
DOI: 10.11817/j.issn.1672-7207.2016.09.045
����ͷ�˶�������ά��λ����
���ȣ����𣬺������С��
(�Ϻ�������ѧ ��Դ�붯������ѧԺ���Ϻ��ж������̶��������봫���ص�ʵ���ң��Ϻ���200093)
ժ Ҫ��
ԭ���Ļ����ϣ����һ�ֲ��õ���ͷ˫������˶�������ά��λ�������ͼ��������װ�ã�����ͼ���뽹ģ������������λ�ù�ϵ�������ۺ������о���ϵͳ���÷ֹ��⾵����1����ͷ��2�������ʹ���źŷ�����ʵ���������ͬ�����㣬ͨ����Ȧ��������뾵ͷ�ľ��룬��ȡͬһʱ��ͬһ���岻ͬģ���̶ȵ�2����Ƭ������ģ���ȵĶԱȻ�ÿ�������ȡ�������ѡȡ2��ͼ�����뾵ͷ����IJ�ֵΪ4.2 mm�����þ�ֹԲ������뽹���ϵͳ������֤����������10%���ڣ������ø�ϵͳ�Ե��ʳ��ˮ���������ݽ�����ά�뽹������顣�о�����������÷������������ã���װ�ÿɽ������ͷ������������뽹���������⣬ʵ���ο����������˶�������������ع���
�ؼ��ʣ�
�˶�����������ͷ˫������뽹������ռ䶨λ���뽹��������
��ͼ����ţ�TH7 ���ױ�־�룺A ���±�ţ�1672-7207(2016)09-3246-06
Method of three-dimensional positioning for moving particles with single lens
JIN Na, ZHOU Wu, HU Jiarui, CAI Xiaoshu
(Shanghai Key Laboratory of Multiphase Flow and Heat Transfer in Power Engineering,
School of Energy and Power Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
Abstract: Based on the optical principles of depth from defocus(DFD), a method with a single lens and two image sensors was proposed to determine the three-dimensional positions of moving particles and an imaging system was established for measurement of particle locations. The theoretical and experimental analyses were carried out to explore the relationship between defocus blur degree of image and particle depth. A dispersion prism was used to connect a lens and two cameras, and synchronous measurement was realized with a signal generator. Two images with different defocus blur degrees could be captured for the same particle by adjusting the distances between the two image sensors and the lens. The depth information could be extracted from these two images. The distance difference between two image sensors and the lens was adopted as 4.2 mm. The validation experiments of the measurement system were carried out using static particles, in which the relative measurement errors were within 10%. And the three-dimensional defocus distance test was carried out for bubbles produced by electrolysis of salt water using the system. The results show that this method well feasible, and the problem of position blur in DFD with single lens can be solved using this setup, which indicates that DFD without references can be realized.
