
���ڶ���ѧ��������Ĵ�ʽ�ɿ����ߴ���
������1, 2�����پ�1, 2
(1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ�� 410083��
2. ������Դ�������ü��������ص�ʵ���ң����� ��ɳ��410012)
ժ Ҫ��
�������ԵĻ����ϣ�����������ģ�⺣�࣬�õ���Ĵ�ʽ�ɿ�ǣ�����ʹ���֮��Ĺ�ϵ��ǣ������������Ӷ������С�������ȶ���30 kN��ͨ��������������ѹʵ������ת��������ˮ���������۷����������Ĵ�ʽ�ɿĶ���ѧģ�ͣ�����˲ɿ�ֱ������ʱ����iӦ��20%�Ŀ���Ҫ����ƴ�ģ��PID�������Ĵ��ʿ���ϵͳ������Simulink�������Կ���ϵͳ���з��档����������������ƵĴ���ϵͳ�ܹ�������Ĵ�ʽ�ɿ����߿���Ҫ���ʿ�����Ӧ�ٶȿ졢��̬�Ժã���֤�ɿ����õĶ������ܡ�
�ؼ��ʣ�
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2013)08-3166-07
Slip control of deep sea tracked miner based on dynamic analysis
HAN Qingjue1, 2, LIU Shaojun1, 2
(1. College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. National Key Laboratory of Development and Utilization of Deep-Sea Mineral Resource, Changsha 410012, China)
Abstract: Based on the analysis of the characteristic of the surface soil on the deep-sea bed, the relationship of the traction force and slip rate of the deep sea tracked miner is obtained. As the slip rate increases, the traction force decreases sharply. Also, the dynamic model of the tracked miner is established taking the bulldozing resistance, compaction resistance, steering resistance and water resistance in account. More importantly, a slip rate control system with a fuzzy PID controller is designed. By using Simulink software, a series of simulations are carried out to test the controller. As shown in the results, the slip rate controller is of fast and stable response, therefore, the validity of the controller is confirmed and can meet the control requirement, which is no more than 20%, and the dynamic performance of the deep sea tracked miner is ensured.
Key words: deep sea; tracked miner; slip rate; slip control
