
Һѹ���ػ����ر���ϵͳ�����
����ƽ, ����ũ, ����, ���, �����
(���ϴ�ѧ ���繤��ѧԺ, ���� ��ɳ, 410083)
ժҪ: �����ֺܸ˻�����Ϊ����װ��, ����ȫ��е��Һѹ��ʽ, ������ת��, �о������һ��Һѹ���ػ��Ƿ����Զ���ѹϵͳ�� ϵͳ�����ֻ�����Ϊ���۽�λ���ź������ת���Ļ���, �����������۱���ǶȦ�ת��Ϊ��֮���Ӧ��ϵͳѹ��p1��Ҫ����ȵ�ʽ������������ѹ���ɵ�Ԥѹ����Xt2�� ���øܸ˻�����Ϊ����������ʵ����λ�ƵķŴ��Լ����������ƥ��, �Ӷ�����Xt2��ʵ�ֵ���ϵͳѹ��p1����۱���ǶȦ����Զ��������ڡ� ϵͳ�ĺ��IJ�����һ��ר���ȵ�ʽ������, �����ݿ����źŵ���ϵͳѹ��p1������, ʵ�ֻ���Һ��ת���� �ȵ�ʽ���������ò�ѹʽ�ṹ, ��������ڵ�ѹ��Χ�ĵ�ѹ�ȶ���, ���ɻ�ýϺõ���������, �Ӷ�ʵ������1����ѹ�����ڵ�������ѹ��3~17 MPa(����)��Χ�ڽ���������ѹ�� Һѹ���ػ��Ƿ����Զ���ѹϵͳ��ƵĹؼ�����ͨ�����ۼ���Ԥ��ȷ���ȵ�ʽ����������ѹ��p1���ȵ�����ѹ����Ԥѹ����Xt2�ĺ�����ϵ, ��Ϊ����ϵͳ��ƵĻ����� ʵ��������, ����Һѹ���ػ��Ƿ����Զ���ѹϵͳ���ԽϺõؽ��Һѹ���ػ�ʩ�����̿��ܳ��ֵĹ������⡣
�ؼ���: Һѹ���ػ�; �Ƿ����Զ���ѹϵͳ; �ȵ�ʽ������
��ͼ�����:TH137.7 ���ױ�ʶ��:A ���±��: 1672-7207(2005)05-0841-05
Design of over-load protecting system for hydraulic crane
HU Jun-ping, LIU Xing-nong, LUO Chun-lei, ZHU Gui-hua, WANG Ling-hui
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: An angle feedback pressure self-regulating system was studied and designed in a complete mechanical and hydraulic way without electric converting. A cam mechanism was used to input and convert the signal of the crane-arm��s angle changing. The input signal, i.e. the radius-changing angle �� of the crane arm is converted into the length reduction Xt2 of the pilot relief valve��s pressure regulating spring by the cam mechanism, which corresponds with the pressure p1 of the crane��s hydraulic system. The lever is designed as a proportional and amplifying part in order to coordinate the transmitted force and control the length reduction Xt2 and then accordingly control the pressure p1 continuously. The pilot valve��s type is in the difference-pressure form. It can improve the pressure regulating stability in the lower pressure range and realize the function of regulating the pressure of the hydraulic system at the range from 3 MPa to 17 MPa only with the same one spring of the pilot valve. To get the analytic function formula about the two variables, i.e. the regulated pressure p1 and the length reduction Xt2 in advance is the most important step in design. The results show that the angle feedback pressure self-regulating system for hydraulic crane can effectively solve the problem of angle feedback pressur self-regulating of hydraulic cranes.
