
DOI: 10.11817/j.issn.1672-7207.2016.03.011
һ��ϡ�������Ӧ�ֶ�����ƥ�����㷨
�Ƴ�ΰ����ѩ�棬������
(�����ѧ ͨ�Ź���ѧԺ�����죬400044)
ժ Ҫ��
����(StOMP)�㷨��Ҫ�źŵ�ϡ�����Ϊ������Ϣ���ع����Ƚϵ͵��ص㣬���һ��ϡ�������Ӧ�ֶ�����ƥ�����㷨�����ȣ�ͨ���Թ۲�������ʼ�в�������õIJ������������������ɢ���ұ任�������֧�ż���Ҫ��������ԭ��������Σ�����������ʳ�����ص����ӶԽϴ����ֵ���������ʵ�����������ͨ���趨��ֵ��ѡȡ��ԭ�ӽ����Ż������������StOMP�㷨�Ŀ���²��ñ䲽���ķ���ʵ��ϡ��ȵıƽ����źŵľ�ȷ�ع���������������������������㷨���źŵ�ϡ��Ⱦ��кܺõ�����Ӧ���ԣ������ڱ����˽ϵ��ع����Ӷȵ�ͬʱ���и��ȶ����ع�������
�ؼ��ʣ�
ѹ����֪���ֶ�����ƥ������ϡ�������Ӧ���ع�������
��ͼ����ţ�TN911.7 ���ױ�־�룺A ���±�ţ�1672-7207(2016)03-0784-09
A sparsity adaptive stagewise orthogonal matching pursuit algorithm
TANG Chaowei, WANG Xuefeng, DU Yongguang
(College of Communication Engineering, Chongqing University, Chongqing 400044, China)
Abstract: An improved stagewise orthogonal matching pursuit (StOMP) algorithm was proposed considering that the algorithm needs signal sparsity as the prior knowledge and has a relatively poorer reconstruction performance. Firstly, discreet cosine transform was applied to the vector of residual correlations to estimate the maximum number of atom needed by the support set. Then the large threshold parameter was adjusted by a factor which is positively correlated with the sampling rate and the atoms chosen by setting a threshold value was optimized. Finally, the close approach of signal sparsity and precise reconstruction of the signal were realized with variable step size within the frame of StOMP. The results show that the proposed algorithm has good adaptability without prior information of the sparsity and this algorithm not only keeps the low reconstruction complexity but also shows better and more stable reconstruction quality than the original StOMP algorithm.
Key words: compressive sensing; stagewise orthogonal matching pursuit; sparsity adaptive; reconstruction performance
��ͳ���źŲ�������Nyquist��������Ҫ���źŵIJ���Ƶ������Ϊ�źŴ�����2����������ʧ��ػָ�ԭʼ�źš�DONOHO��[1-2]�����ѹ����֪���ۣ����ź�ϡ��ֽ�ͱƽ��ǶȽ�����һ���µ��ź������ʹ��������ۿ�ܣ��ܹ��ڱ�֤��Ϣ����ʧ������£�����Զ�����ο�˹�ز�������Ҫ��������������źţ�������ź���ij���任����ϡ��Ļ����ǿ�ѹ���ģ�ѹ����֪���۱��������һ����任������صĹ۲�����任���õĸ�ά�ź�ͶӰ��һ����ά�ռ��ϣ�������Щ�����Ĺ۲�ֵ��ͨ������Ż��������ʵ���źŵľ�ȷ�ع�����һ�����ܹ���Ч�����ź��ڻ�ȡ���洢����������е������������źŲɼ��봦������������µı��ع��㷨��ѹ����֪�����еĹؼ�����֮һ����Ҫ������֪�۲����۲�������ǰ���£��ܸ�Ч�Ҿ�ȷ�ض�ԭʼ�źŽ����ؽ���Ŀǰ�ϳ��õ��ع��㷨���Ż�������Ż���̰���㷨�ȣ������е�̰���㷨(ͨ��̰�������ķ���������֧�ż������ƽ�ԭʼ��)����������С���㷨���Ҿ���һ�����ع����ȶ����㷺���á�̰���㷨�������������ƥ����(matching