

J. Cent. South Univ. (2019) 26: 2854-2869
DOI: https://doi.org/10.1007/s11771-019-4219-z

Assessing performance of collision mitigation brake system in Chinese traffic environment
ZHAO Zhi-guo(��־��)1, ZHENG Xun-jia(֣Ѷ��)2, WANG Jian-qiang(����ǿ)2,XU Qing(����)2, KODAKA Kenji3
1. Jiangsu Key Laboratory of Traffic and Transportation Security, Huaiyin Institute of Technology,Huaian 223001, China;
2. State Key Laboratory of Automotive Safety and Energy, Tsinghua University, Beijing 100084, China;
3. Honda R & D Co. Ltd. Automobile R & D Center, Tochigi 321-3393, Japan
 Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2019
Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2019
Abstract:
Advanced driver-assistance systems such as Honda��s collision mitigation brake system (CMBS) can help achieve traffic safety. In this paper, the naturalistic driving study and a series of simulations are combined to better evaluate the performance of the CMBS in the Chinese traffic environment. First, because safety-critical situations can be diverse especially in the Chinese environment, the Chinese traffic-accident characteristics are analyzed according to accident statistics over the past 17 years. Next, 10 Chinese traffic-accident scenarios accounting for more than 80% of traffic accidents are selected. For each typical scenario, 353 representative cases are collected from the traffic-management department of Beijing. These real-world accident cases are then reconstructed by the traffic-accident-reconstruction software PC-Crash on the basis of accident-scene diagrams. This study also proposes a systematic analytical process for estimating the effectiveness of the technology using the co-simulation platform of PC-Crash and rateEFFECT, in which 176 simulations are analyzed in detail to assess the accident-avoidance performance of the CMBS. The overall collision-avoidance effectiveness reaches 82.4%, showing that the proposed approach is efficient for avoiding collisions, thereby enhancing traffic safety and improving traffic management.
Key words:
Cite this article as:
ZHAO Zhi-guo, ZHENG Xun-jia, WANG Jian-qiang, XU Qing, KODAKA Kenji. Assessing performance of collision mitigation brake system in Chinese traffic environment [J]. Journal of Central South University, 2019, 26(10): 2854-2869.
DOI:https://dx.doi.org/https://doi.org/10.1007/s11771-019-4219-z1 Introduction
In 2016, nearly 190000 crashes were reported to the police in China, involving more than 63000 fatalities and 226000 injuries [1]. Traffic accidents are major public-safety problems in developing countries such as China, and they also cause enormous economic losses and can even destroy families. Some research has shown that crash severity is reduced by lowering the speed of the striking vehicle if complete prevention is not possible [2]. Therefore, various advanced driver- assistance systems (ADASs) have been proposed to mitigate severe traffic situations, in particular autonomous emergency braking systems (AEBSs).
To make traffic environments safer, Europe [3, 4], USA [5, 6], Japan [7], Australia [7], and China [8] have separately promulgated policies to promote the application of AEBSs. At the same time, AEBSs are being researched and developed globally, and companies are rolling out their own versions. Examples include the PRE-SAFE system (Mercedes-Benz), the pre-Crash system (Volkswagen), forward emergency braking (Nissan), the pre-collision system (Toyota), city safety (Volvo), and the collision mitigation brake system (CMBS; Honda).
The development and the implementation of AEBSs are ongoing, with the basic technologies dealing mainly with object detection and decision making. Usually, objects are detected by millimeter- wave radar, cameras, or both [9-14]. Accurate evaluation of the causal factors of crashes can provide fundamental information for effective transportation policies, vehicle design, and driver education. Thus, as detection devices for AEBSs, these technologies have different advantages and disadvantages. An AEBS equipped with millimeter- wave radar can detect a vehicle in front of it under different weather conditions, including rain and fog. Such systems also show excellent performance when there is insufficient light, such as in tunnels and at night. However, millimeter-wave radar cannot recognize pedestrians because it works by emitting millimeter waves and receiving reflected waves to recognize facing objects, and unfortunately pedestrians have low reflectance. By contrast, the performance of a camera is subject to weather conditions and light conditions, but it can easily recognize pedestrians.
In recent studies, decision-making variables such as time to collision [15-17], inverse time to collision [18, 19], time headway [20, 21], and threshold distance [22] have been used widely as parameters for AEBS development. To evaluate their effectiveness, studies have been undertaken globally on the performance and utility of AEBSs using specific traffic-accident cases, deep statistics, and field tests. MOORE and ZUBY [23] provided a regression-analysis model to quantify the effectiveness of AEBSs on accident rates; the comprehensive dataset used was provided by automobile insurance companies, and they found that AEBSs reduced the accident rates by 10%- 14%. FILDES et al [24] used an induced-exposure approach and found that a low-speed AEBS reduced police-reported rear-end striking-injury crash rates by 35%-41%.
Agencies responsible for evaluating vehicle performance (e.g., E-NCAP [3], NHTSA [5], MLIT, A-NCAP [7], C-NCAP [8]) often use real-life driving data obtained from field tests to evaluate AEBS performance. However, such field tests are usually expensive and time-consuming. To solve these problems, simulation software such as PC-Crash is widely used for AEBS development. Actual traffic accidents can be reconstructed to simulate the entire process of the accident, including pre-collision, collision, and post-collision dynamics. Thus, the effectiveness of an AEBS can be assessed preliminarily by simulation. Herein, the simulation part of the study is based on this accident-reconstruction software PC-Crash.
Recently, China overtook USA to become the largest automobile market in the world [25]. Moreover, the automobile production of both Chinese-made and joint-venture vehicles has been increasing yearly. In 2016, Honda China sales accounted for about 1.26 million vehicles, allowing it to overtake Toyota��s second-place ranking among Japanese automobile companies [26]. To reduce traffic accidents and fatalities, Honda has developed various active-safety technologies, including its CMBS, which is a type of AEBS. This active-safety system is now standard on Honda��s high-end models, including the Accord, CIVIC, and CR-V, and it has shown excellent traffic-accident- avoidance performance in USA, Japan, and Europe [27-29]. However, research is lacking regarding the effectiveness of the CMBS for Chinese traffic. Given that China is one of Honda��s largest overseas markets, it is important to analyze the adaptation of the CMBS to the Chinese traffic environment by evaluating its performance according to Chinese macroscopic and microscopic traffic-accident data.
To that end, we begin by analyzing the characteristics of Chinese traffic accidents according to data from Chinese annual reports on traffic-accident statistics. We then selected and investigated 353 representative actual traffic- accident cases from the traffic-accident database managed by the traffic-control department in Beijing. Finally, by using the co-simulation platform of PC-Crash and rateEFFECT, we assessed the performance of the CMBS in different simulation scenarios. Not only can the present research help improve the CMBS, it can also help develop other active-safety technologies. Furthermore, we address how to improve the accident-mitigation performance of the CMBS, especially for the Chinese environment.
