
DOI�� 10.11817/j.issn.1672-7207.2020.09.015

��������������ֵ������3D����ͼ��ȥ���㷨�о�
̷��1������1���η�2���ܲ���1
(1. ���ϿƼ���ѧ ��Ϣ���������ѧԺ������ ��̶��411201��
2. �㶫�������ܿƼ�����˾���㶫 ���ݣ�510600)
ժ Ҫ��
��Ʒ�ߴ�AOI(automated optical inspection���Զ���ѧ���)��������3D������ϵͳ����ͼ������������ƽ��������ʸߵ����⣬�Ӽ���ԭͼ������̽����ԭ�������������ֵ����ʽ�Ĺ⻬�ԣ��о���������������ֵ������3D����ͼ��ȥ���㷨�����㷨����Ϊ�����ȷ���3D��������ǻ�ȡͼ��Ĺ��̣��ӻ�õ�ͼ���з��벢��ȡ2D��Ϣ��Ȼ��ͼ������������жϿ��������㣬�����ÿһ����λ��Ϊ�����ꡢ����ֵΪ�����꣬��������������ֵ���������������ʵ�����ء��о������������������㷨����������㷨��ȣ��ܹ��ڱ�����Ե���Ժ�������Ϣ��ͬʱ�����õ�ȥ�����������㷨ʵ����ǿ���ܼ������У������߹���Ч�ʡ�
�ؼ��ʣ�
3D������ȥ��������������ֵ������������ƽ��ȼ����
��ͼ����ţ�TP391.41��U472.9 ���ױ�־�룺A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±�ţ�1672-7207��2020��09-2496-08
Research on 3D laser image denoising algorithm based on three splines inter polation function
TAN��Wen1, FANG��Miao1, DUAN��Feng2, ZHOU��Bowen1
(1. College of Information and Electrical Engineering, Hunan University of Science and Technology,Xiangtan 411201, China;
2. Guangdong Jiaming Intelligent Technology Co. Ltd., Guangzhou 510600, China)
Abstract: Aiming at the problem of high misjudgment rate of pin flatness caused by unclear image in 3D laser detection system of USB-C product size AOI(automated optical inspection) production line, according to the original laser image, a 3D laser image denoising algorithm based on three splines interpolation function was studied combined with the smoothness of cubic spline interpolation polynomial. Firstly, the process of acquiring image by 3D laser measuring instrument was analyzed, and then 2D information was separated and extracted from the acquired image. Then, the suspicious noise points were judged one by one in the image detection area. For each row, the position was the horizontal ardinate and the pixel value was the longitudinal coordinate. The cubic spline interpolation function was used to calculate the actual pixel value at the noise points. The results show that, compared with the recent fractional integration algorithm, the noise can be removed better by the proposed method which can retain edge characteristics and texture information.The proposed algorithm is practical, and it can reduce misjudgments and greatly improve production efficiency.
Key words: 3D laser; denoising; three splines interpolation; fractional integration; flatness detection