pursuit, MP)������ƥ����(orthogonal matching pursuit, OMP)[3]�㷨��������2���㷨���ع�Ч�ʺ;����ϲ������룻��������ƥ����(regularized orthogonal matching pursuit, ROMP)[4]�������ķ����ҳ���ѡԭ�Ӽ�������������ԭ�Ӽ���������֧�ż���ѹ������ƥ����(compressive sampling matching pursuit, CoSaMP)[5]���á����ݡ�˼��������֧�ż�����2���㷨����һ���̶���������ع����ȣ��ֶ�����ƥ����(stagewise orthogonal matching pursuit, StOMP)[6]�㷨ͨ���趨��ֵ����ԭ�ӵ�����ѡȡ����һ������Ч�ʽϸߵ��ع��㷨�����ع����Ƚϲͬʱ������̰���㷨��Ҫ���źŵ�ϡ�����֪�������ϡ��ȵĹ��Ʋ�ȷ���ܶ��źŽ����ܵõ���ȷ�ؽ�����������ǰ����ʵ��Ӧ�����������㣬ϡ�������Ӧƥ����(sparsity adaptive matching pursuit, SAMP)[7]��һ�ֲ����ź�ϡ���Ӱ����ع��㷨����ͨ��Ԥ���ʼ����������ÿ�ε��������ӹ̶��IJ�������ʵ�ֶ��ź�ϡ��ȵĹ��ƣ�ͬʱ���²в֧�ż��Աƽ�ԭʼ�źţ�������������˵���㷨���ع�Ч�ʽϵ͡������������StOMP�㷨�����һ��ϡ�������Ӧ���ع����ܽϺõĸĽ��㷨��������ɢ���ұ任�����������е����ԣ������֧�ż���Ҫ��������ԭ����Ŀ�����Խϴ����ֵ��������������������ѡȡ��ԭ����Ŀ��ͬʱ����ѡȡ��ԭ�ӽ���Ԥ��������������Ӧ���ڲ����ķ�������֤���ڸ���֧�ż�ԭ�ӵ����ƥ���ԣ�ʵ���ź�ϡ��ȵıƽ��;�ȷ�ع�����������֤�˱��������㷨���ź�ϡ�������Ӧ�Ժ��ع������ϵ���Խ�ԡ�
1 ѹ����֪��StOMP�㷨
1.1 ѹ����֪����
ѹ����֪���۵ı�����һ�ַ���Ӧ�Եġ������ԵĿ�ѹ���źŵ��ؽ�������������3����Ҫ�����ݣ��źŵ�ϡ���ʾ���۲����������ع��㷨��
1) �źŵ�ϡ���ʾ���������ΪN���ź� ��ij�任����ֻ��K��ϵ����Ϊ0(�������Դ�������ϵ��)���� K����N����ô������Ϊ�ź�x�ڸñ任������ϡ��ģ�Ҳ�ɳ�ΪK-ϡ�衣���ź���ϡ���
��ij�任����ֻ��K��ϵ����Ϊ0(�������Դ�������ϵ��)���� K����N����ô������Ϊ�ź�x�ڸñ任������ϡ��ģ�Ҳ�ɳ�ΪK-ϡ�衣���ź���ϡ��� �ϵı�ʾΪS�����ϡ��任���̿��Ա������£�
�ϵı�ʾΪS�����ϡ��任���̿��Ա������£�
 (1)
(1)
2) �۲����������ڲ����� �ϻ��M(K��M ���� N)������ͶӰ
�ϻ��M(K��M ���� N)������ͶӰ ��
�� ������ԭʼ�źŽ��о�ȷ�ؽ����þ������ʽ���Լ�����
������ԭʼ�źŽ��о�ȷ�ؽ����þ������ʽ���Լ�����
 (2)
(2)
3) ѹ����֪�㷨�ع�����M������ֵ�����������۲���� ���ع��㷨���ؽ����߱ƽ�ԭʼ�ź�x����x��K-ϡ�������£������źŵ��ع��ȼ���һ��Ѱ����Լ�������µ����Ž�����[8-9]���������£�
���ع��㷨���ؽ����߱ƽ�ԭʼ�ź�x����x��K-ϡ�������£������źŵ��ع��ȼ���һ��Ѱ����Լ�������µ����Ž�����[8-9]���������£�

 (3)
(3)
1.2 �۲�����ѡȡ
Ϊ���ܹ���ȷ���ؽ�ϡ����ѹ���źţ��������K-ϡ���ź�x���۲��������Ҫ�������Ƶ�������(restricted isometry property, RIP)��
 (4)
(4)
���У� Ϊ����PΪ����������������ɵľ���
Ϊ����PΪ����������������ɵľ��� Ϊ������Kϡ���ź������������Ե���С������cΪͶӰ����ϵ�����С�����Լ���Ⱦ���˵�����в�����
Ϊ������Kϡ���ź������������Ե���С������cΪͶӰ����ϵ�����С�����Լ���Ⱦ���˵�����в����� ����ϡ���ʾ��������Ҳ����������ϡ���ʾ�����۲������ϡ����������Լ���Ⱦ����ǵȼ۵�[2]�����ڸ�˹������������������������ɵľ�����أ���ˣ�ѡ���˹���������Ϊ�۲������Ժܺõ�����RIP���ԡ�
����ϡ���ʾ��������Ҳ����������ϡ���ʾ�����۲������ϡ����������Լ���Ⱦ����ǵȼ۵�[2]�����ڸ�˹������������������������ɵľ�����أ���ˣ�ѡ���˹���������Ϊ�۲������Ժܺõ�����RIP���ԡ�
���⣬ѡ��Ը�˹��������������������������ʹ�۲������кܺõ�ȥ�����[10]��

 (5)
(5)
���У� Ϊ����ֵ�����ǶԽ���ʽ(5)���Կ������źŴӸ�ά����άͶӰ֮�������֮�����ϵ��Ϊ0��������أ���ˣ��ڹ۲�����ѡȡ�ϣ���������˹���������һ���ܺõ�ѡ���۲������ϡ�������RIP��ʱ���ڹ۲�������ܹ���֤�źŵ���Ҫ��Ϣ����ʧ���⽫�������źŵľ�ȷ�ؽ���
Ϊ����ֵ�����ǶԽ���ʽ(5)���Կ������źŴӸ�ά����άͶӰ֮�������֮�����ϵ��Ϊ0��������أ���ˣ��ڹ۲�����ѡȡ�ϣ���������˹���������һ���ܺõ�ѡ���۲������ϡ�������RIP��ʱ���ڹ۲�������ܹ���֤�źŵ���Ҫ��Ϣ����ʧ���⽫�������źŵľ�ȷ�ؽ���
1.3 �ֶ�����ƥ����(StOMP)�㷨
����ѹ����֪�е�����ƥ�����㷨���ԣ���ÿ�δӹ۲�����н�ѡȡ1�����ԭ�ӣ���Ȼ���ַ�ʽ��һ���̶��ϱ�֤��ͼ���ع��ľ�ȷ�ȣ������ɱ������ɸ��㷨������ԭ��ѡȡ�Ĺ����У���ƥ�����̫�����������������ս��������ع����̵�Ч�ʡ���StOMP�㷨���ʾ�����ÿ��ƥ��ʱѡ���IJ�����1��ԭ�ӣ�����ͨ���趨��ֵѡȡ���ԭ�ӣ��γ�1����ʼ��ԭ�Ӽ��ϣ�Ȼ�����֧�ż�����������С���˷���ý��ƽ⣬ͬʱ��ɶԲв�ĸ��£����������Ƿ�������ֹ�������������㣬���Ը��µIJв��������ԭ�ӵ�ƥ���٣��Ӷ�������ƥ�����������ع�Ч�ʡ�
StOMP�㷨���裺
���룺M��Nά�۲������Mά�۲�����y
������ع��ź�
1) ��ʼ�в� ��������
�������� ��
��
2) �����ڻ� ��
��
3) ͨ���趨����ֵ�������� �����У�
�����У� Ϊ����ˮƽ��
Ϊ����ˮƽ�� ��
�� Ϊ��ֵ������ȡֵ��ΧΪ[2, 3]��
Ϊ��ֵ������ȡֵ��ΧΪ[2, 3]��
4) ����֧�ż��� ����������С���˷�����֧�ż�
����������С���˷�����֧�ż� �ϵıƽ�ϵ������
�ϵıƽ�ϵ������ ��
�� ��
��
5) ���²в�(����) ��
��
6) �����ֹ��������s��10���� ��
�� (����OPTΪ������ޣ�ȡ10-5)���㷨��ֹ����
(����OPTΪ������ޣ�ȡ10-5)���㷨��ֹ���� ��Ϊ�������������ִ��
��Ϊ�������������ִ�� ��ת������2)��
��ת������2)��
StOMP�㷨��ѡȡԭ��ʱ������һ���̶ȵļ�������㷨ִ���ٶȣ�����Ҳ�������IJ��㣺1) ��������ÿ�ε����Ĺ�����Ѱ�ҵĶ������ź����ƥ��ԭ�ӣ���˵����źŵ��ع����ȵ���OMP�㷨���ع����ȣ��ع����ȶ���Ҳ���ܵõ���֤[11]��2) ���㷨ͨ���趨��ֵ ÿ��ѡȡ���ԭ�Ӹ���֧�ż�������ʵ�ʲ����У���ֵ������ѡ�����[11]��3) ��Ҫָ������StOMP�㷨��Ҫ�źŵ�ϡ�����Ϊ����֪ʶ��ֻ����ȷ�������źŵ�ϡ��ȣ����ܾ�ȷ���ع�ԭʼ�źš�Ȼ��������ʵ���ź�(��������ͼ������ϡ�����Ͻ��ǽ���ϡ���)������ȷ������ϡ��ȡ�
ÿ��ѡȡ���ԭ�Ӹ���֧�ż�������ʵ�ʲ����У���ֵ������ѡ�����[11]��3) ��Ҫָ������StOMP�㷨��Ҫ�źŵ�ϡ�����Ϊ����֪ʶ��ֻ����ȷ�������źŵ�ϡ��ȣ����ܾ�ȷ���ع�ԭʼ�źš�Ȼ��������ʵ���ź�(��������ͼ������ϡ�����Ͻ��ǽ���ϡ���)������ȷ������ϡ��ȡ�
2 ϡ�������ӦStOMP�㷨
�������StOMP�㷨�IJ��㣬�����������о���ɢ���ұ任(discrete cosine transform, DCT)�任���ص㡢��ֵ������ԭ��ѡȡ��Ӱ���ϡ�������Ӧ�� ��[12-13]�Ļ����ϣ������һ�־���ϡ�������Ӧ���ع����ܽϺõ��㷨������Ҫ˼���ǣ����ȶԹ۲�������ʼ�в�������õIJ����������������DCT�任�������֧�ż���Ҫ��������ԭ������Ȼ����һ��������ʳ�����ص����ӶԽϴ���ֵ������������������ͨ���趨��ֵ��ѡȡ��ԭ�ӽ����Ż������ٱȽ�ԭ�Ӽ�����ԭ�ӵ���Ŀ�ʹ�ʱ�IJ�����ȷ����Ҫѡȡ��ԭ����Ŀ������֧�ż��������StOMP�㷨����£����ϸ��²���������֧�ż������ƽ��ź�ϡ��ȵ�ͬʱ����źŵľ�ȷ�ع������´�֧�ż����ԭ����Ŀ���Ƽ�ԭ��Ԥ��������ֵ����������ϡ�������Ӧ���㷨�����4�������ϡ�������ӦStOMP�㷨����������
2.1 ֧�ż����ԭ����Ŀ���Ƽ�ԭ��Ԥ����
2.1.1 ֧�ż����ԭ����Ŀ����
��ͼ����Ƶ�����У���������DCT������DCT�ı任(��H.264�������任)����߱���Ч�ʣ�ͬʱȡDCT�任֮��ľֲ�DCTϵ�����з��任���߶�DCTϵ���ľֲ�����ֵ����ѹ����֪�ع���ͨ�����Լ���ĸ������ָ�ԭʼ����[14]���ع��㷨�У���Ҫ�ӹ۲������Mά�۲�����y�������õ�1��Nά���ع��������ڱ���������DCT�任������֧�ż����ԭ����Ŀ�����ȣ��۲������ù۲�����(��ʼ�в�)��˵õ�������������� ��Ȼ�������VCR����DCT�任�������������е�Ԫ�ذ�����ֵ��С���������Ѹ��������M����ֵ��С��ϵ����0��������ɢ���ұ任��ǿ�������������ԣ��ҳ����ܴ���������������һ��ԭ�� (�ڸ��㷨�У���ѡȡԭ�ӵ�����ռԭ����������90%)�����趨����ԭ�ӵ���ĿΪ֧�ż���Ҫ����������ĿLmax��
��Ȼ�������VCR����DCT�任�������������е�Ԫ�ذ�����ֵ��С���������Ѹ��������M����ֵ��С��ϵ����0��������ɢ���ұ任��ǿ�������������ԣ��ҳ����ܴ���������������һ��ԭ�� (�ڸ��㷨�У���ѡȡԭ�ӵ�����ռԭ����������90%)�����趨����ԭ�ӵ���ĿΪ֧�ż���Ҫ����������ĿLmax��
2.1.2 ԭ��Ԥ����
ͨ���趨��ֵ��ÿ�ε���ʱ����ѡȡһ��ԭ�ӣ�����۲��������²в�rs���ڻ�ΪCs��������ô��Щԭ�Ӿ���Cs�д�����ֵ����ֵ��Ӧ������ֵ���γɵĺ�ѡ�����ڱ����жԺ�ѡ���е�ԭ����һ���Ĵ��������ȣ��ҳ���ѡ���е�ԭ�Ӷ�Ӧ������Cs�е���ֵ��Ȼ�����Щ��ֵ���н������У������η�����Щ��ֵ��Ӧ������Cs�е�λ�ã��γ��µĺ�ѡ������ʱ�ú�ѡ���еĵ�1������ֵ�Ͷ�Ӧ����Cs�е����ֵ����������ֵΪ����ƥ��ԭ�ӣ���2������ֵΪ����ƥ��ԭ�ӡ����������㷨�����У���������ѡ����Ϊƥ���һЩԭ��������֧�ż���
2.2 ��ֵ��������
ѡȡLena��Boat 2��������ͼ���趨��ͬ�ij����� ������StOMP�㷨�ڲ�ͬ��ֵ�������ع�ͼ��ķ�ֵ�����(peak signal to noise ratio��PSNR)������ֱ����1�ͱ�2��ʾ��
������StOMP�㷨�ڲ�ͬ��ֵ�������ع�ͼ��ķ�ֵ�����(peak signal to noise ratio��PSNR)������ֱ����1�ͱ�2��ʾ��
�ɱ�1�ͱ�2��֪������Lena��Boat 2��ͼ���ڳ�������Խϵ͵������£�����ֵ�����ϵ�ʱ������ɸѡ���ĺ�ѡ��ԭ�ӽ϶࣬��ɹ��ȹ��ƶ�Ӱ���ؽ�Ч�����Ӷ���ֵ����Ƚϵͣ�����ֵ��������ʱ������ɸѡ���ĺ�ѡ��ԭ�������ٶ��������ؽ���������ֵ�����Ҳ�ϵ͡���ˣ���ֵ������ѡȡ��ͼ����ؽ�Ч�����źܴ��Ӱ�졣
ͼ�����У��ͳ����ʾ��нϺõ�ʵ�����壬���ң�����ֵ�����ϴ�ʱ(ȡֵ��ΧΪ[2.6,3])��StOMP�㷨���ѡ��ѡȡ��ԭ�ӽ��ٶ����и��ߵ��ع�Ч�ʣ���ͼ����ع��������ѡ���ˣ��ۺϿ����ع�Ч�����ع����ȣ�����ֵ�����ϴ�ʱ�������ʵ�������ֵ����[15-16]������ͨ��һ��������ʳ�����ص�������������ֵ�������� (���IJ��õ���������Ϊ
(���IJ��õ���������Ϊ )��ͨ���ʵ�������ֵ���������Ӻ�ѡ��ԭ�������ﵽ�����ؽ����ȵ�Ŀ�ġ�
)��ͨ���ʵ�������ֵ���������Ӻ�ѡ��ԭ�������ﵽ�����ؽ����ȵ�Ŀ�ġ�
2.3 ϡ�������Ӧ
���ź�ϡ���δ֪������£������㷨���������̷�Ϊ���ɸ��Σ���ÿ���ξ����в����ĵ����������ݲ���ʵ�ֶԺ�ѡ����ԭ�ӵĽ���ѡȡ[17-18]�����ŵ������̵ķֶν��У��������ϵظ��£�ϡ��ȵĽ��ƹ��ƺ�֧�ż�������Ҳͬ�����С����ȣ��趨��ʼ������Ȼ��ͨ���趨��ֵ�γ�ԭ�Ӻ�ѡ��������ԭ��Ԥ����֮�Դ�ʱ��ѡ���ڵ�ԭ����Ŀ�뵱ǰ���������ж��������ѡ����ԭ����Ŀ���ڲ���Ls����ô��ѡȡ��ѡ����ǰLs������ֵ��������֧�ż�������ȫ������֧�ż������䣬�����ع����̵Ľ��У��Բ������и��£������ϡ��ȵĽ��ƹ��ƣ���ʱ֧�ż��õ�����Ч���䣬�ܹ������źŵľ�ȷ�ع���
�����㷨����ֹ����Ϊ֧�ż��ڵ�ԭ����Ŀ�ﵽһ��������Lmax�������ڱ�֤�����ع��ź�ʱ��һ����ԭ����Ŀ������ع����ȵ�ͬʱ��Ҳ��һ���̶����ֲ��˵��ź�ϡ��Ƚϴ�ʱ��������������϶ർ������������IJ��㣬����ԭ����Ŀ�ﵽһ���������㷨���ٽ��е������㣬�Ӷ���֤���㷨���ع�Ч�ʡ�
2.4 �㷨���輰����
���룺M��Nά�۲������Mά�۲�����y
������ع��ź�
1) �趨��ʼ����Ls����ʼ�� ����ʼ�в���
����ʼ�в���
2) ������������������
��1 ��ͬ��ֵ������Lena�ع�ͼ��ķ�ֵ�����
Table 1 PSNR of reconstructed Lena image with different threshold parameters dB
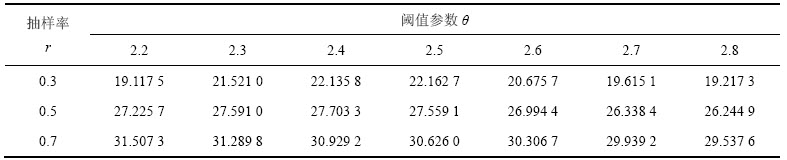
��2 ��ͬ��ֵ������Boat�ع�ͼ��ķ�ֵ�����
Table 2 PSNR of reconstructed Boat image with different threshold parameters dB

3) ����֧�ż������ԭ����Ŀ�������� ������ɢ���ұ任���ҳ����ܴ������ڻ�����������һ��ԭ�ӣ����趨����ԭ�ӵ���ĿΪ֧�ż���Ҫ����������ĿLmax��
������ɢ���ұ任���ҳ����ܴ������ڻ�����������һ��ԭ�ӣ����趨����ԭ�ӵ���ĿΪ֧�ż���Ҫ����������ĿLmax��
4) ͨ���趨����ֵ���������������У�����ȡֵ��ΧΪ[1,3]������2.6ʱ������ֵ����ͨ��һ��������ʳ�����ص����ӽ��� ������
5) �Լ���Js�е�ԭ�ӽ���Ԥ�������������жϣ�
�� ������Js�е�ԭ����ĿС�ڻ���ڵ�ǰ����Ls����ֱ�ӽ��벽��6)��
�� ������Js�е�ԭ����Ŀ���ڵ�ǰ����Ls����ȡ����Js��ǰLs����ֵ�����벽��6)��
6) ����֧�ż�����������С���˷�����֧�ż�Is�ϵıƽ�ϵ������xs����
7) ���²в�(����)��
8) �����ֹ���������ȣ����֧�ż�Isԭ����Ŀ�����ԭ����Ŀ����Lmax������ֹ����Σ������µ���������� (���У�OPTΪ������ޣ�ȡ10-5)����ֹ������
(���У�OPTΪ������ޣ�ȡ10-5)����ֹ������ ��������һ���Ҳ�������Ϊ
��������һ���Ҳ�������Ϊ ��ת�벽��4)��
��ת�벽��4)��
�㷨�в���1)~3)ͨ���Բ��������������DCT�任�����������˵�����֧�ż���Ҫ��������ԭ����Ŀ������4)ͨ���趨��ֵ��ѡȡһ����ԭ���γɺ�ѡ����ͨ������5)��ԭ��Ԥ������ʹ��ѡ��������ֵ˳���Ӧ�ڻ�Cs�дӴ�С����ֵ���Ӷ���֤�ڲ���6)����������ѡ����Ϊƥ���һЩԭ��������֧�ż�Is������6)��7)ʵ����������С���˷��ƽ�ԭʼ�źź������ĸ��£��ڲ���8)�У����ȼ���㷨�Ƿ���ֹ�����������һ�β����²�����ת�벽��4)��
3 ʵ����������
����ʵ���У�ϡ��任������ɢС���任DWT (discrete wavelet transform)���۲����Ϊ��˹�������(gaussian random matrix��GRM)����������˹�������(orthogonalized gaussian random matrix��OGRM)������ʹ�ý��ڸ�����ʵ��������˵�������ڱ��ĵķ������������������ϵı��������ۣ��Ը��㷨���ع�ͼ������������ۣ��÷�ֵ�����(dB)�������۸����㷨���ع����������ع�ʱ��(s)�������۸����㷨���ع����Ӷȣ����㷨�ķ�ֵ����Ⱥ�����ʱ���Ϊ200��ʵ���ƽ���������ʵ���ڿ��˫��2.20 GHz��2 GB�ڴ��PC���ϣ�ͨ��MATLAB R2010a������ɡ�
3.1 ��ͬ��ֵ�����������ź��ع����ܷ��漰����
����ʵ����ô�СΪ256��256��Lenaͼ��512��384��Peppersͼ��346��207��Canoeͼ���240��320��Footballͼ�������ԣ��۲����ֱ���ø�˹�������(GRM)����������˹�������(OGRM)��ȡ�̶��ij�����r=0.5����ֵ������ȡֵ��ΧΪ[1,3]��������������һ�£��ڲ�ͬ��ֵ���������£�StOMP�ͱ����㷨���ķ�ͼ����ع�������ͼ1��ʾ��
��ͼ1��֪������4������ͼ���۲����Ϊ��˹�������ʱ��StOMP�㷨����ֵ����Ϊ[2, 3]ʱ���нϺõ��ع�Ч�������۲����Ϊ��������˹�������ʱ��StOMP�㷨����ֵ����Ϊ[1.6, 2.4]ʱ���нϺõ��ع�Ч����������������㷨��ѡȡ��ͬ�Ĺ۲����ʱ���ڲ�ͬ��ֵ���������¾���StOMP�㷨���и��õ��ع�Ч�������ع�Ч����Ϊ�ȶ�����ˣ�������������㷨����ֵ������ѡȡ�ϻ���и��������ԣ��ܸ��õ�Ӧ����ͼ��������
3.2 ��ͬϡ����������ź��ع����ܷ��漰����
����ʵ��Ƚ�MP��OMP��CoSaMP��SAMP��StOMP�ͱ����㷨�ڲ�ͬϡ��������µ���ȷ�ع����ʺ��ع�ʱ�䡣���ó���ΪN=256�ĸ�˹ϡ���źţ�������ĿM=128��K��ȡֵ��ΧΪ[1, 80]���ڱ�����ʵ���У����۲����Ϊ��˹�������ʱ��StOMP�ͱ����㷨����ֵ����ȡֵ��Χѡ��[2, 3]�����۲����Ϊ��������˹�������ʱ��2���㷨����ֵ����ȡֵ��Χѡ��[1.6, 2.4]��2������¸�ȡ10����ֵ�������Բ�ͬ��ֵ�����µ���ȷ�ع����ʵ�ƽ��ֵ��Ϊ���㷨����ȷ�ع����ʡ������ź���ȷ�ع���ԭ�����ع��ź���ԭʼ�ź�x�еķ���Ԫ�ص�λ����ͬ�����Ҳв�����С��һ����ֵ��ȡ ��ʵ����MP��OMP��StOMP�㷨��ʵ�ֲ��õ���Sparselab�����䣬CoSaMP��SAMP�㷨�ο�����Compressive Sensing Resources��������۲����Ϊ��˹����������������˹�������ʱ�����㷨�ڲ�ͬ��ϡ����µ��ع����ܼ�ͼ2��ͼ3��
��ʵ����MP��OMP��StOMP�㷨��ʵ�ֲ��õ���Sparselab�����䣬CoSaMP��SAMP�㷨�ο�����Compressive Sensing Resources��������۲����Ϊ��˹����������������˹�������ʱ�����㷨�ڲ�ͬ��ϡ����µ��ع����ܼ�ͼ2��ͼ3��
��ͼ2(a)��֪�����۲����Ϊ��˹�������ʱ�������㷨����ȷ�ع��ʸ���MP��OMP��CoSaMP��StOMP���㷨����һ���̶��ϵ���SAMP�㷨��ͼ3(a)���������۲����Ϊ��������˹�������ʱ����
���㷨��MP��OMP��CoSaMP��StOMP�㷨���и��ߵ���ȷ�ع��ʣ���SAMP�㷨���ع������൱��ֻ����ϡ��ȴ���0.25ʱ�Ż��н϶����Ϣ���ܹ���ȷ�ع�����ͼ2(b)��3(b)��֪�����ò�ͬ�Ĺ۲����ʱ�������㷨ͨ�������������ԭ����Ŀ�������SAMP�㷨���ԣ������˹���ĵ������㣬����Ч��Զ����SAMP�㷨����StOMP�㷨�ع�Ч���൱���ɼ���������������㷨�����ϡ��Ƚϴ�ʱ���ź���ȷ�ع��ʣ������Dz�����������˹���������Ϊ�۲����ʱ�����и��õ�ϡ�������Ӧ�ԡ�
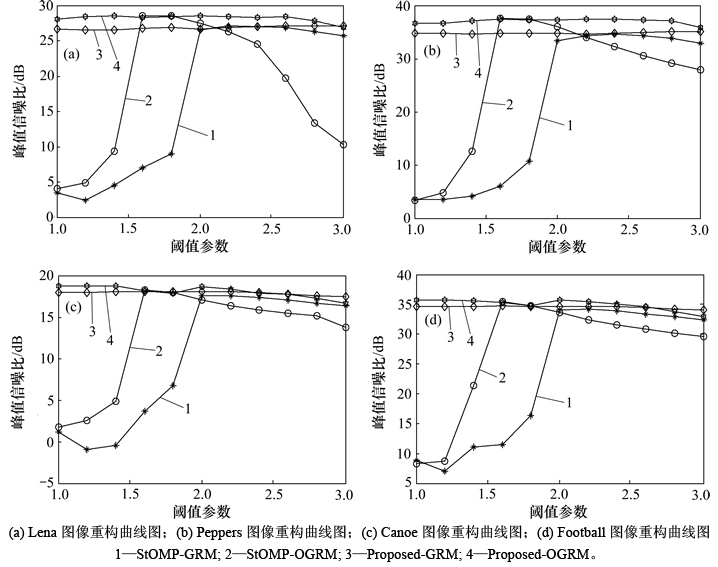
ͼ1 ��ͬ��ֵ������StOMP�ͱ����㷨���ع�����
Fig. 1 Reconstruction curve of StOMP and the proposed algorithm with different threshold parameters
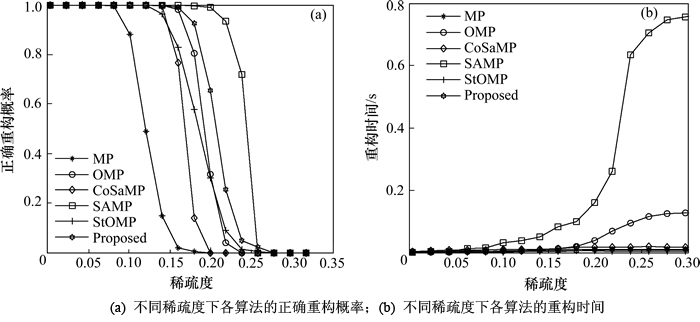
ͼ2 ���㷨���ڸ�˹����۲�����ڲ�ͬϡ����µ��ع�����
Fig. 2 Reconstruction performance of algorithms with different sparsity when sensing matrix is GRM
3.3 �㷨��ͼ�����е�Ӧ��
����ʵ����֤MP��OMP��CoSaMP��SAMP��StOMP�ͱ����㷨����ͼ�����е�ʵ���ԡ�����ͼ��ѡ��Lenaͼ������SAMP�ͱ����㷨�ij�ʼ����ȡֵ��ΪLs=9��StOMP�ͱ����㷨����ֵ������ȡ 2���۲�����������������˹�����������ȡֵ�ֱ�Ϊ0.4��0.5��0.6����������������һ�£�ͼ4��ʾΪ������r=0.5ʱ���㷨���ع�ͼ��3��ʾΪ��ͬ�������¸��㷨���ع����ܡ�
2���۲�����������������˹�����������ȡֵ�ֱ�Ϊ0.4��0.5��0.6����������������һ�£�ͼ4��ʾΪ������r=0.5ʱ���㷨���ع�ͼ��3��ʾΪ��ͬ�������¸��㷨���ع����ܡ�
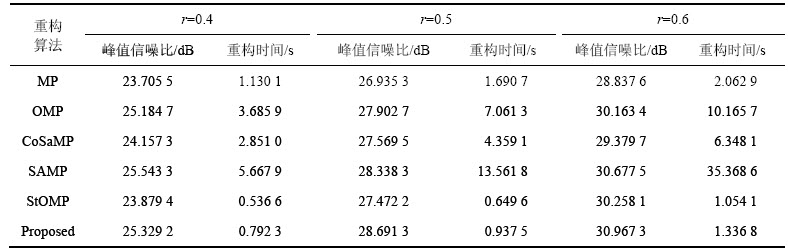