�Ĵ�ʽ�����������������еĽṹ�ص㾭�����㷺Ӧ���ھ��¡�ũҵ�Լ��ɿ������·�滷������[1]�������6 km�������˼��ܽ�Dzɿ�������ԣ��¹���ӡ�ȡ��������й����ڶ���ң�������Ƴ��˰��������Ĵ�ʽ�ɿ���ɿ�ϵͳ����ɿ�Ĺ���������Ϊ���⡣��������ѧ����ֱ��Ӱ�쵽�ɿ��������ܡ�Zvi��[1]�����Ĵ��������������۽�ģ�ͷ���������ģ�ͽ���Ӧ��һ��½�أ�����������⸴�ӻ����µ��Ĵ�������ʻ��ѧ���о�ȱ���о��������·�泵����ʻ������ѧ��Bekker[2]���ȷ������Ӧ�������λ��֮���ϵ��ʵ�鷽�����¹���Schulte��[3]ͨ��ģ�⺣��ij��ݺͼ���ʵ�飬����˼���Ӧ�������λ��֮��Ĺ�ϵ�����ϴ�ѧ��������[4]����������ģ���ҹ�������������ԣ�ͨ��ʵ��õ����ҹ�����㺣��ļ���Ӧ����λ�ƹ�ϵ�������о��������Ĵ��������ʹ�֮��Ĺ�ϵ��������Ĵ��ɿ����߹�������������������δ�����漰���ɿ������߹����л��ܵ����Ժ��׳������ѹʵ����������������ת�������Լ�ˮ��������֮�������������ܵ���������Ӱ�졣��Щ��������Ĵ�ʽ�ɿ����߹��̶���ѧ�����о����Ǽ�����Ҫ�ģ���Ҳ�DZ����о����ص�֮һ����Ĵ�ʽ�ɿ����߶�����ͨ���Ĵ���Ե�������ļ�������õģ�����ֱ��Ӱ�쵽�ɿ���ʻ���ܡ���ͳ½�س����Ĵ��Ʒ�����Ҫ�����ŷ���PID���Ʒ���ģ�����Ʒ��Լ���ģ���Ʒ�[5-6]��Herzog��[7]������������Ĵ��������ƽ�����ʵ���о���ȱ��һ�������۷������������߶���Ĵ�ʽ�ɿ����߹����д��ʽ����˿����о���ͨ��ģ�⺣������ԣ�����ҹ�����㺣��ļ���Ӧ����λ��֮��Ĺ�ϵ���õ�����Ĵ�ʽ�ɿ�ǣ�������֮��Ĺ�ϵ��ͨ������Ĵ�ʽ�ɿ����߹��̵Ķ���ѧ��������ɿ��ʵĿ���Ҫ��(i��20%)���������ģ��PID����ϵͳ���Դ��ʽ��п��ơ��������������ɿ����߹��̴��ʿ����������Ҫ��ȷ�������������Ĵ�ʽ�ɿ���ʻ���ܡ�
1 �ɿ�����ѧ�����о�
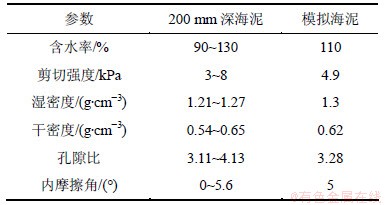
�ҹ���Ĵ�ʽ�ɿ�����ʱ�Ĵ��ݴﵽ200 mm��ĺ���㡣Ϊ��ģ��ò㺣�������ѧ���ԣ�ѡȡ��������ˮ��һ���ı��������Ϊģ�⺣�ࡣ��1��ʾΪ�����200 mm�����ģ�⺣���������ѧ���ԡ�
��1 200 mm�����ģ�⺣����ѧ����
Table 1 Parameters of surface soil under 200 mm deep-sea bed and simulating soil
����Wong[8]�ij���������ѧ���ۣ��������ṩ��������Ϊ��
 (1)
(1)
���У�F1Ϊ������������bΪ�Ĵ����ȣ�lΪ�Ĵ��ӵس�����Ϊ��������ǿ�ȣ�xΪ�Ӵ����Ĵ�ǰ�˾��롣
������[4]ͨ��ʵ������ģ�⺣�����Ӧ����λ�ƵĹ�ϵ����ʽ��
 (2)
(2)
���У���Ϊˮƽ����Ӧ����jΪ�Ĵ�ǰ�˽Ӵ������ļ���λ�ƣ�j=ix��iΪ���ʣ���maxΪ������Ӧ������rΪ�������Ӧ����k1=55��k2=3��
��ʽ(1)��(2)���Եõ���Ĵ�ʽ�ɿ��Ĵ���ǣ�����ļ���ʽΪ��
 (3)
(3)
ʽ�У�F2Ϊ�Ĵ���ǣ������ȡģ�⺣��������Ӧ����max=4.9 kPa���������Ӧ����r=1.4 kPa��ͬʱ�������ҹ�1 000 m����ϵͳ��Ĵ��ɿ���Ʋ���(����2)�����Եõ���ɿ��Ĵ���ǣ��������ʽΪ��
 (4)
(4)
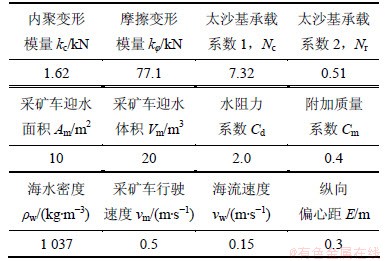
��2 ����ϵͳ�ɿ���Ҫ��Ʋ���
Table 2 Design parameters of miner

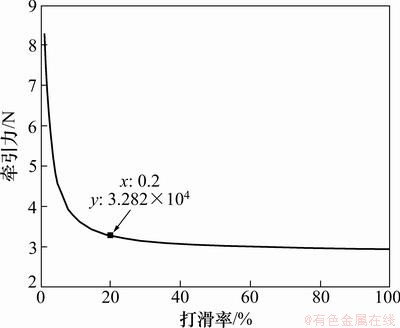
��ʽ(4)���Ի��Ƶõ���Ĵ�ʽ�ɿ��Ĵ���ǣ���������֮��Ĺ�ϵ���ߡ�
��ͼ1��֪����ģ����׳��������ǿ��Ϊ4.9 kPaʱ���ɿ��Ĵ�ǣ�������Ŵ��ʵ����Ӷ������С�������ʴ���20%ʱ��ǣ���������ȶ���30 kN������Ϊʹ�ɿ���������ʻ�����ʻ�����о������õĶ������ܣ���Ҫ�Բɿ��ж���ѧ���������������߹��̵Ĵ��ʽ��п��ơ�
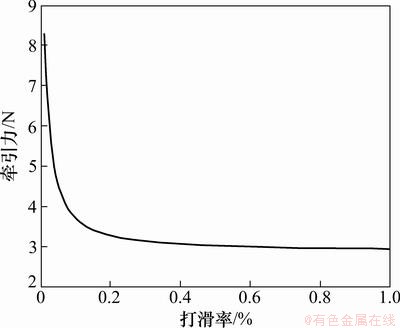
ͼ1 ǣ��������ʵĹ�ϵ
Fig. 1 Relationship between tractive force and slip rate
2 ����ѧģ��
��Ĵ�ʽ�ɿ����Ĵ�����ʽ�������������Ĵ����Ĵ��ܡ������֡��Ž������Ž�װ�á�֧���֡������֡�����װ�õȣ��������˼�������ں����Զ�������ҵ��2���Ĵ��ֱ�ѡ��Һѹ���������������ٶȲ�ʵ�ֲɿ�ת��
��Ĵ�ʽ�ɿ��ں���ֱ�й����У��䵥���Ĵ��Ķ���ѧ����Ϊ��
 (5)
(5)
 (6)
(6)
ʽ�У�JΪ�Ĵ������������ת���ת����������lΪ�Ĵ���ת�����ٶȣ�TwΪ�����Ĵ�Һѹ������������أ�FLΪ������Ĵ���ǣ������RΪ�����ְ뾶��MiΪ��Ĵ�ʽ�ɿ���ģ��������vΪ�Ĵ��ٶȣ������������ٶȣ�Rb��Rc�ֱ�Ϊ�Ĵ��ܵ�������������ѹʵ������FwΪˮ������
3 ��ҵ�����µ���������
3.1 ѹʵ����
�Ĵ�ʽ�ɿ���ʻ�ں���ϡ���������ϣ����ݽϴ��ɱ���ؽ������ϴ��ѹʵ����������������ѹʵ�����������й�ʽ�õ�[9]��
 (7)
(7)
���У�kc��k���ֱ�Ϊ�ھ۱���ģ����Ħ������ģ���� mΪ����������nΪ�����Ĵ�֧��������bΪ�Ĵ����ȣ�pΪ�Ĵ���ھࣻDΪ֧����ֱ����
3.2 ��������
�����������ɲο�����[10]�õ���
 (8)
(8)
���У���Ϊ������ʪ�ܶȣ�zΪ��������Kc��K��Ϊ������ϵ�������У�
 (9)
(9)
 (10)
(10)
���Nc��N��Ϊ̫ɳ����������ϵ��[11]����������Ħ���Ǧ�2Ψһȷ������ͨ��̫ɳ��������ϵ������á�
3.3 ˮ����
ˮ���Ĵ�ʽ�ɿ��нϴ��ӭˮ�����ӭˮ�������ˮ�ܶȽϴ��Һ��״�����һ������������Щ���Բɿ���һ���Ķ���Ӱ�졣ˮ����������ˮ�������������Ե��Ӷ���[12]��

 (11)
(11)