���ŵ��ӹ�ҵ�ķ��ٷ�չ��������ҵ�����������ң������˲�Ʒ�ĸ��»����������쾫�ȵ�Ҫ����������������3D����ɨ��[1-2]���Ի�ȡ����������������ΪĿ�ĵ�һ�ֳ���������һ�� CCD(charge coupled device)������ȣ�������ά����[3]ɨ���ȡ��ͼ�������ḻ���ֱ��ʸߣ���ʵ�����������й㷺ʹ�á���USB-Cת����ͷ�����ƽ��Ƚ��в���ʱ�������ƽ�����������Χ������ɶ�·��·���ϣ�Ӱ�칤�����ܣ�Ϊ�ˣ������з������������Ӿ����ϵͳ�������ߣ�����ֹ���Ч�ʵ͡������ʸ��Լ�OGP(��ѧӰ�������)�ٶ��������⡣��ʵ�����������У��ڼ���ͼ���ȡ(���ֻ�����)�ʹ����������������ܵ������������������¶ȡ���е�������ĸ���[4]��ͼ������ͨ�����㲻�˼��Ҫ�̶�Ӱ��һϵ�к�������������ͼ��λ���ָ��ȡ�ȣ��Ӷ����3D������ϵͳ���С�Ϊ�˼��������ʣ������ͼ����������Ҫ��ͼ�����ȥ��Ԥ��������20���Ϳ�ʼ���������о��߶�ͼ��ȥ�뷽���������о�����Ҫ��Ϊ�ռ���ȥ�뷽����Ƶ����ȥ�뷽��������[5]��Ƶ�������ø���Ҷ�任��С���任[6]�ȼ���������ͼ���ʱ��ת����Ƶ�÷�����ʵ���ǽ�����ͼ��ת��Ϊһϵ�е�Ƶ��Ƶ�źŷ�������������ͼ���������źź����ݵ�ϸ�������ֱ�ֲ��ڸ�Ƶ�͵�Ƶ���֣���Ƶ����ͨ��Ѱ��ͼ����Ƶ�ķֲ����ɣ��Ըߡ���Ƶ�źŲ��ò�ͬ�Ĵ�����ʽ��ʹ������ͼ���������ݵ�ϸ�������ֿ����Ӷ��ﵽȥ���Ŀ�ġ�Ȼ��������ʵ�����£���ͼ���Ƶ���еĸ�Ƶ��������������ϸ�������ĵ�Ƶ���ݣ��ڵ�Ƶ����Ҳ���ں������ĸ�Ƶ���ݣ���ˣ����ø÷���ȥ�벻���������ܵõ���Ч������������ɲ���ͼ������ϸ�ڶ�ʧ���ռ���������ֵ�˲����Ǿֲ���ֵ�˲�������������ɢ�㷨��˫���˲��ȷ������˲������;�ֵ�˲�����˹�˲�������ͬ����ɢ�㷨�������˲�����[7]�����У���ֵ�˲���ȥ��ʱ����ͼ���ÿ�����ؽ�������Ӧ�ļ�Ȩƽ������������ͼ���Ե���������������������ģ����AHMED��[8]����˷Ǿֲ���ֵȥ���㷨������ͼ�������������Ϊͼ��ȥ�����Ҫ�ֶΡ����㷨���кܺõ�ȥ��Ч�����ǿ��ϸ�ڱ�����������������Ч��ƫ�͡�����������ɢ�㷨(PM)[9]��������ѧ��ɢ��˼�룬��һ���̶��ϱ�����ͼ��ϸ����������ʵ���ϸ÷������ò�ͬ�߶ȵĸ�˹�˲��������˲����������������������ͱ�Ե��Ϣ����������ֵ�˲���[10]�ڱ�����ͼ���Ե��Ϣ��ͬʱ��Ҳ��ʹ������Ϣ��ʧ�������Ӿ�ģ��������������Բ�ͬ���������һ��ȱ�ݣ�Ϊ�ˣ�������[11-12]��Լ���ͼ������˻��ڷ������ֵ�ȥ�뷽����������źŸ�Ƶ�ɷֵ�ͬʱ��Ҳ��һ���̶��ϱ�����ͼ���Եϸ���Լ�������Ϣ��Ч�����ԡ�����ʵ�������У��˷������Ա���ֲ�ʧ�棬��������ο��١���ȷ���������ֵĽ����ϴ���һ���Ѷȡ��������ߴӸ��ӵļ���ͼ�����Գ���������3D���������ǵ�ɨ�����ԭ��������������3D����������л�ȡ2D��Ϣ�����һ�ֻ�������������ֵ�����ļ���ͼ��ȥ�뷽��������֤����Ч�Ժ���Խ�ԡ�
1 3D���������ǵ�ɨ�����ԭ����2Dͼ����Ϣ����ȡ
3D���������Dz������Dz���ԭ����ȡ����ʵ�ʳߴ�[13]����ͼ1��ʾ����ɨ�����а뵼�弤�������۹�����1��������������ڱ�������棬�γ�1����ߣ��ѹ������������������뼤������ij�Ƕȵ���һ��������ɼ�������ͼ����ͼ2��ʾ�����У�a��b�ֱ��ʾ��������ο�ƽ�漰�������֮��ľ��롣��������Ż�е�����ƶ������ͨ���������ղɼ������һϵ��������ͼ�������ƴ����������ͬ�߶��ò�ͬ��ɫ��ʾ���������γ���1������ͼ�Ρ����ڸ߾��ܲ���ϵͳ��ͼ���ܽ��о���λ������Ҫ������λ����ȷ��������Ӿ�����ϵͳ��ʹ�����ٸߣ�Ҳ���������Ҫ������3D�����������γɵIJ�����ͨ�Ҷ�ͼ���Ǿ��������Ϣ�ĸ߶�ͼ����ˣ���3Dͼ������ȡ2D��Ϣ���ھ���λ��˵�������Ҳ����ؼ���һ������ϵ��3D���������ǹ��ܵ��������ӡ�
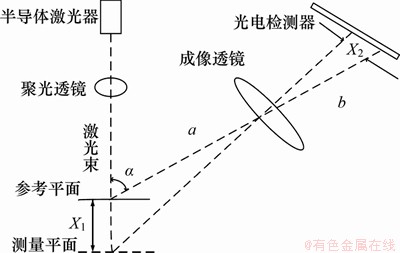
ͼ1���������Ƿ�����ԭ��
Fig. 1��Principle of laser triangulation
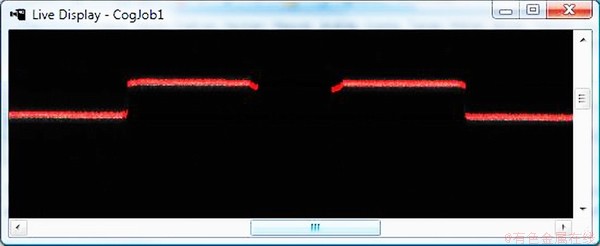
ͼ2������������ͼ��
Fig. 2��Image of laser contour
��3Dͼ������ȡ2D��Ϣ����[14]�������£��������Dz��������ص㣬3D������������ͼ��ɼ������У�ijЩ��λ���������׳��ֶ�ʧ�������ԣ����Ȳ��ò�ֵ���ֲ���ʧ�����أ���������2D��Ϣ����ȡ�����ڲ�ֵ���ֲ���ʧ������


����








Ϊ�˱���ת�����������ĸ��ţ�������ֵ�˲������߶�ͼ���в��ֲ�����Ȥ���ص㣬���巽����ʽ(2)��ʾ��

����


��Σ�������ĸ߶�ͼ�����ÿռ�任ת��Ϊ��֮��Ӧ�ĸ߶����ݻҶ�ͼ��������ûҶȽ�ȡ�㷨��ȡ��ͨ�Ҷ�ͼ�ҶȽ�ȡ�㷨Ϊ

ʽ�У�
���ˣ���ɴ�3D�߶�ͼ������ȡ��2D�Ҷ���Ϣͼ��Ϊ�˴ﵽ���õ�ת��Ч��������ʵ�ʲ�������Ҫ��һ�����ø�˹��ͨ�˲������㷨����Ԥ��������

���У���Ϊ�����������ñ�Ե������ӽ���������ȡ�����Զ��������и���ȷ��λ���߶�ͼ��ת���ɻҶ�ͼ��Ч����ͼ3��ʾ������3D���������Ǹ߶ȷ���Ϊ0.001 mm����ƽ��Ȳ������ȿɱ�����0.01 mm���ڡ�
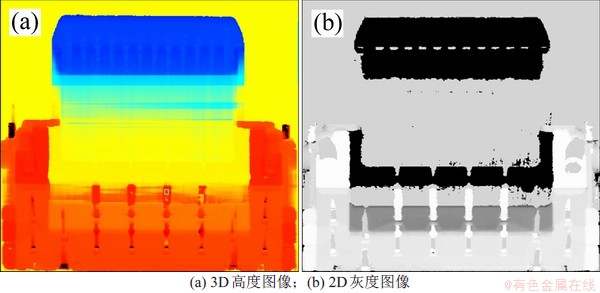
ͼ3���߶�ͼ������ת���ɻҶ�ͼ��Ч���Ա�
Fig. 3��Effect comparison of height image converted into gray image
2 ����������ֵ����ȥ���㷨
2.1�����������ļ���봦��
©���ʺ����������������㷨[15]���ܵ�����ָ�꣬���У�©����Ϊδ����������������������ʵ���������������ı�ֵ�������ָ����δ�ܵ�������Ⱦ������㷨��������Ϊ����������������ʵ���������������ı�ֵ��������������������㷨��©���ʺ�����ʽϵ͡����������㷨�ڲ��������������źŵ�Ļ����ϣ���ͼ���е�ÿ�����ؽ��л�����Ĥ��������Ϊ�䴦�������������㣬����©����Ϊ0�������㷨ģ����ͼ���ϸ�ڣ�������ʺܸߡ����������⣬�����ڽ���ȥ��ǰ���ȶ����������źŵ�������֡�
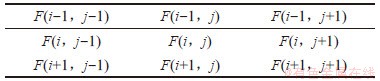
һ��أ�ͼ���������һϵ�лҶȽӽ������������ص㹹�ɣ����������Լ�ֵ�����ʽ������ͼ���У�����һ���ּ�ֵ�㲢���������㣬����ͼ���ϵı�Ե��(�źŵ�)��Ϊ���ڱ���ͼ���Ե��Ϣ�Ļ����ϸ���ȷ�ؼ���������������뵼���ĸ����ͼ������ijһ��(i��j)��������(3��3����)���ػҶ����1��ʾ��
��1��3��3�������ػҶ�
Table 1��3��3 neighborhood pixel
Ҫ�жϱ�1��
����


2.2����������������ֵ����ȥ��
���ż���������ķ�չ������������ֵ�����ѹ㷺Ӧ���ڼ����������ơ�ͼ�δ�����������Ϣϵͳ��ʵ����������Լ�������Ӿ��ȷ��档
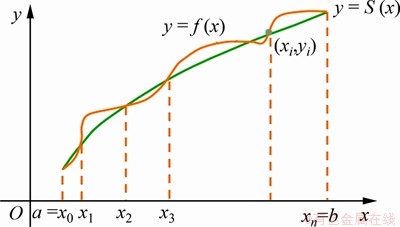
ͼ4������������ֵ����
Fig. 4��Cubic spline interpolation function
����������ʲ������ͼ4��ʾ������������ֵ����[16]����Ϊ����




��) ��ÿ��������
��) 
��) 

������������)�͢�)�ĺ�����Ϊ�ڵ�
��������)֪��

ʽ(6)�У�Ҫȷ��n��С�����ϵ���������������Ҫȷ��4n������������

����3n-3����������������(��)�ɵ�n+1����������������4n-2��������ȷ��


ԭ���ϣ���������
��






����
�����

���ò�ֵ����




��ʽ(11)����

��ʽ(11)��֪����

����ʽ(12)��ʽ(13)��֪��




����ʽ(13)~(15)���ɵ�ʽ(16)��n-1�����̣�


����

����Խ�ʽ(16)��Ϊ

ʽ(18)�У�n



��


���Ľ������㴦��������Ϊδ֪��������֪���źŵ�����f(x)�������������ʵ����S(x)���Ӷ��ﵽȥ��Ч��������ʽ(17)��

3 ʵ���������
3.1��ʵ�����
��3D����ƽ��Ȳ���ϵͳ����1�����������Ŷ����ƽ������е�ͼ������ȡ2D��Ϣ�����������ͼ5(a)��ʾ����Ϊ����ܹ�ע������ΪUSB-C��4����Ŵ�����ֻѡȡ�ܹ�ע������Ϊ�о�������ͼ5(b)��ʾ������ͬʵ�������£�ѡ���ֵ�˲����������ַ���������������ֵ������������ȥ��Ա�ʵ�顣
3.2����������
3.2.1���������ۡ�
�������ֺͱ���ȥ�뷽�������ͼ6�ͱ�2��ʾ����ͼ6�ͱ�2�ɼ���
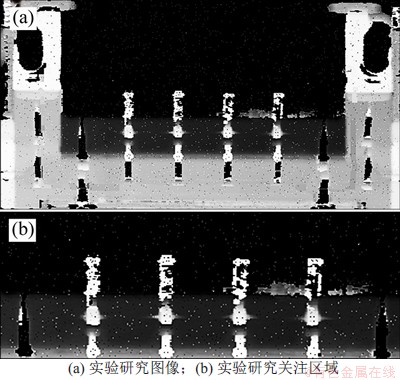
ͼ5��ʵ���о�ͼ��������
Fig. 5��Images and resions for experimental research
1) ��ֵ�˲�ȥ��Ч�����Խϲͼ������ƫģ�������������㷨��Ȼ�ܴﵽ�Ϻõļ���ͼ��ȥ��Ч����������Ŵ�����ʧ�棬�Դ��ڸ�����������һЩ��Ҫ�����ص㸲�ǣ���Եģ�������ɱ���ȥ�뷽������ͼ��������������Լ��٣�ȥ��Ч���ͱ��ֱ߽��������ǿ���������طֱ�ͼ��������
2) ��ֵ�˲��ͷ�������ȥ��ֱ��ͼ���ֻҶȼ��϶࣬�ҷֲ�����������ֱ�۵����ֱ�Ե���������ԡ�������ʹ�õķ����Ҽ����٣��ҶȺϲ��������������ԣ���ȥ��������ͬʱ���ܹ������Ϻõı�Ե��������Ϣ������������塣
3) ��ͼ�����������۱�[20]�����������ķ������и��߷�ֵ����Ⱥͽṹ���ƶȣ����Ҵ���ʱ��Ҳ��������(��Ȼ��ֵ�˲�������ʱ�����Կ죬����ȥ��Ч�����)��
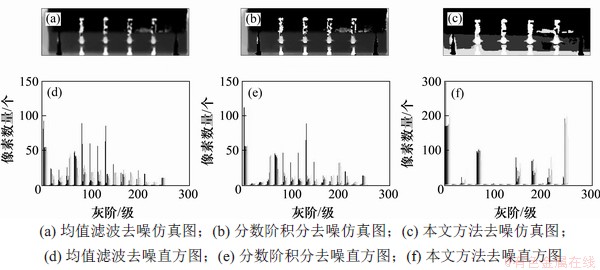
ͼ6��ȥ�����Ч��
Fig. 6��Denoising simulation results
��2��ȥ������ָ��Ա�
Table 2��Comparison of denoising performance indicators