The rest of this paper is arranged as follows. In Section 2, we describe briefly the traffic-accident characteristics in China according to traffic- accident statistics for the past 16 years. In Section 3, we collect and reconstruct 353 typical cases according to Chinese traffic characteristics. In Section 4, we analyze and reconstruct each typical traffic-accident case by statistical methods and accident-reconstruction software, respectively, and we assess in detail the effectiveness of the CMBS in avoiding traffic accidents. In Section 5, we present an improved CMBS algorithm, and the simulation results show that it is better in avoiding collisions. We present our discussion in Section 6 and our conclusions in Section 7.
2 Traffic-accident characteristics in China
On the basis of the accident-statistics data [1], we found that although the total number of accidents is decreasing yearly, it remains high and the traffic traits are complex. Thus, we conclude that although the traffic conditions in China have improved to a certain extent, the specific circumstances must be analyzed for better safety.
2.1 Analysis of motor vehicles
The total number of traffic accidents in China has decreased remarkably, as illustrated in Figure 1. Most traffic accidents are still caused by passenger cars, trucks, and motorcycles. Moreover, the total number of casualties among those not driving vehicles has been decreasing. Although the number of traffic accidents is declining, the proportion of traffic-accident casualties due to passenger cars is still increasing gradually yearly, whereas the data for other vehicles remain stable, as illustrated in Figure 1. This phenomenon indicates that effective methods for traffic-accident prevention and control should naturally start by improving the active- safety technologies in passenger cars.
2.2 Analysis of nonmotor vehicles
Figure 2 shows that the total number of nonmotor-vehicle casualties is decreasing yearly. In 2002, there were 202672 non-motor vehicle casualties in China, and this number declined to 114866 in 2016. Pedestrians and cyclists account for the majority of traffic-accident casualties. From 1999 to 2016, pedestrians ranked first in the total number of traffic-accident casualties, followed by bicycles, electric bicycles, and tricycles. However, the proportion of traffic-accident casualties is stable, and the number of cyclist casualties has decreased yearly. Moreover, the proportion of traffic-accident casualties related to electric bicycles has increased rapidly over the years.
3 Methods
3.1 Reconstruction and analysis of actual traffic accidents
The accident-avoidance effectiveness of the CMBS can be analyzed by co-simulation with PC-Crash and rateEFFECT. First, the motion response and the entire process of each accident case are rebuilt by PC-Crash. The collision scenarios, velocities, and braking decelerations are obtained from actual accident data. Then, the rateEFFECT/Module Generator function is used to create CMBS modules and the collision-mitigation algorithm for which is written in C++. Finally, a CMBS model is built on the co-simulation analysis platform of PC-Crash and rateEFFECT. With rateEFFECT, the CMBS model can be integrated into the target vehicles. Furthermore, two types of analytical results are obtained by turning the CMBS model on and off. Comparing these two types of results in rateEFFECT, the accident-avoidance performance of the CMBS is assessed. The underlying architecture of the CMBS is illustrated in Figure 3.
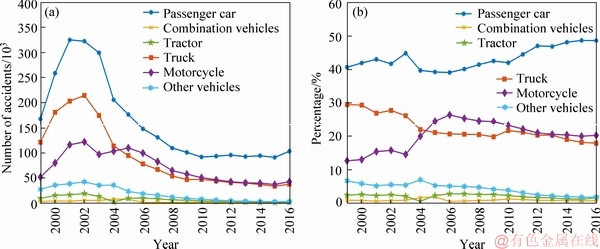
Figure 1 Numbers (a) and proportions (b) of traffic accidents for different types of vehicles
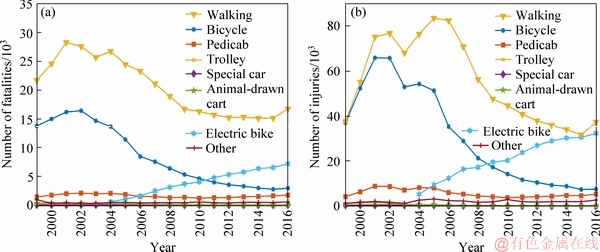
Figure 2 Numbers of fatalities (a) and injuries (b) for different non-motor vehicles
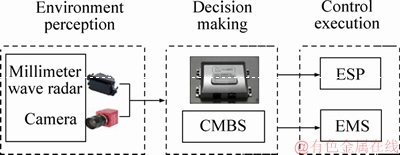
Figure 3 Architecture of collision mitigation brake system
3.1.1 Assumptions
According to the underlying architecture of the CMBS, the first step is environment perception, and in general the performances of AEBSs tend to differ widely because different detection sensors are used in actual traffic environments. AEBS products on the automobile market can be categorized as those that use millimeter-wave radar and those that use cameras. There are identifiable differences in the strengths and weaknesses of millimeter-wave radar and cameras. We make the following three assumptions on the co-simulation platform.
1) Facing obstacles, including vehicles, bicycles, and pedestrians, are detected immediately by the detection sensors on the subject vehicle.
2) The decision-making and vehicle-control modules of the CMBS react promptly once the detection information is received.
3) The visibility of the traffic environment does not affect the accident-avoidance performance of the CMBS.
3.1.2 Scenario selection and description
The 353 accident cases in the database of actual accidents can be classified according to morphology, as shown in Figure 4(a). 49 cases are related to pedestrians, 114 to two-wheeled vehicles, 100 to rear-end accidents, 56 to collision accidents, and 34 to scrape accidents. It is shown in Figure 4(b) that the classification according to the regions in which these accidents took place. The collision probability is higher in large areas between the city and the countryside such as in Shunyi, Haidian, and Fengtai. This is probably related to the area of the region, the number of vehicles, the number of connections between highways and city roads, and the speed difference between collision vehicles.
Furthermore, the above five types of accident are separated into 10 typical scenarios for deeper simulation and analysis. Among them, the cyclist types are split into two scenarios on the basis of the movement direction of the subject vehicle (scenarios 1 and 9); the rear-end accidents are divided into three scenarios according to the velocity of the front vehicle (scenarios 3�C5); the side-collision accidents are classified into accidents caused by lane change and accidents caused by lane departure (scenarios 8 and 10); and the scrape accidents are classified according to whether or not there are traffic lights at an intersection (scenarios 6 and 7). A brief description of each scenario is presented in Table 1.