Key words: moving particles; single-lens double-camera; depth from defocus; spatial orientation; ambiguity of defocus
�����������㷺�����ڿ�ѧ�о��빤�������У���������������еĿ�����ά��ת�����Լ����ͻ��е�ȼ�������ȣ�������˲̬���ռ���ά���ԣ�ʹ�����������ٶȡ���������������Ȳ����IJ������кܴ��Ѷȡ�Ŀǰ�����ڿ����������ķ�����Ҫ�������ӵĶ�����ЧӦ[1]�����ӳ���[2]��ǰ�߰�����������ղ�����(LDV)[3]����λ���������ӷ�����(PDPA)[4]������PDPA�����ź�Ƶ�ʲ����ٶȣ������ź���λ����������������2�ַ��������������ζ�Ҫ��ϸ�[5]�����ӳ�����Ӧ������������ͼ�������(PIV)������ά��Ϣ�Ļ�ȡ�ַ�Ϊ˫Ŀ�Ӿ�����ȫϢ����˫Ŀ�Ӿ���ͨ��2�׳���ϵͳ��ͬ�Ƕȵij����һ���ռ��ڵ����ӽ�����ά��λ����ƥ���㷨���ӣ��豸�۸�[6]������ȫϢ���Ӳ�����(DHPIV)������ȫϢ��PIV�������ϣ����Ի��˲ʱ����ά�����ṹ���ٶȳ���Ȼ������������Ŀռ䶨λ��ȷ�ȵ�������ȫϢͼ���ؽ�����[7]���ĵ���ͷ�������ʽ�����ṩ�ḻ����ά��������Ϣ[8]������λ�ھ��Χ��Ŀ������������뽹ģ������Ӱ��������������ģ����Ϣ�����˿��������λ����Ϣ�����ܶԿ����������Ϣ������ȡ����һ�������ʵ�ֿ�����������������ľ�ȷ��������һ������Ի�ȡ����������ά�ռ�ֲ������Ƿ��[9-12]ͨ��ͼ���ģ���̶���ȡ������ȵ���Ϣ������Ҫ��������Ӿ���˫Ŀ����еĵ�ƥ�����⡣PENTLAND[13]ͨ���ı�������������2��ģ���̶Ȳ�ͬ��ͼ�����ָ���ȣ�������»����������������ȥ�����㷨����������ЧӦ��������Ч�ʡ�ZHOU��[14]ͨ��ʹ��һ�Ա������ʹ������ͼ��Ƶ�ʻ�����2��ͼ��ָ�������ȣ�����˸������������Ϣ�������豸Ҫ��ߡ������������뽹���װ����Ҫ�ı����ϵͳ������ȡǰ��2��ͬһ���岻ͬģ���ȵ���Ƭ��ֻ�ܽ����̬������뽹������⡣Ϊ�ˣ������������뽹����ѧԭ�������һ�ֵ���ͷ˫������˶�������ά��λװ�ã����÷ֹ��⾵���Ӹþ�ͷ��2�������ͨ����������뾵ͷ֮��ľ��룬��ȡͬһʱ��ͬһ���岻ͬģ���̶ȵ�2����Ƭ������ģ���ȵĶԱȻ�ÿ����������Ϣ�����þ�ֹ������ϵͳ�����뽹���������֤������������10%���ڣ�ͨ�����������ϵͳ���ȵĸĽ���ʩ�����Ե��ˮ�˶����ݽ�����ά��λ��������֤�����Ŀ����ԡ�
1 ����ͷ˫����˶�������ά��λԭ��
1.1 �뽹���ԭ��
��������ʵ���������������ĵ��Դ�������ߣ�ͨ����ͷ�����������ա����Դ�������ij��������ͼ1��ʾ[15]��ͼ1�У�PΪ��㣬���뾵ͷ��ƽ����뼴���Ϊu����ͷ����Ϊf�����P��λ����ѳ���ƽ���ϣ���ƽ��������ƽ��ľ��뼴���Ϊv����ʵ�ʳ���ƽ��ƫ����ѳ����棬��ɼ���ͼ������һ���̶ȵ��뽹ģ����ͼ1�У�2���뽹��ID1��ID2������ƽ��ľ���ֱ�Ϊs1��s2�����P�ڳ�����ID1��ID2�Ϸֱ��Ӧ�������ɢԲ�뾶Ϊr1��r2��
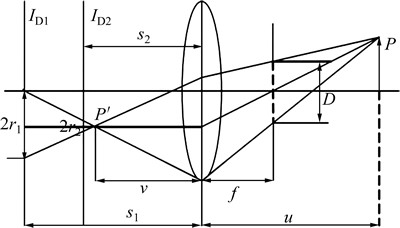
ͼ1 �뽹ģ���������
Fig. 1 Imaging processe for defocused blur
����Զ�ľ�ͷ����ԭ������
 (1)
(1)
������2��ɢԲ�뾶֮�� Ϊ
Ϊ ����ϸ�˹��ʽ
����ϸ�˹��ʽ ���ɵõ������㹫ʽΪ
���ɵõ������㹫ʽΪ
 (2)
(2)
��
 (3)
(3)
����ʽ(2)����������Ϊ������ѳ���λ�ô��������������ƽ���ͬ�࣬ʽ(3)����������Ϊ��������ѳ���λ�ô��������������ƽ����м䡣���ԣ�ֻ����2�������뽹ͼ���ģ���뾶�����ɲ���ʽ(2)��ʽ(3)���˶��������пռ䶨λ��
1.2 ģ���뾶����ȷ��
�뽹ͼ���ģ���뾶����ͨ��ģ��ͼ��Ĺ�����[16]���Ȼ�á�ͼ����뽹�̶Ȳ�ͬ���������Ŀ���Ҳ��ͬ���뽹�̶�ֱ��Ӱ����ͼ����������ȣ����������Ŀ��ȷ�ӳ��ͼ����뽹ģ������
ͼ2��ʾΪͬһ������ͬ���ʱ�ڲ�ͬ�������ϻ�õ��뽹�뾶��ͬ��2��ͼ�� M1��M2�������þ�ֵ�˲��������ȥ�봦����Ȼ������ݶ��㷨�õ��Ҷ��ݶ�ͼ����������������ȡ�ݶ�ͼ�����ֵ�������ø���ֵ���ݶ�ͼ����ж�ֵ�����õ����մ��������ͼ2��N1��N2��ʾ��
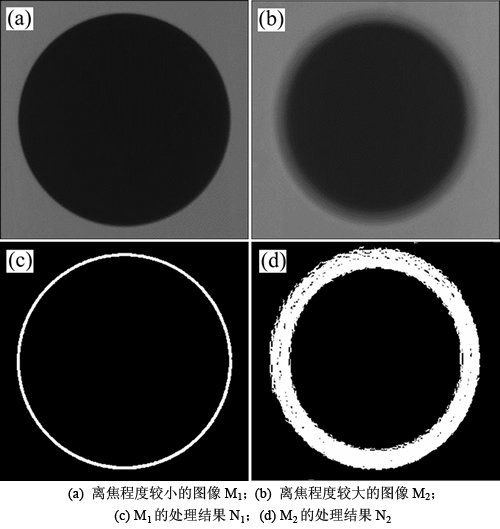
ͼ2 ��ͬ�뽹�̶�ͼ���ģ���뾶ʶ����
Fig. 2 Detection results of blurred radius for images with different defocus degrees
����2���ݶ�ͼ���Ե����������ֱ�ΪW1��W2������ͼ���ɾ۽�ͼ����ģ����W��С�����ͼ��ز���ԭ��[16]��W��ͼ����뽹�뾶r�����ȣ���
 (4)
(4)
���У�KΪ����������
 (5)
(5)
����ʽ(2)��ʽ(3)���ɵõ�Ŀ�����࣬ʵ�ֿ����Ŀռ䶨λ��
1.3 �뽹�������ж�
��ȡģ���뾶��������ʽ(2)��ʽ(3)��ѡ�����⣬ʵ�������뽹�����Ե����⡣ͼ3��ʾΪ����ͷ˫���װ����2̨������ܴ��ڵ�5���뽹�����������������λ��2ͼ��������ƽ��ͬ��(ͼ3(a)��ͼ3(e))������λ��ijͼ��������ƽ����(ͼ3(b)��ͼ3(d))��λ��2ͼ��������ƽ��֮��(ͼ3(c))��
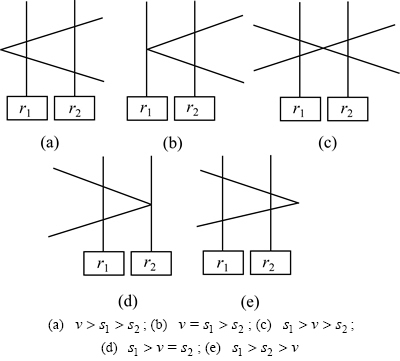
ͼ3 ˫���ϵͳ���ڵ�5���뽹���
Fig. 3 Five different defocus conditions in double-cameras system
����ͼ3(a)��ͼ3(e)��ʾ2�������Ӧ����ʽ(2)������࣬��ͼ3(c)��ʾ�����Ӧ����ʽ(3)�����㡣ͼ3(b)��ͼ3(d)��ʾΪ2���ٽ��������ʱ����������ֱ������ƽ��ID1��ID2�غϡ������������������ƽ��ID1�غϼ�r1=0ʱ�����P�ڳ���ƽ��ID2�ϳ������ɢԲ�뾶��Ϊ ������ͼ1�еļ��ι�ϵ�ɵõ�����㹫ʽΪ
������ͼ1�еļ��ι�ϵ�ɵõ�����㹫ʽΪ
 (6)
(6)
ͬ������r2=0ʱ�����P�ڳ���ƽ��ID1�ϳ������ɢԲ�뾶 Ϊ
Ϊ
 (7)
(7)
���У�DΪԶ�ľ�ͷ�﷽���㴦�Ĺ���ֱ����
��ʵ�ʲ��������У������1�����õ�ͼ����д����������뽹�뾶С���������2�϶�Ӧͼ����뽹�뾶С��������Ӧͼ3(c)��ʾ������������ʽ(3)���м��㣬�������ʽ(2)���ɴ˿ɽ��ģ��ͼ����뽹���������⡣
2 ����ͷ˫����˶�������ά��λϵͳ
�����������Ƶĵ���ͷ˫����˶�������ά��λϵͳʾ��ͼ��ͼ4��ʾ��ϵͳʹ��LED��Դ�Ա��ⷽʽ�������������е��˶����������߾���ͷ�ռ����뷴�ֹ��⾵�ֳɹ�ǿ��ͬ��2�����ֱ����2�������ʵ��˫�����ͬһ�ӳ�����Կ������г����������1��ֹ��⾵�ľ��뱣�ֲ��䣬��s1���䣬���2��ֹ��⾵֮��ľ������ͨ�����ӽ�Ȧ���е��ڡ������źŷ�����ʵ���������ͬ����������ͬһʱ�����㵽����ͬ������ͬ�뽹ģ���̶ȵ�ͼ����д������Ӷ�����˶���������άλ����Ϣ��
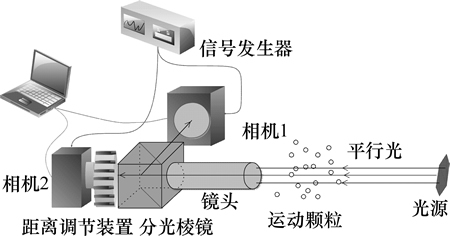
ͼ4 ����ͷ˫���ϵͳʾ��ͼ
Fig. 4 Schematic diagram of single-lens double-camera experimental
�����������������������ֹ��⾵֮�����IJ��(��s2-s1)��Сʱ2��ͼ��ģ���Ȳ�����ԣ��������������仯�ϴ������˵�����ֵ�澵ͷ�����ı仯��������ͬ�������������鷢�֣���װ���ڸò�ֵΪ5 mm����ʱ�ɻ�ó���ģ���Ȳ�ֵ�������Ҳ�������ӽ���2��ͼ���ǵ�ʵ�������еĽ�Ȧ�ߴ磬����������ѡ��˫�����Ӧ������ֵΪ4.2 mm����ѧ����ϵͳ��������ѧ���������γ��ȵ�����ʾ��ͼ��ͼ5��ʾ��ͼ5�У�fΪ���࣬L1Ϊ��ͷ���ȣ�L2Ϊ��ͷǰ���浽ǰ��ƽ����룬L3Ϊ��ͷǰ���浽����ƽ����룬L4Ϊ�ֹ��⾵��·���ȣ�L5Ϊ�ֹ��⾵�����1����ƽ����룬L6Ϊ�ֹ��⾵�����2����ƽ��ľ��롣