3.2.2��ʵ�����������
�ֱ��ķ������������֡���ֵ�˲���3�ַ���Ӧ����AOIƽ��ȼ��ϵͳ�����ߣ��õ���ͼ7��ʾ�������ͼ7�ɼ���
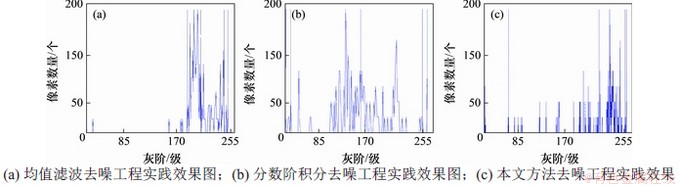
ͼ7��ȥ��ʵ��Ч��
Fig. 7��Effect diagrams of denoising practice
1) �������ֵIJ���ͼ�Ƚ�ɢ�ң����طֲ�����ƽ��ֵƫС���ɼ����طֲ������ɣ�����ȥ��IJ���ͼ�����طֲ�����ƽ��ֵ�ϴ�����������Էֲ����У���ֵ�˲��IJ��ζ��������Ҳ࣬ͼ��ֱ治���������Ҳ�����Ե����ˣ�ͼ��ģ����
2) �ɱ��ķ����������ػҽײ�ֵ�ϴ��ڰ�������Ȼ��һ���̶��ϱ�Ե�����ػҽϽӽ�������ȫ��Ӱ���⡣
3) ���ķ����������ػҽ����Ը��ڷ������ֺ;�ֵ�˲��е��������ػҽף����ֳ����ķ�������Խ�ԡ�
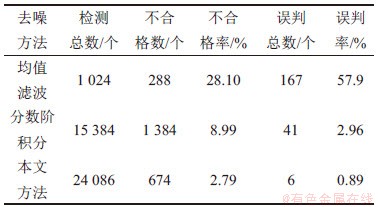
3.3��ȥ�뷽���ȶ�����ͳ��
ȥ���㷨ֻ��ͨ���궨�ﵽ�ͻ�Ҫ��ʹ�ã���������ԭ���ķ��������������̡���3��ʾΪ3D�����Ӿ����ϵͳ��������ȥ�뷽���ȶ�����ͳ�ƣ����У���������ָ�ͻ����ñ궨����OGP��3D�������豸�϶��IJ��ϸ�Ʒ����ѡ���ϸ�Ʒ��ռ�ı��ʡ��ӱ�3�ɼ�������ȥ�뷽��Ч����������������Ч�ʴ����ߣ���Ȼ������һ�������У�������ͻ�������С��1%��Ҫ��
��3����ͬȥ�뷽���IJ���ͳ��
Table 3��Parameter statistics of different denoising methods
4 ����
1) ���һ������������ֵ������3D���ҵͼ��ȥ�뷽�����÷������۷��������ȥ�����������һ�£��������ķ����ܺܺõ�ȥ���������������ļ���ͼ��ȥ������
2) ����ȥ�뷽���ܿ˷����з����IJ��㣬�����������ʵʱ���ϵͳҪ�����������Ч�ʣ�ͬʱ���÷����Ը߾��ȡ����ٶȡ���Ҫ��Ļ����Ӿ������ϵͳ�з�����һ���IJο���ֵ��
�ο����ף�
[1] ������, ������, ����. ���ڹ��˼���ĸ߾�����ά�Ӿ���������[J]. �����뼤���, 2018, 47(8): 89-96.
HONG Ziming, AI Qingsong, CHEN Kun. High-precision 3D vision measurement technology based on fiber laser[J]. Infrared and Laser Engineering, 2018, 47(8): 89-96.
[2] XU Jing, GAO Bingtuan, LIU Chuande, et al. An omnidirectional 3D sensor with line laser scanning[J]. Optics and Lasers in Engineering, 2016, 84: 96-104.
[3] ���˻�, ������, �Ÿ���. ���ڼ�����Ĵ�ߴ����Ӧ���о�[J]. �����DZ�ѧ��, 2009, 30(3): 481-485.
QU Xinghua, DAI Jianfang, ZHANG Fumin. Research on large-scale measurement application based on laser ranging[J]. Chinese Journal of Scientific Instrument, 2009, 30(3): 481-485.
[4] ������, �ܼ���, �ɷ���. ���ڷ��������ֵ���������ͼ��ȥ��[J]. �й�ͼ��ͼ��ѧ��, 2014, 19(10): 1418-1429.
YANG Zhuzhong, ZHOU Jiliu, LANG Fangnian. Noise detection and image de-noising based on fractional calculus[J]. Journal of Image and Graphics, 2014, 19(10): 1418-1429.
[5] MAFI M, MARTIN H, CABRERIZO M, et al. A comprehensive survey on impulse and Gaussian denoising filters for digital images[J]. Signal Processing, 2019, 157(4): 236-260.