Key words: hydraulic crane; angle feedback pressure self-regulating system; pilot relief valve
Һѹ���ػ��������������ʱ, ������Ҫ����γ���ˮƽ�治ͬ�ļн�(�����)���� ��Ӧ��ͬ����Ǧ�, ���ػ��в�ͬ�������, ��Խ��, ��������������MԽ�� ���, ��Ӧ��ͬ�Ħ�, M����Ӧ����ֵ, ������Ϊ���ء� ���ؽ������ػ�����ƻ���
Ŀǰ, ��Һѹ���ػ����ܳ��ֹ��ص������ȡ��һ�ֽ����ʩ���ڵ����ϰ�װһ��������������ͬʱָʾ������Ǧ��Ͷ�Ӧ�������������װ�á� ������ͨ���۲������ٹ��ƴ����������ʵ�ֶԸ�����Ľ���� ����Ϊ�Ĺ�������ʹ����Ǧ��ʹ��������M��ӦЭ��, ��ȷ������������ĵ��ۿ��·ŵı���ǡ� Ϊ��, ������������Һѹ���ػ��Ƿ����Զ���ѹϵͳ����ȫ��е��Һѹ��ʽ, ͨ���Ե���ϵͳѹ��������۽Ƕȵ��Զ�����, ����Ч��ֹ����������������
1 Һѹ���ػ��Ƿ����Զ���ѹϵͳԭ��
��ϵͳ���IJ�����һ������ϵͳѹ����ȫֵ�������������Ǧ������Զ����ڵġ��Զ���ѹ���������� �乤��ԭ��ʾ��ͼ��ͼ1��ʾ�� �Զ���ѹ������1Ϊר����Ƶ��ȵ�ʽ�������� ���������߷�ӳ�������Ǧ���Ӧ��ϵͳ��ȫѹ����Ҫ��ĵ�ѹ����Ԥѹ�����ĺ�����ϵ�� �����۱����Ϊijһ��, ����۹������ִ����ܸ˻���, ���Ƶ�ѹ���ɵ�Ԥѹ����, �Ӷ�����������ʹϵͳѹ������ֵ�����Ǧ����������M����Ӧ�� һ������ʹ����ѹ������ϵͳѹ������ֵ, ϵͳ������, �Ӷ���ֹ���صķ����� �ܸ����λ���������任����������״�������á�
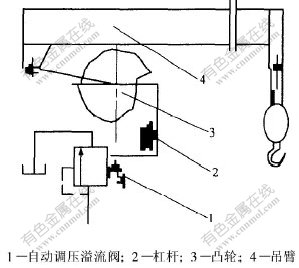
ͼ 1 Һѹ���ػ��Ƿ����Զ���ѹϵͳԭ��ͼ
Fig. 1 Principle diagram of angle feedback pressure self-regulating system
2 ϵͳ���
2.1 ���Ҫ�����������ṹ��ȷ��
�Ե�ǰҺѹ����ѹ����ͨ������QY16A��Һѹ���ػ�Ϊ��[1-3]�� �û��ṹ�ص㼰����Ҫ�����Ǧ����Ӧ�������M�Ͷ�Ӧϵͳѹ������p1�������º�����ϵ(�ú��������1��ʾ):
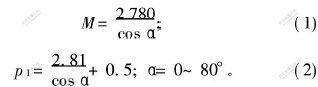
�� 1 ��������� ϵͳѹ�������ǵĺ�����ϵ
Table 1 Relationship between hoist capability,system pressure and changing angle respectively
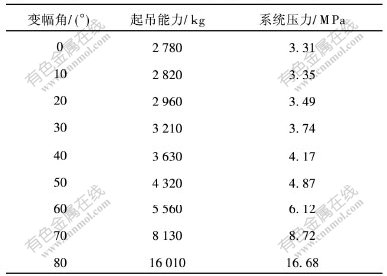
�ȵ�ʽ�������Ľṹ��ʽ��������ͬ��ʽ�����Ͳ�ѹʽ�ȵ����� ����ͼ��ͼ2��ʾ�� ��ʵ�ʹ����������������ܲ��������Ҫ������:
�����ѹ��pg=17.5 MPa,
���������Qg=200 L/min,
��ѹ��Χp1=3~17.5 MPa��
������ߵ���ѹ��ʱ:
����ѹ��p1Q=16.6 MPa,
�պ�ѹ��p1Q��=15.7 MPa,
�ȵ���������Q=1.1 L/min,