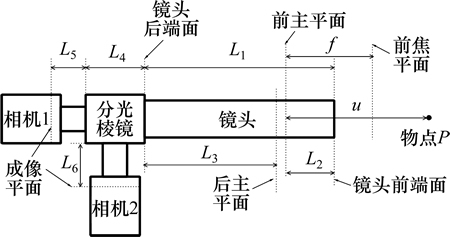
ͼ5 ϵͳ��ѧ����ʾ��ͼ
Fig. 5 Schematic diagram of optical parameters in system
ͼ5��ʾ�����ľ�����ֵ���1��ʾ���ɴ˿ɼ������ͷ����ƽ�浽���1�����2����ƽ��ľ���s1��s2���ֱ�Ϊ264.4 mm��268.6 mm��
��1 ϵͳ��ѧ������ֵ
Table 1 Values of optical parameters in system mm

3 ����ͷ˫���ϵͳ�뽹�������
3.1 Բ��궨���뽹�������
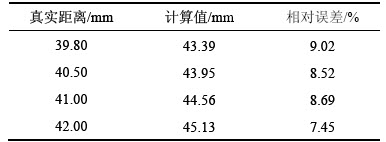
Ϊ��֤����ϵͳ�봦���㷨�Ŀ����ԣ����ô�װ�ö�Բ��궨������뽹������顣ͼ6��ʾΪԲ��궨����4�鲻ͬ����ʱ2������ֱ��õ��뽹ͼ�����õ�1������ԭ����4��ͼ����з������õ������뾵ͷǰ������룬���2��ʾ������ʵֵ��ȽϿɼ���������仯���ƺ���������������10%���ڡ��������֣�1) ���ڱ�װ���о�ͷ����Զ�ĶȲ�Ϊ0�㣬���²�ͬ����ƽ���ϳ����С�����仯��ʹ�����������һ��ƫ���ѡ������˫��Զ�ľ�ͷ������һ����߲������ȣ�2) ����ȡ�������������ʱ������OTSU����õ��ݶ�ͼ����ֵ����ͼ���С��ͼ������Աȶȵ�Ӱ�죬��Ҫ��һ�����뿼�ǣ�3) ͨ�����۷������֣��ڱ��ĵIJ��������£��㷨�ļ��㾫��Ϊ5%���ң�4) �ڼ���2��ͼ��ģ���뾶�ı�ֵʱ��ֻ������ͼ��ı�Ե������Ϣ����������ģ��ͼ���Ե�Ҷ���Ϣ[17]���ں����о���Ӧ���п��ǣ���ʵ��ģ���뾶�ĸ���ȷ������
ͼ6 4�鲻ͬ����ʱ2������ֱ��õ��뽹ͼ��
Fig. 6 Defocused images from 2 cameras for 4 different locations
��2 ��ֹԲ���뽹���
Table 2 Depths of defocus for static dot
3.2 �˶������뽹�������
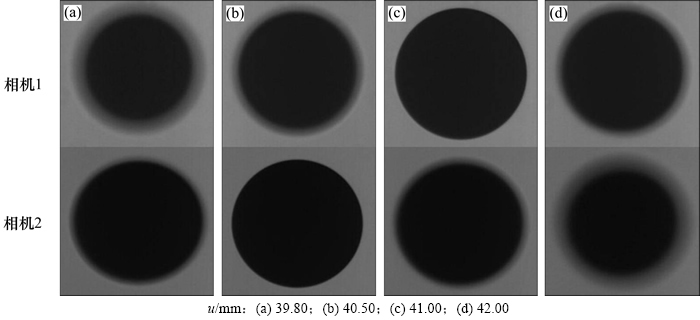