��ͼ4��֪�������㷨��SAMP�㷨���нϺõ�ͼ���ع�Ч�����ɱ�3��֪�����ع���ֵ����ȵĽǶ�����������ͬ�ij������£�SAMP�ͱ����㷨�ķ�ֵ�����Ҫ���Ը������������㷨�����У���r=0.5ʱ�������㷨��PSNR��StOMP�㷨�ķ�ֵ����ȸ�1.2 dB���ң���SAMP�㷨�ع������൱������Ҫ���������ڸ���֧�ż���ԭ�Ӷ�����Ϊƥ��ģ��������㷨�ܻ�ñ�StOMP�㷨���õ�ͼ���ع�Ч����������Ч�ʵĽǶ�����������ͬ�ij������£�StOMP�ͱ����㷨���ع�ʱ��ҪС�����������㷨���ع�ʱ�䣬���У������㷨���ع�ʱ��ҪԶԶС��SAMP�㷨���ع�ʱ�䣬����Ҫ������֧�ż��������ԭ����Ŀ�Ĺ��ƣ������SAMP�㷨���ܵ�������Ӱ���С���ұ����㷨���ع�ʱ���Դ���StOMP�㷨���ع�ʱ�䣬�������㷨������StOMP�㷨�ع����ӶȽϵ͵��ŵ㡣�ۺ���˵��������������㷨�ڱ�����ԭ�㷨�ϸ�����Ч�ʵ�ͬʱ�������˸��õ�ͼ���ع����ȣ���ͼ���������л���кܺõ�ʵ�����塣
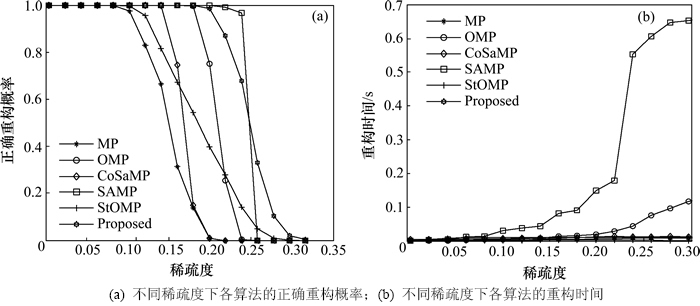
ͼ3 ���㷨������������˹����۲�����ڲ�ͬϡ����µ��ع�����
Fig. 3 Reconstruction performance of algorithms with different sparsity when sensing matrix is OGRM
��3 ��ͬ�������¸��㷨���ع����ܶԱ�
Table 3 Performance comparison of the algorithms with different sampling rate
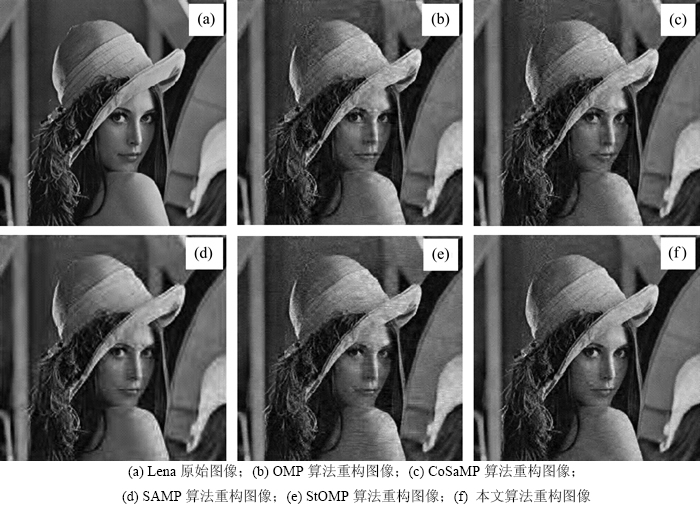
ͼ4 ��ͬ������r=0.5ʱ���㷨���ع�ͼ��
Fig. 4 Reconstructed image of algorithms with the same sampling rate (r=0.5)
4 ����
1) �����һ��ϡ�������Ӧ���ع����ܽϺõ�StOMP�㷨�����㷨���ȹ��Ƴ�ÿ�ε���ʱ֧�ż���Ҫ��������ԭ��������һ���̶��ϱ�֤���㷨���ع�Ч�ʣ�Ȼ��Խϴ����ֵ����ͨ��һ��������ʳ�����ص����ӽ���������ͬʱ���趨��ֵ��ѡȡ��ԭ�ӽ����Ż���������֤�����ڸ���֧�ż��ľ�Ϊ���ƥ��ĺ�ѡԭ�ӣ������ݵ�ǰ������ѡȡһ����Ŀ��ԭ�Ӹ���֧�ż���������������ͬʱʵ��ϡ��ȵıƽ����źŵľ�ȷ�ع���
2) ���㷨���������ź�ϡ��Ƚϴ�ʱ����ȷ�ع��ʣ����нϺõ�ϡ�������Ӧ�ԣ����ܺܺõؼ��ͼ���ع���Ч�ʺ;��ȣ���ͼ����������кܺõ�ʵ��Ӧ�ü�ֵ��
�ο����ף�
[1] DONOHO D L. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289-1306.
[2]  E J, WAKIN M B. An introduction to compressive sampling[J]. IEEE Signal Processing Magazine, 2008, 25(2): 21-30.
E J, WAKIN M B. An introduction to compressive sampling[J]. IEEE Signal Processing Magazine, 2008, 25(2): 21-30.
[3] TROPP J A, GILBERT A C. Signal recovery from random measurements via orthogonal matching pursuit[J]. IEEE Transactions on Information Theory, 2007, 53(12): 4655-4666.
[4] NEEDELL D, VERSHYNIN R. Signal recovery from inaccurate and incomplete measurements via regularized orthogonal matching pursuit[J]. IEEE Journal of Selected Topics in Signal Processing, 2010, 4(2): 310-316.
[5] NEEDELL D, TROPP J A. CoSaMP: iterative signal recovery from incomplete and inaccurate samples[J]. Applied and Computational Harmonic Analysis, 2009, 26(3): 301-321.
[6] DONOHO D L, TSAIG Y, DRORI I, et al. Sparse solution of underdetermined linear equations by stagewise orthogonal matching pursuit[J]. IEEE Transactions on Information Theory, 2012, 58(2): 1094-1121.
[7] DO T T, GAN L, NGUYEN N, et al. Sparsity adaptive matching pursuit algorithm for practical compressed sensing[C]// Proceedings of the Asilomar Conference on Signals, Systems and Computers. Pacific Grove, CA: IEEE Computer Society, 2008: 581-587.
[8] ���, �ų�, ����Ϊ, ��. ѹ�������������ع���[J]. ����ѧ��, 2011, 39(1): 142-148.