ж��ѹ��p1X��0.4 MPa��
�ȵ������ò�ѹʽ�ṹ�����ڲ�ѹʽ�ȵ�����о���ڳ�ѹ��������, �����ڷ�о�ϵ�Һѹ����ֱ��ʽС, ��Һѹ���͵�������ƽ�ⷽ��: p2a2=Kt2(Xt2+X2)�� ����, p2Ϊ����ǰǻѹ��, MPa; a2Ϊ�ȵ���о��ѹ�����; Kt2Ϊ��ѹ���ɸն�; Xt2Ϊ��ѹ����Ԥѹ����; X2Ϊ�������ڿ������� ������ǰǻѹ��p2һ��, �ʵ���С�ȵ���о��ѹ�����a2ʱ, ��ѹ���ɸն�Kt2��Ԥѹ����Xt2��ֵҲ����Ӧ��С, ��ʹ��ѹ���ɵ���ƱȽ�����, ������Kt2�ļ�Сʹ�������ĵ�ѹ��ֵ��С, ����˵�ѹ��Χ�ĵ�ѹ�ȶ���, �Ӷ��ڵ�ѹ����ѹ��Χ�ڿ��Լ��ٵ�ѹ���ɸ���[4-6]�� ͬʱ�ʵ����Xt2, ʹKt2��һ����С, �Ӷ�ʵ����1����ѹ������3~17.5 MPa��Χ���Զ�������ѹ��
ͼ 2 �������ṹͼ
Fig. 2 Structure diagram of pilot relief valve
2.2 ��������̬���Լ�����ṹ�ߴ����
��̬���Լ���Ŀ���Ǿݾ�̬����Ҫ��У�˺͵����ṹ�ߴ��Լ�����������������ɸնȺ�Ԥѹ������Ϊ����������ݡ� ���IJ���5�������ȵ�ʽ����������״̬�¾�̬���ԵĻ������������侲̬���Խ��м���, ���йؾ��鹫ʽ�� ����ֵ��ȷ���伸�γߴ�, ���ڼ����м�˶�̬���Զ���ز�����Ҫ��[7-9]��
�������ڽ�������:
![]()
����о����ƽ�ⷽ��:

�����������:

�������ڽ�������:
![]()
������о����ƽ�ⷽ��:
![]()
ʽ��: C1Ϊ������������ϵ��; D1Ϊ����о���ڴ�ֱ��; ��1Ϊ�����������ǰ��; X1Ϊ����������; gΪ�������ٶ�; ��Ϊ��Һ�ض�; Kt1Ϊ�������ɸն�; Xt1Ϊ��������Ԥѹ����; A2Ϊ����о�ϲ��ѹ���; A1Ϊ����о�²��ѹ���; Q2Ϊ���������; ��Ϊ��Һ�˶�ճ��; d0Ϊ�����; l0Ϊ����׳���; a0Ϊ��������; C2Ϊ������������ϵ��; d2Ϊ��������; ��2Ϊ������о�ǰ�ǡ�
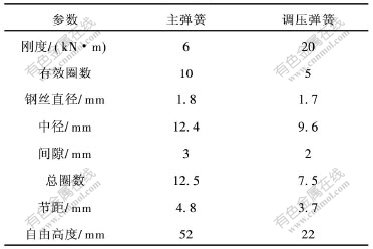
����о�¡� �ϲ��ѹ�����A1/A2�Է����������������������, ��ֵԽ��ɻ�ýϺõĿ������ܡ� ����о�����d0���䳤��l0��ȡֵͬʱӰ�췧���������ܺͶ�̬����, d0̫���Լ�l0̫��ʱ����������, �����˷�����������; ��֮, �������������, ȴʹ���Ĺ������ȶ�, ѹ���������Ӵ�, ��̬���ܱ��[10-12]�� �ݽṹ��Ʒ��������⾭��[13, 14], һ��Ҫ��A1/A2=0.95~0.98, d0=0.8~1 mm, l0=(7~19)d0�� Ϊ��֤�ﵽ����������������Ҫ��Ӧ��X2Q/Xt2��0.01, (Kt2��Xt2)/(a2p1max)��0.85�� ʽ��, X2QΪϵͳѹ��Ϊ����ѹ��ʱ�ȵ���о������p1maxΪ������ѹ���� ����ȡA1/A2=0.95, d0=1 mm, l0=7 mm�� ��ǰ���������Ҫ�����ֵ����ʽ(3)~(7)�н��о�̬���Լ��㲢ȡ��Һ�˶�ճ�Ȧ�=68 