[6] BARJ E M, AFIFI M, IDRISSI A A, et al. Speckle correlation fringes denoising using stationary wavelet transform:Application in the wavelet phase evaluation technique[J]. Optics & Laser Technology, 2006, 38(7): 506-511.
[7] TALEBI H, MILANFAR P. Global image denoising[J]. IEEE Transactions on Image Processing, 2014, 23(2): 755-768.
[8] AHMED B S, RACHID H, KAMEL E M. et al. Multispectral image denoising with optimized vector non-local mean filter[J]. Digital Signal Processing, 2016, 58(3): 115-126.
[9] GUO Zhichang, SUN Jiebao, ZHANG Dazhi, et al. Adaptive Perona�CMalik model based on the variable exponent for image denoising[J]. IEEE Transactions on Image Processing, 2012, 21(3): 958-967.
[10] KRUPISKI R. Recursive polynomial weighted Median filtering[J]. Signal Processing, 2010, 90(11): 3004-3013.
[11] ����, �����, �ܼ���. һ�ֻ��ڷ������ֵ�����ͼ��ȥ���㷨[J]. �Ĵ���ѧѧ��(���̿�ѧ��), 2011, 43(3): 90-95, 144.
LIU Yan, PU Yifei, ZHOU Jiliu. A digital image denoising method based on fractional calculus[J]. Journal of Sichuan University(Engineering Science Edition), 2011, 43(3): 90-95, 144.
[12] �, лΡ. ��������Ӧ���������ֵ�ͼ��ȥ������ǿ�㷨[J]. ϵͳ��������Ӽ���, 2016, 38(1): 185-192.
LI Bo, XIE Wei. Image enhancement and denoising algorithms based on adaptive fractional differential and integral[J]. Systems Engineering and Electronics, 2016, 38(1): 185-192.
[13] ������, ����, ����. �������Ƿ�����[J]. �����DZ�ѧ��, 2004, 25(Z3): 601-604, 608.
WANG Xiaojia, GAO Jun, WANG Lei. Survey on the laser triangulation[J]. Chinese Journal of Scientific Instrument, 2004, 25(Z3): 601-604, 608.
[14] JIA Tong, SHI Yan, ZHOU Zhongxuan, et al. 3D depth information extraction with omni-directional camera[J]. Information Processing Letters, 2015, 115(2): 285-291.
[15] RANJBARAN A, HASSAN A H A, KHENG E S, et al. An edge detection based noise removal algorithm[J]. Computers & Electrical Engineering, 2014, 40(3): 769-784.
[16] KOUIBIA A, PASADAS M. An approximation problem of noisy data by cubic and bicubic splines[J]. Applied Mathematical Modelling, 2012, 36(9): 4135-4145.
[17] ������, ϯ־��. ��������������ֵ�ĸ߶�̬��Χ����[J]. ��������������ͼ��ѧѧ��, 2015, 27(7): 1278-1289.