YANG Hairong, ZHANG Cheng, DING Dawei, et al. Theory of compressed sensing and reconstruction algorithm[J]. Acta Electronica Sinica, 2011, 39(1): 142-148.
[9] BARANIUK R. Compressive sensing[J]. IEEE Signal Processing Magazine, 2007, 24(4): 118-121.
[10] ������. ��ά���ݵ�ά��Լ���㷨�о�[D]. �Ϸ�: �й���ѧ������ѧ�Զ���ѧԺ, 2012: 36-39.
SU Yaru. Research on dimensionality reduction of high-dimensional data[D]. Hefei: University of Science and Technology of China. College of Automation, 2012: 36-39.
[11] ����, ���. ̰���㷨��ѹ����֪����[J]. �Զ���ѧ��, 2011, 37(12): 1413-1421.
FANG Hong, YANG Hairong. Greedy algorithm and compressed sensing theory[J]. Journal of Automation, 2011, 37(12): 1413-1421.
[12] ������, ʯ����, �, ��. ��Ϲ۲�ѹ����֪ͼ�����������[J]. ��ѧ���ܹ���, 2013, 21(3): 724-733.
WANG Liangjun, SHI Guangming, LI Fu, et al. Compressive sensing multiple description image coding with hybrid sampling[J]. Optics and Precision Engineering, 2013, 21(3): 724-733.
[13] CORMODE G, MUTHUKRISHNAN S. Combinatorial algorithms for compressed sensing[C]// Proceedings of the 40th International Conference on Information Science and Systems. Princeton, NJ: IEEE, 2006: 280-294.
[14] ����, ����, ������, ��. ���ھֲ�DCTϵ����ͼ��ѹ����֪�������ع�[J]. �Զ���ѧ��, 2011, 37(6): 674-681.
PAN Rong, LIU Yu, HOU Zhengxin, et al. Image coding and reconstruction via compressed sensing based on partial DCT coefficients[J]. Journal of Automation, 2011, 37(6): 674-681.
[15] BLUMENSATH T, DAVIES M. Iterative hard threshold for compressed sensing[J]. Applied and Computational Harmonic Analysis, 2009, 27(3): 265-274.
[16] BECK A, TEBOULLE M. A fast iterative shrinkage- thresholding algorithm for linear inverse problems[J]. SIAM Journal on Imaging Sciences, 2009, 2(1): 183-202.
[17] ���, ������, ���ܺ�. ����ѹ����֪�ı䲽������Ӧƥ�����ؽ��㷨[J]. ��ѧѧ��, 2010, 30(6): 1639-1644.
GAO Rui, ZHAO Ruizhen, HU Shaohai. Variable step size adaptive matching pursuit algorithm for image reconstruction based on compressive sensing[J]. Acta Optical Sinica, 2010, 30(6): 1639-1644.
[18] ���, ��Ρ, ���, ��. һ��ѹ�������е�ϡ�������Ӧ�ӿռ����㷨[J]. ����ѧ��, 2010, 38(4): 1914-1917.
YANG Cheng, FENG Wei, FENG Hui, et al. A sparsity subspace pursuit algorithm for compressive sampling[J]. Acta Electronoca Sinica, 2010, 38(4): 1914-1917.
(�༭ �Կ�)
�ո����ڣ�2015-03-28�������ڣ�2015-05-06
������Ŀ(Foundation item)�����ҿƼ��ش�ר����Ŀ(2010ZX03004-002-01) (Project(2010ZX03004-002-01) supported by the National Science and Technology Major Program of China)
ͨ�����ߣ��Ƴ�ΰ����ʿ(��)�����ڣ����¿��������ƶ���ý�塢������Ϣ�����ȷ�����о���E-mail:cwtang@cqu.edu.cn
ժҪ����Էֶ�����ƥ����(StOMP)�㷨��Ҫ�źŵ�ϡ�����Ϊ������Ϣ���ع����Ƚϵ͵��ص㣬���һ��ϡ�������Ӧ�ֶ�����ƥ�����㷨�����ȣ�ͨ���Թ۲�������ʼ�в�������õIJ������������������ɢ���ұ任�������֧�ż���Ҫ��������ԭ��������Σ�����������ʳ�����ص����ӶԽϴ����ֵ���������ʵ�����������ͨ���趨��ֵ��ѡȡ��ԭ�ӽ����Ż������������StOMP�㷨�Ŀ���²��ñ䲽���ķ���ʵ��ϡ��ȵıƽ����źŵľ�ȷ�ع���������������������������㷨���źŵ�ϡ��Ⱦ��кܺõ�����Ӧ���ԣ������ڱ����˽ϵ��ع����Ӷȵ�ͬʱ���и��ȶ����ع�������
[8] ���, �ų�, ����Ϊ, ��. ѹ�������������ع���[J]. ����ѧ��, 2011, 39(1): 142-148.
[9] BARANIUK R. Compressive sensing[J]. IEEE Signal Processing Magazine, 2007, 24(4): 118-121.
[10] ������. ��ά���ݵ�ά��Լ���㷨�о�[D]. �Ϸ�: �й���ѧ������ѧ�Զ���ѧԺ, 2012: 36-39.
[11] ����, ���. ̰���㷨��ѹ����֪����[J]. �Զ���ѧ��, 2011, 37(12): 1413-1421.
[12] ������, ʯ����, �, ��. ��Ϲ۲�ѹ����֪ͼ�����������[J]. ��ѧ���ܹ���, 2013, 21(3): 724-733.
[14] ����, ����, ������, ��. ���ھֲ�DCTϵ����ͼ��ѹ����֪�������ع�[J]. �Զ���ѧ��, 2011, 37(6): 674-681.
[17] ���, ������, ���ܺ�. ����ѹ����֪�ı䲽������Ӧƥ�����ؽ��㷨[J]. ��ѧѧ��, 2010, 30(6): 1639-1644.
[18] ���, ��Ρ, ���, ��. һ��ѹ�������е�ϡ�������Ӧ�ӿռ����㷨[J]. ����ѧ��, 2010, 38(4): 1914-1917.