mm2/s(N68��ճ��ĥҺѹ��), ��������ϵ��C1=0.8, C2=0.77, �����X2Q/Xt2=0.004, (Kt2Xt2)/(a2p1max)=0.876�� �����͵������ɸն��Լ�Ԥѹ����������о���ȵ���о��ϵͳѹ��Ϊ����ѹ��ʱ������ƽ�ⷽ��(4)��(7)���: Kt1=6 kN/m, Xt1=16.2 m, Kt2=20 kN/m, Xt2=7.22 mm; 2�����ɾ�Ϊ����Բ��������ѹ������, �˲��ṹ����YI-3��ʽ, ���ϲ���̼�ص��ɸ�˿I�顣 ����õ�����Ҫ�������2�ͱ�3��ʾ��
2.3 ϵͳ���Ʋ������
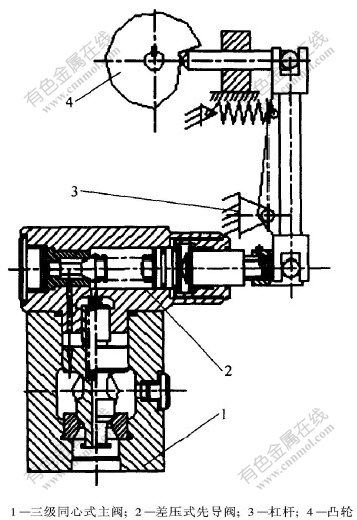
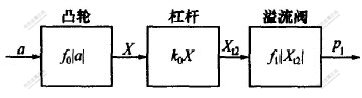
���Ʋ��ֲ��ÿ�������ϵͳ, ���ֺܸ˻�����ɡ� ����ϵͳ����ͼ��ͼ3��ʾ�� ���ݿ���Ŀ�꺯��(1), ����ѹ��p1�ļ��㹫ʽΪ[14, 15]:
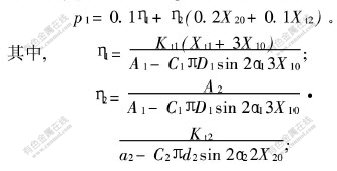
X10��X20�ֱ�Ϊ��ߵ���ѹ��p1max������о��������͵����������� �ɾ�̬���Լ������X10=525 ��m, X20=19 ��m; �����������ѹ���Ǽ���ȷ���ܸ˱���ϵ��K0=1/3; ���������ڴ��ݺ�������ʽ���¡�

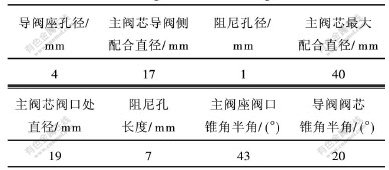
�� 2 �ȵ�ʽ�������ṹ����
Table 2 Structure parameters of pilot relief valve
�� 3 ������Ʋ���
Table 3 Spring parameters
ͼ 3 ����ϵͳ����ͼ
Fig. 3 Principle diagram of control system
�����ʱ, ��Ӳ��Ϻ����ϱ�֤�������ȼ���������״���� Ϊ��С�ܸ˻����������任�ķ��������, �ܸ����˽ṹ������ͼ2��ʾ���ڲ�����ʽ��
3 ʵ����֤
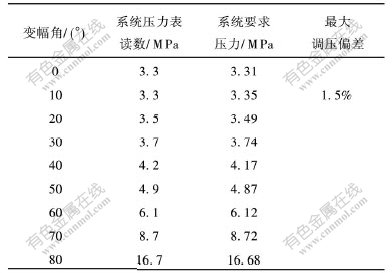
��Һѹ���ػ��Ƿ����Զ���ѹ������װ������Һѹ����̨���й��ܺ�����ʵ��, ����λ�ڳ�ʼת��0��(�൱�ڵ��۴���ˮƽλ��)ʱ, �����ȵ�����ѹ����ѹ�˶˵ĵ����ݶ�ʹϵͳѹ��������Ϊ3.3 MPa, Ȼ��ת����ʹ��ת��(������Ǧ�)�ֱ�Ϊ10��~80�㡣 ��ϵͳѹ�����������ʵ����, ���4��ʾ�� �ɼ�, ʵ������ϵͳ����Ŀ���൱�Ǻ�, ����ѹ������2%��
�� 4 ʵ����
Table 4 Test results
4 �� ��
a. Һѹ���ػ��Ƿ����Զ���ѹϵͳͨ��ר������ȵ�ʽ������, ���ò�ѹʽ�ȵ����ṹ, ʵ����һ����ѹ�����ڵ���ϵͳѹ���仯��Χ�ڽ��е�ѹ��
b. �����ۼ���ȷ������������ѹ���Ե�ѹ����Ԥѹ�����ĺ�����ϵ����ƵĹؼ�, ����, �ص��ǵ�ѹ���ɸնȼ�ȷ��Ԥѹ������
c. �����ֺܸ˻�����Ϊ����װ�á�
d. ����Һѹ���ػ��Ƿ����Զ���ѹϵͳʵ����ϵͳѹ��p1�����Ǧ����Զ�����, ���ԽϺõؽ��Һѹ���ػ�ʩ�������п��ܳ��ֵĹ������⡣
�����:
[1]�Ź���, ������. QLY25ȫҺѹ�������ػ���Һѹϵͳ[J]. ���������е, 2001, 28(9): 24-25.