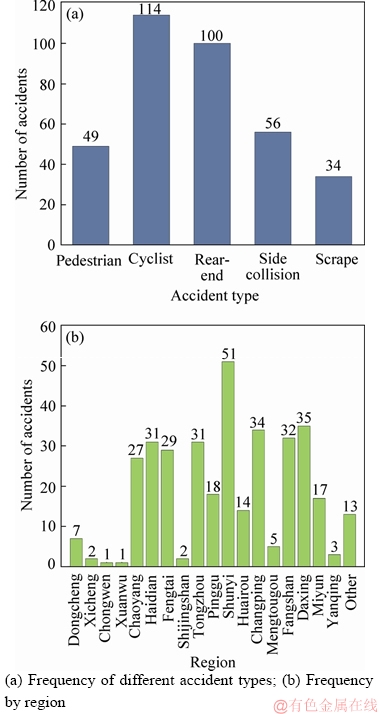
Figure 4 Classification of traffic accidents:
3.1.3 Reconstruction of traffic accidents
The road conditions in an accident-scene diagram include the specific size of the road, the final positions of all the participants, the specific positions of objects scattered on the road, the positions of collision points, and the marks on the road. These data are the foundations of accident reconstruction. The simulation flowchart is shown in Figure 5. Information concerning the vehicle,road, and accident is fed into the co-simulation platform before the simulation starts. An existing vehicle model is then selected from the PC-Crash database according to brand and model. For better reconstruction, hand-drawn sketches provided by the police must be drawn with CAD in a 1:1 proportion, whereupon the CAD drawings must be imported into PC-Crash to reconstruct the model of the accident scene, as shown in Figure 6, which presents the entire collision process. Besides this, other actual accident conditions must be considered as well, such as the road and weather conditions to set the friction coefficient, as shown in Figure 4. To ensure that the accident scene on the screen approximates the actual one, several tests and adjustments are made. On the basis of this, the reconstruction model is determined.
Table 1 Scenario details

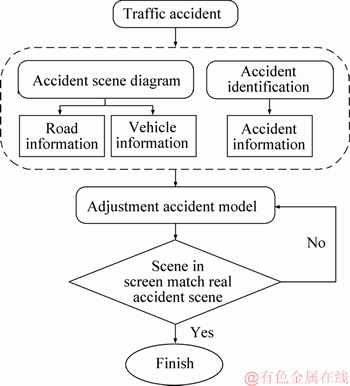
Figure 5 Accident-reconstruction flow
3.1.4 Judgment criteria for collision risk
The collision risk for each traffic accident should be defined before the simulation. The collision-avoidance performance of the CMBS differs in each scenario and even in each case. Therefore, a benchmark is needed for judging the risk. Herein, the rateEFFECT simulation model has four injury severity score (ISS) risk functions, as shown in Figure 7. The horizontal axis represents the collision velocity of the subject vehicle, and the vertical axis represents the collision risk. The parameter x is the level of human injury: the larger the value of x, the more serious of the injury. The curves reflect the relationship between the collision velocity and the collision risk for x values greater than 1, 2.5, 5 or 10, respectively. Generally, human injuries are already serious to a certain degree when x exceeds 2.5. Therefore, we use the ISS risk function for x>2.5 as the reference for human injury. Under this assumption, we use the CMBS algorithm to analyze the 353 actual traffic accidents belonging to scenarios 1-10 separately and integrally. A more detailed description of the results is given in the next section.
3.2 Accident-mitigation performance of CMBS
The core of the CMBS is its situation assessment: the system should estimate the collision risk accurately. Risk metrics differ between dangerous and safe according to vehicle braking inputs and range behavior. Therefore, we use an algorithm that has been demonstrated to be accurate through the use of naturalistic driving data. The process used in the present study to assess the benefits of the CMBS is described in Figure 8.
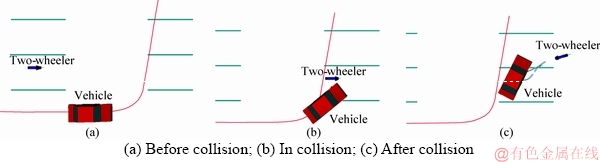
Figure 6 Accident reconstruction in simulation platform:
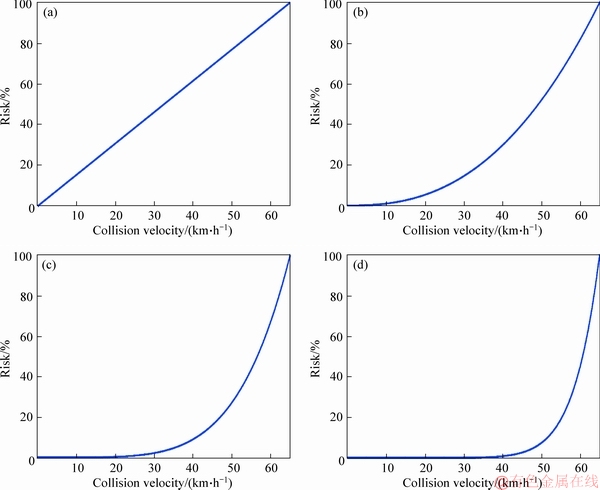
Figure 7 Injury severity score risk functions for x>1 (a), x>2.5 (b), x>5 (c) and x>10 (d)
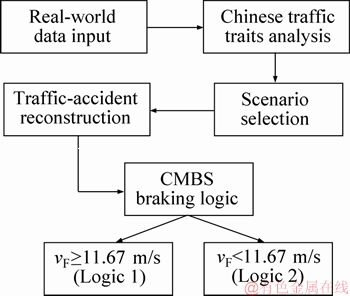
Figure 8 Methodology for calculating CMBS braking velocity
The CMBS braking logic [22] (see Figure 9) is expressed mathematically as
 (1)
(1)
where vF is the velocity of the following vehicle, m/s, and R is the distance between the leading vehicle and the following vehicle, m. It has two parts according to the estimated shortest time until the lead vehicle stops: if the lead vehicle is not expected to stop within t2, then the first part is selected; otherwise, the second part is used. Both scenarios assume that the lead vehicle engages in emergency braking, and the host vehicle does likewise after a reaction time t1 for the estimated safety range until t2. The suggested parameters are ��1=7.8 m/s2, ��2=7.8 m/s2, t1=0.5 s, and t2=1.5 s. RR(t) is range rate, which means the relative velocity.
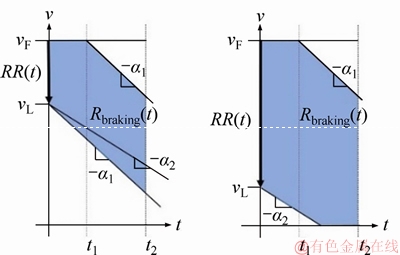
Figure 9 Schematic of CMBS braking logic [22]
To find the optimal values of several key CMBS radar parameters, the overall collision- avoidance rate of the CMBS is used as our criterion. Generally, for radar, a longer detection range represents a sufficient reaction time, and a larger detection angle means a strong ability to detect multiple objects simultaneously. However, as the detection angle or range increases, the quality and effectiveness of detection are more likely to be influenced by noise and disturbances.
Meanwhile, the configuration of the detection angle and range must be applicable to current detection technology. Therefore, the study of key radar parameters should be based on radar products available on the market. Consequently, these important parameters are chosen to maximize the accident-avoidance performance of the CMBS.
