
һ���Ĵ������˻��Ʋ������Ʒ���
����1������1�����շ�2
(1. �й���ѧԺ ������ѧ���ܻ�е�������о��������� ������130033��
2. ��������ҵ��ѧ �����˼�����ϵͳ�����ص�ʵ���ң������� ��������100081)
ժ Ҫ��
�ڵ������ߵĹ����д��ڻ������Ӷ�����������ȷ���Ĵ������˵�������ģ�͡����ڴˣ����һ���Ĵ����Ʋ������Ʒ������������Ĵ������˽�ģ�����ȶ��Ĵ���������������ö���ѧģ�ͽ��з������ڴ˻����Ͻ���ƽ���˶�ѧ��ģ��Ȼ�����˶�ѧģ��Ϊ�������һ������������ŵ���ȶ��ԵĻ�ģ�۲������ڶԻ��Ʋ����Ĺ��ƣ��������÷�֧���������Ⱥ�Ż��㷨�Ի�ģ�۲�������������Ż���ʹ�ù��ƽ������ȷ������ʵ����֤���˸÷�������Ч�ԣ�Ϊ��һ���Ĺ켣���ƴ��»�����
�ؼ��ʣ�
�Ĵ������������Ʋ�����������ģ�۲�������֧���������Ⱥ�Ż��㷨��
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2013)08-3173-06
Slip estimation method of track robot
ZHU Lei1, GUO Jiang1, LIU Gangfeng2
(1. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China;
2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 100081, China)
Abstract: Due to the slip phenomenon, it is impossible to build the accurate model of track robot. Focusing on this problem, a slip parameters estimation method was provided to improve the track model. First, the track robot and terrain interaction dynamic model was analyzed, and the kinematic mode was also established. Then a Lyapunov stable sliding mode observer for slip parameters was designed based on the kinematic model. Moreover, the gain of the observer was optimized through the non-dominant sort particle swarm optimization (NSPSO) in order to acquire more precise results. Simulation experiment verifies that this method is effective and also prepares for the trajectory control later.
Key words: track robot; slip estimation; sliding mode observer��non-dominant sort particle swarm optimization (NSPSO)