ZHANG Guo-li, SHEN Min-jian. Hydraulic system of new QLY25 fully hydraulic truck crane[J]. Hoisting and Conveying Machinery, 2001, 28(9): 24-25.
[2]����. 160t������ʽ��·���ػ�Һѹϵͳ�����[J]. Һѹ������, 2001, 39(7): 3-6.
LIU Yang. 160t telescopic railway crane hydraulic system design[J]. Chinese Hydraulics & Pneumatics, 2001, 39(7): 3-6.
[3]�Դ���. ���ػ�Һѹƽ���·�ĸĽ�[J]. ���������е, 2000, 27(8): 33-35.
ZHAO Chun-hong. Improvement of hydraulic balancing circuit for crane[J]. Hoisting and Conveying Machinery, 2000, 27(8): 33-35.
[4]����ƽ, ë����, ��Сƽ. �õ�ѹƫ��Ϊ�����������߱ø�Һѹϵͳ��������[J]. Һѹ������, 2001, 39(4): 15-17.
HU Yan-ping, MAO Zheng-yu, HU Xiao-ping. Improving the performance of the pump-cylinder hydraulic system by using zero override relief valve[J]. Chinese Hydraulics & Pneumatics, 2001, 39(4): 15-17.
[5]������, �����. Һѹ����ϵͳ�����о�[J]. Һѹ������, 2001, 39(7): 7-9.
ZHOU Kun-min, YAN Xiang-jie. Research on characteristics of hydraulic system[J]. Chinese Hydraulics & Pneumatics, 2001, 39(7): 7-9.
[6]���ﻪ. �����Կ�������[J]. Һѹ������, 2000, 38(5): 44-46.
WANG Yang-hua. The pressure relief valve made by oneself[J]. Chinese Hydraulics & Pneumatics, 2000, 38(5): 44-46.
[7]����ɽ, ����, �º��. ˫�������������Ե�ʵ���о�[J]. ��������ѧ������ѧѧ��, 1988, 30(4): 1-7.
ZHAO Shu-shan, MA Bai, CHEN Hong-cai. A study and test of double-outlet relief valve characteristics[J]. Journal of Harbin University of Science and Technology, 1988, 30(4): 1-7.
[8]����, ������, ����. Һѹ����[M]. ����: ���������, 2002.
FANG Gui-hua, WANG Jian-xin, ZHANG Yu-bao. Hydraulic Transmission[M]. Beijing: Earthquake Press, 2002.
[9]Dransfield P. Hydraulic Control Systems����Design and Analysis of Their Dynamics[M]. Beijing: Science Press, 1987.
[10]���ƽ, ������. Һѹ���ػ������·�ļ������̬����[J]. ������е, 1998, 16(3): 23-25.