Table 2 gives the detection angles and ranges of typical radar products developed by Bosch and Delphi. From these critical values, the parameter ranges can be determined: the candidate detection angles are 20��, 30��, 40�� and 50��, and the candidate detection ranges are 100, 150, 200 and 250 m. There are i=4��4=16 combinations of different detection ranges and angles. Herein, we consider 11 situations, namely the aforementioned 10 scenarios and the entire database. Thus, there are N=i��(10+1)=16��11=176 simulations to be conducted altogether.
Table 2 Key parameters of typical long-range radar

4 Simulation results
The simulation results are listed in Table 3. Scenario 1 contains 71 collision cases between straight-driving subject vehicles and two-wheelers,accounting for 20.1% of the accident database. Scenario 9 includes 43 cases of collisions between turning vehicles and two-wheelers, accounting for 12.2% of the accident database. The results show that the collision-avoidance performance of the CMBS improves significantly as the detection angle is increased in scenario 1; it also improves moderately as the detection range is increased. However, increasing neither the detection angle nor the detection range influences the results for scenario 9.
Table 3 Collision-avoidance effectiveness (detection range = 100, 150, 200 and 250 m)
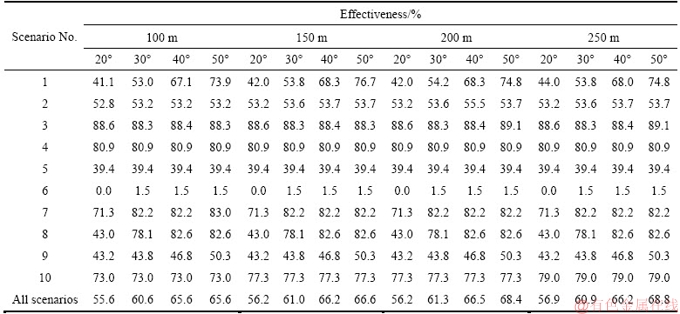
Scenario 2 includes 49 vehicle collisions with pedestrians, accounting for 13.9% of the accident database. The simulation analysis shows that the CMBS can prevent 53% of vehicle-pedestrian accidents. However, in an actual traffic environment, these results depend greatly on how effective the sensors are when detecting pedestrians.
Herein, there are 100 rear-end accidents in the accident database: 47 with the vehicle ahead driving at a constant velocity, 27 with the vehicle ahead decelerating, and 26 with a parked vehicle ahead. The simulation results show that the collision- avoidance effectiveness of rear-end cases is reduced to 88.3%, 80.9%, and 39.4% in scenarios 3, 4, and 5, respectively. Also, increasing the detection angle and range has no significant effect on the accident-avoidance ability of the CMBS if the base detection angle and range are at least 20�� and 100 m, respectively.
In scenarios 6 and 7, 26 side-collision accidents take place at intersections without traffic lights and 30 accidents take place at traffic-light street intersections, accounting for 7.37% and 8.50% of the accident database (Table 4), respectively. In scenario 6, the avoidance effectiveness is approximately zero. By contrast, in scenario 7, a collision is avoided in 25 cases, and the collision-avoidance effectiveness reaches a remarkable 82.2%. The obvious interpretation is that drivers concentrate more on driving when passing through a traffic-light street intersection. Furthermore, it also indicates that the CMBS has potentially better performance in traffic environments in which traffic lights are provided. Moreover, the simulation results show that traffic laws and regulations play a significant role in restraining driver behavior in China.
In scenario 8, there are eight lane-changing scraping-collision accidents between two cars traveling in the same direction, accounting for 2.27% of the accident database. In scenario 10, there are 26 lane-departure scraping accidents between two vehicles, accounting for 8.50% of the accident database. The CMBS shows excellent collision-avoidance performance for these two scenarios, and the efficiencies are all over 70% if the detection angle and range are at least 30�� and 100 m, respectively. The CMBS can mitigate scraping-collision accidents because there is sufficient distance between the two subject cars, allowing the simulation process to be conducted in the earliest seconds before the incident. Consequently, the CMBS has more time to slow down the vehicle. However, the CMBS does not perform effectively for accidents caused by lane changing. Therefore, with effective object identification by the sensor, the CMBS could offer much better performance. In addition, other ADAS features could be used to reduce such traffic accidents, such as a lane-keeping system or a lane-departure warning system.
The results for different detection ranges and angles are shown in Figures 10 and 11. It is shown in Figure 10 that the CMBS��s collision-avoidance performance and its significant changes in scenarios 1, 7, and 8 if the detection angle is changed. Generally, the performance of the CMBS improves with increasing detection angle. However, the performance increases only slightly in scenarios 7 and 8 if the detection angle exceeds 30��. In addition, the total collision-avoidance performance shows a slow increase under this condition. Meanwhile, if the detection angle is held constant, the collision-avoidance performance does not change much even if the detection range is increased to 250 m.
Table 4 Collision-avoidance effectiveness (detection angle=50��;detection range=200 m)
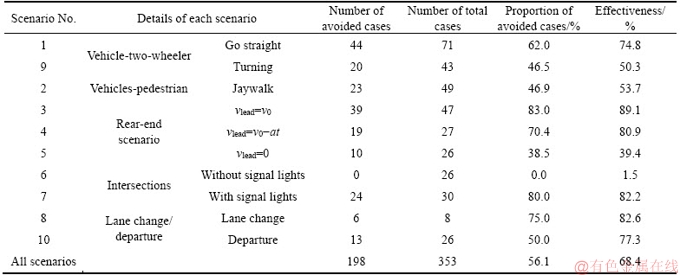
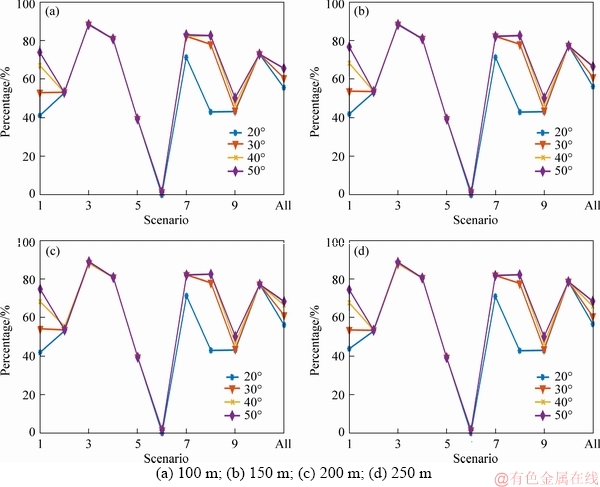
Figure 10 Collision-avoidance effectiveness for detection ranges of:
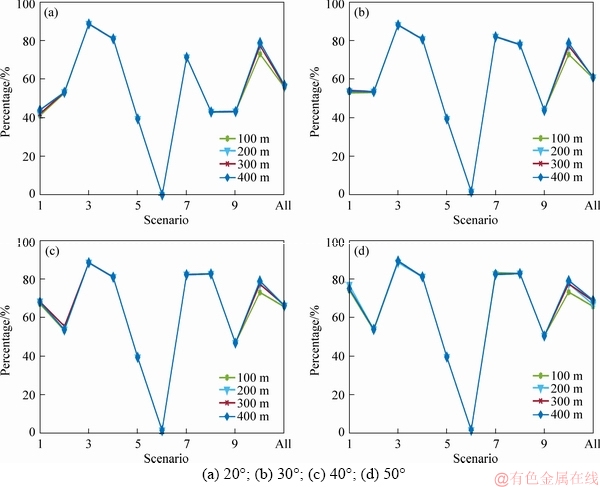
Figure 11 Collision-avoidance effectiveness for detection angles of:
If the detection angle and range are set to 50�� and 200 m, respectively, not only is the highest collision-avoidance performance obtained but also the product cost seems to be reasonable. The collision-avoidance performances of the CMBS in 10 typical scenarios are shown in Table 5 and Figure 12. Generally, on the basis of the hypothesis that object detection occurs accurately and without delay, the system achieves a high rate of overall collision avoidance (68.4%) in the Chinese traffic environment, especially for scenarios 3 (89.1%), 8 (82.6%), 7 (82.2%), and 4 (80.9%). For scenarios 1 and 10, the CMBS performs well because the rate of avoidance exceeds 70%. The rate drops to 39%-55% in scenarios 2, 5, and 9, and the CMBS has little effect in scenario 6 (1.5%).