�Ĵ����������ھ������õĵ�����Ӧ�������Ѿ��������Ѿȡ����ַ�������ɿ����������Խ��Խ���Ӧ��[1-2]�������Ĵ������˴��ڻ�����������ģ�͵IJ�ȷ���Ժܴ���ʵ�־�ȷ�켣���ٿ��ƣ�Ϊ�ˣ�����ѧ�߶����Ĵ�������ģ�ͽ����������о���Ŀǰ�����Ĵ������˵��о���Ҫ����2��ģ�ͣ�һ��ģ����ͨ�����Ĵ������˱任Ϊ��ʽ�����ˣ�һ���ǻ��Ʋ��ݸ�ģ��[3]����ģ����Ȼ����Ӧ�ã����Ǻ����˲��ɱ���Ļ���������ʵ��ģ�������Զ�����Ʋ��ݸ�ģ����ͨ�����Ĵ������֮������ã���������ѧƽ�ⷽ����ʵ��������ϽϺ�[4]���������ڻ��Ʋ����Ǹ�ʱ���������˶���ѧƽ�ⷽ���е�δ֪�����������⣬Ϊ��������Ҫ�ܹ���û��Ʋ����ķ�������ͳ�ķ�����������ֱ�Ӳ��������������豸�İ��������������Լ������������ĸ��ŵȣ�������ʵ�֣����ҵõ��IJ���Ҳ��ȷ��[5]��Ϊ��һЩѧ������˼�ӵķ������Ĵ����Ʋ������Ʒ��������磬Dar��[6]��irobot��˾��Packbot������Ϊ������������չ�������˲���(EKF)�Ի����˵Ĺ켣������Ǻͻ��Ʋ����Ƚ����˹��ƣ�����һ���ȱ����ŵ�ģ���н�������֤���ܲ���[7]���û��ڷ�����ɫ�������˲�(SR-UKF)���߷����Թ��Ʒ����Ի����˵�λ�˺ͻ��������������Ϲ��ƣ��ڴ˻����������һ�ֶ�̬�������Ի���ȫ��ָ�������������Խ�������˵Ĺ켣���ٿ������⡣���������������ǻ��ڿ������˲�������˵�ģ�ͷ����Էdz��ߡ��Ǹ�˹�����ر�ǿ��ʱ�����ܼ����½���������ɢ[8]����ģ�۲���(SMO��sliding mode observer)��������ѧ������Ի�ģ��������ȷ���Խ��й۲�ļ����������������нϺõ���������³���ȶ��Ժܸߣ�Ŀǰ�Ѿ��㷺��Ӧ�õ��˶�ϵͳʱ������Ĺ�����[9]��Ϊ�ˣ������������һ�ֻ��ڻ�ģ�۲������Ĵ������˵Ļ��Ʋ������Ʒ��������ǻ�ģ�۲�����������ڲ������Ƶ�Ӱ�죬���ö�Ŀ���������Ⱥ�Ż��㷨����������Ż���������㷨Ч�ʡ�ͨ������ʵ���������÷����ܹ���Ϊȷ�ع��ƻ��Ʋ���������Ӧ�õ��켣�����У�ʵ�ֻ����˾�ȷ���ơ�
1 �Ĵ������˵�������ģ��
�����Ĵ���������õ��о�����Ծ��Ƿ���������̹�˵���ʻ���ܣ���Ȼ������о���ʼ��20����30���������һֱ��20����50��������ű��˵ij���������ѧ�������������������ѹ���������۵õ��˴�ҹ㷺���Ͽɣ�Ϊ�Ĵ������������������о������˻�����
���Le��[10]���ø����۽������Ĵ���������������õ���ѧģ�ͣ���ͼ1��ʾ����ͼ1���Կ������Ĵ���������������õ�ʱ����Ҫ��ͨ�������ִ����Ĵ��Ӷ��Ե���ʩ�����غɣ�������Ҫ������������������������������Ҫ��2���Ĵ���ǣ����Fo��Fi���Լ�2���Ĵ��ܵ���ǰ�����������Rxo��Rxi������������Ҫ�ǻ�����ת��ʱ���������ģ�����������Fcent�Լ��Ĵ�������ܵ��ĺ���Ħ������Ry(��С���Ĵ���λ��������F1��F2�й�)��
���������������������������ã�ʹ��ת���˲�IJ����뵥Ԫ�ļ��������غϣ�һ�㶼λ�ڼ�������O��ǰ��O�䣬�Ӷ����²������ƽǦ������ڻ��ƽǵĴ���������Ĵ����ٶ�Ҳ����ڻ��ơ���ˣ����Ĵ������˵�ģ�ͽ�����ֻ�п��ǻ��Ʋ��ܵõ�ȷ��ģ�͡�
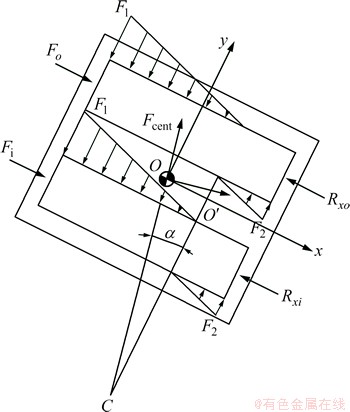
ͼ1 �Ĵ����������������ģ��
Fig. 1 Track-terrain action model
2 �Ĵ�������ƽ���˶�ģ��
���ݻ����˵Ľṹ��ʽ�������˻����˵��˶�ѧģ����ͼ2��ʾ��
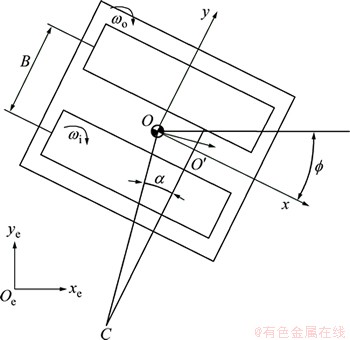
ͼ2 �Ĵ��������˶�ѧģ��
Fig. 2 Track robot kinematics model
������˵�״̬����Ϊ[x y f]���������Ժ����صõ�������������������ϵxoy����������˶�ѧ����Ϊ
 (1)
(1)
ʽ�У���oΪ�Ĵ�ת��ʱ����Ĵ���ת�����ٶȣ�rΪ�Ĵ������ְ뾶����iΪ�Ĵ�ת��ʱ�ڲ��Ĵ���ת�����ٶȣ�ioΪ�Ĵ�ת��ʱ����Ĵ��Ļ����ʣ�iiΪ�Ĵ�ת��ʱ�ڲ��Ĵ��Ļ����ʣ�BΪ�Ĵ�����֮��ľ��롣
��ʽ(1)ת��Ϊ����ȫ������XeOeYe�п��Եõ�


 (2)
(2)
3 ��ģ�۲������
ͨ�������о����Կ���������Ĺؼ��������ͨ�����������ĵ��ٶȡ��Ĵ��ֵ�ת�����ٶ��Լ��������IJ��������������Ӧ�Ļ��Ʋ������Ӷ����ڻ����˵Ŀ��ơ������Ի�ģ�۲����ܹ�ȷ�ض�ϵͳ�IJ�ȷ���Խ��й��ƣ���˿���ͨ������ʵ�ֶԻ��Ʋ����Ĺ۲⣬ʹ�ù켣�滮ģ���ӽӽ���ʵ��������ڿ���ͨ�������˵�X��λ�Ƶõ�Y��λ�����ֻ���X��λ�ƽ��й۲⼴�ɣ����ҿ���ͨ��������Ĵ��Ļ����ʷֱ���㻬�ƽǣ�����������ʽ(4)��ʾ�Ļ�ģ�۲���


 (3)
(3)
ʽ�У�KiΪ��ģ����ϵ������Ϊ����0��������
�������Խ�������ַ���Ϊ��


 (4)
(4)
���������ѡ������ϵ���Ϳ���ʹ����������������ʱ����������0���������Եõ��������Ļ��Ʋ������Ʒ���Ϊ��

 (5)
(5)
ʽ�У�[]LP��ʾ��ͨ�˲�����
��ģ�۲������ȶ��Կ���ͨ��������ŵ�̽���֤����Ϊ�˽���������ŵ��Ϊ ���ֱ��V1��V2��V3���з�����
���ֱ��V1��V2��V3���з�����
����V1��

 (6)
(6)
�� ����
���� ����
���� ������V1�ǽ����ȶ��ġ�
������V1�ǽ����ȶ��ġ�
����V2��

 (7)
(7)
�� ����
���� ����
���� ������V2���ǽ����ȶ��ġ�
������V2���ǽ����ȶ��ġ�
����V3��

 (8)
(8)
�� ����
���� ����
���� ��V3���ǽ����ȶ��ġ����ϣ�����ѡ��K1��K3��K5����ʹ����ƵĻ�ģ�۲����ǽ����ȶ��ģ�ʵ�ֶ��ڻ����˵Ĺ켣���ơ�
��V3���ǽ����ȶ��ġ����ϣ�����ѡ��K1��K3��K5����ʹ����ƵĻ�ģ�۲����ǽ����ȶ��ģ�ʵ�ֶ��ڻ����˵Ĺ켣���ơ�
4 ���ڶ�Ŀ���Ż������Ļ�ģ�۲��������Ż�
��������Ĵ�С�����������ٶ��кܴ��ϵ�����һ���Ӱ�������ľ��ȡ���ˣ�һ����������������ѡ�����������ʹ���ܿ��������������ϣ�Ȼ�����С����������������Ķ���ʹ�����ƫ�뻬���档��ˣ���������һ���Ż��㷨���������ʱʱ�������Ӷ���������ٶȣ������Ᵽ�ֽ�Сϵͳ�����ƽ������֮���ì��[11]��
����ÿһ����ʱ�̵��������ʽ��ʾ��

i=1��2������n (9)