Ϊ��֤�÷������˶��������Ŀ����ԣ������������еĵ��ʳ��ˮ���ݽ������㣬�����ͼ7��ʾ��2�ź���ͬ��С��λ�õ�����ͼƬ����ͼ7�ɼ���3��λ������µĿ���ͼ�������ο��еĿ��������2�еij���������1�еij�����������Բ�ο��п�������ģ�����෴�������ο��п��������1�����2�ϳ���ģ�������������ʵ��װ����s1��s2�������2�ij���ƽ����뾵ͷ��Զ�������㵽��ͼ��������������λ�õ���ͷǰ�˾���Ӧ�Ͻ������ع�����������Բ�ο������ӿռ�λ��ʱӦʹ��ʽ(2)�����ع����ο������ӿռ�λ��ʱӦʹ��ʽ(3)�����������жϣ��ع�������ά�ռ������Ϣ����ͼ8��ʾ���Ծ�ͷǰ����Ϊ���棬��ʶ������������Ϊ0.90 mm����ʵ�ʲ������ʳ��ˮ���ݵ�ͭ˿�������1.07 mm�Ϸ��ϣ�֤���˸ò���������װ�õĿ����ԡ�
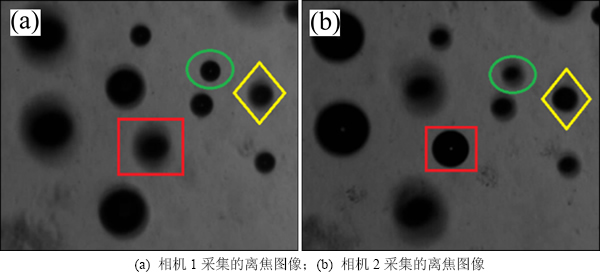
ͼ7 ϵͳ�ɼ��ĵ��ʳ��ˮ���������������е��뽹ͼ��
Fig. 7 Defocused images of moving bubbles captured by system
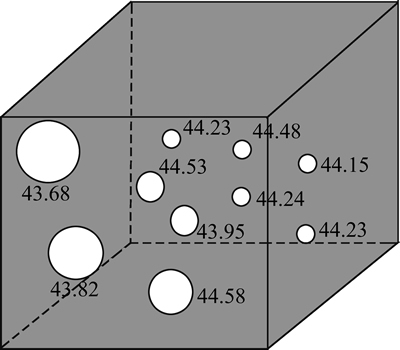
ͼ8 �˶����ݿռ�λ���ع�
Fig. 8 Positioning of moving bubbles
4 ����
1) ���ڵ���ͷ˫������뽹������װ�ý����ģ��ͼ����뽹���������⣬����ʵ���˶�����������������µ���ά��λ��
2) �����������¶Ծ�ֹ�������뽹���������������10%���ڣ���ʵ�����˶����ݵ���ά��λ��֤���˲���������װ�õĿ����ԣ�Ϊ�����Ķ������ά�������춨�˻�����
3) �ò���װ�ò���1����ͷ��2���������֤�����ӽǵ�һ���ԣ�������˫Ŀ�Ӿ��пռ��ƥ�����⣬�㷨�������ֹ��⾵��2��ͼ�������ɣ����γ�1��˫ͼ�����������װ�ü��������Ϊ��㡣
�ο����ף�
[1] ����, ������, ������. ���ڼ�������ղ��ٵ��������Լ���[J]. ���������, 2012, 42(1): 18-21.
LIU You, YANG Xiaotao, MA Xiuzhen. Technique of flow field measurement based on laser Doppler velocimetry[J]. Laser and Infrared, 2012, 42(1): 18-21.
[2] ������. ƽ���ά˲ʱ���ٳ�����ͼ����ټ����о�[D]. ̫ԭ: ̫ԭ������ѧˮ����ѧ�빤��ѧԺ, 2005: 4-10.
ZHANG Xiaoyan. Study of digital image velocimetry for simultaneous flow field in two dimensional plane[D]. Taiyuan: Taiyuan University of Technology. School of Water Conservancy Science and Engineering, 2005: 4-10.