���У�CdΪˮ����ϵ��(drag co-efficiency)��CmΪ��������ϵ������wΪ��ˮ�ܶȣ�AmΪ�ɿ�ӭˮ�����vm��vw�ֱ�Ϊ�ɿ���ʻ�ٶ��뺣���ٶȡ������ҹ���ɿ�ϵͳ�Բɿ������ٶȵ�Ҫ������0.5 m/s��Ϊ�ɿ����߿����ٶȣ����������ٶȸ����ҹ����������������ϵͳ1 000 m��������Ľ��ܣ�ԼΪ0.15 m/s��
3.4 ת������
�����Ĵ�ʽ�ɿ��ԣ���ת����ͨ�������Ĵ�������ʵ�ֵģ���ת��Ĺ���������ƫ�ĵĴ��ڵ���ת�������IJ�����ת��������ͨ����ʽ����õ�[13]
 (12)
(12)
ʽ�У�mΪ�Ĵ���������BΪ�Ĵ���࣬LΪ���峤�ȣ�EΪ����ƫ�ľ࣬����ϵ����ȡ0.23�����������������3��
�ɱ�1~3�ͼ���ʽ(7)~(12)���Եõ���Ĵ�ʽ�ɿ���ʻ�����ܵ�����ʻ����ԼΪ31 510 N����Ӧǣ��������ʹ�ϵ���߿�֪����ʱ�Ĵ���Ϊ29%�����ڲɿ�����ʻ�Ĺ����л����ܵ���֮�������������ܵ��������������Ĵ��Ĵ���Ӧ����һ�����������ʱ���ȡ20%��Ϊ�Ĵ�ʽ�ɿ��ʵĿ��Ʊ���
��3 �����������
Table 3 Parameters of resistance
ͼ2 ��������ʾ��ͼ
Fig. 2 Expected slip rate
4 �ɿ�Һѹ����ϵͳģ��
��Ĵ�ʽ�ɿ������Ĵ������߾�����Һѹϵͳ��ʵ�֡���Һѹϵͳ��һ��Һѹ��������ϵͳ���ɱ����á���Һ����������λ�ס�Һѹ�������ɣ���ͼ3��ʾ����ͨ���ı��Һ������������λ�ƣ������ı�Һѹ��б����ǣ�����Һѹ��·����������Һѹ�����ת�ٺͷ��Ӷ��ﵽ��Ĵ�ʽ�ɿ�ǰ�������˼�ת���Ŀ�ġ�
Һѹ����Ϊ��Ĵ�ʽ�ɿ��ṩ������Һѹ����ϵͳģ�͵�������Ϊ�������Ŀ��Ƶ����������ΪҺѹ��������ת�أ�ͨ�����Ʊ���������������Ͷ�Һѹ�������ת�صĵ������������������ֵ��������أ��Ӷ��ﵽ�����Ĵ��Ĵ��ʵ�Ŀ�ġ�
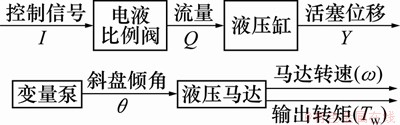
ͼ3 �ɿ�Һѹ����ϵͳ��ͼ
Fig. 3 Diagram of walking hydraulic system of miner
5 ����ϵͳ���
5.1 ����ϵͳ�ṹ
Ϊʹ�ɿ���ֱ����ʻ���̴����������Ҫ����ƴ�ģ��PID�������Ĵ��ʿ���ϵͳ������ϵͳ��ͼ4��ʾ��
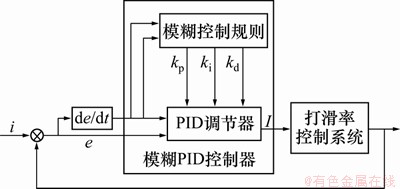
ͼ4 ģ��PID����ϵͳ��ͼ
Fig. 4 Fuzzy PID control system
��ģ��PID�������У����Ʊ���Ϊ����i�����ڱ���Ϊ�Ĵ�Һѹ����ϵͳ���������������I������ƫ��e�Լ�ƫ��仯�� ����ʵʱ���㣬����ģ����ϵ�ɵ�����PID�������IJ���kp��ki��kd��
����ʵʱ���㣬����ģ����ϵ�ɵ�����PID�������IJ���kp��ki��kd��
5.2 ģ��PID���������
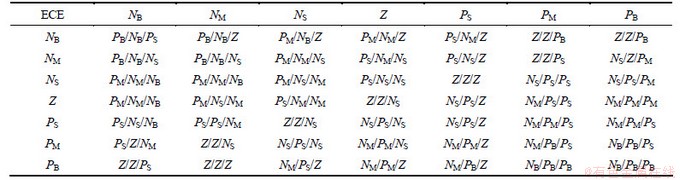
ģ�����Ƶ�����Ϊ���Ʊ���i��ƫ���Լ�ƫ��仯�ʣ����ΪPID�������IJ���kp��ki��kd��E��ECΪe����ģ��������KP��KI��KDΪģ�����������ǵ������Ϊ{��6��5��4��3��2��1��0}��ģ������Ϊ{PB��PM��PS��Z��NS��NM��NB}��ͼ5��ʾΪ����ģ�������������Ⱥ������ߡ�
��ģ��PID�������У�KP��KI��KDģ�������ɿ��ƹ���ó�����4������ģ������ģ�ͣ��ɱ�4��֪����|E|�Ƚϴ������£�����PD���ƣ����Դﵽ�ӿ���Ӧ�ٶȲ�����������̬�������ã���|E|���е�����£��Ա�֤���ƾ���ΪĿ�ꣻ����|E|��С������£�KP��KDȡ��ֵ���������ϵͳ���ȶ��ԡ�
�������ķ����з�ģ���������յõ�PID�������IJ���kp��ki��kd��

ͼ5 ��ģ�����������Ⱥ���
Fig. 5 Degree of membership of fuzzy variables
5.3 �������ģ��
���ڲɿ���ʻ�ڼ���ϡ���ĺ��ף������߹��̱�Ȼ����һ���Ĵ��ɿ��ʵļ����ͨ����ʽ�õ���
 (13)
(13)
�����ҹ���ɿ�ϵͳ�Բɿ������ٶȵ�Ҫ��vm=0.5 m/s��
��������ģ��PID����ϵͳ����Matlab/Simulink�н�������ģ�ͣ���ͼ6��ʾ����ϵͳ������Ϊ��������(20%)�����Ϊ��Ĵ�ʽ�ɿ������ֵ����ٶȡ�Һѹ����ģ�����ͼ3��������������ƪ����Һѹ����ģ�͵�Simulink��ģ���̲ο�����[14-15]���������ģ�����ʽ(13)������
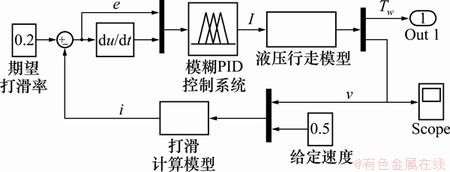
ͼ6 �����ͼ
Fig. 6 Simulink model
��4 KP��KI��KDģ������
Table 4 Fuzzy rule of KP, KI, KD
6 �������
ͼ7��8�ֱ�Ϊ���ʿ��Ʒ������ߺ��Ĵ�ʽ�ɿ��������ٶȷ������ߡ�
��ͼ7���Կ�������ģ��PID�������������£���Ĵ�ʽ�ɿ�ֱ����ʻ�����δ��ʽϸߣ���ߴﵽ54%��֮���ڿ�������������Ѹ�ٱƽ��������(20%)����Լ��0.65 s�ﵽ�ȶ�(20%)���˺�һֱ�ȶ���������ʸ��������Ͽ���Ҫ��
��ͼ8���Կ������ɿ��������������ٶ���0 m/sѸ������Լ��0.65 sʱ�ﵽ�ȶ����ٶ��ȶ���0.625 m/s���ң���Ӧ�ɿ��趨����ʻ�ٶ�0.5 m/s��֪�����ʻ����ȶ���20%���ҡ�ͼ8�ķ�������ͼ7���ʵı仯�����Ǻϣ��ɴ���֤���Ĵ�ʽ�ɿ�����Һѹ����ϵͳģ�͵���ȷ�ԡ�
���Ϸ���������������ϵͳ��ʹ��Ĵ�ʽ�ɿ�Ѹ���ȶ�����ѹ���״̬��ȷ���˲ɿ���ʻ�����еĶ������ܡ�
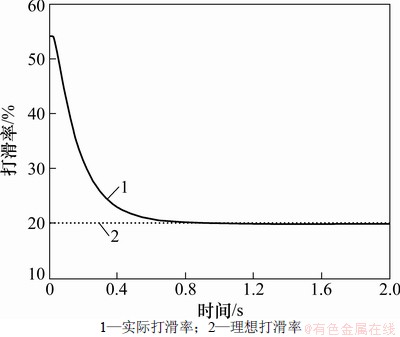
ͼ7 ���ʷ�������
Fig. 7 Simulation result of slip rate
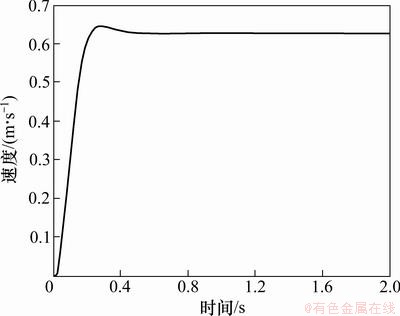
ͼ8 �������ٶȷ�������
Fig. 8 Simulation result of velocity of drive wheel
7 ����
(1) �����ҹ���ɿ��ض����������ѧ���Է������õ���Ĵ�ʽ�ɿ�ǣ���������֮��Ĺ�ϵ��ǣ������������Ӷ������С�������ȶ���30 kN��Ϊ�ҹ���ɿ���ѧ�����ṩ���ۻ�����
(2) �����������Ĵ�ʽ�ɿ���ѧģ�ͣ����ݲɿ�ǣ���������֮��Ĺ�ϵ��ͨ���Ը��������������ۼ��㣬����ɿ�ֱ�����ߴ��ʲ�����20%�Ŀ���Ҫ��
(3) ������Ĵ�ʽ�ɿ�����Һѹ����ϵͳģ�ͣ���Simulink����������˴�ģ��PID���Ƶ��Ĵ�ʽ�ɿ���ϵͳ��������ֱ�����߷��档�������������ɿ����ܿ��ٱƽ���Ч�Ŀ�����Ҫ��Χ�ڣ���̬�Ժã���֤�˲ɿ����õ����߶������ܡ�
(4) δ��������������������Ĵ��ɿ����߹��̶���Ӱ����о����Լ���ɿ�����ϵͳ�������̵ȷ�����о���
�ο����ף�
[1] Zvi S, William S, Minh H. Trajectory planning of tracked Vehicles[C]//Serate W. Proceedings of International Conference on Robotics and Automation. Los Angeles, 1993: 796-801.
[2] Bekker M G. Theory of land locomotion[M]. Michigan: Ann Arbor, University of Michigan Press, 1956: 350-380.
[3] Schulte E, Handschuh R, Schwarz W. Transferability of soil mechanical parameters to traction potential calculation of a tracked vehicle[C]//International Society of Offshore and Polar Engineers. Proceedings of the 5th ISOPE Ocean Mining Symposium. Tsukuba Japan: ISOPE, 2003: 123-131.
[4] ����, ������. ����㺣��ģ�⼰������ѧ�����о�[J]. ������ѧ, 2010, 27(11): 213-220.
LI Li, LI Shulin. Simulation and mechanical characteristics of terramechanics of the surface soil on deep-sea bed[J]. Engineering Mechanics, 2010, 27(11): 213-220.
[5] �ųɱ�, ���ǿ, ������, ��. �������������Ŀ��Ʒ����о�[J]. ��������, 2000, 22(5): 324-328.
ZHANG Chengbao, WU Guangqiang, DING Yulan, et al. A research on the control method of vehicle anti-slip regulation[J]. Automotive Engineering, 2000, 22(5): 324-328.
[6] FNA Zhejun, Yoram Koren, David Wehe. A simple traction control for tracked vehicles[C]//Proceedings of the American Control Conference, Washington, 1995: 1176-1177.
[7] Herzog K, Schulte E, Atmanand M A, et al. Slip control system for a deep-sea mining machine[J]. Journal of Automation Science and Engineering, 2007, 4(2): 282-286.
[8] Wong Y. Theory of ground vehicle[M]. Canada: John Wiley & Sons, Inc, 2001: 90-93.
