʽ(1)�ö��Ӵ���u-iģ�ͣ�
![]()
��ʽ(6)���Կ�����u-iģ�ͷdz������ӵ�ѹ�͵��������ڼ�⣬�ڼ�����������õ��ĵ������ֻ�ж��ӵ��衣
������㶨�ӵ���ϴ�ʱ��u-iģ�۲�ֵ![]() ��Ӱ�졣��ʽ(6)��u-iģ�۲�ֵ
��Ӱ�졣��ʽ(6)��u-iģ�۲�ֵ![]() ��ʵ��ֵ
��ʵ��ֵ![]() ֮�ȣ�
֮�ȣ�

��ʽ(1)~(4)�ã�
��ʽ(8)����ʽ(7)������ã�

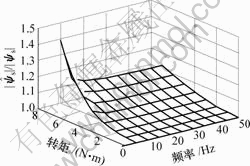
����Matlab/Simulink ���湤�߿��Զ�������Rs�Զ��Ӵ����۲�����Ӱ�졣��綯���������£������Ϊ1.5 kW���ת��Ϊ1 440 r/min���ת��Ϊ8 N?m��RsΪ4.25 ?��RrΪ0.24 ?��LmΪ0.651 H��LsΪ0.666 H��LrΪ0.671 H��pΪ2��ת������JΪ0.02 N?m2��Ϊ��֤���Ӵ�����ֵ���䣬����ں�ѹƵ�ȷ�ʽ�����У������ǵ綯����Ħ�������أ���![]() ʱ�����������ͼ1��ͼ2��ʾ��
ʱ�����������ͼ1��ͼ2��ʾ��
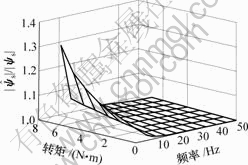
ͼ1 ![]() ʱ�����Ӵ�����ֵ֮��
ʱ�����Ӵ�����ֵ֮��
Fig.1 Ratio of stator flux when ![]()
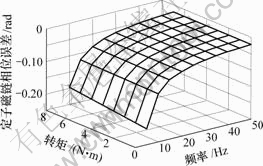
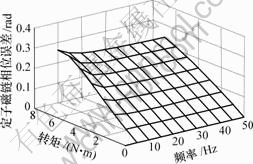
ͼ2 ![]() ʱ�����Ӵ�����λ���
ʱ�����Ӵ�����λ���
Fig.2 Phasic error of stator flux when ![]()
��ͼ2���Կ������綯���ڶת�ٵ�30%����������ʱ�����Ӵ����۲�ֵ��ʵ��ֵ������ͬ�������綯���ڶת�ٵ�30%��������ʱ�����Ÿ���ת�ص����ӣ����Ӵ����۲�ֵ![]() ��ò�ȷ��������Ƶ��Ϊ5 Hz��ת��Ϊ7 N?mʱ�����Ӵ����۲�ֵ
��ò�ȷ��������Ƶ��Ϊ5 Hz��ת��Ϊ7 N?mʱ�����Ӵ����۲�ֵ![]() �ķ�ֵԼΪʵ�ʷ�ֵ��1.3����������Ƶ��Ϊ5 Hz��ת��Ϊ0 N?mʱ�����Ӵ�����λ���ﵽ-0.2 rad����-11.5?��
�ķ�ֵԼΪʵ�ʷ�ֵ��1.3����������Ƶ��Ϊ5 Hz��ת��Ϊ0 N?mʱ�����Ӵ�����λ���ﵽ-0.2 rad����-11.5?��
��ˣ�������ڶת�ٵ�30%����������ʱ����u-iģ�۲�����Ӵ����ķ�ֵ����λ����С�����Ժ��Բ��ơ����ڶת�ٵ�30%����ʱ�����ӵ��跢���仯������ϴ�Ĺ۲���
3 ���Ӵ���i-nģ�͵�������
��ʽ(3)��(4)�ã�
��ʽ(2)��(4)�ã�
![]()
��ʽ(10)��(11)��ϳɶ��Ӵ���i-nģ�ͣ�ģ�Ϳ�ͼ��ͼ3��ʾ����ʽ(10)��(11)�ã�
![]()
�ʶ��Ӵ����۲�ֵ��ʵ��ֵ֮��Ϊ��


ͼ3 ���Ӵ�����i-nģ�Ϳ�ͼ
Fig.3 Frame of stator flux i-n model
����Matlab/Simulink��������������Tr�仯�Զ��Ӵ�����Ӱ�졣![]() ʱ��������ͼ4��ͼ5��ʾ�����Կ�����Tr�Զ��Ӵ����۲�ֵ��Ӱ����Rs��Ӱ�����ơ����Ӵ�������λ������Ÿ���ת�ص����Ӷ���������ת�ٹ�ϵ����Ƶ��Ϊ5 Hz��ת��Ϊ7 N?mʱ�����Ӵ����۲�ֵΪʵ��ֵ��1.44������λ���Ϊ0.30 rad����17.2?��
ʱ��������ͼ4��ͼ5��ʾ�����Կ�����Tr�Զ��Ӵ����۲�ֵ��Ӱ����Rs��Ӱ�����ơ����Ӵ�������λ������Ÿ���ת�ص����Ӷ���������ת�ٹ�ϵ����Ƶ��Ϊ5 Hz��ת��Ϊ7 N?mʱ�����Ӵ����۲�ֵΪʵ��ֵ��1.44������λ���Ϊ0.30 rad����17.2?��
ͼ4 ![]() ʱ�����Ӵ�����ֵ֮��
ʱ�����Ӵ�����ֵ֮��
Fig.4 Ratio of stator flux when ![]()
ͼ5 ![]() ʱ�����Ӵ�����λ���
ʱ�����Ӵ�����λ���
Fig.5 Phasic error of stator flux when ![]()
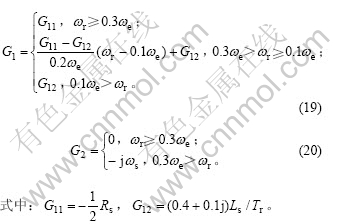
4 ���Ӵ���ȫ�۲�����������ȷ��
���Ӵ���ȫ�۲�������ʽΪ[12]��
�������G�Դ����۲������ȺͶ�̬����Ӱ�켫��[11-14]��һ����ݹ۲����ľ�̬�����켣���㼫��ֲ���ȷ����
���Ӵ����۲����ĵ�ѹģ�����и���ʱ�����Ӵ����۲�ֵ�ķ�ֵ����λ����С��Ϊ��ʹ���Ӵ���ȫ�۲��������ڵ�ѹģ���£���������![]() ����ʽ(14)�ĵ�1�еã�
����ʽ(14)�ĵ�1�еã�
![]()
�ڵ���ʱ���Ӵ����۲����ĵ���ģ�ͣ�³���Խ�ǿ�������ֲ���ѹģ�͵�ȱ�ݡ���ˣ�Ϊ��ʹ���Ӵ����۲��������ڵ���ģ���£���ʽ(14)��1�к͵�2���еı���![]() ����������Եõ�����
����������Եõ�����![]() ��ϵ��Ϊ
��ϵ��Ϊ
![]()
��![]() ϵ����Ϊ0���ã�
ϵ����Ϊ0���ã�

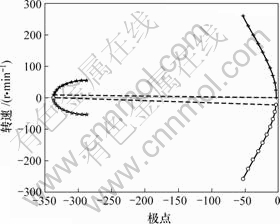
���Ӵ����۲����к��е����ת�����r��ת���ڵ�������й������Dz��ϱ仯�ģ���ˣ�������ֵҲ�Dz��ϱ仯�ġ�ͼ6��ʾΪ���ת�ٴ�0���ӵ��ת��ʱ������A����ֵ�ı仯���ߡ�
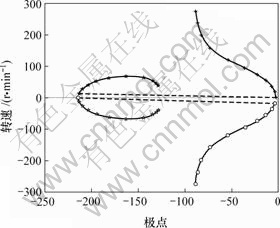
ͼ6 ���Ӵ����۲���������ת�ٵı仯����
Fig.6 Curves of pole of stator flux observer when
it varies with rotation speed
��ͼ6���Կ������۲����ļ����ǹ�����㣬���Ӧ������˥���ġ�����ֵ��ʵ�������۲������ȶ��ԺͿ�����[15-19]��Ϊ��ͬʱ����۲��������Ժ��ȶ��Ե�Ҫ�۲�������ʵ���ľ���ֵ����̫���鲿��ʵ��֮��Ϊ���������ϵ����Ҳ��Ӱ��ù۲�����ﵽ��̬�Ĺ���ʱ�䡣
ͼ7��ʾΪ���ӵ������¶�����1��ʱ�����Ӵ����۲���������ת�ٵı仯���ߡ���ͼ7���Կ�����2������Զ�����ᣬ��2�����㿿�����ᡣ��G1ʵ���ľ���ֵ�ϴ��������ʹ���������2�������һ�������ƶ�������ȫ�۲������ȶ����ۺ����Ϸ�����֪������������仯ʱ���ڱ�֤�۲����ȶ��Ե�ǰ���£��ɵó���������ȷ������(��ʽ(19)��(20))��
ͼ7 ���ӵ������¶�����1��ʱ�����Ӵ����۲���������ת�ٵı仯����
Fig.7 Curves of pole of stator flux observer with rotation speed when stator resistance increases double with temperature
����ʽ(19)��(20)ȷ�����Ӵ���ȫ�۲����������������Matlab/Simulink���湤�ߣ��õ�![]() ��
��![]() ʱ�Ľ������ͼ8��ͼ9��ʾ�����Կ��������Ӵ����۲�ֵ���ֵֻ��ʵ��ֵ��1.2���������λ���ֻ��-0.1 rad����-5.7?�������ԭ����1.4����-17.2?���۲⾫����ߣ��������ַ�������ʵ�֡�
ʱ�Ľ������ͼ8��ͼ9��ʾ�����Կ��������Ӵ����۲�ֵ���ֵֻ��ʵ��ֵ��1.2���������λ���ֻ��-0.1 rad����-5.7?�������ԭ����1.4����-17.2?���۲⾫����ߣ��������ַ�������ʵ�֡�
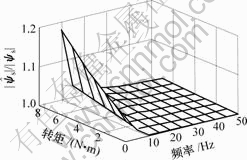