[3] ����. ������ټ���(LDV)����50������ʾ[J]. ʵ��������ѧ, 2014, 28(6): 51-55.
SHEN Xiong. A historical review for the 50th anniversary of laser doppler velocimetry[J]. Journal of Experiments in Fluid Mechanics, 2014, 28(6): 51-55.
[4] ������, ��ƼƼ, ���, ��. PDPA �������������������о��е�Ӧ��[J]. �й�ũ��ˮ��ˮ��, 2008(9): 70-72.
JIA Weidong, LI Pingping, QIU Baijing, et al. Application of phase doppler particle analyzer in reek spray nozzle��s characteristic experiment[J]. China Rural Water and Hydropower, 2008(9): 70-72.
[5] KASHDAN J T, SHRIMPTON J S, WHYBREW A. A digital image analysis technique for quantitative characterisation of high-speed sprays[J]. Optics and Lasers in Engineering, 2007, 45(1): 106-115.
[6] ������, �뷫, ��ΰ, ��. ˫Ŀ�����Ӿ�����ϵͳ�������ʵ��[J]. �������ӹ���, 2012, 32(4): 107-109.
WANG Jianhua, FENG Fan, LIANG Wei, et al. Design and implementation of measurement system based on binocular stereo vision[J]. Ship Electronic Engineering, 2012, 32(4): 107-109.
[7] �깦��, ������, ������, ��. ����ȫϢ����ͼ����ټ���(DHPIV)�о���չ[J]. ��ѧ��չ, 2007, 37(4): 563-574.
SHEN Gongxin, ZHANG Yonggang, CAO Xiaoguang, et al. Advances in DHPIV[J]. Advances in Mechanics, 2007, 37(4): 563-574.
[8] CHEN Xiaozhen, ZHOU Wu, CAI Xiaoshu, et al. In-line imaging measurements of particle size, velocity and concentration in a particulate two-phase flow[J]. Particuology, 2014, 13(1): 106-113.
[9] ���Ƿ�, ��۾�, ��. ����Զ�Ĺ�ѧϵͳɢ��ͼ��ľ������[J]. �����뼤���, 2006, 35(Suppl): 534-537.
ZHOU Yefeng, QIU Huijuan, LI Zhuo. Depth estimation based on defocus image of the telecentric lens[J]. Infrared and Laser Engineering, 2006, 35(Suppl): 534-537.
[10] �̺�, ��Ȩ��, ������. һ���µĻ���ɢ��ͼ�����Ȼָ��㷨[J]. �����Ӧ��������, 2010, 27(2): 271-273.
CHENG Hong, ZHANG Quanbing, GONG Yanyan. A new depth recovery algorithm based on defocus image[J]. Computer Applications and Software, 2010, 27(2): 271-273.
[11] BAILEY S W, ECHEVARRIA J I, BODENHEIMER B, et al. Fast depth from defocus from focal stacks[J]. Visual Computer, 2015, 31(12): 1697-1708.
[12] LEE E, CHAE E, CHEONG H, et al. Depth-based defocus map estimation using off-axis apertures[J]. Optics Express, 2015, 23(17): 21958-21971.
[13] PENTLAND A P. A new sense for depth of field[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1987, 9(4): 523-531.
[14] ZHOU C, NAYAR S. What are good apertures for defocus deblurring?[C]// Proceedings of IEEE International Conference on Computational Photography. San Francisco, USA: IEEE, 2009: 1-8.
[15] ����, �˿���. ���ھر��ַ���ɢ��ͼ����ȹ���[J]. �Ϻ���ͨ��ѧѧ��, 2000, 34(7): 917-920.
TIAN Tao, PAN Junmin. Depth estimation from defocus based on moment-preserving[J]. Journal of Shanghai Jiaotong University, 2000, 34(7): 917-920.
[16] KUNDUR D, HATZINAKOS D. Blind image deconvolution[J]. Signal Processing Magazine, IEEE, 1996, 13(3): 43-64.