����������ÿһʱ�̵������Ϊ�Ż�����������ÿһʱ�̵������С���ɡ���������ʱ������ƣ�Ŀ�꺯����e(Ti)�ĸ���Ҳ���ڲ������ӡ�Ϊ�ˣ���ͳ�Ļ��ڵ�Ŀ��ĸ����Ż��㷨�Ѿ�������Ҫ����Ҫһ�ֻ��ڶ�Ŀ����Ż���������Ϊ����Ŀ��֮����ڵ�Լ����������ã���Ŀ���Ż������Ľⲻ��Ŀ���Ż�����һ�����Ž⣬����һ������Pareto���ŵ�һ���[12]��������Ŀ����Ż��㷨���Ƕ���Ⱥ�е����ӽ���Pareto���ŵ���⼴�ɣ�Ҳ�����������ֶ��ڶ�Ŀ���Ż����Ŵ��㷨�������Ŀ���Ŵ��㷨(MOGA)[13]����֧������Ŵ��㷨(NSGA)[14]�����ٷ�֧������Ŵ��㷨(NSGA-II)[15]��С����Pareto�Ŵ��㷨(NPGA)��[15]����������ѧ�������һ�ֻ��ڷ�֧���������Ⱥ��Ŀ���Ż�����(NSPSO)���÷����Ի�����PSO���������˸Ľ����Ӷ������ӵ���������ֵ�ͺ�������˸�Ϊ���������ã��Ӷ�ʹ�÷�֧�����ıȽϸ�����Ч�������Ч��[16]���ʱ��ľͿ��Բ��û��ڷ�֧���������Ⱥ�Ż��㷨���������������⣬������߶��ڻ��ƹ��Ƶ���ȷ�ԡ�����Pareto���Ž⼯���ڷ�֧�伯�в����ģ�Ϊ�ˣ�����Ҫ����һЩ���ڷ�֧�伯����ػ�������[17]��
����1 ��PΪһ�����ϣ�������n�����壬��������ÿһ���������m�����ԣ���ÿһ�����Զ�����һ�����ܺ���fk()(k=1��2������m)���������Զ�P�и��尴�Ƿ����֧���ϵ���з��ࣺ
Pareto֧���ϵ�� ����
���� ��
�� ����
���� ��ʹ��
��ʹ��
 �����x֧��y����ʾΪ
�����x֧��y����ʾΪ ������
������ ��ʾ���߾���֧���ϵ(Ҳ�ɳ�Ϊy��x֧���)��
��ʾ���߾���֧���ϵ(Ҳ�ɳ�Ϊy��x֧���)��
����ع�ϵ����������ʹ�� ����x��y֮���û��֧���ϵ�����x��y����������
����x��y֮���û��֧���ϵ�����x��y����������
����2  ����
���� ��ʹ��
��ʹ�� �����xΪ����P��һ����֧����塣�ɼ���P�е�ȫ����֧�������ɵļ��ϣ���֮ΪP�ķ�֧�伯��
�����xΪ����P��һ����֧����塣�ɼ���P�е�ȫ����֧�������ɵļ��ϣ���֮ΪP�ķ�֧�伯��
����3 ��Nds��P�ķ�֧�伯������x��P�ķ�֧����壬���� �����Nds��P������֧�伯��
�����Nds��P������֧�伯��
�����Ϳ������ݷ�֧�伯�ĸ����Ⱥ�еĸ�����з��࣬Ȼ��ͨ������Ⱥ���㷨�Է�֧�伯����Ѱ�ţ��Ӷ�ʵ�ֶ����Ų�������⡣
����Ⱥ�㷨��1995����Kennedy��Eberhart[18]����ģ�ͨ��ģ���������������ʳ�Ĺ�����ʵ�ֵ�һ���Ż��㷨����Ⱥ�������Ϊ����ʹ����Ⱥ�������ܹ������ŵ����ӵķ����ƶ���������Ⱥ�еĵ�i�����ӣ����������˶��е���������������λ��ΪPi������������Ⱥ������˶�λ��ΪPg�������ÿһ�����ӿ���ͨ�����¹�ʽ�����ٶ���λ�õĸ��£�

 (10)
(10)
ʽ�У�c1��c2Ϊѧϰ���ӣ�r1��r2Ϊ0��1֮����������wΪȨ�����ӡ�
��λ������ ����Ⱥ����ΪN����Ⱥ�洢�б�ΪPSOlist���������ڷ�֧����������Ⱥ�㷨�������Ż��㷨�ľ��岽�����£�
����Ⱥ����ΪN����Ⱥ�洢�б�ΪPSOlist���������ڷ�֧����������Ⱥ�㷨�������Ż��㷨�ľ��岽�����£�
Step 1����ʼ�����ڱ�����Χ����������ɵ�i�����ӵĵ�ǰλ��Xi���䵱ǰ���ٶ�Vi�����ұ�֤Vi�������ٶȱ����ļ�ֵVmax���������ڲ�ͬ����ĸ���Ϊ0.5�����������λ��PiΪXi�����ҽ���洢��PSOlist�С������������t=0��
Step 2���Լ��������м�1������t=t+1��
Step 3������֧���ϵ�����ݶ���1��2��3����Ӧ�Ⱥ���(10)��ȷ����Ⱥ�еķ�֧��������֧�����ӣ�������ֱ𱣴��ڷ�֧����༯��A�к�֧�伯��B�У�
Step 4������ÿһ�����Ӽ�����С����ֵ����ӵ������ֵ��
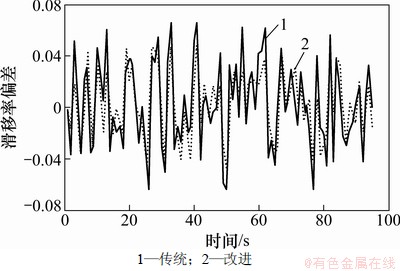
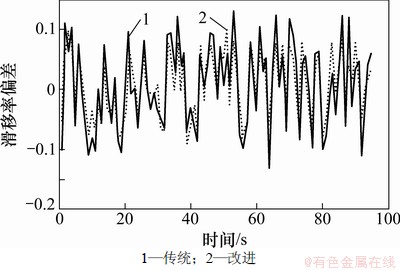
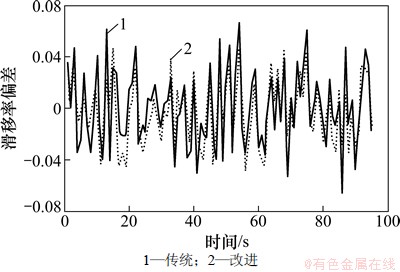
Step 5������С��������ӵ������ֵ�Է�֧����༯�е����ӽ��е�����
Step 6��������Ⱥ�е�����i���Ӽ���A�Ľ��Ÿ�����(������Ӧ����ߵ�ǰ5%����)���ѡ��һ��ȫ������Pg�����ڷ���(10)�������ӵ����ٶ�Vi��Ȼ�����Xi������i�����ӵ�Pi���µ�Xi���浽һ����ʱ����Ⱥ�У������ڼ���C�У�����Pi��Xi�ǹ���ģ������Ⱥ����Ϊ2N����i Step 7���Ӽ���C��ȷ����Щ�ܹ���Ϊ��֧�������ӣ�������Щ�洢����֧����༯A�С��ڼ���C�г��˷�֧���������������Ӷ����洢������Crest�У� Step 8�����PSOlist���Ա�������һ�ε����� Step 9�������ѡ���֧����༯�е����Ӳ������Ƿ���PSOlist�У� Step 10����PSOlist�е����Ӹ���С��N (a) �Լ���B�е������ٽ���֧����㣬�����ݷ����ϵ�ֱ�����ڼ���A�뼯��B�С� (b) ��A�����Ӽ���PSOlist�У���PSOlist�ĸ�����Ȼ����N��ת��(a)�� Step 11����tС����������������ת��Step 2�� Step 12�������յ���Ⱥ�еõ����Ž⣬������ϵ���� ����ͨ�������ķ�������ʵʱ�ض�����ϵ�����е������Ӷ�ʹ�ù۲����Ĺ������Խ��ԽС�� 5 ����ʵ�� Ϊ��֤�����Ŀ���������Ч�ԣ���Matlab�н��з���ʵ�顣�ڷ���ʵ���У�������������0.2 m/s���ٶ�ֱ������һ�Σ�Ȼ���Ժ㶨�Ľ��ٶȦ�=2 (��)/s�ư뾶Ϊ1 m�İ�Բ�켣���ߣ�������·����ͼ3��ʾ���ֱ���ñ��ĵĸĽ�SMO�봫ͳSMO�Ի����˵������Ĵ��������Լ����ƽǽ����˹��ƣ�2�ַ��������ȽϽ����ͼ4~6��ʾ������2�ַ�����Ӧ��ƽ�����������ʱ������˱Ƚϣ����1��ʾ����ͼ4~6�ͱ�1���Կ��������ñ�������Ļ���NPPSO�Ľ���SMO�������ƵĻ��Ʋ�������ʵֵ���ӽӽ�������ʱ������������Ȼ��������˵�ʹ��Ҫ�������ڹ켣���٣��Ӷ�Ϊ�����˵Ŀ����ṩ������ ͼ3 ����������·�� Fig. 3 Trajectory of track robot ͼ4 ���Ĵ������ʹ������Ƚ� Fig. 4 Comparisons of left slip estimation errors between traditional and modified method ͼ5 ���Ĵ������ʹ������Ƚ� Fig. 5 Comparisons of right slip estimation errors between traditional and modified method ͼ6 ���ƽǹ������Ƚ� Fig. 6 Comparisons of slip angle estimation error between traditional and modified method ��1 2�ֹ��Ʒ������ܱȽ� Table 1 Performance comparisons between traditional and modified method 6 ���� (1) �����Ĵ�������ƽ���˶�ѧģ�ͣ������һ�ֻ�ģ�۲��������Ĵ������˻��Ʋ����Ĺ��ƣ���֤������³���ȶ��ԡ� (2) ���÷�֧���������Ⱥ�Ż��㷨�Ի�ģ�۲�����������Ż���������㷨Ч�ʡ� (3) ͨ��Matlab�Աȷ���ʵ�飬֤���˸Ľ������Ĺ������Ҫ���ڴ�ͳ�����Ĺ������������������˼�����������ʱ���������ӣ�������Ȼ����ʹ��Ҫ�� �ο����ף� [1] ����ƽ, �ܹ��. ��Ĵ���������ʵʱ�����ͱ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2007, 38(1): 128-132. WANG Suiping, XIONG Guanghui. Real-time navigation and obstacle avoidance for deep seabed tracked vehicle[J]. Journal of Central South University: Science and Technology, 2007, 38(1): 128-132. [2] ����, ����׳, �Խ�, ��. ����դ�Ŀ�������������ȫ��·���滮��ֲ�����[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(11): 3421-3428. ZHU Lei, FAN Jizhuang, ZHAO Jie, et al. Global path planning and local obstacle avoidance of searching robot in mine disasters based on the grid method[J]. Journal of Central South University: Science and Technology, 2011, 42(11): 3421-3428. [3] ����, ����, �¿�. �Ĵ�ʽ�ƶ������˶���ѧģ�ͼ��䷴������[J]. �廪��ѧѧ��: ��Ȼ��ѧ��, 2006, 46(8): 1377-1380. LI Yan, YANG Xiangdong, CHEN Ken. Dynamics model and feedback control of tracked robots[J]. Journal of Tsinghua University: Science & Technology, 2006, 46(8): 1377-1380. [4] Wong J Y, Chiang C F. A general theory for skid steering of tracked vehicles on firm ground[C]//Garden C. Proceeding of the Institution of Mechanical Engineers, 2001: 343-355. [5] ������, ���շ�, ��־Զ. �����ٶȹ۲������ƶ������˹켣���ٿ���[J]. ���ݹ���ѧԺѧ��: ��Ȼ��ѧ��, 2010, 25(3): 13-18. GENG Junxiao, XING Linfen, ZHANG Zhiyuan. Research on trajectory tracking control of mobile robots based on velocity observer[J]. Journal of Xuzhou Institute of Technology: Natural and Science Edition, 2010, 25(3): 13-18. [6] Dar T M, Longoria R G. Slip estimation for small-scale robotic tracked vehicles[C]//2010 American Control Conference Marriott Waterfront. Baltimore: IEEE, 2010: 6816-6821. [7] �ܲ�, ������, ������. Ұ������˻���ЧӦ�����߽�ģ�Ϳ���[J]. ������, 2011, 33(3): 265-272. ZHOU Bo, DAI