We conducted a number of simulations to evaluate the collision-avoidance performance of the CMBS in different traffic-accident scenarios, all of which occurred in actual traffic-accident situations in China. Table 4 also shows that the proportion of avoided cases is always less than the collision- avoidance effectiveness, because the former calculates the number of collisions that have been avoided, accounting for whole collisions, whereas the latter simultaneously considers both the collision and mitigation situations if the accident is not completely avoided. vlead is the velocity of lead vehicle; v0 is a constant velocity; a is the acceleration of lead vehicle.
5 Improved CMBS algorithm based on driving safety field
We have previously presented the concept and theory of the driving safety field [30] and a vehicle collision-warning algorithm based on an associated model [31]. Those studies involved ideal results for the application of the driving safety field. In this section, we present an improved CMBS algorithm on the basis of the aforementioned collision-warning algorithm. The total safety potential energy (SPE1) of the ego vehicle is calculated as

 (2)
(2)
where M1, R1 and DR1 are the equivalent mass, the influencing factor of road condition, and the risk factor of the driver of the ego vehicle, respectively; Mi, Ri, DRi and vi are the equivalent mass, the influencing factor of road condition, the risk factor of the driver, and the velocity of vehicle i, respectively; ri1 is the distance between vehicle i and the ego vehicle; ��i is the angle between the directions of vi and ri1; hi is the weight of SPE1; K, k1 and k3 are constants; and n is the number of road users. All these parameters are set according to our previous study [32].
Table 5 Collision-avoidance effectiveness of improved CMBS (detection angle=50��; detection range=200 m)
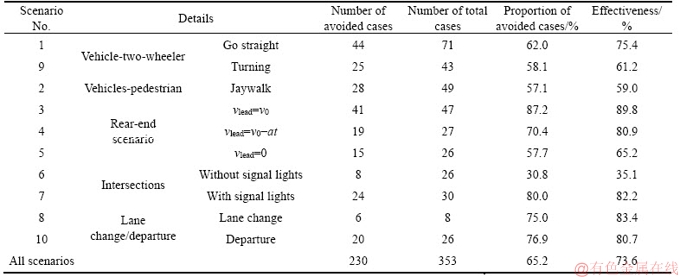
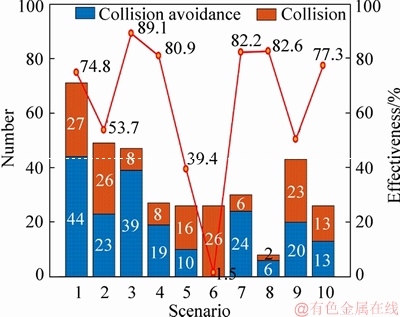
Figure 12 Collision-avoidance performance of CMBS for all accident scenarios
We define the specific form of the driving safety index (DSI1) as
 (3)
(3)
where �� is a weight that is set to ensure a balance between the spatial driving risk and the temporal driving risk;  is the rate of change of SPE1 and is calculated as
is the rate of change of SPE1 and is calculated as

 (4)
(4)
where  is the gradient vector of EV,i1; EV,i1 is the strength of the driving safety field on the ego vehicle due to vehicle i and is calculated as
is the gradient vector of EV,i1; EV,i1 is the strength of the driving safety field on the ego vehicle due to vehicle i and is calculated as
 (5)
(5)
Finally, we propose a new index called the relative driving safety index (RDSI), which for the ego vehicle (RDSI1) is defined as
 (6)
(6)
where DSI* is the standard driving safety index of the ego vehicle in a specific scenario.
5.1 Logic of improved CMBS algorithm
In the present study, the improved CMBS algorithm is designed on the basis of the RDSI and three levels of braking effort (safe, dangerous, and very dangerous).
1) Braking level I: safe
If RDSI<>1, then CB=0.
W1 is the safe-driving threshold, and CB is the braking level: CB=0 means safe (no braking); CB=1 means dangerous (slight braking); CB=2 means very dangerous (emergency braking).
2) Braking level II: dangerous
If W1<><>2, then CB=1.
W2 is the dangerous-driving threshold. If RDSI exceeds the safe-driving threshold (W1) but is below the dangerous-driving threshold (W2), the braking level is dangerous and the system executes active slight braking.
3) Braking level III: very dangerous
If RDSI>W2, then CB=2.
When RDSI exceeds the dangerous-driving threshold (W2), the braking level is very dangerous and the system executes active emergency braking.
Herein, we set W1=0.6 and W2=0.9 according to our previous research [31].
5.2 Performance of improved CMBS algorithm
To assess the effectiveness of the improved algorithm, we use the same simulation method on the basis of actual accident data and with a detection angle of 50�� and a detection range of 200 m. The simulation results are shown in Figure 13 and Table 5. In most scenarios, the collision-avoidance performance is moderately higher compared with the original algorithm. The number of avoided cases increases to 230, which is 32 more than before. Note that the proportions of avoided cases in scenarios 6 and 10 increase significantly to 30.8% and 76.9%, respectively.
From the simulation results, we infer that it is difficult for the original algorithm to recognize lateral risks. Therefore, its collision-avoidance performance is relatively weak at intersections without signal lights and for lane departure. In addition, the results show the advantages of the driving-safety-field model in recognizing driving risks in the Chinese traffic environment.