[17] ������, ����. ���� Matlab ��ͼ�����������۷����о�[J]. ͨ�ż���, 2012, 44(12): 7-9.
ZHANG Shiling, SUN Xu. Image evaluation based on east wavelet transform[J]. Communications Technology, 2012, 44(12): 7-9.
(�༭ ����ΰ)
�ո����ڣ�2015-09-07�������ڣ�2015-11-25
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51206112��51327803)���Ϻ�����Ȼ��ѧ����������Ŀ(12ZR1446900)���Ϻ��н�ί���д�����Ŀ(12YZ110) (Projects(51206112, 51327803) supported by the National Natural Science Foundation of China; Project(12ZR1446900) supported by the Natural Science Foundation of Shanghai Municipality; Project(12YZ110) supported by the Innovation Project of Scientific Research of Shanghai Municipal Education Commission)
ͨ�����ߣ����𣬲�ʿ�������ڣ����¿������������߲��������о���E-mail: zhouwu@usst.edu.cn
ժҪ���ڹ�ѧ�뽹���ԭ���Ļ����ϣ����һ�ֲ��õ���ͷ˫������˶�������ά��λ�������ͼ��������װ�ã�����ͼ���뽹ģ������������λ�ù�ϵ�������ۺ������о���ϵͳ���÷ֹ��⾵����1����ͷ��2�������ʹ���źŷ�����ʵ���������ͬ�����㣬ͨ����Ȧ��������뾵ͷ�ľ��룬��ȡͬһʱ��ͬһ���岻ͬģ���̶ȵ�2����Ƭ������ģ���ȵĶԱȻ�ÿ�������ȡ�������ѡȡ2��ͼ�����뾵ͷ����IJ�ֵΪ4.2 mm�����þ�ֹԲ������뽹���ϵͳ������֤����������10%���ڣ������ø�ϵͳ�Ե��ʳ��ˮ���������ݽ�����ά�뽹������顣�о�����������÷������������ã���װ�ÿɽ������ͷ������������뽹���������⣬ʵ���ο����������˶�������������ع���
[1] ����, ������, ������. ���ڼ�������ղ��ٵ��������Լ���[J]. ���������, 2012, 42(1): 18-21.
[2] ������. ƽ���ά˲ʱ���ٳ�����ͼ����ټ����о�[D]. ̫ԭ: ̫ԭ������ѧˮ����ѧ�빤��ѧԺ, 2005: 4-10.
[3] ����. ������ټ���(LDV)����50������ʾ[J]. ʵ��������ѧ, 2014, 28(6): 51-55.
[4] ������, ��ƼƼ, ���, ��. PDPA �������������������о��е�Ӧ��[J]. �й�ũ��ˮ��ˮ��, 2008(9): 70-72.
[6] ������, �뷫, ��ΰ, ��. ˫Ŀ�����Ӿ�����ϵͳ�������ʵ��[J]. �������ӹ���, 2012, 32(4): 107-109.
[7] �깦��, ������, ������, ��. ����ȫϢ����ͼ����ټ���(DHPIV)�о���չ[J]. ��ѧ��չ, 2007, 37(4): 563-574.
[9] ���Ƿ�, ��۾�, ��. ����Զ�Ĺ�ѧϵͳɢ��ͼ��ľ������[J]. �����뼤���, 2006, 35(Suppl): 534-537.
[10] �̺�, ��Ȩ��, ������. һ���µĻ���ɢ��ͼ�����Ȼָ��㷨[J]. �����Ӧ��������, 2010, 27(2): 271-273.
[15] ����, �˿���. ���ھر��ַ���ɢ��ͼ����ȹ���[J]. �Ϻ���ͨ��ѧѧ��, 2000, 34(7): 917-920.
[17] ������, ����. ���� Matlab ��ͼ�����������۷����о�[J]. ͨ�ż���, 2012, 44(12): 7-9.