YANG Guo-ping, SHU Lin-qiu. Computer dynamic simulation of radius-changing hydraulic circuit for hydraulic crane[J]. Construction Machinery, 1998, 16(3): 23-25.
[11]֣��÷. ����ֱ��ʽ������˲̬��Ӧ�ļ���ͼ��[J]. ����, 2001, 25(5): 12-16.
ZHENG Hong-mei. Bond graph method for the emulation of direct-acting spillover valve��s transient response[J]. Valve, 2001, 25(5): 12-16.
[12]����ƽ, ë����. ��������̬��ѹƫ���Һѹ�������������ܵ�Ӱ��[J]. ��ɽ��е, 2001, 26(6): 48-49.
HU Yan-ping, MAO Zheng-yu. Effects of overflow valve stability pressure governing deviation on control performance of hydraulic hoist[J]. Mining & Processing Equipment, 2001, 26(6): 48-49.
[13]������. Һѹ���ļӹ�����[J]. Һѹ�������ܷ�, 2001, 38(6): 38-39.
WEN Zheng-min. Technique of hole machining in hydraulic valve[J]. Hydraulics, Pneumatics & Seals, 2001, 38(6): 38-39.
[14]�κ�Ң, ����Ң. Һѹ����������[M]. ����: ��е��ҵ������, 1979.
SONG Hong-yao, DING Zhong-yao. Design and Calculation of Hydraulic Valve[M]. Beijing: Mechanical Industry Press, 1979.
[15]������. �ı���������ѹ��Χ�ļ������㷽��[J]. ��е����, 2001, 39(1): 50-52.
ZHANG Ming-song. A simple calculating method to change pressure regulating range of overflow valve[J]. Machinery, 2001, 39(1): 50-52.
�ո�����:2004-11-26
������Ŀ:����ʡ�Ƽ�������Ŀ(04GK3041)
�����:����ƽ(1965-), ��, ����������, ����, ��ʿ, ��ʿ����ʦ, ����Һѹ��е����Ƽ����о�
������ϵ��: ����ƽ, ��, ����, ��ʿ����ʦ; �绰: 0731-8876944(O); E-mail: hydr@mail.csu.edu.cn
[1]�Ź���, ������. QLY25ȫҺѹ�������ػ���Һѹϵͳ[J]. ���������е, 2001, 28(9): 24-25.
[2]����. 160t������ʽ��·���ػ�Һѹϵͳ�����[J]. Һѹ������, 2001, 39(7): 3-6.
[3]�Դ���. ���ػ�Һѹƽ���·�ĸĽ�[J]. ���������е, 2000, 27(8): 33-35.
[4]����ƽ, ë����, ��Сƽ. �õ�ѹƫ��Ϊ�����������߱ø�Һѹϵͳ��������[J]. Һѹ������, 2001, 39(4): 15-17.
[5]������, �����. Һѹ����ϵͳ�����о�[J]. Һѹ������, 2001, 39(7): 7-9.
[6]���ﻪ. �����Կ�������[J]. Һѹ������, 2000, 38(5): 44-46.
[7]����ɽ, ����, �º��. ˫�������������Ե�ʵ���о�[J]. ��������ѧ������ѧѧ��, 1988, 30(4): 1-7.
[8]����, ������, ����. Һѹ����[M]. ����: ���������, 2002.
[10]���ƽ, ������. Һѹ���ػ������·�ļ������̬����[J]. ������е, 1998, 16(3): 23-25.
[11]֣��÷. ����ֱ��ʽ������˲̬��Ӧ�ļ���ͼ��[J]. ����, 2001, 25(5): 12-16.
[12]����ƽ, ë����. ��������̬��ѹƫ���Һѹ�������������ܵ�Ӱ��[J]. ��ɽ��е, 2001, 26(6): 48-49.
[13]������. Һѹ���ļӹ�����[J]. Һѹ�������ܷ�, 2001, 38(6): 38-39.
[14]�κ�Ң, ����Ң. Һѹ����������[M]. ����: ��е��ҵ������, 1979.
[15]������. �ı���������ѹ��Χ�ļ������㷽��[J]. ��е����, 2001, 39(1): 50-52.