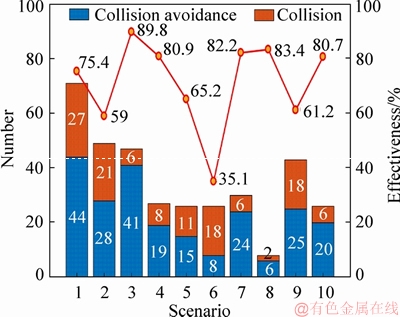
Figure 13 Collision-avoidance performance of improved CMBS for all accident scenarios
6 Discussion
Road-traffic deaths remain unacceptably high at 1.24 million per year globally [33]. This serious situation has triggered large-scale research in both academia and industry on active-safety technologies for vehicles. The present paper addresses the collision-avoidance performance of Honda��s CMBS according to Chinese traffic-accident data. In particular, 10 typical traffic-accident scenarios, which included 353 representative accident cases, were selected to test the system��s performance by co-simulation. The CMBS focuses mainly on rear-end collisions [28]; it shows favorable collision-avoidance performance in such scenarios and mitigates traffic accidents by 89.1%, 80.9%, and 39.4% in scenarios 3, 4 and 5, respectively. The CMBS shows excellent performance in scenarios 3 and 4 by achieving a remarkable accident- avoidance rate. However, the value in scenario 5 seems to be unpersuasive as it stands. In particular, the relative velocity of the two colliding vehicles in scenario 5 is much higher than those in scenarios 3 and 4 because the front-vehicle velocity in scenario 5 is zero. Thus, it is difficult for the CMBS to stop the subject vehicle within such a short time and range.
The CMBS shows good performance not only in rear-end scenarios but also in all scenarios other than scenario 6. The simulation results in Table 4 and Figure 13 show that the CMBS has great potential to avoid traffic accidents in Chinese traffic environments. However, some problems remain.
6.1 Accident database
It is more reliable and efficient to confirm the performance of active vehicle safety technologies using actual traffic-accident data. Herein, we selected 353 actual traffic accidents to build an accident database. However, this database could be expanded by incorporating other provinces in China. In addition, more research is required in this area by extending the present study to include new theoretical approaches.
6.2 Simulation conditions/scenarios
The CMBS has good robustness under the three assumptions made herein. Table 4 shows the avoidance rates for the CMBS in 10 scenarios, ranked from highest to lowest. In general, the CMBS is effective in mitigating traffic accidents in the Chinese traffic environment. However, the CMBS focuses mainly on detecting obstacles to avoid rear-end collisions. For scenarios involving pedestrians, bicycles, or targets in adjacent lanes, the system is less stable because the performance of sensors such as radars or cameras may be affected by weather, lighting conditions, or blind spots. Further research will focus on environmental- detection technologies.
6.3 Simulation platform
Some researchers favor PreScan for reconstructing traffic-accident scenarios, because it can display the process of a traffic accident highly accurately. However, PreScan has a limitation on performing the details of the collision, and it just achieves the effectiveness of accident mitigation. For this purpose, we chose the co-simulation platform of PC-Crash and rateEFFECT to propose a systematic analytical process of collision, which also proves the precision of evaluating the performance of the CMBS.
6.4 Improved CMBS algorithm
Unlike other existing algorithms, we used the novel theory of the driving safety field and an improved vehicle collision-warning algorithm to achieve better results for typical Chinese traffic environments. On the fundamental simulation results, we can achieve desirable outcomes in some scenarios but no significant improvement in others, from which we conclude that the improved algorithm can deal with typical scenarios despite some remaining weaknesses.
6.5 Driving-safety-field theory
In previous studies [30, 31], we analyzed the influencing factors of driving safety and the causes of traffic accidents. Driving safety is influenced by several factors, including drivers, vehicles, and road environments, and the interactions among them are quite complex. However, existing methods for evaluating driving safety are inadequate because they consider only limited factors and their interactions. Meanwhile, it is difficult for vehicle driving safety assistant systems based on kinematics and dynamics to adapt to increasingly complex traffic environments. To solve these problems, we have proposed a new concept of the driving safety field, which makes use of field theory to represent risk factors due to drivers, vehicles, road conditions, and other traffic factors. In the mathematical model of driving risks in the road traffic environment, we used (i) a potential field determined by nonmoving objects on the road (e.g., stopped vehicles), (ii) a kinetic field determined by moving objects on the road (e.g., vehicles and pedestrians), and (iii) a behavior field determined by the individual characteristics of drivers. Driving risks are illustrated directly by the field strength, as shown in Figure 14. Es denotes the field strength of the driving safety field.
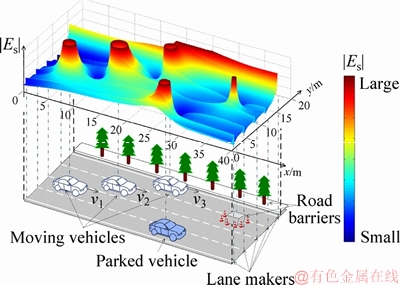
Figure 14 Multivehicle scenario and field strength of corresponding driving safety field [31]
Admittedly, we could also use other methods to improve the collision-avoidance performance of the CMBS algorithm. However, this model has been shown previously to be more sensitive especially in obstacle-avoidance scenarios; therefore, we chose to improve the algorithm based on this method. The simulation results show that driving-safety-field theory is highly effective for preventing accidents. To some extent, the present study shows that driving-safety-field theory is applicable to the road traffic environment in China.
6.6 More-effective collision avoidance
The collision-avoidance performance was compared between the original CMBS and the improved CMBS in this study. In general, the improved CMBS has better performance, especially in scenarios 6 and 10. Scenario 6 is an intersection without signal lights, but the two CMBS versions perform the same in scenario 7, which is an intersection with signal lights. The accident-scene diagrams showed that the relative velocity of the two colliding vehicles in scenario 6 was higher than that in scenario 7. Therefore, we reasoned that the original CMBS could not recognize the driving risk in the shorter reaction time in scenario 6. The improved CMBS benefits from the fact that the field strength effectively reflects risks in real time. Similarly, we reasoned that the driver is often more distracted in scenario 10 (lane departure) than in scenario 8 (lane departure), and the improved CMBS performs better in scenario 8.
Overall, the entire collision-avoidance performance of the improved CMBS is better than the original one. Nevertheless, in future work we will continue to validate and apply driving- safety-field theory.
7 Conclusions
This study analyzed accident data from the annual reports of traffic-accident statistics and concluded that the traffic-accident situation in China is gradually improving. Nevertheless, accidents related to passenger cars, pedestrians, and electric motorcycles remain serious, and the traffic situation in China is varied compared with other regions in the world. Therefore, enhancing active- and passive-safety technologies is necessary to consider Chinese traffic-accident characteristics.
Different methods were used to analyze Chinese traffic-accident characteristics and to evaluate the performance of the CMBS. Statistical methods represent a simple and original way of analyzing the current situation and indicating trends in Chinese traffic-accident environments. To some extent, this approach is convenient and accurate, but the accuracy of the analysis results is positively correlated with the accuracy of the original traffic-accident data.