[9] Kogure K, Ohira Y, Yamaguchi H. Prediction of sinkage and motion resistance of a tracked vehicle using plate penetration test[J]. Journal of Terramechanics, 1983, 20(3): 121-128.
[10] �ſ˽�. ����������ѧ[M]. ����: ������ҵ������, 2002: 355-399.
ZHANG Kejian. Vehicle terramechanics[M]. Beijing: National Defense Industry Press, 2002: 355-399.
[11] Terzaghi K. Theoretical soil mechanics[M]. New York: Wiley, 1966: 289-365.
[12] Myers J J, Carl H, Holm R H, McAllister. Handbook of ocean and underwater engineering[M]. New York: McGraw-Hill, 1969: 125-265.
[13] ������. �Ĵ�ʽҺѹ�ھ��ԭ��ת����������[J]. ������е, 1998, 4: 6-9.
CHEN Shijiao. Calculation of steering resistance of crawler hydraulic excavator in place[J]. Construction Machinery, 1998, 4: 6-9.
[14] ���. �Ĵ�ʽ������������ߵĵ����彨ģ�о���������[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2010: 74-76.
DAI Yu. The modelling research and simulation analysis on the single-rigid-body of tracked miner moving on the seafloor[D]. Changsha: Central South University. College of Mechanical and Electrical Engineering, 2010: 74-76.
[15] �·�. ��ײɿ�������˶���ģ������о�[D]. ��ɳ: ���ϴ�ѧ��Ϣ��ѧ�빤��ѧԺ, 2005: 41-63.
CHEN Feng. Study of deep seabed mining robot vehicle motion modeling and control[D]. Changsha: Central South University. School of Information Science and Engineering, 2005: 41-63.
(�༭ �°���)
�ո����ڣ�2012-10-05�������ڣ�2012-12-20
������Ŀ��������Ȼ��ѧ����������Ŀ(51074179)�����Ҹ����о���չ�ƻ�(��863���ƻ�)��Ŀ(2012AA091201)
ͨ�����ߣ�������(1980-)���У����������ˣ���ʿ�о��������º����Ĵ��ɿ��о����绰��15973129559��E-mail��qingjuehan@yahoo.com.cn
ժҪ���ڷ����ҹ���������ԵĻ����ϣ�����������ģ�⺣�࣬�õ���Ĵ�ʽ�ɿ�ǣ�����ʹ���֮��Ĺ�ϵ��ǣ������������Ӷ������С�������ȶ���30 kN��ͨ��������������ѹʵ������ת��������ˮ���������۷����������Ĵ�ʽ�ɿĶ���ѧģ�ͣ�����˲ɿ�ֱ������ʱ����iӦ��20%�Ŀ���Ҫ����ƴ�ģ��PID�������Ĵ��ʿ���ϵͳ������Simulink�������Կ���ϵͳ���з��档����������������ƵĴ���ϵͳ�ܹ�������Ĵ�ʽ�ɿ����߿���Ҫ���ʿ�����Ӧ�ٶȿ졢��̬�Ժã���֤�ɿ����õĶ������ܡ�
[4] ����, ������. ����㺣��ģ�⼰������ѧ�����о�[J]. ������ѧ, 2010, 27(11): 213-220.
[5] �ųɱ�, ���ǿ, ������, ��. �������������Ŀ��Ʒ����о�[J]. ��������, 2000, 22(5): 324-328.
[8] Wong Y. Theory of ground vehicle[M]. Canada: John Wiley & Sons, Inc, 2001: 90-93.
[10] �ſ˽�. ����������ѧ[M]. ����: ������ҵ������, 2002: 355-399.
[11] Terzaghi K. Theoretical soil mechanics[M]. New York: Wiley, 1966: 289-365.
[13] ������. �Ĵ�ʽҺѹ�ھ��ԭ��ת����������[J]. ������е, 1998, 4: 6-9.
[14] ���. �Ĵ�ʽ������������ߵĵ����彨ģ�о���������[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2010: 74-76.
[15] �·�. ��ײɿ�������˶���ģ������о�[D]. ��ɳ: ���ϴ�ѧ��Ϣ��ѧ�빤��ѧԺ, 2005: 41-63.