ͼ8 ![]() ��
��![]() ʱ�����Ӵ�����ֵ֮��
ʱ�����Ӵ�����ֵ֮��
Fig.8 Ratio of stator flux when ![]() and
and ![]()
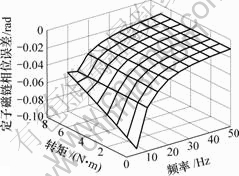
ͼ9 ![]() ��
��![]() ʱ�����Ӵ�����λ���
ʱ�����Ӵ�����λ���
Fig.9 Phasic error of stator flux when ![]() and
and ![]()
5 �� ��
a. �첽���ֱ��ת�ؿ���ϵͳ�����۲�������涨�ӵ���Rs��ת��ʱ�䳣��Tr�仯�����ӣ��ر����ڵ�������ʱ��Rs��Tr�仯���Խ��Ͷ��Ӵ����۲�ֵ�ķ�ֵ����λ���ȡ�
b. ���Ӵ���ȫ�۲����������Թ۲����ľ��ȺͶ�̬����Ӱ��ϴ�һ����ü������õķ�����ȷ����
c. ����ת��ֵ�������䲻ͬ��ѡ���Ӧ�����������ʹ�����۲����ļ��������ڽϺ�λ���ϣ��Ӷ����͵�������仯�Դ����۲⾫�ȵ�Ӱ�졣
�ο����ף�
[1] �ǿ. ʸ�������첽�����Ч��·��������仯���ط���[J]. �人��ͨ�Ƽ���ѧѧ��, 1999, 23(5): 469-472.
LI Han-qiang. The analysis of equivalent circuit and parameters variations of vector control in induction motor[J]. Journal of Wuhan Transportation University, 1999, 23(5): 469-472.
[2] �����, ��濾�, ����ܿ. ���ڵ�ѹģ�͵Ķ��Ӵ����۲�����������Ʒ���[J]. ��������, 2006, 36(3): 15-18.
WAN Yu-bin, HU Chan-juan, WAN Shu-yun. Stator flux linkage estimator and parameter design method based on voltage model[J]. Electric Drive, 2006, 36(3): 15-18.
[3] Habetler T G. Stator resistance tuning in a stator flux-oriented drive using an instantaneous hybrid flux estimator[J]. IEEE Trans Power Electron, 1998, 13(1): 125-132.
[4] ��˫Ӣ, �Ű���. һ�ָĽ��첽�綯�����Ӵ����۲������о�[J]. ��������ѧ��, 2005, 9(6): 547-549.
FAN Shuang-ying, ZHANG Ai-ling. Study of asynchronous machine with an improved of stator flux observatory[J]. Electric Machines and Control, 2005, 9(6): 547-549.
[5] Τ����, ����ΰ, ����, ��. һ��������ѹ�ʹ����۲�����ֱ��ƫ�������·���[J]. �廪��ѧѧ��: ��Ȼ��ѧ��, 2001, 41(9): 51-54.
WEI Li-xiang, LIU Cong-wei, SUN Xu-dong, et al. New integral error correction method for rotor flux identification of AC drives[J]. Journal of Tsinghua University: Science and Technology, 2001, 41(9): 51-54.
[6] Marko H, Jorma L. Parameter sensitivity of full-order flux observers for induction motors[J]. IEEE Trans Ind Application, 2003, 39(4): 1127-1135.
[7] л����, �²�ʱ. �첽������Ӵ����ļ�ӹ۲ⷽ��[J]. ��������, 1999, 29(1): 11-15.