A co-simulation platform combining the PC-Crash and rateEFFECT software was presented to simulate the collision-avoidance performance of the CMBS. The simulation results have a certain accuracy based on 353 cases of actual Chinese traffic accidents. The performances of other active-safety technologies (e.g., forward-collision warning system, lane-departure warning system, lane-keeping assistance) could also be evaluated using this co-simulation platform. Herein, we analyzed deeply the collision-avoidance performances of four AEBS algorithms and evaluated the CMBS algorithm, which contained 176 different parameter combinations and scenario simulations. The results confirmed the general applicability of the CMBS and yielded the optimum parameter combination for radar (detection range=200 m; detection angle=50��), with which the CMBS offers good performance in Chinese traffic environments. In addition, we presented an improved CMBS algorithm that showed relatively strong collision-avoidance performance and the existing CMBS algorithm still has room for improvement.
In conclusion, the performance of the CMBS has been demonstrated in simulated accident scenarios. The analysis showed that the CMBS represents an innovative safety system in the field of AEBSs and has its feasibility. Nevertheless, this system is not completely mature yet to use in China. Future work will focus on reducing traffic accidents by addressing two major aspects: (i) improving the CMBS algorithm by considering connected vehicle technologies and (ii) developing new ADAS functions by incorporating infrastructure into the assessment of the Chinese traffic situation.
Acknowledgments
We appreciate HUANG He-ye and CHEN Long for their valuable comments and helpful work. We would also like to thank ZHANG Wen-hao, WANG Xin-peng, LIU Yi-cong, XU Meng-di, and WU Qing-hui for their help with data collection and accidents reconstruction. In addition, we are very grateful to DOU Yang-liu and HUANG Bin for their help in language expression of this manuscript.
References
[1] TMBPSM. The PRC road traffic accident statistics annual report [R]. Traffic Management Bureau of the Public Security Ministry [2018-03-20]. http://www.stats.gov.cn/tjsj/ ndsj/. (in Chinese)
[2] ANDERSON R W, DOECKE S, MACKENZIE J R, PONTE G, PAINE D, PAINE M. Potential benefits of forward collision avoidance technology [R]. Queensland: Centre for Automatiove Safety Research, 2012. https://www. researchgate.net/publication/281236925.
[3] Euro NCAP. Test protocol��AEB systems [R]. Brussels, Belgium: Eur New Car Assess Programme (Euro NCAP), 2013. https://www.euroncap.com/en.
[4] PARK M K, LEE S Y, KWON C K, KIM S W. Design of pedestrian target selection with funnel map for pedestrian AEB system [J]. IEEE Transactions on Vehicular Technology, 2017, 66(5): 3597-3609. DOI: 10.1109/TVT.2016.2604420.
[5] KLIER T, LINN J. Corporate average fuel economy standards and the market for new vehiches [J]. The Annual Review of Resource Economics, 2011, 3: 445-462. DOI: 10.1146/annurev-resonrce-083110-120023.
[6] SOLEY Alexander. Regulation, industry, and the internet of cars [J]. DigiWorld Economic Journal, 2017, 105. https:// scholar.google.com.hk/scholar?cluster=11085340613508884825&hl=zh-CN&as_sdt=0,5
[7] PAINE M, PAINE D, SMITH J, CASE M, HALEY J, WORDEN S. Vehicle safety trends and the influence of NCAP safety ratings [J]. ESC. 2015, 20(41): 85. https://www-esv.nhtsa.dot.gov/proceedings/24/files/24ESV-000328.PDF.
[8] C-NCAP. C-NCAP administrative rules (2018 edition) [EB/OL]. [2018-07-20]. http://www.c-ncap.org/. (in Chinese)
[9] SEGAWA E, SHIOHARA M, SASAKI S, HASHIGUCHI N, TAKASHIMA T, TOHNO M. Preceding vehicle detection using stereo images and non-scanning millimeter-wave radar [J]. IEICE Transactions on Information and Systems, 2006, E89-D(7): 2101-2108. DOI: 10.1093/ietisy/ e89-d.7.2101.
[10] DUCHON F, HUBINSKY P, HANZEL J, BABINEC A, TOLGYESSY M. Intelligent vehicles as the robotic applications [J]. Procedia Engineering, 2012, 48: 105-114. DOI: 10.1016/j.proeng. 2012.09.492.
[11] BELGIOVANE D J, CHEN C C, CHIEN S Y P, SHERONY R. Surrogate bicycle design for millimeter-wave automotive radar pre-collision testing [J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(9): 2413-2422. DOI: 10.1109/TITS.2016.2642889.
[12] BAI Jie, CHEN Si-han, CUI Hua, BI Xin, HUANG Li-bo. 3D automotive millimeter-wave radar with two-dimensional electronic scanning [J]. SAE Technical Paper Series, 2017. DOI: 10.4271/2017-01-0047.
[13] HSU Ping-min, LI Ming-hung, CHANG Kuo-ching. Noise filtering in autonomous emergency braking systems with sensor fusions [J]. SAE Technical Paper Series, 2015. DOI: 10.4271/2015-01-0216.
[14] ZHENG Xun-jia, HUANG Bin, NI Dai-heng, XU Qing. A novel intelligent vehicle risk assessment method combined with multi-sensor fusion in dense traffic environment [J]. Journal of Intelligent and Connected Vehicles, 2018, 1(2): 41-54. DOI: 10.1108/JICV-02-2018-0004.
[15] LOEB H S, KANDADAI V, MCDONALD C C, WINSTON F K. Emergency braking in adults versus novice teen drivers: response to simulated sudden driving events [J]. Transportation Research Record: Journal of the Transportation Research Board, 2015, 2516(1): 8-14. DOI: 10.3141/2516-02.
[16] SALAANI M K, MIKESELL D, BODAY C, ELSASSER D. Heavy vehicle hardware- in-the-loop automatic emergency braking simulation with experimental validation [J]. SAE International Journal of Commercial Vehicles, 2016, 9(2): 57-62. DOI: 10.4271/2016-01-8010.
[17] XU Cheng-cheng, LIU Pan, WANG Wei, JIANG Xuan, CHEN Yu-guang. Effects of behavioral characteristics of taxi drivers on safety and capacity of signalized intersections [J]. Journal of Central South University, 2014, 21(10): 4033-4042. DOI:10.1007/s11771-014-2392-7.
[18] AUST M L, ENGSTROM J, VISTROM M. Effects of forward collision warning and repeated event exposure on emergency braking [J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2013, 18: 34-46. DOI:0.1016/j.trf.2012.12.010.
[19] CHOI J, YI K, SUH J, KO B. Coordinated control of motor-driven power steering torque overlay and differential braking for emergency driving support [J]. IEEE Transactions on Vehicular Technology, 2014, 63(2): 566-579. DOI: 10.1109/ TVT.2013.2279719.
[20] YIGITER O C, TANYEL S. Lane by lane analysis of vehicle time headways: Case study of Izmir ring roads in Turkey [J]. KSCE Journal of Civil Engineering, 2015, 19(5): 1498-1508. DOI:10.1007/s12205-014-0267-y.