ZHAO Lanfei, XI Zhihong. High dynamic range imaging method based on cubic spline interpolation[J]. Journal of Computer-Aided Design & Computer Graphics, 2015, 27(7): 1278-1289.
[18] �º�, ������, ������, ��. �����������������ļ����״����ݿ��ӻ���ֵ��[J]. �����DZ�ѧ��, 2013, 34(4): 831-837.
CHEN Hao, HUA Dengxin, ZHANG Yikun, et al. Lidar data visualization interpolation method based on cubic spline function [J]. Chinese Journal of Scientific Instrument, 2013, 34(4): 831-837.
[19] ����. �ϸ�Խ�ռ�ž���ĵ�����[J]. �人������ѧѧ��, 2008, 30(9): 177-180.
XU Yi. Strictly diagonally dominant matrix of iterative method[J]. Journal of Wuhan University of Technology, 2008, 30(9): 177-180.
[20] ����ɽ, Ҧ˼��, ���, ��. ͼ����������: �ں��Ӿ�������ṹ������ָ��[J]. ��������ҵ��ѧѧ��, 2018, 50(5): 121-128.
ZHU Xinshan, YAO Siru, SUN Biao, et al. Image quality evaluation: fusion of visual characteristics and structural similarity indicators[J]. Journal of Harbin Institute of Technology, 2018, 50(5): 121-128.
(�༭ �²ӻ�)
�ո����ڣ� 2019 -11 -08; �����ڣ� 2020 -01 -27
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61603132) (Project(61603132) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�̷�ģ���ʿ�����ڣ����»����Ӿ���ͼ�����о���E-mail��1549760311@qq.com
ժҪ�����USB-C��Ʒ�ߴ�AOI(automated optical inspection���Զ���ѧ���)��������3D������ϵͳ����ͼ������������ƽ��������ʸߵ����⣬�Ӽ���ԭͼ������̽����ԭ�������������ֵ����ʽ�Ĺ⻬�ԣ��о���������������ֵ������3D����ͼ��ȥ���㷨�����㷨����Ϊ�����ȷ���3D��������ǻ�ȡͼ��Ĺ��̣��ӻ�õ�ͼ���з��벢��ȡ2D��Ϣ��Ȼ��ͼ������������жϿ��������㣬�����ÿһ����λ��Ϊ�����ꡢ����ֵΪ�����꣬��������������ֵ���������������ʵ�����ء��о������������������㷨����������㷨��ȣ��ܹ��ڱ�����Ե���Ժ�������Ϣ��ͬʱ�����õ�ȥ�����������㷨ʵ����ǿ���ܼ������У������߹���Ч�ʡ�
[1] ������, ������, ����. ���ڹ��˼���ĸ߾�����ά�Ӿ���������[J]. �����뼤���, 2018, 47(8): 89-96.
[3] ���˻�, ������, �Ÿ���. ���ڼ�����Ĵ�ߴ����Ӧ���о�[J]. �����DZ�ѧ��, 2009, 30(3): 481-485.
[4] ������, �ܼ���, �ɷ���. ���ڷ��������ֵ���������ͼ��ȥ��[J]. �й�ͼ��ͼ��ѧ��, 2014, 19(10): 1418-1429.
[12] �, лΡ. ��������Ӧ���������ֵ�ͼ��ȥ������ǿ�㷨[J]. ϵͳ��������Ӽ���, 2016, 38(1): 185-192.
[13] ������, ����, ����. �������Ƿ�����[J]. �����DZ�ѧ��, 2004, 25(Z3): 601-604, 608.
[17] ������, ϯ־��. ��������������ֵ�ĸ߶�̬��Χ����[J]. ��������������ͼ��ѧѧ��, 2015, 27(7): 1278-1289.
[19] ����. �ϸ�Խ�ռ�ž���ĵ�����[J]. �人������ѧѧ��, 2008, 30(9): 177-180.