XIE Hong-ming, CHEN Bo-shi. Indirect stator flux linkage calculation methods of induction motor[J]. Electric Drive, 1999, 29(1): 11-15.
[8] Tajima H, Guidi G, Umida H. Consideration about problems and solutions of speed estimation method and parameter tuning for speed sensorless vector control of induction motor drives[J]. IEEE Trans on Industry Application, 2002, 38(5): 1282-1289.
[9] ���, ʢ�ನ, ������, ��. �첽�����ת�Ӳ����ı�ʶ�����о�[J]. �繤����ѧ��, 2006, 21(1): 70-74.
LI Jian-jun, SHENG Jie-bo, GUI Wei-hua, et al. Research on parameter identification method for induction motor[J]. Transactions of China Electrotechnical Society, 2006, 21(1): 70-74.
[10] Casadei D, Serra G, Tani A. Analytical investigation of torque and flux ripple in DTC schemes for induction motors[C]//IEEE IECON��97, 1997: 552-556.
[11] Beno?t R, Fr��d��rique B, Gregory C, et al. A methodology to determine gains of induction motor flux observers based on a theoretical parameter sensitivity analysis[J]. IEEE Trans Power Electronics, 2000, 15: 983-995.
[12] �ɹ���, ���ƽ, ������, ��. �첽������ٶȴ�����ֱ��ת�ؿ���ϵͳ[J]. �й��������ѧ��, 2007, 27(21): 76-82.
XI Guo-hua, SHEN Hong-ping, YU Shou-yi, et al. Speed sensorless direct torque control system of asynchronous motor[J]. Proceedings of the CSEE, 2007, 27(21): 76-82.
[13] �� ��. ��������ϵͳģ�Ͳο�����Ӧ���Ƽ���[D]. ��ɳ: �����Ƽ���ѧ���繤�����Զ���ѧԺ, 2004.
HU Kai. MRAS based contral method for induction motor drivers[D]. Changsha: School of Mechanical and Electrical Engineering and Automation, University of Defense Science and Technology, 2004.
[14] �� ��, ������. �����ٶ�����Ӧ�����۲�����ֱ��ת�ؿ����е�Ӧ��[J]. ���ϴ�ѧѧ��, 2001, 33(4): 103-107.
LI Lei, HU Yu-wen. The application of new type of speed adapt flux observe to direct torgue contral[J]. Southeast College Transection, 2001, 33(4): 103-107.
[15] ֣��, ������, ����. �첽���ȫ������Ӧ�����۲���ٶȱ�ʶ�о�[J]. ��������, 2006, 36(7): 7-10.
ZHENG Ze-dong, LI Yong-dong, WANG Chen-chen. Study of adaptive flux observer and speed identification method for induction motor[J]. Electric Drive, 2006, 36(7): 7-10.
[16] ���й�, ������, �콨��. ����ͬ����ʱ����任���������������[J]. ���Ϲ�ҵ��ѧѧ��: ��Ȼ��ѧ��, 2003, 34(5): 555-558.
GUO You-gui, YU Shou-yi, ZHU Jian-li. The input and output properties of a matrix converter with different loads[J]. Journal of Central South University of Technology: Natural Science, 2003, 34(5): 555-558.
[17] LI Zhen, XU Long-ya. A mutual MRAS identification scheme for position sensor-less field orientation control of induction machines[C]//IEEE Industry Applications Conference Thirtieth IAS Annual Meeting. IAS��95, 1995: 159-165.
[18] ���ϼ�, ����, ʷ乜�. �������Ͷ��Ӵ����۲�����ֱ��ת�ؿ���[J]. �й��������ѧ��, 2005, 25(24): 137-143.
JIN Men-jia, QIU Jian-qi, SHI Ceng-wei. A novel startor flux estimator for direct torque controlled magnet synchronous motor drives[J]. Proceedings of the CSEE, 2005, 25(24): 137-143.
[19] �� ÷, ���Ķ�, ��̩ɽ, ��. ˫������任�������첽�綯�������Է���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2005, 36(4): 658-663.
SU Mei, XU Xin-dong, ZHANG Tai-shan, et al. Performance analysis of two-stage matrix converter driven asynchronous motor[J]. Journal of Central South University: Science and Technology, 2005, 36(4): 658-663.
�ո����ڣ�2007-09-17�������ڣ�2007-12-21
������Ŀ�����ҡ�863���ƻ�������Ŀ(2006AA042181)
ͨ�����ߣ�������(1940-)���У������ϲ��ˣ����ڣ���ʿ����ʦ, ��������Ӧ���ơ����̿��ƺͽ�������������Ӧ�õ��о����绰��0731-8836739��E-mail: s_yushouyi@sina.com