[21] SEGATA M, LO CIGNO R. Automatic emergency braking: Realistic analysis of car dynamics and network performance [J]. IEEE Transactions on Vehicular Technology, 2013, 62(9): 4150-4161. DOI: 10.1109/TVT. 2013.2277802.
[22] LEE K, PENG H. Evaluation of automotive forward collision warning and collision avoidance algorithms [J]. Vehicle System Dynamics, 2005, 43(10): 735-751. DOI: 10.1080/00423110412331282850.
[23] MOORE M, ZUBY D. Collision avoidance features: initial results [C]// 23rd International Conference on the Enhanced Safety of Vehicles. Seoul, Korea: 2013. https://trid. trb.org/view/1359984.
[24] FILDES B, KEALL M, BOS N, LIE A, PAGE Y, PASTOR C, PENNISI L, RIZZ M, THOMAS P. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes [J]. Accident Analysis & Prevention, 2015, 81: 24-29. DOI: 10.1016/j.aap.2015.03.029.
[25] WU Ye, ZHANG Shao-jun, HAO Ji-ming, LIU Huan, WU Xiao-meng, HU Jing-nan, WALSHM P, WALLINGTON T J, ZHANG K M. On-road vehicle emissions and their control in China: A review and outlook [J]. Science of the Total Environment. 2017, 574: 332-349. DOI: 10.1016/j.scitotenv. 2016.09.040.
[26] Honda China released 2016 terminal car sales [EB/OL]. [2108-07-24]. http://www.honda.com.cn/news/detail.php?id= 20170106_01. (in Chinese)
[27] CICCHINO J B. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates [J]. Accident Analysis & Prevention, 2017, 99, Part A: 142-152. DOI: 10.1016/j.aap.2016.11.009.
[28] SUGIMOTO Y, SAUER C. Effectiveness estimation method for advanced driver assistance system and its application to collision mitigation brake system [C]// Proceedings of the 19th International Technical Conference on the Enhanced Safety of Vehicles. Washington, DC: National Highway Traffic Safety Administration, 2005: 05-0148. https:// pdfs.semanticscholar.org/4c48/e9da097ec84ed0955131686b9f28efacb64a.pdf.
[29] KUEHN M, HUMMEL T, BENDE J. Benefit estimation of advanced driver assistance systems for cars derived from real-life accidents [C]// 21st International Technical Conference on the Enhanced Safety of Vehicles ESV. Stuttgart, Germany, 2009: 18-27. https://pdfs. semanticscholar.org/7cff/312487fcace01e5506806604a12648e3762f.pdf.
[30] WANG Jian-qiang, WU Jian, LI Yang. The driving safety field based on driver�Cvehicle�Croad interactions [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2203-2214. DOI: 10.1109/TITS.2015.2401837.
[31] WANG Jian-qiang, WU Jian, ZHENG Xun-jia, NI Dai-heng, LI Ke-qiang. Driving safety field theory modeling and its application in pre-collision warning system [J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 306-324. DOI:10.1016/j.trc.2016.10.003.
[32] LI Yang, WANG Jian-qiang, WU Jian. Model calibration concerning risk coefficients of driving safety field model [J]. Journal of Central South University, 2017, 24(6): 1494-1502. DOI: 10.1007/s11771-017-3553-2.
[33] TOROYAN T, IAYCH K, PEDEN M. Global status report on road safety 2015 [R]. Geneva: World Health Organization, [2015-11-03]. http://www.who.int/entity/roadsafety/events/ 2015/Appendix_15.pdf?ua=1.
(Edited by ZHENG Yu-tong)
���ĵ���
��ײ�����ƶ�ϵͳ���й���ͨ�����µ���������
ժҪ���Ƚ���ʻ����ϵͳ���籾�����ײ�����ƶ�ϵͳ(CMBS)�������ڱ��Ͻ�ͨ��ȫ�����IJ�����Ȼ��ʻ���ݷ���������ϵķ������ܸ��õ�����CMBS���й���ͨ�����е����ܡ����ȣ������й���ͨ�����а�ȫΣ������Ķ����ԣ����ĸ��ݹ�ȥ17��Ľ�ͨ�¹�ͳ�����ݣ��������й���ͨ�¹ʵ��ص㣻��Σ�ɸѡ��ռ�ҹ���ͨ�¹�80%���ϵ�10�ֽ�ͨ�¹��龰�����ӱ����н�ͨ���������ռ���353�����д����Ե���ʵ�¹ʰ��������е���ʵ�¹ʰ����������¹��ֳ�ͼ��ͨ����ͨ�¹��ؽ�����PC-Crashʵ�����¹ʳ����ؽ�������ͨ���PC-Crash��rateEFFECT���Ϸ���ƽ̨���������ܼ�176����棬��CMBS�ı�ײ��Ч�Խ�����ϵͳ�Եķ����������������ʾ�����������Ч���ﵽ82.4%��˵����ϵͳ�������õı������ܣ��ܹ���߽�ͨ�������ƽ�ͨ������
�ؼ��ʣ�������ȫ�����������������¹��ؽ����Զ������ƶ���PC-Crash
Foundation item: Project(51625503) supported by the National Science Fund for Distinguished Young Scholars, China; Project(61790561) supported by the National Natural Science Foundation of China; Project(20163000124) supported by Tsinghua-Honda Joint Research, China; Project(TTS2017-02) supported by the Open Fund for Jiangsu Key Laboratory of Traffic and Transportation Security, China
Received date: 2018-07-24; Accepted date: 2019-03-02
Corresponding author: ZHENG Xun-jia, PhD; Tel: +86-18810216750; E-mail: zhengxj15@mails.tsinghua.edu.cn; ORCID: 0000-0002- 4736-320X
Abstract: Advanced driver-assistance systems such as Honda��s collision mitigation brake system (CMBS) can help achieve traffic safety. In this paper, the naturalistic driving study and a series of simulations are combined to better evaluate the performance of the CMBS in the Chinese traffic environment. First, because safety-critical situations can be diverse especially in the Chinese environment, the Chinese traffic-accident characteristics are analyzed according to accident statistics over the past 17 years. Next, 10 Chinese traffic-accident scenarios accounting for more than 80% of traffic accidents are selected. For each typical scenario, 353 representative cases are collected from the traffic-management department of Beijing. These real-world accident cases are then reconstructed by the traffic-accident-reconstruction software PC-Crash on the basis of accident-scene diagrams. This study also proposes a systematic analytical process for estimating the effectiveness of the technology using the co-simulation platform of PC-Crash and rateEFFECT, in which 176 simulations are analyzed in detail to assess the accident-avoidance performance of the CMBS. The overall collision-avoidance effectiveness reaches 82.4%, showing that the proposed approach is efficient for avoiding collisions, thereby enhancing traffic safety and improving traffic management.