Xianzhong, HAN Jianda. Online modeling and tracking control of mobile robots with slippage in outdoor environments[J]. Robot, 2011, 33(3): 265-272. [8] ����, ����׳, �Խ�, ��. һ��δ֪�����µ��ƶ�������SLAM����[J]. ���пƼ���ѧѧ��: ��Ȼ��ѧ��, 2011, 39(7): 9-13. ZHU Lei, FAN Jizhuang, ZHAO Jie. SLAM method for mobile robot in unknown environment[J]. Journal of Huazhong University of Science and Technology: Nature Science Edition, 2011, 39(7): 9-13. [9] ������, �︻��. ��ģ��ṹ�������ۼ����㷨�о����չ[J]. ����������Ӧ��, 2007, 24(3): 407-418. LIU Jinkun, SUN Fuchun. Research and development on theory and algorithms of sliding mode control[J]. Control Theory & Applications, 2007, 24(3): 407-418. [10] Le A T, Rye D C, Durrant-Whyte H F. Estimation of back-soil interactions for autonomous tracked vehicles[C]//Harrigan R. Proceedings of the 1997 IEEE International Conference on Robotics and Automation Albuquerque. New Mexico: IEEE, 1997, 2: 1388-1393. [11] ����, �ĵ�, �ް�, ��. ���ڶ�Ŀ���Ż���ģ����ģ��ṹ���Ƽ�Ӧ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(6): 1149-1154. YANG Yong, WEN Dan, LUO An, et al. Fuzzy sliding mode variable structure control based on multi-objective optimization and its application[J]. Journal of Central South University: Science and Technology, 2006, 37(6): 1149-1154. [12] ����, ��ΰ־, ��Ӧ��. ����Ŀ���Ż����������Ӧ����Ⱥ�㷨[J]. �����������Ӧ��, 2010, 46(23): 38-40. WEN Ying, LIAO Weizhi, BI Yingzhou. Self-adaptive particle swarm optimizer for multi-objective optimization problems[J]. Computer Engineering and Applications, 2010, 46(23): 38-40. [13] Skinner B A, Parks G T, Palmer P R. Comparison of submarine drive topologies using multiobjective genetic algorithms[J]. IEEE Transactions on Vehicular Technology, 2009, 58(1): 57-68 [14] ��ʤ��, ������, ½��. ���ڸĽ���NSGA �Ŵ��㷨��SOC ��Ӳ�����ַ���[J]. ����ѧ��, 2009, 37(11): 2595-2599. LUO Shengqin, MA Xiaoxiao, LU Yi. An advanced non-dominated sorting genetic algorithm based SOC hardware/software partitioning[J]. Acta Electronica Sinica, 2009, 37(11): 2595-2599. [15] Heris S M K, Khaloozadeh H. Open- and closed-loop multiobjective optimal strategies for HIV therapy using NSGA-II[J]. IEEE Transactions on Biomedical Engineering, 2011, 58(6): 1678-1685. [16] Li X D. A non-dominated sorting particle swarm optimizer for multiobjective optimization[C]//Erick C. Genetic and Evolutionary Computation Conference 2003. Chicago: Springer, 2003: 37-48. [17] Coello C A C. A comprehensive survey of evolutionary-based multi-objective optimization techniques[J]. Knowledge and Information System, 1999, 1(3): 269-308. [18] Kennedy J, Eberhart R C. Particle swarm optimization[C]// Attikouzel Y. Proceeding of IEEE International Conference on Neural Networks. Perth: IEEE, 1995: 1942-1948. (�༭ �°���) �ո����ڣ�2012-09-20�������ڣ�2012-12-06 ������Ŀ�����Ҹ����о���չ�ƻ�(��863���ƻ�)��Ŀ(2007AA041501) ͨ�����ߣ�����(1982-)���У��������������ˣ���ʿ�����»���ϵͳ�����㷨�о����绰��15948786713��E-mail��rayjew@sohu.com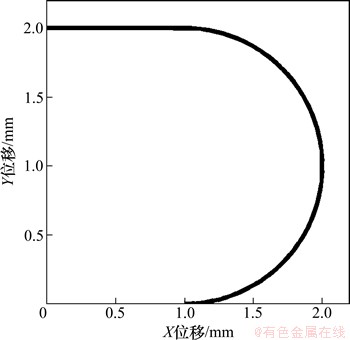

ժҪ�������Ĵ��������ڵ������ߵĹ����д��ڻ������Ӷ�����������ȷ���Ĵ������˵�������ģ�͡����ڴˣ����һ���Ĵ����Ʋ������Ʒ������������Ĵ������˽�ģ�����ȶ��Ĵ���������������ö���ѧģ�ͽ��з������ڴ˻����Ͻ���ƽ���˶�ѧ��ģ��Ȼ�����˶�ѧģ��Ϊ�������һ������������ŵ���ȶ��ԵĻ�ģ�۲������ڶԻ��Ʋ����Ĺ��ƣ��������÷�֧���������Ⱥ�Ż��㷨�Ի�ģ�۲�������������Ż���ʹ�ù��ƽ������ȷ������ʵ����֤���˸÷�������Ч�ԣ�Ϊ��һ���Ĺ켣���ƴ��»�����
[1] ����ƽ, �ܹ��. ��Ĵ���������ʵʱ�����ͱ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2007, 38(1): 128-132.
[3] ����, ����, �¿�. �Ĵ�ʽ�ƶ������˶���ѧģ�ͼ��䷴������[J]. �廪��ѧѧ��: ��Ȼ��ѧ��, 2006, 46(8): 1377-1380.
[7] �ܲ�, ������, ������. Ұ������˻���ЧӦ�����߽�ģ�Ϳ���[J]. ������, 2011, 33(3): 265-272.
[9] ������, �︻��. ��ģ��ṹ�������ۼ����㷨�о����չ[J]. ����������Ӧ��, 2007, 24(3): 407-418.
[12] ����, ��ΰ־, ��Ӧ��. ����Ŀ���Ż����������Ӧ����Ⱥ�㷨[J]. �����������Ӧ��, 2010, 46(23): 38-40.
[14] ��ʤ��, ������, ½��. ���ڸĽ���NSGA �Ŵ��㷨��SOC ��Ӳ�����ַ���[J]. ����ѧ��, 2009, 37(11): 2595-2599.
